Изобретение относится к контрольно-измерительной технике, а именно к оптико-электронным устройствам для бесконтактного измерения и деформаций поверхностей большой площади или протяженности, и может быть использовано для контроля неплоскостности, непараллельности крупногабаритных конструкций в машиностроении, строительстве (например, фундаментов тяжелых или крупногабаритных конструкций, таких как станки, турбоустановки и прочее) в процессе эксплуатации.
Из существующего уровня техники известен способ определения пространственного положения объекта и устройство для его осуществления (патент РФ №2492420, МПК G01B 11/00, G01S 5/16, дата приоритета 18.08.2011, опубл. 10.09.2013), которое содержит активные контрольные метки, жестко закрепленные в контролируемых точках объекта, каждая из которых содержит не менее одного точечного излучателя и оптически сопряжена с фотоприемным устройством, состоящим из оптической системы, в фокальной плоскости которой расположен фотоприемник, на каждый пространственный элемент которого нанесен светофильтр одного из по крайней мере двух различных спектральных диапазонов. Недостатком рассмотренного устройства является необходимость привязки приборной системы координат к внешней системе координат с помощью опорных меток, что делает данное устройство зависимым от внешних воздействий и вибраций, случайным образом смещающих прибор относительно эталонных точек с известными координатами.
Наиболее близким к заявленному техническому решению является устройство для контроля деформаций протяженного объекта (патент РФ №2445572, МПК G01B 11/16, G01B 21/32, дата приоритета 09.11.2010, опубл. 20.03.2012), принятое за прототип. Устройство состоит из задатчика базового направления, визирных целей, выполненных в виде излучателей, устройств управления излучателем, соединенных с блоком предобработки, устройства сопряжения блоков и блока обработки. Блок обработки соединен с задатчиком базового направления через последовательно подключенные блок предобработки и устройство сопряжения блоков. Координатный приемник оптического излучения, размещенный в задатчике базового направления, оптически сопряжен через призменный блок с размещаемыми в контролируемых точках объекта в пределах поля зрения объектива в соответствующих оптических каналах, образованных этим призменным блоком, визирными целями. Каждая визирная цель размещается по периметру объекта, причем их количество не менее количества точек, определяющих геометрическую форму объекта. Основным недостатком данного устройства является наличие лишь одного задатчика базового направления, что обеспечивает контроль деформаций объектов лишь в одном направлении, при этом контроль деформаций крупногабаритных конструкций в обоих направлениях невозможен.
Решается задача повышения точности измерения деформаций плоских конструкций большой площади.
Сущность заключается в том, что устройство для контроля деформаций поверхности конструкций и сооружений большой площади, содержащее базовый блок, визирные цели, выполненные в виде излучателей, оптически сопряженные с базовым блоком через оптическую систему и устанавливаемые по периметру объекта, причем количество визирных целей не менее количества точек, однозначно задающих форму объекта, приемник оптического излучения, связанный с ним блок питания и управления приемником оптического излучения, устройство сопряжения блоков, связанное с блоком питания и управления приемником оптического излучения и вычислительным устройством, отличается тем, что оно содержит по меньше мере один дополнительный базовый блок, расположенный на контролируемой поверхности симметрично относительно первого базового блока, при этом визирные цели выполнены в виде набора реперных меток и опорных меток, которые оптически сопряжены с дополнительным базовым блоком через оптическую систему и расположены в центре поля зрения оптической системы каждого из базовых блоков.
Решение поставленной задачи повышения точности измерений измерения деформаций плоских конструкций большой площади достигается за счет того, что в заявляемом устройстве все реперные и опорные метки, а также базовые блоки располагаются на поверхности контролируемого объекта, причем базовые блоки и опорные метки образуют собственную систему координат, избавляя от необходимости привязки к внешней системе координат и тем самым, делая устройство инвариантным и независимым от вибраций, внешних воздействий и перемещения контролируемого объекта. Вычислительное устройство может быть выполнено на основе микросхемы программируемой логики, что повышает быстродействие блока обработки и позволяет обработать больше изображений реперных и опорных меток за фиксированное время, чем в случае использования других распространенных вычислительных устройств. Это позволяет фиксировать малые деформации конструкций и тем самым повышает точность измерений. Каждая из визирных целей может быть выполнена в виде источника излучения инфракрасного диапазона, что исключает отвлекающее или негативное влияние на оператора.
