Изобретение относится к контрольно-измерительной технике, а именно к устройствам для дистанционного бесконтактного контроля пространственного положения частей протяженного объекта оптико-электронными методами, и может быть использовано для контроля неплоскостности, непараллельности, неперпендикулярности крупногабаритных протяженных сооружений в машиностроении, строительстве, самолето- и судостроении (например, танкеров, ледоколов, доков, нефтеналивных платформ, крыш зданий и т.п.), величин их прогибов и угла максимального скручивания в процессе эксплуатации.
Известно устройство для измерения деформаций транспортных плавучих доков (а.с. 346573, МКИ G01B 11/16, опубл. 01.01.1972), который позволяет регистрировать деформации дока длиной до нескольких сотен метров. Он содержит задатчик базового направления, содержащий расположенные последовательно объектив и призменный блок, образующий два оптических канала, а также установленные в каждом из каналов визирные цели. Причем визирные цели установлены в контролируемых точках дока, а задатчик базового направления - между контролируемыми точками.
К существенным недостаткам этого устройства можно отнести низкую точность измерений, обусловленную влиянием условий наблюдения и субъективностью визуальных измерений, невозможность контроля деформации носа и корпуса дока по отдельности и использования прогибомера в качестве датчика аварийной сигнализации и автоматической системы выравнивания дока. Это вызвано наличием в прогибомере лишь визуальной информации о прогибе и отсутствии электрических сигналов, связанных с величинами деформаций в контролируемых точках.
Известен оптический прогибомер, по совокупности существенных признаков являющийся наиболее близким к заявляемому изобретению и принятым за прототип (пат. РФ №2095755, от 06.06.95, МПК G01B 21/32, опубл. 10.11.1997), который обладает возможностями контролировать деформации носа и кормы по отдельности, использовать прогибомер в качестве датчика аварийной сигнализации и автоматической системы выравнивания дока и регистрировать только механическую составляющую прогиба. Устройство содержит последовательно расположенные призменный блок и объектив, предназначенный для образования двух оптических каналов, визирные цели, размещаемые в контролируемых точках объекта в соответствующих оптических каналах. Кроме того, устройство содержит соединенные последовательно координатный приемник оптического излучения (КПОИ), установленный перед объективом, и усилитель, программируемый контроллер с задатчиком в виде клавиатуры, блок питания и управления координатным приемником оптического излучения, подключенным к приемнику, устройства управления излучателем (УУИ), вход каждого из которых соединен с программируемым контроллером, а выход - с соответствующей визирной целью, выполненной в виде излучателя, индикаторное устройство и температурный датчик, также подключенные к программируемому контроллеру.
К существенным недостаткам этого устройства можно отнести то, что оно не позволяет измерять профиль деформации протяженного объекта, а также регистрировать максимальный угол скручивания поверхности, поскольку количество информации, обеспечиваемой размещением лишь двух визирных целей вдоль конструкции, является недостаточным для определения величин указанных деформаций протяженного объекта.
Другим недостатком рассматриваемого оптического прогибомера является отсутствие у него возможности учитывать вклад рефракции излучения в конечный результат измерений. Многолетний опыт проведения измерений оптическими способами показывает, что рефракция лучей вдоль протяженной оптической трассы может вносить ощутимую систематическую погрешность в результат измерений. Абсолютное значение погрешности, вносимой регулярной рефракцией, определяется выражением
 ,
,
где n - показатель преломления среды распространения,
Т1, T2 - температура в начале и конце трассы соответственно,
z - длина трассы.
К причинам, препятствующим достижению требуемого технического результата, относится отсутствие датчиков информации о температуре воздуха в крайних точках оптического канала между визирной целью и приемником излучения.
Кроме того, в рассматриваемом оптическом прогибомере информация, поступающая от фотоприемной части в вычислительную, обладает избыточностью, а поскольку при контроле крупногабаритных протяженных объектов зачастую возникает необходимость дистанцировать друг от друга упомянутые выше части прибора, то в этом случае возникает необходимость использовать каналы связи с высокой пропускной способностью, что может существенно повысить стоимость воплощения устройства. Этот недостаток может быть устранен реализацией распределенных вычислений с применением блока предобработки, предназначенного для сокращения избыточности видеосигнала, поступающего в блок обработки и преобразование его к форме, удобной для обработки. Кроме того, подобная реализация вычислений позволяет программируемому контроллеру вычислять координаты большего количества визирных целей без увеличения мощности последнего при сохранении быстродействия работы системы.
