Изобретение относится к способам измерения относительных угловых деформаций, изгибов протяженных объектов посредством оптических лазерных устройств и может быть использовано для определения взаимного углового положения конструктивных элементов надводного корабля, например площадок со специальным оборудованием, расположенных в разных точках палубы, на разных уровнях.
Широко известен оптический способ измерения прогибов и углов скручивания корпуса корабля при помощи геодезических приборов [1]. Данный способ требует применения громоздкого оборудования и поэтому непригоден для измерения деформации корабля, находящегося в открытом море.
В настоящее время интенсивно внедряется способ определения геометрических параметров объекта лазерными методами [2,3]. В частности, известен способ, основанный на измерении линейных отклонений элементов объекта относительно реперной оси - лазерного луча. Измерения осуществляют с помощью квадратных фотодетекторов, установленных вместе с объективами на конструктивных элементах объекта. Путем сравнения сигналов, снимаемых с фотодетекторов, определяют величину относительного линейного смещения элементов конструкции.
Разновидностью этого способа можно считать измерение деформации объекта автоколлимационным методом [5]. Данный способ, выбранный в качестве прототипа, предполагает использование лазерного коллиматора и зеркала, связанных с элементами конструкции. При взаимном смещении последних изменяется сигнал, снимаемый с оптических приемников. По этой информации определяют величину деформации объекта.
Описанный способ реализуем в том случае, если есть возможность осуществить прямую оптическую связь между элементами объекта. Очевидно, для измерения деформации кораблей при жестких требованиях к целостности межотсековых переборок указанный способ практически не применим. Помимо этого, при использовании данного способа затруднено измерение углов скручивания корпуса корабля.
Задачей изобретения является разработка способа измерения деформации корабля при отсутствии прямой оптической связи между элементами деформируемого корпуса. При этом должны быть обеспечены достаточная точность и автономность работы системы измерений.
Сущность решения поставленной задачи заключается в том, что с помощью подсветки атмосферы коллимированные лазерным лучом, направленным от объекта (от корабля) в свободную точку пространства, формируют светящуюся область. Визируют положения светящейся области относительно элементов деформируемой конструкции посредством оптических приемников, связанных с элементами, и по результатам измерений углов визирования определяют взаимное угловое смещение элементов, т.е. величину деформации корабля. Очевидно, визируемая область излучения должна находиться на достаточном удалении от средств наблюдения.
Сопоставительный анализ с прототипом показал, что отличительными признаками предложенного способа являются формирование с помощью коллимированного лазерного луча светящейся области в свободном пространстве и определение угловой деформации по результатам измерений, осуществляемых относительно направления визирования светящейся области.
Указанная совокупность отличительных признаков обеспечивает достижение технического результата, заключающегося в отсутствии необходимости врезки оптических окон в конструкцию корпуса и в обеспечении измерения деформации, в том числе и углов скручивания корпуса, независимо от взаимного положения элементов конструкции корабля, что способствует повышению эффективности применения специальных систем, размещенных на корабле, а также положительно сказывается на увеличении срока службы корабля.
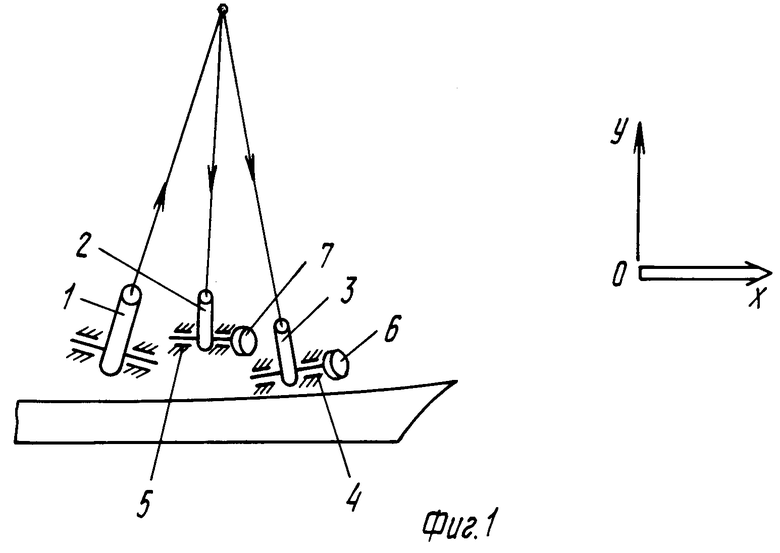
На фиг.1, 2, 3 показана схема размещения на корабле устройств, обеспечивающих реализацию способа.