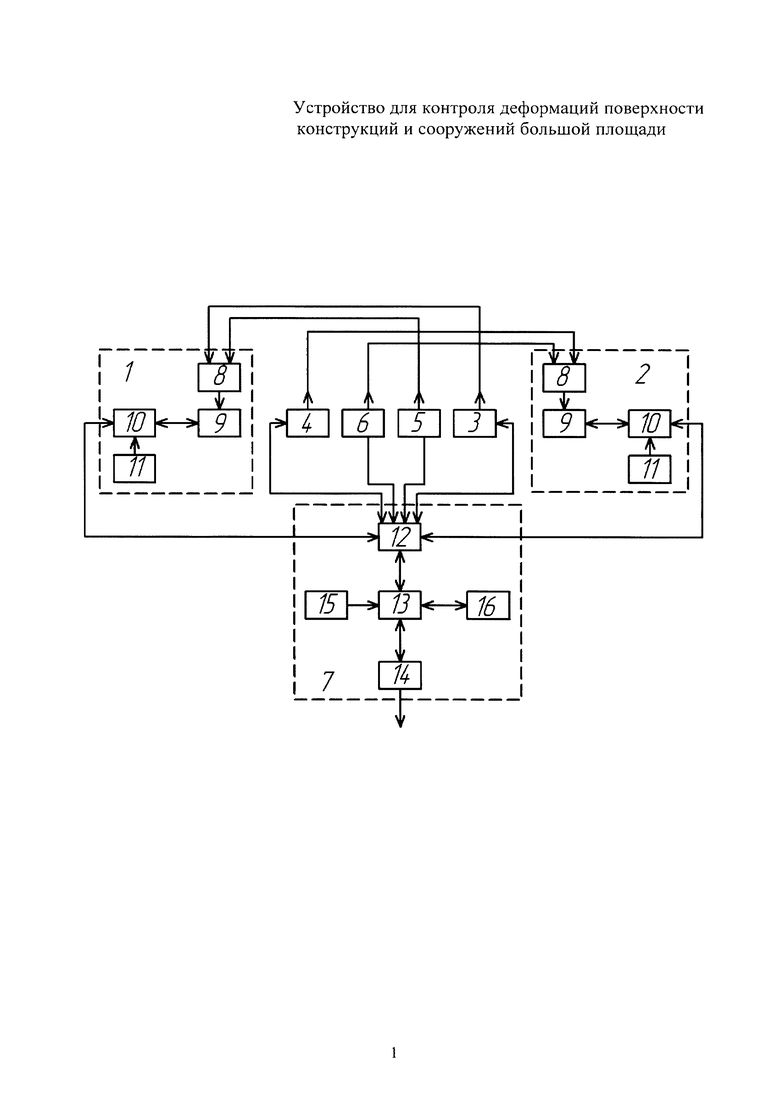
Сущность изобретения поясняется чертежом, где изображена структурная схема устройства для автоматизированного контроля деформаций плоских конструкций большой площади.
Устройство содержит по меньшей мере два базовых блока (ББ) 1 и ББ 2, два набора реперных меток (РМ) 3 и РМ 4 (для каждого ББ соответственно), количество которых не менее количества точек конструкции, подверженных деформациям, по меньшей мере две опорные метки (ОМ) 5 и ОМ 6 (для каждого ББ соответственно) и блок обработки (БО) 7. Каждая из РМ и ОМ оптически сопряжена с оптический системой (ОС) соответствующего ББ. Каждый из ББ содержит ОС 8, в фокальной плоскости которой расположен приемник оптического излучения (ПОИ) 9, вход которого подключен к блоку питания и управления приемником оптического излучения (БПП) 10, а вход БПП 10 соединен с выходом температурного датчика (ТД) 11. БО 7 содержит последовательно соединенные устройство сопряжения блоков (УСБ) 12, вычислительное устройство (ВУ) 13, устройство передачи информации (УПИ) 14, а также блок питания (БП) 15 и оперативное запоминающее устройство (ОЗУ) 16. К входам УСБ 12, выполняющего функции сопряжения и согласования сигнальных уровней всех функциональных узлов системы с ВУ 13, подключены выходы каждой из РМ 3, РМ 4 и ОМ 5, ОМ 6, а также выход БПП 10. Входы ВУ 13, осуществляющего нахождение координат РМ 3 и 4 и ОМ 5 и 6, подключены к УСБ 12, УПИ 14, ОЗУ 16, а также к БП 15. Выход УПИ 14 предназначен для подключения к внешнему устройству, например к устройству индикации или вычислительному устройству, осуществляющему обработку информации о состоянии контролируемой конструкции.
Устройство для контроля деформаций поверхности конструкций и сооружений большой площади работает следующим образом.
ББ 1 и ББ 2 расположены на контролируемой поверхности симметрично относительно друг друга, причем количество ББ не менее двух. РМ 3 и РМ 4, выполненные в виде излучателей, устанавливаются на поверхности контролируемой конструкции по ее периметру, причем количество РМ не менее количества точек конструкции, подверженных деформациям и не может быть меньше одной для каждого из ББ 1 и ББ 2. В центре контролируемой поверхности располагаются ОМ 5 и ОМ 6, предназначенные для предотвращения оседания центральной части контролируемой поверхности. Количество ОМ выбирается равным количеству ББ. Каждая из РМ и ОМ оптически сопряжена с ОС 8 соответствующего ББ, которая фиксирует ее в пределах своего поля зрения.