Задача, на решение которой направлено заявляемое изобретение, - обеспечение возможности контролировать профиль деформации протяженного объекта, максимальный угол скручивания конструкции, а также повышение точности измерений, при сохранении быстродействия системы.
Указанная задача решается за счет того, что в устройстве для контроля деформаций протяженного объекта, содержащем задатчик базового направления, включающий подключенный к блоку питания и управления и установленный перед объективом координатный приемник оптического излучения, оптически сопряженный через объектив и призменный блок с размещаемыми в контролируемых точках объекта в пределах поля зрения объектива в соответствующих оптических каналах, образованных этим призменным блоком, визирными целями, выполненными в виде излучателей, каждый из которых подключен к первому выходу устройства управления излучателем, второй выход каждого из которых подключен к первому входу блока обработки, а первый вход каждого из устройств управления излучателем соединен с первым выходом блока обработки, ко второму выходу которого подключено индикаторное устройство, а ко второму и третьему входам блока обработки подключены клавиатура и температурный датчик, новым является то, визирные цели размещены по периметру объекта, причем количество визирных целей не менее количества точек, определяющих геометрическую форму объекта, при этом каждая визирная цель дополнительно содержит датчик температуры воздуха, выход которого подключен ко второму входу соответствующего устройства управления излучателем, к четвертому входу блока обработки подключен датчик опорной температуры, закрепленный на корпусе задатчика базового направления, последний содержит усилитель, вход которого соединен с выходом координатного приемника оптического излучения, выполненного в виде матричного фоточувствительного прибора с зарядовой связью, а выход, являющийся выходом задатчика базового направления, подключен к пятому входу блока обработки через подключенные последовательно блок предобработки и устройство сопряжения блоков, причем третий выход блока обработки соединен через устройство сопряжения блоков со вторым входом блока предобработки.
Кроме того, каждый из излучателей выполнен в виде полупроводникового излучающего диода. Кроме того, блок обработки, клавиатура и индикаторное устройство объединены в блок, выполненный в виде переносной электронной вычислительной машины. Кроме того, объектив, координатный приемник оптического излучения, блок питания и управления им и усилитель объединены в блок, выполненный в виде телевизионной камеры.
Сущность изобретения поясняется чертежом, на котором изображена структурная схема устройства контроля деформаций протяженных объектов. Устройство состоит из визирных целей 1, выполненных в виде излучателей, расположенных по периметру измеряемого протяженного объекта (минимальное количество визирных целей равно количеству точек, однозначно задающих геометрическую форму объекта), устройств управления излучателями 2, задатчика базового направления 3, блока предобработки 4, устройства сопряжения блоков 5, блока обработки 6. Первые входы каждого УУИ 2 подключены к первому выходу блока обработки 6, а вторые выходы каждого УУИ 2 подключены к первому входу блока обработки 6, ко второму выходу которого подключено индикаторное устройство 7, ко второму, третьему и четвертому входам блока обработки 6 подключены клавиатура 8, температурный датчик 9 и закрепленный на корпусе задатчика базового направления 3 датчик опорной температуры 10 соответственно, пятый вход блока обработки 6 соединен с выходом усилителя 11 задатчика базового направления 3 через последовательно подключенные блок предобработки 4 и устройство сопряжения блоков 5, а третий выход блока обработки 6 соединен через устройство сопряжения блоков 5 со вторым входом блока предобработки 4. Задатчик базового направления 3 содержит последовательно расположенные призменный блок 12, создающий оптические каналы, объектив 13, КПОИ 14, соединенный с блоком питания и управления КПОИ 15 и усилитель 11, выход которого подключен ко входу блока предобработки 4, а вход - к выходу КПОИ 14. Каждая визирная цель 1 состоит из подключенного к первому выходу соответствующего УУИ 2 излучателя 16, оптически сопряженного с объективом 13 через призменный блок 12, и датчика температуры воздуха 17, подключенного ко входу соответствующего УУИ 2.
