Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного, морского и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Достижение высокой эффективности обнаружения, локализации и идентификации наземных, морских и воздушных объектов ограничивается существенной априорной неопределенностью размеров, ориентации в пространстве, отражающих свойств и параметров движения объектов, а также несовершенством известных способов обнаружения и слежения за подвижными объектами.
Технология скрытного обнаружения и слежения за подвижными объектами, использующая естественный радиоподсвет целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения в диапазонах коротких, метровых, дециметровых и сантиметровых волн: широковещательные (коммерческое FM-радиовещание, телевидение высокой четкости), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить скрытность и эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Известен способ обнаружения и пространственной локализации объектов [1], заключающийся в том, что выбирают передатчик, излучающий радиосигнал с расширенным спектром, синхронно принимают решеткой антенн многолучевые радиосигналы, включающие прямой радиосигнал передатчика и рассеянные от объектов радиосигналы этого передатчика, синхронно преобразуют ансамбль принятых антеннами радиосигналов в цифровые сигналы, из цифровых сигналов формируют прямые и сжатые рассеянные сигналы, сравнивают выделенные прямые и рассеянные сигналы и определяют временные задержки, доплеровские сдвиги и направления прихода рассеянных сигналов, по временным задержкам, доплеровским сдвигам и направлениям прихода выполняют обнаружение и пространственную локализацию воздушных объектов.
Данный способ не содержит операций подавления когерентной помехи в виде прямого радиосигнала передатчика и, как следствие, обеспечивает эффективное обнаружение только очень крупных близко расположенных объектов.
Более эффективным является способ обнаружения и пространственной локализации объектов [2], свободный от этого недостатка и выбранный в качестве прототипа. Согласно этому способу:
выбирают передатчик, излучающий радиосигнал с расширенным спектром;
синхронно принимают решеткой из N антенн многолучевые радиосигналы, включающие прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика;
синхронно преобразуют принятые антеннами радиосигналы в цифровые сигналы sn, где n - номер антенны, которые объединяют в матричный цифровой сигнал S={s1,…,sn,…,sN}T и запоминают;
из матричного цифрового сигнала S формируют сигнал пространственной корреляционной матрицы R, который преобразуют в сигнал оптимального весового вектора w=R-1v, где v - вектор наведения, определяемый азимутально-угломестным направлением приема прямого радиосигнала, длиной волны и геометрией решетки;
преобразуют матричный цифровой сигнал S в прямой цифровой сигнал s=wHS, который запоминают, где (·)H - символ эрмитова сопряжения;
формируют и запоминают зависящие от временного сдвига комплексные взаимно корреляционные функции (ВКФ) между цифровым сигналом отдельной антенны sn и прямым цифровым сигналом s;
определяют максимальное значение модуля каждой комплексной ВКФ и фиксируют соответствующие этим максимумам значения комплексной ВКФ;
вычисляют разностные цифровые сигналы;
формируют зависящие от временного и частотного сдвигов комплексные двумерные взаимно корреляционные функции (ДВКФ) между каждым разностным цифровым сигналом и прямым цифровым сигналом;
усредняют модули комплексных ДКФВ;
определяют по максимумам усредненной ДКФВ число сжатых сигналов и фиксируют значения задержки по времени и абсолютного доплеровского сдвига каждого р-го сжатого сигнала;
идентифицируют соответствующие отдельному максимуму усредненной ДКФВ составляющие комплексных ДКФВ как сжатый по времени и частоте р-й сигнал;
выделяют и запоминают значения составляющих комплексных ДКФВ, задержки по времени и абсолютного доплеровского сдвига каждого р-го сжатого сигнала;
по выделенным значениям р-х идентифицированных составляющих комплексных ДКФВ синтезируют комплексный двумерный угловой спектр, по максимумам модуля которого определяют азимутально-угломестное направление прихода р-го сжатого сигнала;
по значениям задержки и абсолютного доплеровского сдвига и азимутально-угломестного направления прихода обнаруживают и определяют пространственные координаты подвижных объектов.
Способ-прототип благодаря наличию операций адаптивной пространственной фильтрации и операций радиоэлектронной компенсации когерентной помехи в виде мощного прямого радиосигнала передатчика подсвета обеспечивает обнаружение более широкого класса подвижных объектов. Однако способ-прототип содержит операции формирования классической двумерной взаимной корреляционной функции, которая, кроме основного лепестка, ширина которого ограничивает разрешающую способность обнаружения, содержит высокие боковые лепестки, маскирующие сигналы далеких и слабо рассеивающих объектов.
Таким образом, недостатком способа-прототипа является низкое качество обнаружения и пространственной локализации малозаметных объектов.
Техническим результатом изобретения является повышение качества обнаружения и пространственной локализации малозаметных объектов.
Повышение качества обнаружения и пространственной локализации малозаметных объектов достигается за счет применения в каждом канале N-элементной антенной решетки новых операций адаптивной и нелинейной обработки, обеспечивающих повышение разрешающей способности и динамического диапазона синтеза частотно-временного изображения радиосигналов, рассеянных контролируемыми объектами.
Технический результат достигается тем, что в способе обнаружения и пространственной локализации объектов, заключающемся в том, что выбирают передатчик, излучающий радиосигнал с расширенным спектром, синхронно принимают решеткой из N антенн многолучевые радиосигналы, включающие прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют принятые антеннами радиосигналы в цифровые сигналы sn, где n - номер антенны, которые объединяют в матричный цифровой сигнал S={s1,…,sn,…,sN}T и запоминают, из матричного цифрового сигнала S формируют сигнал пространственной корреляционной матрицы R, который преобразуют в сигнал оптимального весового вектора w=R-1v, где v - вектор наведения, определяемый азимутально-угломестным направлением приема прямого радиосигнала, длиной волны и геометрией решетки, преобразуют матричный цифровой сигнал S в прямой цифровой сигнал s=wHS, который запоминают, где (·)H - символ эрмитова сопряжения, согласно изобретению преобразуют цифровой прямой сигнал s в матричный сигнал комплексной фазирующей функции А, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом, запоминают матричный сигнал А, преобразуют цифровой сигнал отдельной антенны sn в сигнал комплексного частотно-временного изображения 










