Изобретение относится к спутниковым системам определения местоположения наземного пользователя, причем этот пользователь находится на Земле, на море или где-нибудь на околоземной орбите.
Известно, что спутниковые системы определения местоположения включают совокупность навигационных спутников, расположенных на средневысотных орбитах (порядка 25000 км) вокруг Земли. Эти навигационные спутники и их орбиты в общем обозначают в технологии как «МЕО-спутники» и «МЕО-орбиты», соответственно (Medium Earth Orbit, средневысотная околоземная орбита). Навигационные спутники равномерно распределены в нескольких орбитальных плоскостях таким образом, что в любой точке Земли пользователь может видеть несколько навигационных спутников, другими словами, быть на прямых линиях с ними (по меньшей мере с тремя, но с четырьмя, если пользователь хочет знать свое положение по высоте) и выводить из этого свои собственные наземные координаты. Более того, для обеспечения нормального функционирования совокупности навигационных спутников предусмотрен по меньшей мере один наземный центр слежения, взаимодействующий со станциями связи, распределенными по поверхности Земли.
Для улучшения управления упомянутой совокупностью навигационных спутников уже было предложено, чтобы упомянутый центр слежения и упомянутые наземные станции связи были дополнены управляющими спутниками, расположенными на высоких орбитах (порядка 45000 км), способными, по меньшей мере частично, управлять упомянутыми навигационными спутниками и сообщаться с Землей.
Само собой разумеется, что изготовление, вывод на орбиты, ввод в действие и эксплуатация таких управляющих спутников на высоких орбитах связаны со значительными затратами так, что является предпочтительным ограничение числа упомянутых управляющих спутников.
Поэтому задачей настоящего изобретения является система наземного определения местоположения, обеспечивающая возможность решения этой задачи.
Для этой задачей система определения местоположения наземного пользователя, согласно изобретению, содержит:
первое множество навигационных спутников, расположенных на средневысотных орбитах;
второе множество управляющих спутников, расположенных на высоких орбитах, способных, по меньшей мере частично, управлять упомянутыми навигационными спутниками и сообщаться в Землей, отличается тем, что
упомянутое второе множество включает набор по меньшей мере из трех управляющих спутников, каждый из которых расположен на высокой орбите, плоскость каковой наклонена относительно плоскости земного экватора и пересекает последнюю по диаметральной прямой линии пересечения относительно Земли; и
две внешних диаметральных прямых линии пересечения составляют между собой угол по долготе, равный по меньшей мере 90º.
Таким образом, объекты размещены так, что в поле зрения каждого навигационного спутника присутствуют по меньшей мере два управляющих спутника, в то же время не заслоняя Землю.
Чтобы обеспечить стабильность связи между навигационными спутниками и управляющими спутниками, предпочтительно, чтобы плоскость, определяемая управляющими спутниками из упомянутого набора, постоянно была вне набора средневысотных орбит названного первого множества.
На практике упомянутый угол по долготе равен не более 160º, чтобы упомянутые управляющие спутники оставались в поле зрения упомянутой станции слежения.
Предпочтительно, наклонения плоскостей высоких орбит трех управляющих спутников упомянутого набора идентичны.
Чтобы уменьшить число наземных станций связи, предпочтительно, чтобы наклоненные высокие орбиты управляющих спутников упомянутого набора были геосинхронными.
В зависимости от времени видимые высоты трех управляющих спутников, при рассмотрении с экватора Земли, изменяются синусоидально. Далее, является предпочтительным, чтобы соответствующие синусоиды были сдвинуты на число часов, равное 24/n, причем значение n представляет собой число управляющих спутников упомянутого набора.
Фигуры в сопроводительных чертежах разъяснят способ, каковым изобретение может быть исполнено. В этих фигурах идентичными кодовыми номерами позиций обозначены сходные элементы.