Излучение РМ 3 и РМ 4 и ОМ 5 и ОМ 6, проходя через ОС 8 соответствующего ББ, формирует распределение облученности на поверхности расположенного в ее фокальной плоскости ПОИ 9. По сигналу от ВУ 13 соответствующие ПОИ 9 фиксируют сформированное распределение облученности. Цикл работы устройства включает два этапа захвата изображения. На первом этапе ББ 1 и ББ 2 получают команду, по которой производится захват изображения в момент, когда излучатели каждой из РМ 3 и РМ 4 и ОМ 5 и ОМ 6 выключены. Таким образом, изображение, зафиксированное ПОИ 9 на первом этапе, содержит только информацию о фоновой облученности. На втором этапе ВУ 13 производит поочередное включение излучателей каждой из РМ 3 и РМ 4. Таким образом, изображения, зафиксированные ПОИ 9 на втором этапе, содержат помимо той же информации о фоновой облученности, также и информацию об облученности, создаваемой каждой из РМ 3 и РМ 4. Зафиксированные изображения сохраняются в ОЗУ 16. Для контроля оседания центра контролируемой поверхности после опроса каждой из РМ 3 и РМ 4 ВУ 13 производит последовательное включение ОМ 5 и ОМ 6, а соответствующие ПОИ 9 выполняют захват изображений, содержащих информацию о создаваемой ими облученности. Зафиксированные оптические сигналы приводятся к цифровому виду, передаются под управлением БПП 10 на ВУ 13 и затем в виде изображения сохраняются в ОЗУ 16. Включение и выключение РМ 3 и РМ 4 и ОМ 5 и ОМ 6 производится УСБ 12 по команде от ВУ 13. Наличие связи между ВУ 13 и УСБ 12 позволяет настраивать яркость излучателей РМ 3 и РМ 4 и ОМ 5 и ОМ 6, тем самым регулируя их видимость на фоне окружающей обстановки. По завершении двух этапов захвата изображений ВУ 13 производит их обработку по алгоритму типа «межкадровая разность» и последующее вычисление координат каждой из РМ 3 и РМ 4 и ОМ 5 и ОМ 6 в системе координат ПОИ 9 методом взвешенного суммирования. Полученные координаты в системе координат ПОИ 9 затем пересчитываются к величинам смещения РМ 3 и РМ 4 и ОМ 5 и ОМ 6 относительно эталонного значения. За эталонное значение, относительно которого измеряются величины смещения РМ 3 и РМ 4 и ОМ 5 и ОМ 6, принимается значение, измеренное в условиях минимальных механических напряжений контролируемой конструкции, например до начала процесса ее эксплуатации. В случае если величина смещения координат одной или нескольких РМ 3 и РМ 4 и ОМ 5 и ОМ 6 превышает заданную пороговую величину, выносится предупреждение о деформации контролируемой поверхности в данных точках. Текущее положение РМ 3 и РМ 4 и ОМ 5 и ОМ 6 отслеживают в реальном масштабе времени, что позволяет оперативно исправить недостаток несущей конструкции и устранить деформацию. ТД 11 служит для контроля температуры внутри соответствующего ББ. При снижении температуры ниже установленного порового значения производится обогрев электроники. УПИ 14 служит для передачи полученных результатов внешнему управляющему устройству для дальнейшей обработки или отображения.
Пример конкретного исполнения
Излучатели РМ реперных и ОМ выполнены в виде полупроводниковых излучающих диодов (ПИД) инфракрасного диапазона, работающих на длине волны 940 нм. Каждая из РМ И ОМ содержит пять ПИД, зафиксированных на плоском корпусе, имеющем необходимые крепления для установки его на контролируемом объекте. В качестве ВУ используются микросхемы на основе программируемых логических интегральных схем (ПЛИС). УСБ 13 выполнено в виде печатной платы, с расположенными на ней компонентами схемного решения преобразования и сопряжения интерфейсов. Каждый ББ выполнен единым блоком. ОС, ПОИ, БПП собраны в единый корпус и представляют собой телевизионную камеру. ОС представляет собой объектив с фокусным расстоянием 200 мм, а ПОИ - КМОП-матрицу формата 1/4 дюйма с 2592x1944 активных пикселей размером 1,4×1,4 мкм. УПИ выполнено в виде интерфейса RS-485. Выполнение излучателей в виде ПИД инфракрасного диапазона исключает отвлекающее или негативное влияние на оператора. Использование пяти излучателей повышает точность обнаружения РМ и ОМ на случайном фоне. Использование ПЛИС в качестве ВУ 13 обеспечивает высокое быстродействие устройства, тем самым позволяя фиксировать малые смещения РМ и ОМ.