Для осуществления предложенного способа используют лазерный источник 1, установленный на корабле, оптические приемники 2, 3 с объективами, установленные посредством двухстепенных подвесов на элементах конструкции 4, 5, например на площадках, относительное угловое положение которых необходимо контролировать. Измерительные оси подвесов снабжены датчиками 6, 7 угла. Аналогичный подвес используется для установки лазерного источника 1.
На чертеже показаны двойной стрелкой оси связанной системы координат, относительно которых производят измерение деформации при заданной ориентации приборов, а также направление распространения прямого и обратного лазерных лучей.
Для измерения углов деформации при изгибах корпуса вокруг оси ОХ луч лазерного источника 1 направляют в верхнюю полусферу, ориентируя луч в плоскости, ортогональной продольной оси корабля, как это показано на фиг.1. Выбор угла места зависит от ориентации корабля относительно сторон света, времени суток. Основным условием для выбора является отсутствие мешающего излучения Солнца и других источников. При использовании средств наблюдения с достаточно узким полем зрения сложностей с выбором направления лазерного луча, как правило, не возникает. В процессе измерения определяют с помощью оптических приемников 2, 3 направление на источник рассеянного назад лазерного излучения. Затем, сравнивая показания датчиков углов 6, 7, определяют взаимное угловое положение элементов конструкции 4, 5, т.е. наличие деформации корпуса относительно продольной оси, в том числе углов скручивания корпуса. Первоначально все перечисленные операции производят перед выходом в море на спокойной воде, с целью определения исходного положения приборов, относительно которого осуществляют отсчет.
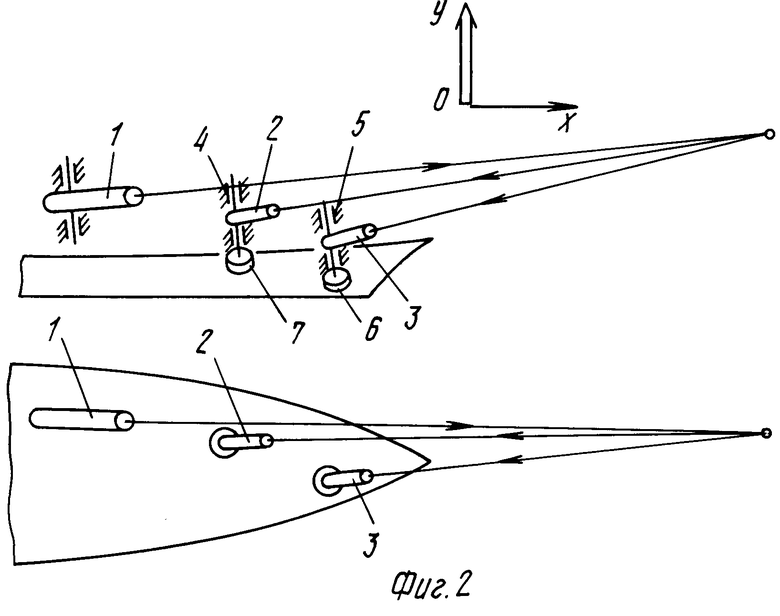
Для измерения углов деформации, возникающих при смещении элементов конструкции в плоскости палубы вокруг оси ОY, лук лазерного источника 1 направляют в точку, расположенную впереди по курсу корабля под острым углом к горизонту, как это показано на фиг.2. Возможна также ориентация лазерного луча в обратном направлении, от кормы корабля. Последовательность операций при измерении деформаций не отличается от описанной.
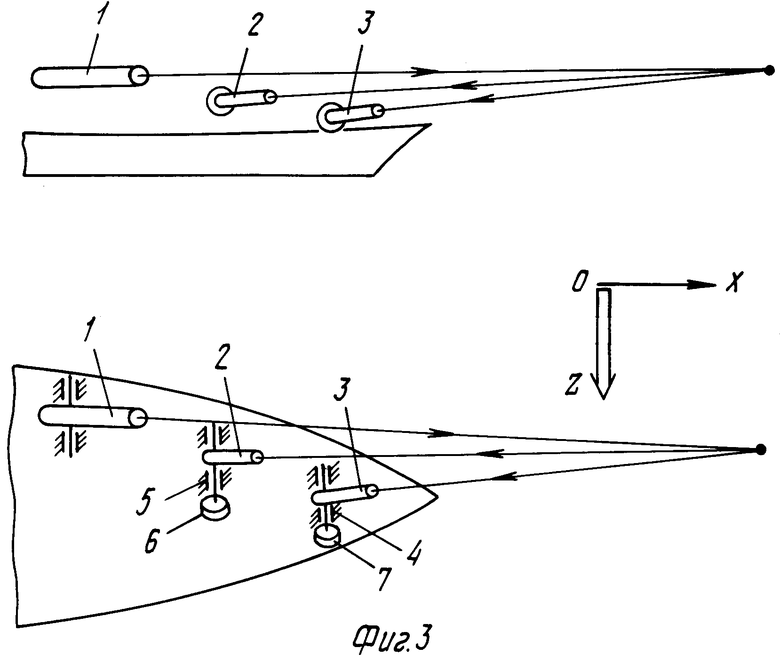
Для измерения деформации корабля, возникающей при изгибах корпуса в диаметральной плоскости вокруг оси OZ, луч лазерного источника 1 направляют также вперед или назад под острым углом к горизонту, как это показано на фиг. 3. Последовательность операций при измерении полностью аналогична описанной.