Устройство для контроля деформаций протяженного объекта работает следующим образом. Визирные цели 1 устанавливаются вдоль периметра объекта (минимальное количество визирных целей равно количеству точек, однозначно задающих геометрическую форму объекта). Задатчик базового направления 3 устанавливается между ними таким образом, чтобы все контролируемые точки находились в поле зрения объектива 13. По команде блока обработки 6 каждое УУИ 2 производит поочередное включение соответствующих излучателей 16, оптическое излучение которых, проходя через призменный блок 12, направляется в объектив 13, который формирует распределение облученности в плоскости изображения. Полученный оптический сигнал под управлением блока питания и управления КПОИ 15 преобразуется координатным приемником оптического излучения 14 в электрический сигнал, который, проходя через усилитель 11, поступает на вход блока предобработки 4. Последний проводит преобразование сигнала к цифровому виду и производит расчет положений изображений излучателей 16 в системе координат КПОИ 14. Рассчитанные координаты поступают на вход блока обработки 6 через устройство сопряжения блоков 5. После включения очередного излучателя 16, одновременно с процессом обработки информации о положении визирной цели 1, блок обработки 6 через соответствующий УУИ 2 запрашивает данные о температуре воздуха в оптическом канале. В этот момент УУИ 2 опрашивает датчик температуры воздуха 17 и направляет полученные данные в блок обработки 6, после чего на другой вход последнего поступает информация о температуре воздуха с датчика опорной температуры 10, закрепленного на корпусе задатчика базового направления 3. Далее в блоке обработки 6 производится расчет рефракционной составляющей систематической погрешности по формуле:
 ,
,
где n - показатель преломления среды распространения;
T1 T2 - температура, измеренная датчиком температуры воздуха 17, и температура, измеренная датчиком опорной температуры 10, соответственно;
zi - дистанция от датчика опорной температуры до i-й визирной цели 1;
и пересчет координат изображения источника в пространство предметов по формуле:
 ,
,
где hi - абсолютное отклонение i-й контролируемой точки;
 - вертикальная координата в изображении i-го излучателя на КПОИ 14;
- вертикальная координата в изображении i-го излучателя на КПОИ 14;
f' - фокусное расстояние объектива 13;
h0 - положение начала системы координат.
Величина температурной деформации рассчитывается блоком обработки 6 по данным, полученным от температурного датчика 9, установленного в среде расположения основания конструкции, по формуле:
ht=k(tB-tП),
где ht - температурная деформация;
tП - температура поверхности контролируемого объекта;
tB - температура основания контролируемого объекта, измеренная температурным датчиком 9;
k - коэффициент температурной деформации, определяемый конструкцией;
и величину механической составляющей прогиба по формуле:
 ,
,
где  - механическая составляющая прогиба i-й контролируемой точки;
- механическая составляющая прогиба i-й контролируемой точки;
hi - суммарный прогиб i-й контролируемой точки.
По найденному массиву значений деформаций  контролируемых точек объекта после аппроксимации значений отклонений точек, расположенных по каждой из сторон объекта, полиномом четвертой степени находится профиль деформаций. По значениям деформаций точек, определяющих геометрию объекта по известным соотношениям линейной алгебры находится угол максимального скручивания поверхности. Рассмотрим пример определения угла скручивания плавучего дока. Для этого на носу и корме конструкции должны быть установлены по две визирные цели. По найденным координатам изображений указанных визирных целей рассчитываются угловые коэффициенты прямых, определяющие наклон носа и кормы относительно горизонта по формулам
контролируемых точек объекта после аппроксимации значений отклонений точек, расположенных по каждой из сторон объекта, полиномом четвертой степени находится профиль деформаций. По значениям деформаций точек, определяющих геометрию объекта по известным соотношениям линейной алгебры находится угол максимального скручивания поверхности. Рассмотрим пример определения угла скручивания плавучего дока. Для этого на носу и корме конструкции должны быть установлены по две визирные цели. По найденным координатам изображений указанных визирных целей рассчитываются угловые коэффициенты прямых, определяющие наклон носа и кормы относительно горизонта по формулам
 ,
,  ,
,
где kH, kK - угловые коэффициенты прямых, определяющие наклон носа и кормы соответственно;
 ,
,  ,
,  ,
,  - вертикальные координаты изображений визирных целей, установленных на носу и корме соответственно;
- вертикальные координаты изображений визирных целей, установленных на носу и корме соответственно;
 ,
,  ,
,  ,
,  - горизонтальные координаты изображений визирных целей, установленных на носу и корме соответственно.
- горизонтальные координаты изображений визирных целей, установленных на носу и корме соответственно.
Искомая величина, т.е. угол максимального скручивания, рассчитывается по следующей формуле:
 ,
,
где φ - угол максимального скручивания конструкции дока.
