Изобретение относится к области ЗЬтоматического управления и может быть использовано в системах управления движением безрельсовых транспортных средств, эксплуатируемых, . в частности, при больших неровностях пола.
Целью изобретения является повышение точности определения отклоне- ния трансп ортного средства от заданной траектории.
На фиг, 1 представлена схема, поясняющая способ; на фиг,.2 - зависимость величины индуцируемого сигнала И от перемещения А транспортного средства и высоты h его колебаний; на фиг, 3 - расположение катушек и соответствующие им зависимости величины индуцируемых сигналов И от пе- ремещения А,
Способ: осуществляют следующим образом,
По направляющему проводу 1, уложенному в полу, пропускают переменный ток, а на транспортном средстве устанавливают три пары катушек 2,- которые включают дифференциально, Катугпки 2 устанваливают на концы магнитомягкого стержня 3, ось кото- рого перпендикулярна направляющему проводу. Катушки 2 устанавливают на транспортном средстве в плоскости, параллельной плоскости пола 4, так, что магнитные центры двух пар разнесены на расстояние, меньшее области линейности функции сигнал - перемещение, а третья пара устанавливается магнитным центром строго посередине между магнитными центрами первых двух пар катушек, Затем вычисляют перемещение А транспортного средства в направлении, перпендикулярном направляющему проводу, по формуле
М
Ui
Uj+U,
де М
и.
-константа, определяемая из одного контрольного эксперимента;
-индуцируемое напряжение на паре катушек, магнитный центр которой находится строго посередине магнитных центров двух других пар катушек;
Uo и и - индуцируемые напряжения на парах катушек, разQ
g 0
5 о
5
5
0
5
несенных магнитными центрами на расстояние, меньшее области линейности функции сигнал - перемещение; А - проекция на плоскость пола расстояния от направляющего цровода до магнитного центра катушек, индуцирующих напряжение и .
Схема, поясняющая способ работает следующим образом.