Устройство, в котором реализуется предложенный способ, содержит последовательно соединенные систему приема и предварительной обработки 1, систему моделирования и выбора радиопередатчиков (РПД) 2, вычислительную систему 3 и блок управления и индикации 4.
В свою очередь система приема и предварительной обработки 1 включает антенную решетку 1-1, тракт поиска источников подсвета, включающий преобразователь частоты 1-2, АЦП 1-3 и устройство обнаружения 1-4, а также тракт приема прямых и рассеянных сигналов, включающий преобразователь частоты 1-7, АЦП 1-6 и устройство адаптивной пространственной фильтрации 1-5. Вычислительная система 3 включает блок синтеза частотно-временного изображения 3-1, блок сравнения 3-2, устройство формирования вспомогательного и взвешивающего сигнала 3-3 и блок формирования сигнала фазирующей функции 3-4. При этом система 2 соединена с входом блока 4, а также имеет интерфейс для соединения с внешней базой РПД. Кроме того, блок 4 имеет выход, предназначенный для подключения к внешним системам. Подсистема 1 является аналогово-цифровым устройством и предназначена для поиска и измерения параметров синхронизации передатчиков подсвета объектов, излучающих радиосигналы с расширенным спектром, а также для адаптивной пространственной фильтрации полезных прямых и рассеянных радиосигналов. Отметим, что после того как параметры синхронизации прямого радиосигнала выбранного передатчика подсвета измерены или когда они априорно известны, прямой радиосигнал передатчика может быть сформирован путем моделирования в системе 2.
Антенная решетка 1-1 состоит из N антенн с номерами 
Устройство работает следующим образом.
В системе 2 на основе данных внешней базы радиопередатчиков, а также данных об обнаруженных радиопередатчиках подсвета, поступающих от устройства 1-4, с использованием программных средств моделирования идентифицируется, выбирается и периодически обновляется совокупность передатчиков, излучающих радиосигналы с расширенным спектром. При моделировании оцениваются возможные зоны покрытия, вероятности обнаружения и достижимые точности локализации и идентификации воздушных объектов различного класса, которые могут быть обеспечены при различных вариантах размещения передатчиков относительно станции обнаружения-пеленгования. Кроме того, в системе 2 регенерируются принятые прямые радиосигналы или формируются модельные сигналы передатчиков с требуемыми параметрами синхронизации.
Параметры выбранного множества передатчиков (номер, несущая частота, ширина спектра, форма, параметры синхронизации и мощность излучаемого сигнала, координаты или расстояние и угловое положение относительно точки приема) запоминаются в подсистеме 2, поступают в блок 4, а также используются для настройки преобразователей 1-2 и 1-7. С целью упрощения цепи управления преобразователем не показаны.
По сигналам системы 2 преобразователь частоты 1-2 начинает перестраиваться с заданным темпом в заданном диапазоне частот поиска радиосигналов, например, в диапазоне 10-1000 МГц. При этом тракт поиска осуществляет поиск и измерение параметров синхронизации передатчиков подсвета, излучающих радиосигналы с расширенным спектром, на частотах fk дискретной сетки частот поиска. При этом принятый каждым антенным элементом с номером n антенной решетки 1-1 зависящий от времени t радиосигнал skn(t) фильтруется по частоте и переносится на более низкую частоту в преобразователе 1-2. Сформированные в преобразователе 1-2 радиосигналы skn(t) преобразуются с помощью АЦП 1-3 в цифровые сигналы, которые поступают в устройство обнаружения 1-4, в котором на каждой частоте fk дискретной сетки частот поиска осуществляется обнаружение и измерение параметров синхронизации передатчиков подсвета. Функционирование устройства обнаружения 1-4 основано на широко известных способах радиоконтроля, например, [3].
Одновременно по сигналам системы 2 преобразователь частоты 1-7 перестраивается на заданную частоту приема fk. Тракт приема синхронно принимает на частоте fk многолучевые радиосигналы, включающие прямой радиосигнал выбранного передатчика с расширенным спектром и рассеянные объектами радиосигналы этого передатчика.
Принятый каждым антенным элементом с номером n антенной решетки 1-1 зависящий от времени t радиосигнал sn(t) фильтруется по частоте и переносится на более низкую частоту в преобразователе 1-7.
Сформированные в преобразователе 1-7 радиосигналы sn(t) синхронно преобразуются с помощью АЦП 1-6 в цифровые сигналы sn={sn(1),…,sn(z),…,sn(Z)}, где 
Цифровые сигналы отдельных антенн sn поступают в устройстве 1-5, где объединяются в матричный сигнал S={s1,…,sn,…,sN}T и запоминаются. Матричный сигнал S имеет размерность N×Z.
Кроме того, в устройстве 1-5 выполняются следующие действия:
- из матричного цифрового сигнала S формируется N×N сигнал пространственной корреляционной матрицы R;
- сигнал корреляционной матрицы R преобразуется в N×1 сигнал
оптимального весового вектора w=R-1v, где v - N×1 вектор наведения, определяемый азимутально-угломестным направлением приема прямого радиосигнала, длиной волны (частотой fk) и геометрией решетки;
- преобразуется матричный цифровой сигнал S в 1×Z прямой цифровой сигнал s=wHS.
Физически описанные операции адаптивной пространственной фильтрации обеспечивают направленный прием полезного прямого радиосигнала выбранного передатчика подсвета с заданного направления с одновременным подавлением широкого класса помех, приходящих с других направлений. Отметим, что технически реализуемая глубина подавления помех достигает величины 40 дБ [4]. Это обеспечивает выигрыш в чувствительности при формировании слабых рассеянных сигналов на последующих этапах обработки.
Сформированный в устройстве 1-5 прямой цифровой сигнал s поступает и запоминается в блоке 3-4, а запомненные цифровые сигналы отдельных антенн sn поступают в устройство 3-1, где также запоминаются.
После этого, в блоке 3-4 цифровой прямой сигнал s преобразуется в матричный сигнал комплексной фазирующей функции А, который поступает в устройство 3-3, где запоминается.
Преобразование прямого сигнала s в матричный сигнал А осуществляют по следующей формуле: А=[Ds0,…,Dsj,…,Dsj-1], где sj=[s(1-j),…,s(z-j)]T- векторы размером Z×1, являющиеся сдвинутыми по времени на jTs версиями опорного сигнала s, j=0,…,J-1, J - число временных задержек прямого сигнала, Ts - период выборки сигнала;