Индикаторное устройство 7 служит для отображения полученных результатов, а клавиатура 8 - для задания режимов работы устройства, ввода пороговых значений деформаций, при превышении которых блок обработки 6 посылает сигналы включения аварийной сигнализации и автоматики выравнивания объекта.
Пример конкретного исполнения.
Излучатели выполнены в виде полупроводниковых излучающих диодов; датчики температуры воздуха, датчик опорной температуры и температурный датчик - в виде термодатчиков; устройства управления излучателем выполнены на основе микроконтроллеров семейства AVR. Объектив, координатный приемник оптического излучения, блок питания и управления им, а также усилитель собраны в единый корпус и представляют собой телевизионную камеру. Блок предобработки выполнен на основе микроконтроллера с ARM архитектурой. Устройство сопряжения блоков выполнено в виде преобразователя интерфейса. Блок обработки 6 выполнен в виде переносной электронной вычислительной машины со встроенной клавиатурой и индикаторным устройством (блок 6 соединен с индикаторным устройством 8 и клавиатурой 9 - см. чертеж и описание). Призменный блок представляет собой конструкцию блока призм, состоящую из пентапризмы с крышей и склеенной с нею прямоугольной призмой.
Таким образом, заявляемое изобретение обеспечивает создание устройства для контроля деформаций протяженного объекта, позволяющего контролировать профиль деформации протяженного объекта и максимальный угол скручивания поверхности, а также повысить точность измерений при сохранении быстродействия системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКИЙ ПРОГИБОМЕР | 1995 |
|
RU2095755C1 |
| ОПТИЧЕСКИЙ ПРОГИБОМЕР | 1993 |
|
RU2077701C1 |
| Устройство для контроля деформаций поверхности конструкций и сооружений большой площади | 2017 |
|
RU2658110C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2007 |
|
RU2344448C2 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2002 |
|
RU2273824C2 |
| ЛАЗЕРНЫЙ МОНОКУЛЯРНЫЙ ДАЛЬНОМЕР | 2012 |
|
RU2515418C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1998 |
|
RU2135954C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ (ВАРИАНТЫ) | 2006 |
|
RU2334934C2 |
Изобретение относится к контрольно-измерительной технике. Сущность: устройство состоит из задатчика базового направления (ЗБН), визирных целей (ВЦ), устройств управления излучателем (УУИ), блока предобработки (БПрО), устройства сопряжения блоков (УСБ) и блока обработки (БО), первые входы и выходы которого подключены к УУИ. Ко второму выходу - индикаторное устройство, ко второму, третьему и четвертому входам - клавиатура, температурный датчик и закрепленный на корпусе ЗБН датчик опорной температуры соответственно. Пятый вход БО соединен с усилителем ЗБН через подключенные последовательно БПрО и УСБ, а третий выход БО соединен через УСБ со вторым входом БПрО. ЗБН содержит расположенные последовательно блок питания и управления (БПиУ), координатный приемник оптического изображения (КПОИ), выполненный в виде матричного фоточувствительного прибора с зарядовой связью, выход которого соединен с усилителем, объектив, оптически сопряженный через призменный блок с размещаемыми в контролируемых точках объекта в пределах поля зрения объектива в соответствующих оптических каналах, образованных этим призменным блоком, визирными целями. Каждая ВЦ размещается по периметру объекта, причем количество ВЦ не менее количества точек, определяющих геометрическую форму объекта, и содержит излучатель, подключенный к первому выходу соответствующего