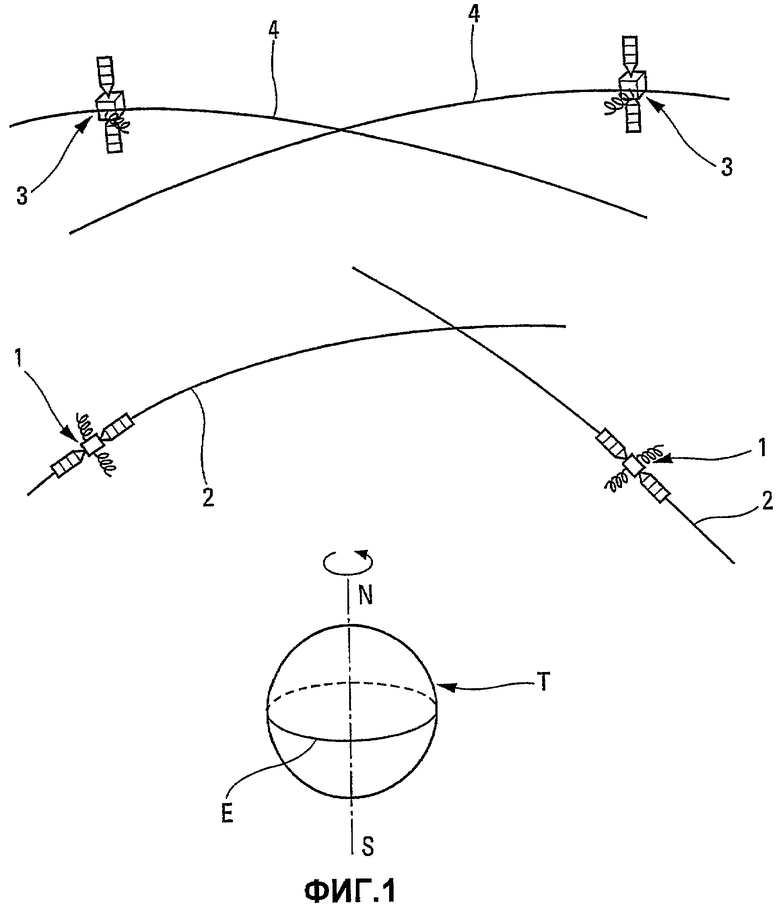
Фиг.1 представляет схематический и частичный вид спутниковой системы определения местоположения, включающей управляющие спутники на высоких орбитах.
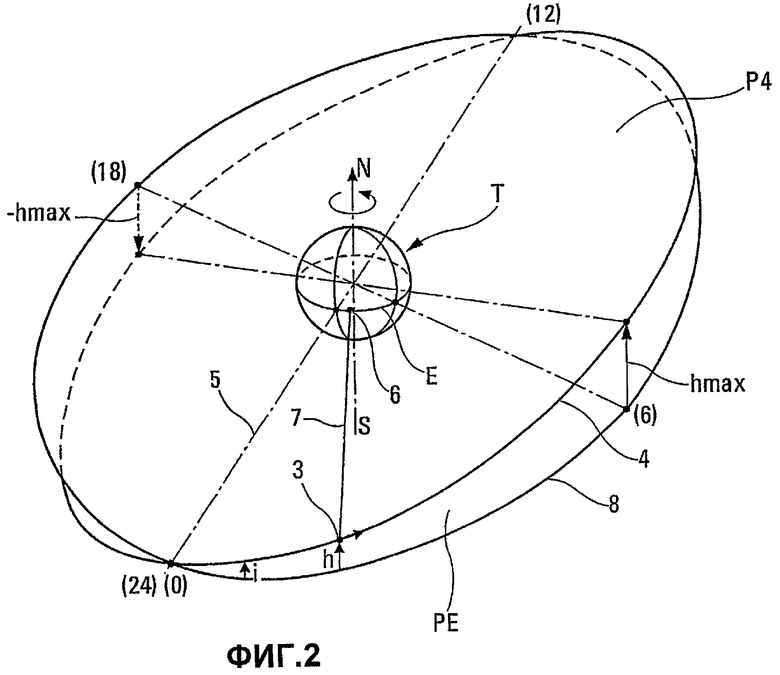
Фиг.2 показывает в схематическом перспективном изображении управляющий спутник, расположенный на геосинхронной высокой орбите.
Фиг.3 иллюстрирует траекторию управляющего спутника на фиг.2, наблюдаемую с экватора Земли.