Таким образом, заявляемая совокупность признаков обеспечивает повышение точности при контроле деформаций поверхности плоских конструкций большой площади.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДЕФОРМАЦИЙ ПРОТЯЖЕННОГО ОБЪЕКТА | 2010 |
|
RU2445572C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2387561C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2424932C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2492420C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| ОПТИЧЕСКИЙ ПРОГИБОМЕР | 1995 |
|
RU2095755C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ, ПРИЦЕЛИВАНИЯ И ИНДИКАЦИИ | 2007 |
|
RU2321813C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2468383C1 |
Изобретение относится к контрольно-измерительной технике, а именно к оптико-электронным устройствам для бесконтактного измерения и деформаций поверхностей большой площади или протяженности, и может быть использовано для контроля неплоскостности, непараллельности крупногабаритных конструкций в машиностроении, строительстве. Устройство для контроля деформаций поверхности конструкций и сооружений большой площади содержит содержащее базовый блок, визирные цели, выполненные в виде излучателей, оптически сопряженные с базовым блоком через оптическую систему и установленные по периметру объекта, причем количество визирных целей не менее количества точек, однозначно задающих форму объекта, приемник оптического излучения, связанный с ним блок питания и управления приемником оптического излучения, устройство сопряжения блоков, связанное с блоком питания и управления приемником оптического излучения и вычислительным устройством. При этом устройство содержит по меньше мере один дополнительный базовый блок, расположенный на контролируемой поверхности симметрично относительно первого базового блока, при этом визирные цели выполнены в виде набора реперных меток и опорных меток, которые оптически сопряжены с дополнительным базовым блоком через оптическую систему и расположены в центре поля зрения оптической системы каждого из базовых блоков. Технический результат заключается в повышении точности измерения деформаций плоских конструкций большой площади. 2 з.п. ф-лы, 1 ил.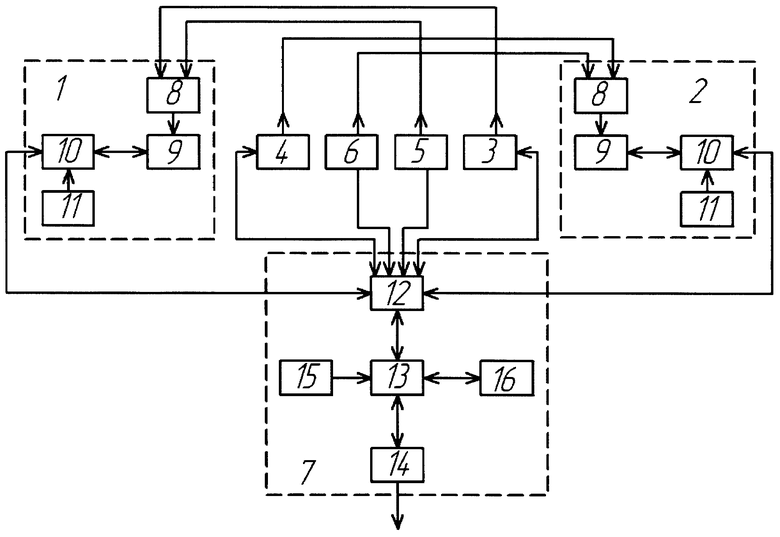
1. Устройство для контроля деформаций поверхности конструкций и сооружений большой площади, содержащее базовый блок, визирные цели, выполненные в виде излучателей, оптически сопряженные с базовым блоком через оптическую систему и установленные по периметру объекта, причем количество визирных целей не менее количества точек, однозначно задающих форму объекта, приемник оптического излучения, связанный с ним блок питания и управления приемником оптического излучения, устройство сопряжения блоков, связанное с блоком питания и управления приемником оптического излучения и вычислительным устройством, отличающееся тем, что оно содержит по меньше мере один дополнительный базовый блок, расположенный на контролируемой поверхности симметрично относительно первого базового блока, при этом визирные цели выполнены в виде набора реперных меток и опорных меток, которые оптически сопряжены с дополнительным базовым блоком через оптическую систему и расположены в центре поля зрения оптической системы каждого из базовых блоков.
2. Устройство по п. 1, отличающееся тем, что вычислительное устройство выполнено на основе микросхемы программируемой логики.
3. Устройство по п. 1, отличающееся тем, что реперные и опорные метки выполнены в виде источника излучения инфракрасного диапазона.
| СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ИНЖЕНЕРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2523751C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ СООРУЖЕНИЯ | 2007 |
|
RU2357205C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЕФОРМАЦИИ КОНСТРУКЦИИ ИЗ КОМПОЗИЦИОННОГО МАТЕРИАЛА | 2009 |
|
RU2427795C1 |
| Способ количественного определения фурадонина | 1990 |
|
SU1719972A1 |