Дальность обнаружения рассеянного назад лазерного излучения, как это следует, например из [4], даже в условиях ограниченной видимости составляет несколько километров. Это позволяет при малой расходимости лазерного луча достичь достаточно высокой точности определения ориентации луча и, следовательно, измерения угловых деформаций объекта.
Для автоматической ориентации оптических приемников 2,3 можно использовать электромеханическое устройство, аналогичное приводу типовой головки, описание которой дано в [5]. Подобное устройство применимо также для стабилизации лазерного источника 1. При этом непосредственно в качестве источника может служить твердотельный импульсный лазер, работающий в ближней инфракрасной области. Для обеспечения "захвата" луча (светящейся области) на удалении от корабля целесообразно ограничить угол поворота оптического приемника в плоскости, проходящей через измерительную ось и точку визирования. Контроль и управление дальностью "захвата" луча легко осуществить, измеряя амплитуду сигнала, снимаемого с оптических приемников.
Автономность функционирования средств, обеспечивающих реализацию предложенного способа, очевидна. Возможность применения способа не зависит от места нахождения корабля.
Предложенный способ может быть использован для определения деформации любого наземного или надводного транспортного средства, а также летательного аппарата, совершающего полет в атмосфере.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической юстировки двухзеркальной телескопической системы с заданным направлением выходного излучения относительно направления визирования | 2023 |
|
RU2820599C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1996 |
|
RU2124462C1 |
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2486112C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА С ПОДВИЖНОГО НАБЛЮДАТЕЛЯ | 1998 |
|
RU2155933C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА С ПОДВИЖНОГО НАБЛЮДАТЕЛЯ | 1995 |
|
RU2104486C1 |
| МНОГОКАНАЛЬНОЕ ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО КОРАБЕЛЬНОГО ЗЕНИТНОГО КОМПЛЕКСА ДЛЯ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ И НАДВОДНЫХ ЦЕЛЕЙ (ВАРИАНТЫ) | 2008 |
|
RU2406056C2 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2008 |
|
RU2369997C1 |
| СПОСОБ СЕЛЕКЦИИ КОСМИЧЕСКИХ ОБЪЕКТОВ | 1995 |
|
RU2090469C1 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ ЛАЗЕРНЫХ СИСТЕМ ПОИСКА ПОГРУЖЕННЫХ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388013C2 |
Изобретение относится к способам измерения угловых деформаций протяженного объекта, например надводного транспортного средства. Определяют углы отклонения элементов конструкции относительно опорного направления, используя в качестве опорного направления излучение лазерного источника, направленное от объекта, визируют области рассеянного назад лазерного излучения, определяют углы отклонения разнесенных элементов конструкции относительно опорного направления и сравнивают измеренные углы, по которым определяют величину деформации объекта. Способ позволяет улучшить качество управления специальным оборудованием, размещенным на корабле, повысить эффективность использования корабельных систем, измерить деформации корпуса корабля или угловое рассогласование конструктивных элементов, например базовых площадок, находящихся на удалении одна от другой. 3 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ ПРОТЯЖЕННОГО ОБЪЕКТА, основанный на измерении отклонений элементов конструкции объекта относительно реперной оси, задаваемой лазерным лучом, отличающийся тем, что с помощью подсветки атмосферы лазерным излучением формируют светящуюся область, визируют положение светящейся области относительно элементов деформируемых конструкций объекта, например, с помощью оптических приемников, связанных с элементами, измеряют направления визирования и по результатам измерений судят о деформации объекта.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Вагнер Е.Т., Митрофанов А.А | |||
| и Барков В.Н | |||
| Лазерные и оптические методы контроля в самолетостроении | |||
| М.: Машиностроение, 1977, с.96-101. | |||