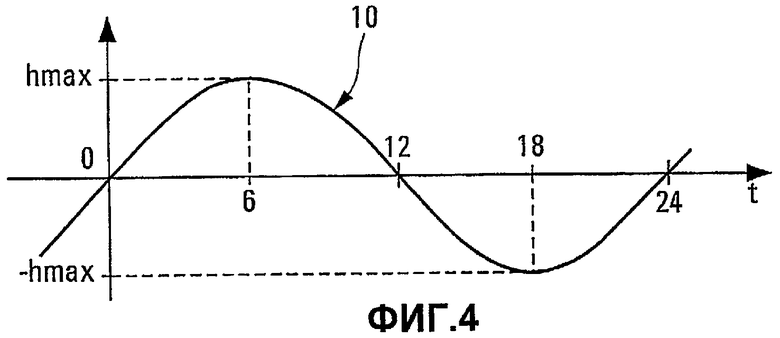
Фиг.4 представляет график, иллюстрирующий в виде зависимости от времени t (в часах), видимую высоту над экватором управляющего спутника на фиг.2 и 3.
Фиг.5 в схематическом и частично перспективном изображении иллюстрирует систему определения местоположения с тремя управляющими спутниками в соответствии с настоящим изобретением.
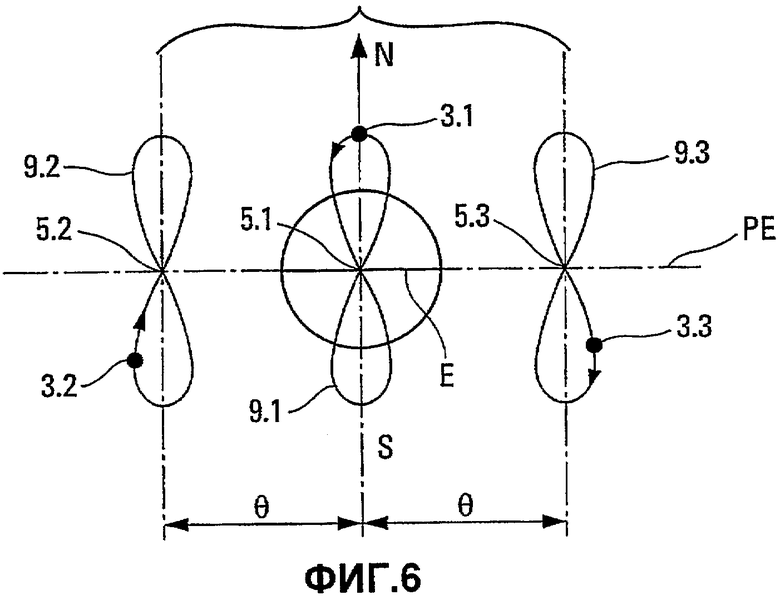
Фиг.6 в схематическом виде показывает набор кажущихся траекторий трех управляющих спутников системы на фиг.5.
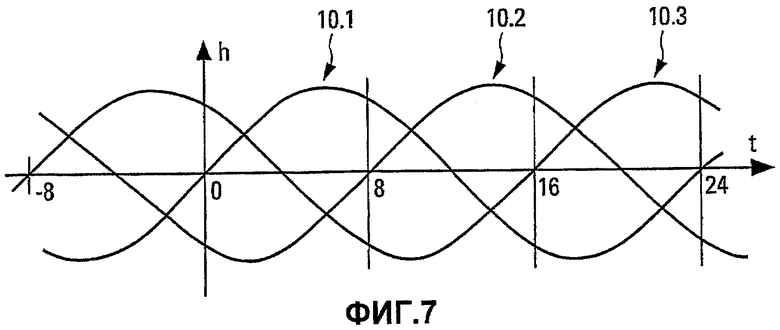
Фиг.7 представляет график, иллюстрирующий в зависимости от времени t (в часах) переплетение синусоидальных вариаций видимых высот трех управляющих спутников системы на фиг.5.
Известная спутниковая система определения местоположения, схематически и частично представленная в фиг.1, включает в себя:
- навигационные спутники 1, расположенные на средневысотных орбитах 2 (порядка 25000 км) вокруг Земли Т;
- управляющие спутники 3, расположенные на высоких орбитах 4 (порядка 45000 км) вокруг Земли Т.