- матрицы доплеровских сдвигов, ℓ=0,…,±L, L - размер координатной сетки по доплеровскому сдвигу.
Таким образом, столбцы матрицы А представляют собой задержанные по времени и сдвинутые по частоте доплеровского сдвига версии прямого сигнала S, а размер этой матрицы Z×J(2L+1), определяется числом отсчетов в разведываемом сигнале (длительностью интервала наблюдения) и размерами координатной сетки по временному запаздыванию и доплеровскому сдвигу частоты.
Кроме того, в устройстве 3-3 из сигнала а последовательно вычисляются сигналы AH, AHA и (AHA)-1, которые поступают в блок 3-1, где запоминаются.
В блоке 3-1 с использованием цифрового сигнала отдельной антенны sn, поступившего от устройства 1-5, и сигналов AH и (AHA)-1, поступивших от блока 3-3, вычисляется сигнал начального приближения комплексного частотно-временного изображения 
Полученный в блоке 3-1 сигнал
В устройстве 3-3 с использованием сигнала частотно-временного изображения, полученного на предыдущей итерации, то есть 





В блоке 3-1 с использованием сигнала 


В блоке 3-2 сигнал 
При выполнении условия k≤k0 сигнал
После чего, в устройстве 3-3, блоках 3-1 и 3-2 выполняется описанная ранее последовательность операций по формированию сигналов 



При невыполнении условия k≤k0 сигнал 


Учитывая, что сигнал текущего комплексного частотно-временного изображения

В блоке 4 выполняются следующие действия:
- усредняются модули текущих частотно-временных изображений отдельных антенн 
- по локальным максимумам усредненного частотно-временного изображения
- идентифицируются соответствующие отдельному максимуму усредненного изображения