По направляющему проводу 1 пропускают переменный электрический ток, Катуг жи 2 и магнитомягкий стержень 3 образуют единую конструкцию и жестко соединены с транспортным средством. Для характеристики положения транспортного средства необходимо знать отклонение его вдоль оси А, перпендикулярной излучающему проводу и расположенной в плоскости пола. Если катушка 2 соединена в дифференциальную цепь, то существует такое их расположение относительно направляющего провода 1, когда сигнал равен нулю.
Точка а ., соответствующая нулевому значению индуцируемого сигнала, образованная пересечением оси стержня 3 с прямой Z, перпендикулярной плоскости пола 4 и проходящей через ось провода 1, является магнитным центром приемника.
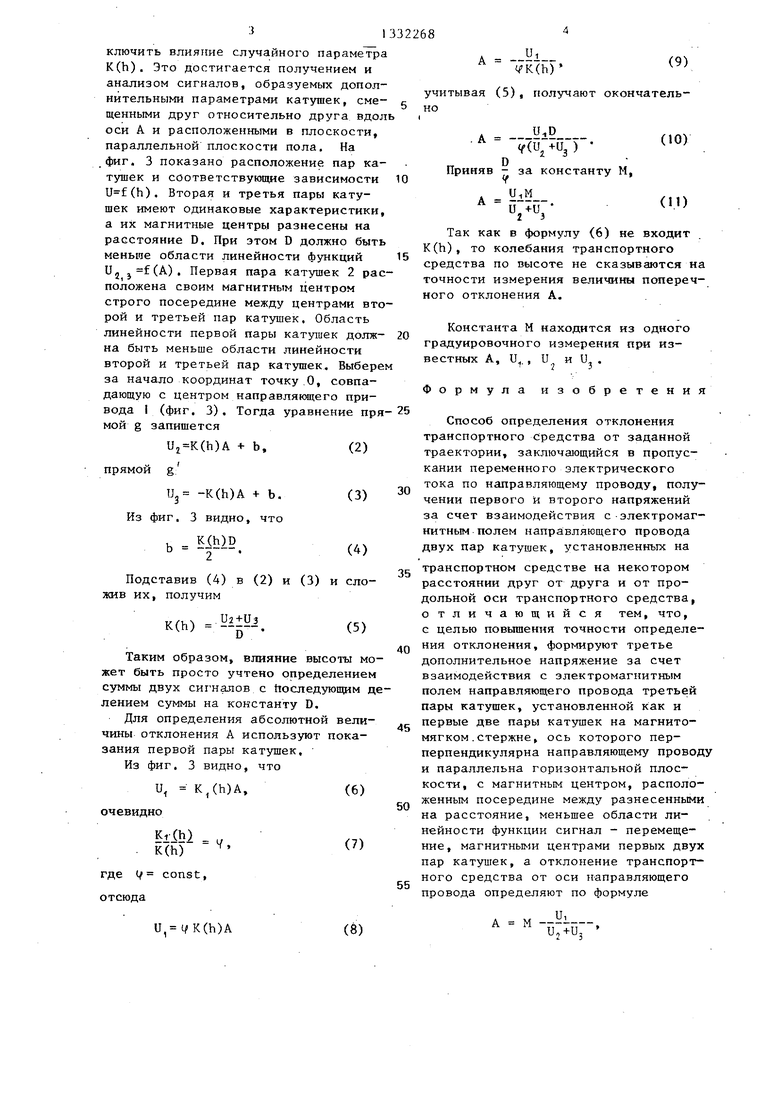
Приведенное на фиг, 1 расположение элементов приемника обладает тем свойством, что в значительных пределах зависимость величины дифферен- циального сигнала U от отклонения А носит практически линейн ый характер. При колебании приемника по высоте h сохраняется линейный характер функции (А), но меняется угол наклона, прямых. На фиг. 2 показан характер изменения сигнала U от перемещения А при разных высотах h.
Так как величина U характеризуется амплитудой переменного тока или напряжения, то прямые (A) распо-- ложены симметрично относительно оси Ои, Уравнение прямых имеет вид
и K(h)A; (1)
где К(Ь) - тангенс угла наклона, зависящий от высоты, Как следует из (И, для однозначного определения А необходимо ис- 1
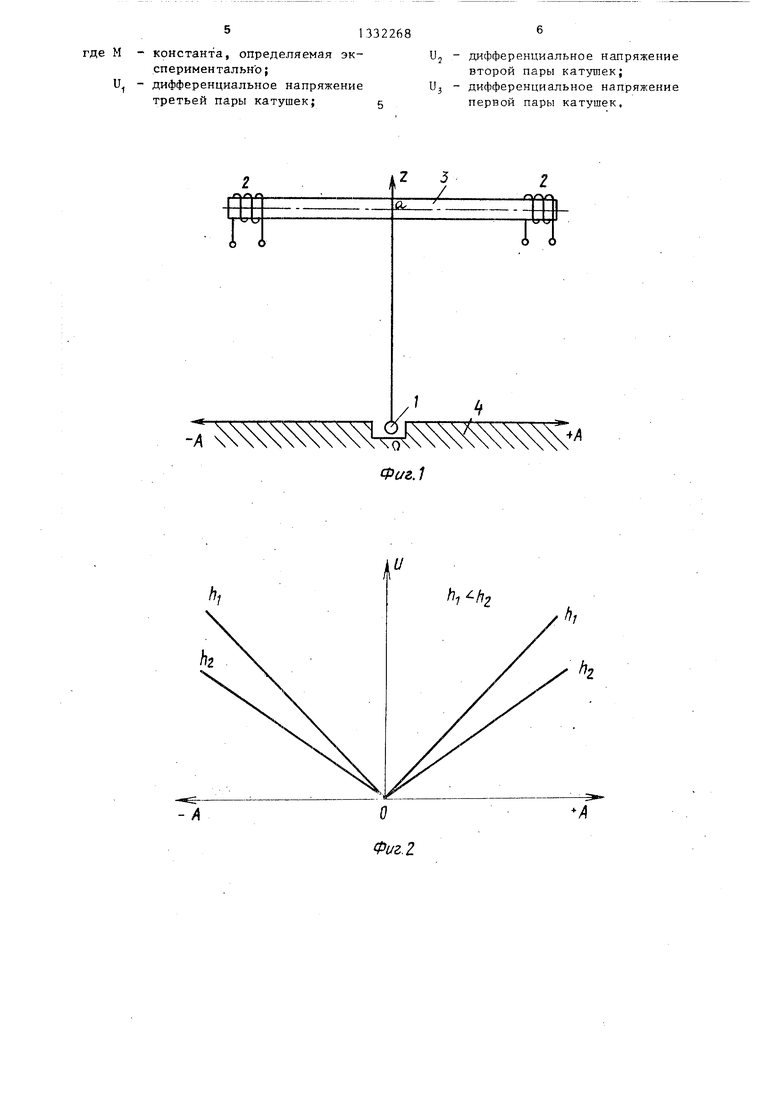
ключить влияние случайного параметра K(h). Это достигается получением и анализом сигналов, образуемых дополнительными параметрами катушек, сме- щенными друг относительно друга вдол оси А и расположенными в плоскости, параллельной плоскости пола. На .фиг. 3 показано расположение пар катушек и соответствующие зависимости (h). Вторая и третья пары катушек имеют одинаковые характеристики, а их магнитные центры разнесены на расстояние D, При этом D должно быть меньше области линейности функций Uj (A). Первая пара катушек 2 расположена своим магнитным центром строго посередине между центрами второй и третьей пар катушек. Область линейности первой пары катушек долж- на быть меньше области линейности второй и третьей пар катушек. Выбере за начало координат точку .0, совпадающую с центром направлякмцего привода 1 (фиг. 3). Тогда уравнение пря мой g запишется
(h)A b, (2)
Прямой g
1:3 -K(h)A + b. Из фиг. 3 видно, что
, K(h)D b - -- .