Через центр слежения и наземные станции связи (не представлены) упомянутые управляющие спутники 3 могут управлять, по меньшей мере частично, навигационными спутниками 2, например, но не исключительно, таким образом, каковой описан во Французской патентной заявке №0703562, поданной 18 мая 2007 года от имени того же Заявителя.
Фиг.2, 3 и 4, предназначенные для более четкого разъяснения настоящего изобретения, описанного далее с привлечением фиг.5, 6 и 7, имеют отношение к одиночному управляющему спутнику 3, расположенному на высокой орбите 4. В этом случае (смотри фиг.2) данная высокая орбита 4 является геосинхронной, и ее плоскость Р4 наклонена под углом наклонения i относительно плоскости РЕ экватора Е. Пересечение плоскостей Р4 и РЕ составляет диаметральную прямую линию 5. Более того, на фиг.2 представлены:
- точка 6 экватора Е, лежащая в плоскости земного меридиана, проходящей через упомянутый управляющий спутник 3 и линию 7 прямой видимости, соединяющую упомянутую точку 6 с таковым;
- геостационарная орбита 8, расположенная в плоскости РЕ экватора Е, с периодом обращения в двадцать четыре часа и радиусом, равным 42000 км, причем эта геостационарная орбита соответствует ортогональной проекции высокой орбиты 4 на плоскость РЕ.
Поскольку высокая орбита 4 является геосинхронной, линия 7 прямой видимости остается направленной на управляющий спутник 3 по мере того, как последний следует по упомянутой высокой орбите 4, и экваториальная точка 6 вращается вместе с Землей вокруг оси последней, протяженной от Севера (N) к Югу (S).
Таким образом, для наблюдателя, находящегося на экваторе Е и способного наблюдать управляющий спутник 3, видимая высота h упомянутого управляющего спутника 3 варьирует синусоидальным образом по мере вращения земли Т и упомянутого спутника 3, поскольку плоскость Р4 геосинхронной высокой орбиты 4 наклонена относительно плоскости РЕ экватора Е. Синусоида 10, показательная для вариации видимой высоты h как функции времени t (в часах), была представлена на фиг.4.
Если допустить, как на фиг.4, что положение управляющего спутника 3 совпадает с диаметральной прямой линией 5 в 0 часов, эта видимая высота h равна нулю в 0 часов и в 12 часов, максимальна (значение hmax) в 6 часов и минимальна (значение -hmax) в 18 часов (смотри фиг.4).
Из этого следует, что для наблюдателя, находящегося на экваторе Е, управляющий спутник 3 описывает кажущуюся траекторию 9 в форме восьмерки с осью «Север-Юг», расположенную в плоскости, тангенциальной к упомянутой геосинхронной высокой орбите 4, и включающую в себя два симметричных лепестка, точка пересечения которых расположена на диаметральной прямой линии 5 пересечения (смотри фиг.3). Поэтому для данного наблюдателя можно полагать, что за двадцать четыре часа управляющий спутник 3 опишет кажущуюся траекторию 9 вокруг диаметральной прямой линии 5 пересечения.
Система определения местоположения наземного пользователя, соответствующая настоящему изобретению и представленная на фиг.5, в дополнение к множеству навигационных спутников 1, расположенных на средневысотных орбитах 2, включает три управляющих спутника 3.1, 3.2 и 3.3 (подобных спутнику 3), каждый из которых расположен на высокой орбите. Эти три высоких орбиты ради ясности в чертеже не представлены, но каждая из них подобна высокой орбите 4, описанной с привлечением фиг.2.
В точности подобно высокой орбите 4 в фиг.2, три геосинхронных высоких орбиты (соответственно подобных орбите 4), на которых соответственно расположены управляющие спутники 3.1, 3.2 и 3.3, лежат в плоскостях (соответственно подобных плоскости Р4), наклоненных относительно плоскости РЕ экватора Е и пересекающих упомянутую плоскость РЕ по диаметральным прямым линиям 5.1, 5.2 и 5.3 пересечения (каждая из которых подобна диаметральной прямой линии 5 пересечения), соответственно. Наклонения i плоскостей, содержащих высокие орбиты упомянутых управляющих спутников 3.1, 3.2 и 3.3, относительно упомянутой плоскости РЕ равны, и две диаметральных прямых линии 5.2 и 5.3 пересечения, которые лежат на каждой стороне от промежуточной диаметральной прямой линии 5.1 пересечения, составляют с последней угол по долготе θ, равный по меньшей мере 45º, и не превышающий 80º.