- выделяются и запоминаются значения идентифицированных составляющих 
- по максимумам модуля синтезированного комплексного углового спектра определяется азимутально-угломестное направление прихода (αр, βр) р-го рассеянного сигнала;
- по значениям задержки τз, доплеровского сдвига Fр и азимутально-угломестного направления прихода (αp, βp) обнаруживаются и определяются пространственные координаты подвижных объектов.
Обнаружение и определение пространственных координат подвижных объектов осуществляется известными способами, например, [2];
- результаты обнаружения и пространственной локализации отображаются для повышения информативности.
Из приведенного описания следует, что устройство, реализующее предложенный способ, обеспечивает повышение качества обнаружения и пространственной локализации малозаметных объектов за счет применения в каждом канале N-элементной антенной решетки новых операций адаптивной и нелинейной обработки радиосигналов.
Таким образом, за счет применения в каждом канале N-элементной антенной решетки вместо классической двумерной взаимной корреляции операций адаптивной обработки с обратной связью по полезному радиосигналу и операций нелинейной обработки принятых радиосигналов, обеспечивающих повышение чувствительности, динамического диапазона и разрешающей способности синтеза частотно-временного изображения радиосигналов целей, удается решить поставленную задачу с достижением указанного технического результата.
Источники информации
1. US, патент, 6703968 В2, кл. G01S 13/87, 2004 г.
2. RU, патент, 2444754, кл. G01S 13/02, 2012 г.
3. RU, патент, 2190236, кл. G01S 5/04, 2002 г.
4. Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. М.: Радио и связь. 2003 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557250C1 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2723432C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2770176C1 |
| СПОСОБ СКРЫТНОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2724923C2 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО РАДИОКОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546330C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557251C1 |
| СПОСОБ ПОИСКА МАЛОЗАМЕТНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2528391C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546329C1 |
Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного, морского и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения. Достигаемый технический результат - повышение качества обнаружения и пространственной локализации малозаметных объектов. Повышение качества обнаружения и пространственной локализации малозаметных объектов достигается за счет применения в каждом канале N-элементной антенной решетки новых операций адаптивной и нелинейной обработки, обеспечивающих повышение разрешающей способности и динамического диапазона синтеза частотно-временного изображения радиосигналов, рассеянных контролируемыми объектами. 1 ил.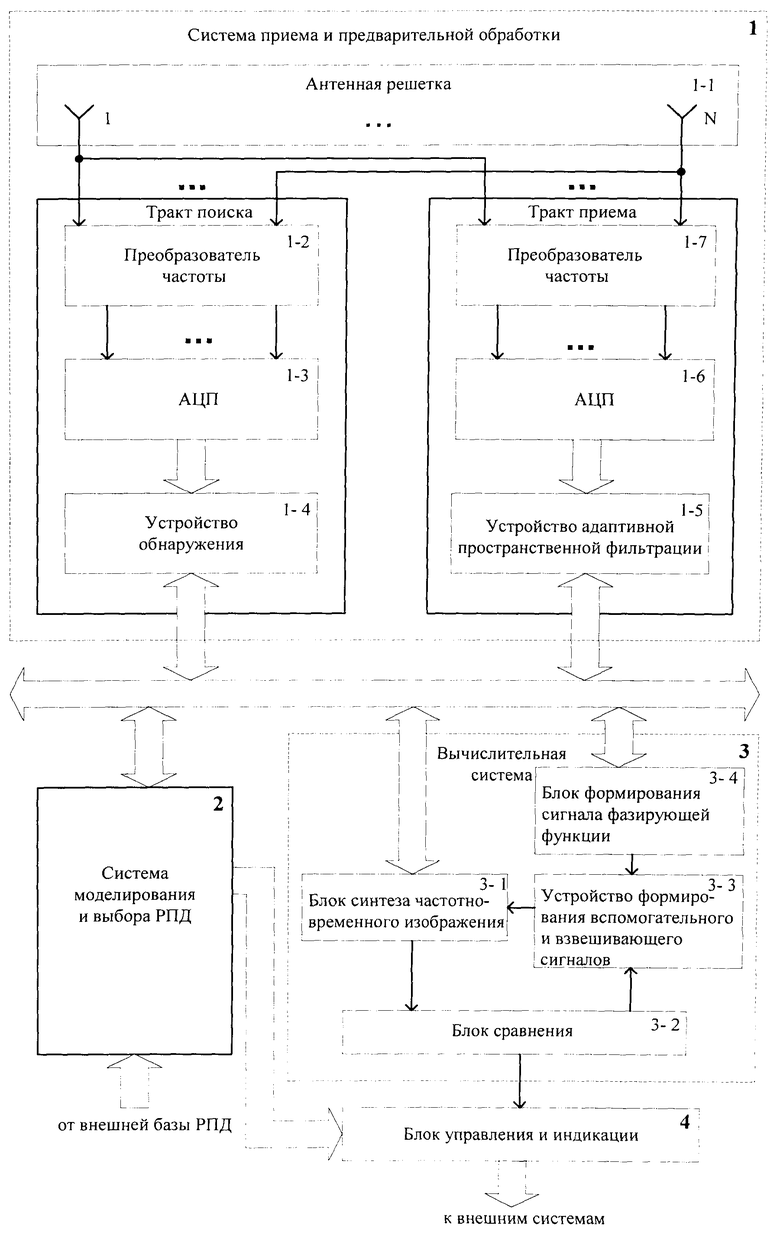
Способ обнаружения и пространственной локализации объектов, заключающийся в том, что выбирают передатчик, излучающий радиосигнал с расширенным спектром, синхронно принимают решеткой из N антенн многолучевые радиосигналы, включающие прямой радиосигнал передатчика и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют принятые антеннами радиосигналы в цифровые сигналы sn, где n - номер антенны, которые объединяют в матричный цифровой сигнал S={s1,…,sn,…,sN}T и запоминают, из матричного цифрового сигнала S формируют сигнал пространственной корреляционной матрицы R, который преобразуют в сигнал оптимального весового вектора w=R-1v, где v - вектор наведения, определяемый азимутально-угломестным направлением приема прямого радиосигнала, длиной волны и геометрией решетки, преобразуют матричный цифровой сигнал S в прямой цифровой сигнал s=wHS, который запоминают, где (·)H - символ эрмитова сопряжения, отличающийся тем, что преобразуют цифровой прямой сигнал s в матричный сигнал комплексной фазирующей функции А, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом, запоминают матричный сигнал А, преобразуют цифровой сигнал отдельной антенны sn в сигнал комплексного частотно-временного изображения 









| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444754C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| МЕТКА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И КОНТРОЛЯ ОБЪЕКТОВ | 2007 |
|
RU2371734C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЕКАМЕТРОВОГО ДИАПАЗОНА | 2009 |
|
RU2408895C2 |
| Сборная железобетонная крепь для горных выработок | 1957 |
|
SU112446A1 |
| JP 6213943 A, 05.08.1994 | |||
| US 5923285 A1, 29.03.2006 | |||
| WO 2003079041 A3, 25.09.2003 | |||
| EP 1471364 A2, 27.10.2004 | |||