Подставив (4) в (2) и жив их, получим
.U2+U3
D
K(h)
Таким образом, влияние высоты может быть просто учтено определением суммы двух сигналов с исследующим делением суммы на константу D.
Для определения абсолютной величины отклонения А используют показания первой пары катушек,
Из фиг, 3 видно, что
и, K/h)A, очевидно
Kiibi
K(h) где (/ const, отсюда
Ч,
U, (h)A
(8)
4
А
-У1- VK (h)
(9)
учитывая но
(5), получают окончательА
y.,D
(и,из)
(10)
Приняв - за константу М,
А
UiM
и.и
(П)
Так как в формулу (6) не входит K(h), то колебания транспортного средства по высоте не сказываются на точности измерения величины поперечного отклонения А.
Константа М находится из одного градуировочного измерения при известных А, и., и и и. .
Формула изобретения
Способ определения отклонения транспортного Средства от заданной траектории, заключающийся в пропускании переменного электрического тока по направляющему проводу, получении первого и второго напряжений за счет взаимодействия с -электромагнитным полем напра:вляющего провода двух пар катушек, установленных на
транспортном средстве на некотором расстоянии друг от друга и от продольной оси транспортного средства, отличающийся тем, что, с целью повышения точности определения отклонения, формируют третье дополнительное напряжение за счет взаимодействия с электромагнитным полем направляющего провода третьей пары катушек, установленной как и первые две пары катушек на магнито- мягком.стержне, ось которого пер- перпендикулярна направляющему проводу и параллельна горизонтальной плоскости, с магнитным центром, расположенным посередине между разнесенными на расстояние, меньшее области линейности функции сигнал - перемещение, магнитными центрами первых двух пар катушек, а отклонение транспортного средства от оси направляющего провода определяют по формуле
А М
у, и,+и
М
и.
51332268
константа, определяемая эк- U - спериментально;
дифференциальное напряжение Uj - третьей пары катушек; 5
ОТ
дифференциальное напряжение второй пары катушек; дифференциальное напряжение первой пары катушек.
ОТ
Фс/г.1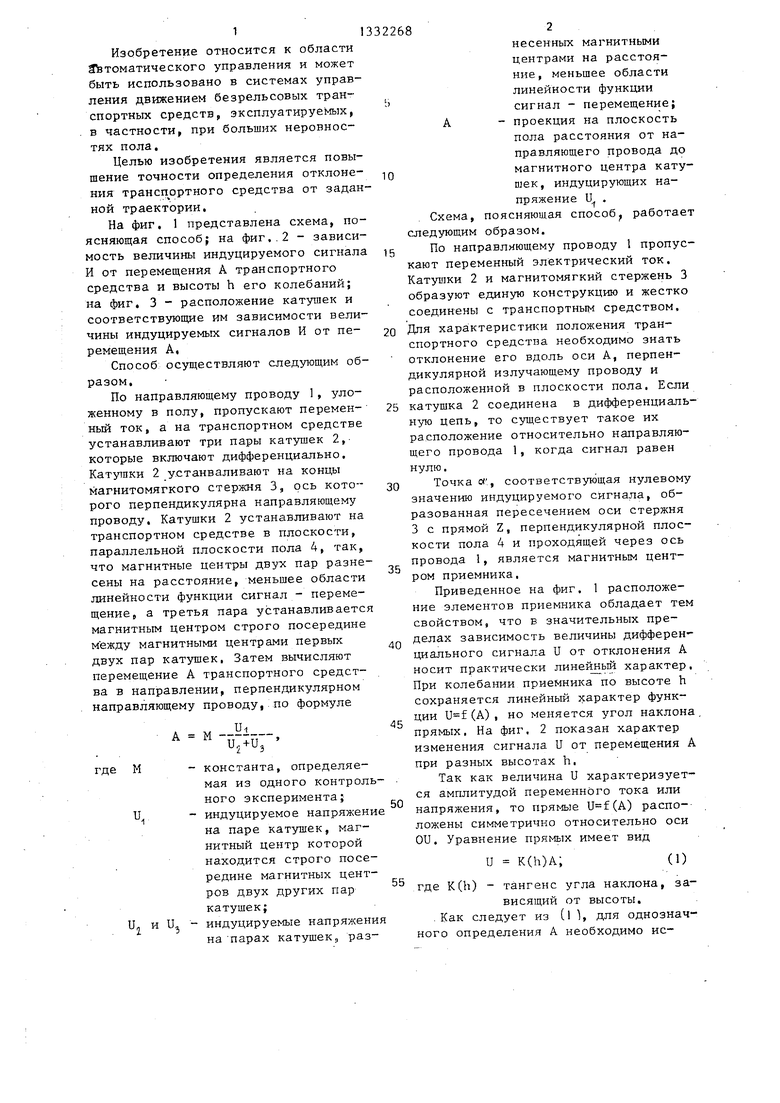
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения местоположения транспортного средства | 1985 |
|
SU1357920A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1995 |
|
RU2136035C1 |
| Устройство для управления движением транспортного средства | 1990 |
|