Более того, плоскость Р3, определяемая тремя управляющими спутниками 3.1, 3.2 и 3.3, находится вне набора средневысотных орбит 2, на которых расположены навигационные спутники 1.
Таким образом, подобно тому, как выше было сделано разъяснение в отношении спутника 3, каждый спутник 3.1, 3.2 и 3.3 для наблюдателя, находящегося на экваторе Е и наблюдающего их, описывает кажущуюся траекторию 9.1, 9.2 и 9.3 в форме восьмерки, с осью, ориентированной с Севера на Юг и расположенной в плоскости, тангенциальной геостационарной орбите 8, причем два лепестка каждой кажущейся траектории 9.1, 9.2 и 9.3 пересекают диаметральную прямую линию 5.1, 5.2 и 5.3 пересечения соответственно. Это иллюстрировано диаграммой на фиг.6, в которой три кажущихся траектории 9.1, 9.2. и 9.3 были представлены обращенными к наблюдателю.
Видимые высоты h упомянутых управляющих спутников 3.1, 3.2 и 3.3 поэтому варьируют синусоидальным образом в зависимости от времени t. Три соответствующих синусоиды 10.1, 10.2, 10.3 (причем каждая из которых подобна синусоиде 10 в фиг.4) были представлены в фиг.7.
В примере фиг.6 и 7 управляющий спутник 3.2 имеет фазу, смещенную на восемь часов относительно управляющего спутника 3.1, и фазу, на восемь часов сдвинутую относительно спутника 3.3.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА СПУТНИКОВОГО ПОЗИЦИОНИРОВАНИЯ | 2008 |
|
RU2383898C2 |
| СИСТЕМЫ СПУТНИКОВ НА НАКЛОННЫХ ОРБИТАХ | 2014 |
|
RU2660958C2 |
| СИСТЕМЫ СПУТНИКОВ НА НАКЛОННЫХ ОРБИТАХ | 2014 |
|
RU2660952C2 |
| СИСТЕМА СПУТНИКОВ НА ЭЛЛИПТИЧЕСКИХ ОРБИТАХ, ЭМУЛИРУЮЩАЯ ХАРАКТЕРИСТИКИ СИСТЕМЫ СПУТНИКОВ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2002 |
|
RU2223205C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2615634C2 |
| СПОСОБ НАБЛЮДЕНИЯ ПОВЕРХНОСТИ ПЛАНЕТЫ ИЗ КОСМОСА И КОСМИЧЕСКАЯ СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2013 |
|
RU2535375C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА ГАСАД-2А | 2005 |
|
RU2304549C2 |
| СПУТНИКОВАЯ СИСТЕМА РЕГИОНАЛЬНОЙ СВЯЗИ С ИСПОЛЬЗОВАНИЕМ ЭЛЛИПТИЧЕСКИХ ОРБИТ | 1999 |
|
RU2149507C1 |
| Гибридная наземно-космическая система связи | 2016 |
|
RU2660559C2 |
| ГЛОБАЛЬНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ ВОЗДУШНЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2578168C1 |