УУИ, и датчик температуры воздуха, выход которого подключен ко второму входу соответствующего УУИ. Частные случаи исполнения устройства характеризуются тем, что каждый из излучателей выполнен в виде полупроводникового излучающего диода; блок обработки, клавиатура и индикаторное устройство объединены в блок, выполненный в виде переносной электронной вычислительной машины; объектив, КПОИ, БПиУ и усилитель объединены в блок, выполненный в виде телевизионной камеры. Техническим результатом является обеспечение возможности контролировать профиль деформации протяженного объекта, максимальный угол скручивания конструкции, а также повышение точности измерений при сохранении быстродействия системы. 3 з.п. ф-лы, 1 ил.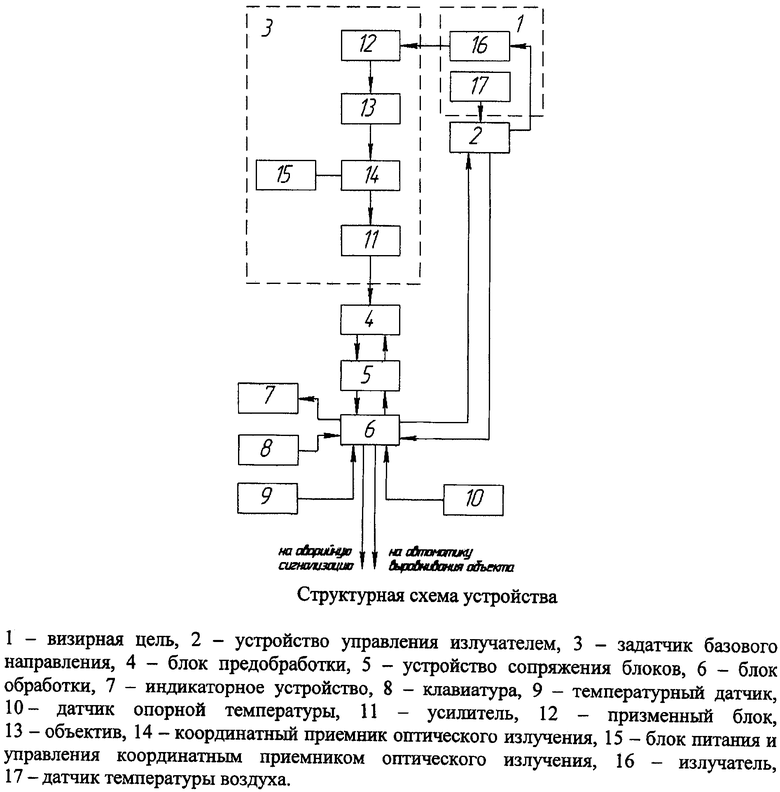
1. Устройство для контроля деформаций протяженного объекта, содержащее задатчик базового направления, включающий подключенный к блоку питания и управления и установленный перед объективом координатный приемник оптического излучения, оптически сопряженный через объектив и призменный блок с размещаемыми в контролируемых точках объекта в пределах поля зрения объектива в соответствующих оптических каналах, образованных этим призменным блоком, визирными целями, выполненными в виде излучателей, каждый из которых подключен к первому выходу устройства управления излучателем, второй выход каждого из которых подключен к первому входу блока обработки, а первый вход каждого из устройств управления излучателем соединен с первым выходом блока обработки, ко второму выходу которого подключено индикаторное устройство, а ко второму и третьему входам блока обработки подключены клавиатура и температурный датчик, отличающееся тем, что визирные цели размещены по периметру объекта, причем количество визирных целей не менее количества точек, определяющих геометрическую форму объекта, при этом каждая визирная цель дополнительно содержит датчик температуры воздуха, выход которого подключен ко второму входу соответствующего устройства управления излучателем, к четвертому входу блока обработки подключен датчик опорной температуры, закрепленный на корпусе задатчика базового направления, последний содержит усилитель, вход которого соединен с выходом координатного приемника оптического излучения, выполненного в виде матричного фоточувствительного прибора с зарядовой связью, а выход, являющийся выходом задатчика базового направления, подключен к пятому входу блока обработки через подключенные последовательно блок предобработки и устройство сопряжения блоков, причем третий выход блока обработки соединен через устройство сопряжения блоков со вторым входом блока предобработки.
2. Устройство по п.1, отличающееся тем, что каждый из излучателей выполнен в виде полупроводникового излучающего диода.
3. Устройство по п.1, отличающееся тем, что блок обработки, клавиатура и индикаторное устройство объединены в блок, выполненный в виде переносной электронной вычислительной машины.
4. Устройство по п.1, отличающееся тем, что объектив, координатный приемник оптического излучения, блок питания и управления им и усилитель объединены в блок, выполненный в виде телевизионной камеры.
| ОПТИЧЕСКИЙ ПРОГИБОМЕР | 1995 |
|
RU2095755C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ ПРОТЯЖЕННОГО ОБЪЕКТА | 1992 |
|
RU2032144C1 |
| RU 94023742 А1, 20.12.1995 | |||
| ОПТИЧЕСКИЙ ПРОГИБОМЕР | 1993 |
|
RU2077701C1 |
| Устройство для измерения угловых деформаций объекта | 1986 |
|
SU1408206A1 |
| WO 2004015368 А1, 19.02.2004 | |||
| WO 2005119171 А1, 15.12.2005. | |||