SU1783481A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2530704C1 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ДЕФЕКТОСКОПИИ | 2022 |
|
RU2796194C1 |
| Устройство для определения положения транспортного средства | 1986 |
|
SU1343393A1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАЗРЫВОВ ТРОСОВ ТРОСОВОЙ ОСНОВЫ РЕЗИНОТРОСОВЫХ КОНВЕЙЕРНЫХ ЛЕНТ | 1991 |
|
RU2016404C1 |
| ЭЛЕКТРОМАГНИТНАЯ РАЗВЕДКА ДЛЯ РЕЗИСТИВНЫХ ИЛИ ПРОВОДЯЩИХ ТЕЛ | 2006 |
|
RU2430387C2 |
| СПОСОБ ЛЕОНОВИЧА СЧИТЫВАНИЯ ТРЕХМЕРНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2074419C1 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ КОНТРОЛЯ КАЧЕСТВА УГЛЕПЛАСТИКОВЫХ ОБЪЕКТОВ | 2021 |
|
RU2778621C1 |
Изобретение относится к автоматическому управлению и решает задачу повьшения точности определения отклонения транспортного средства от заданной траектории. По направляющему проводу, уложенному в полу, пропускают переменный ток, а на транспортном средстве устанавливают три пары катушек, которые включают дифференциально . Катушки насаживают на концы магнитомягкого стержня, ось которого перпендикулярна направляющему проводу. Катушки устанавливают на транспортном средстве в плоскости. параллельной плоскости пола, таким образом, что магнитные центры двух пар разнесены на расстояние, меньшее области линейности функции сигнал - перемещение, а третья- пара устанавливается магнитным центром строго посередине между магнитными центрами первым двух пар катушек. Затем вычисляют перемещение А транспортного средства в направлении, перпендикулярном направляющему проводу по формуле ,/( )J , где М - константа, определяемая из одного контрольного эксперимента; U - индуцируемое напряжение на паре катушек, магнитный центр которой находится строго с U посередине магнитных центров двух других пар катушек; U,j и Uj - индуцируемое напряжение на парах катушек, разнесенных магнитными центрами на расстояние, меньшее области линейно- сти функции сигнал - перемещение; А - проекция на плоскость пола расстояния от провода до магнитного центра пары катушек, индуцирующих напряжение U, . 3 ил. (/)
-А
Фиг.
| Заявка ФРГ № 3032541, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| АКТИВНЫЙ КАТОДНЫЙ МАТЕРИАЛ, ОБЕСПЕЧИВАЮЩИЙ УЛУЧШЕННУЮ ЭФФЕКТИВНОСТЬ И ПЛОТНОСТЬ ЭНЕРГИИ ЭЛЕКТРОДА | 2009 |
|
RU2467434C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