Настоящее изобретение относится к спутниковым системам определения местоположения наземного пользователя. Технический результат изобретения заключается в создании системы наземного определения местоположения, обеспечивающей возможность сокращения числа управляющих спутников на высоких орбитах. Согласно изобретению навигационные спутники (1), по меньшей мере, частично управляются, по меньшей мере, тремя управляющими спутниками (от 3.1 до 3.3), расположенными на высоких орбитах, наклоненных относительно экватора (Е). Упомянутые высокие орбиты пересекают экваториальную плоскость по пересекающей диаметральной прямой линии (от 5.1 до 5.3) так, что две внешние пересекающие диаметральные прямые линии (5.2, 5.3) составляют между собой угол по долготе (2G), который равен, по меньшей мере, 90°. 5 з.п. ф-лы, 7 ил.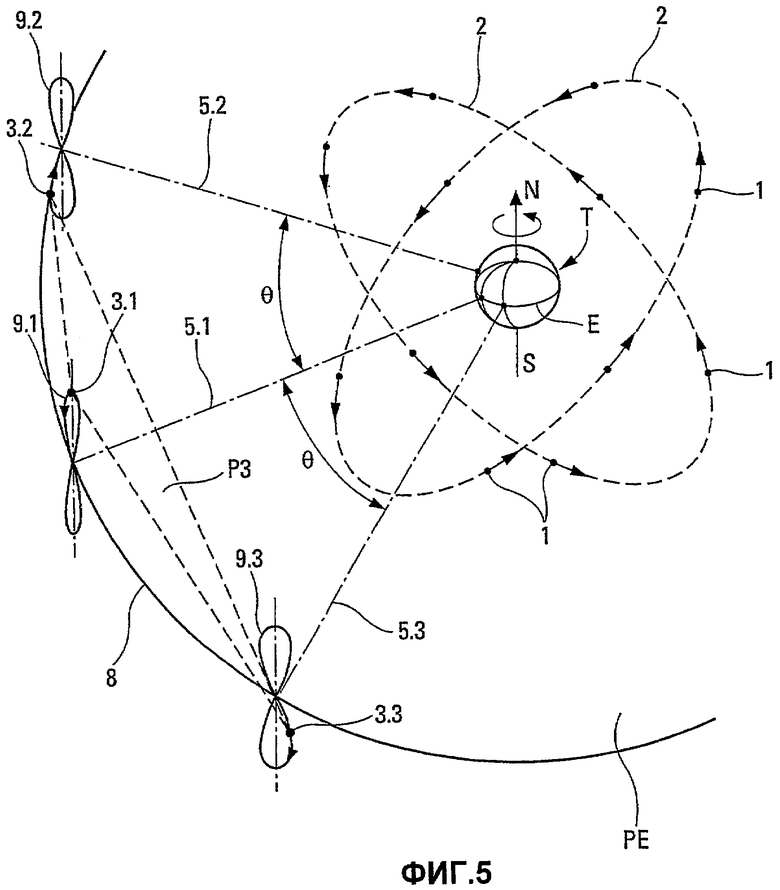
1. Система определения местоположения наземного пользователя, содержащая
первое множество навигационных спутников (1), расположенных на
средневысотных орбитах (2); и
второе множество управляющих спутников (3), расположенных на высоких орбитах (4), способных, по меньшей мере, частично, управлять упомянутыми навигационными спутниками (1) и сообщаться с Землей (Т), причем
упомянутое второе множество содержит набор, по меньшей мере, из трех управляющих спутников (3.1, 3.2, 3.3), каждый из которых расположен на высокой орбите, плоскость которой наклонена относительно плоскости (РЕ) земного экватора (Е) и пересекает последнюю по диаметральной прямой линии (5.1, 5.2, 5.3) пересечения относительно Земли (Т); и две внешних диаметральных прямых линии (5.2, 5.3) пересечения составляют между собой угол по долготе (2θ), равный, по меньшей мере, 90°.
2. Система по п.1, в которой плоскость, определяемая управляющими спутниками (3.1, 3.2, 3.3) упомянутого набора, постоянно находится вне набора средневысотных орбит (2) упомянутого первого множества.
3. Система по п.1, в которой упомянутый угол по долготе (2θ) составляет не более 160°.
4. Система по п.1, в которой наклонения (i) плоскостей высоких орбит управляющих спутников (3.1, 3.2, 3.3) упомянутого набора идентичны.
5. Система по п.1, в которой высокие орбиты управляющих спутников упомянутого набора являются геосинхронными.
6. Система по п.1, в которой синусоидально изменяющиеся видимые высоты (h) упомянутых трех управляющих спутников (3.1, 3.2, 3.3), наблюдаемые с Земли (Т), смещены по фазе на число часов, равное 24/n, причем значение n представляет число управляющих спутников в упомянутом наборе.
| СИСТЕМА, СПОСОБ И ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ В СИСТЕМЕ ОДНОЗНАЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДВУХ СПУТНИКОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2256935C2 |
| Интегрирующее устройство | 1990 |
|
SU1777159A1 |
| Клеевая композиция | 1979 |
|
SU880031A1 |
| WO 2005033733 А1, 14.04.2005. | |||

