Изобретение относится к области телевизионно-вычислительной техники и может быть использовано при построении интеллектуальных систем технического зрения для автоматического обнаружения и регистрации параметров движения объектов.
Известен способ обнаружения движения объектов на цифровом изображении, основанный на анализе межкадровой разности (К.Фу, Р.Гонсалес, К.Ли. Робототехника. М.: Мир, 1989 г. с.423-426). Он заключается в определении изменений между двумя кадрами изображения, один из которых, имеющий стационарные компоненты, содержит эталонный объект, и в последующей пороговой обработке полученной разности, в результате которой выделяются пиксели изображения движущегося объекта. По полученному сегментированному изображению можно определить местонахождение и параметры движения объекта. Он предполагает определение движения объекта относительно неподвижного фона при хорошем освещении (низком уровне шума).
Наиболее близким по технической сущности к заявленному способу является определение движения объекта на основе межкадровых разностей частотных характеристик (Богословский А.В., Жигулина И.В., Копылов О.Е., Яковлев В.А. Определение параметров движения объекта по изображению на основе межкадровых разностей частотных характеристик // Радиотехника, 2010, №5). Он заключается в измерении частотных характеристик изображения по строкам и столбцам и дальнейшем определении их разностей. Недостатком данного способа является низкая вероятность автоматического обнаружения движения объекта в случаях высокого уровня шумов, например при низкой освещенности, малых размерах или низком контрасте движущегося объекта.
Техническим результатом предлагаемого способа является повышение эффективности автоматического обнаружения движущихся объектов и определения параметров их движения в условиях низкой освещенности, в том числе малоконтрастных и малоразмерных объектов на сложном неоднородном фоне.
Указанный технический результат достигается тем, что из первого кадра формируются два кадра, в одном из них принудительно обнуляются последние или первые пиксели в строках и столбцах, другой кадр формируется из первого без изменений; из второго кадра таким же образом формируются тоже два кадра; разность частотных характеристик определяется для одинаково сформированных кадров, находится разность полученных разностей; определяются экстремальные значения полученных двойных разностей; затем из тех же первого и второго кадров формируются по два новых кадра, но количество обнуленных пикселей увеличено на один в каждой строке и столбце по сравнению с ранее сформированными кадрами; для вновь сформированных кадров также находят экстремальные значения двойных разностей частотных характеристик и сравнивают их с ранее полученными; эти действия повторяют до тех пор, пока не будут определены наибольшее и наименьшее значения полученных двойных разностей, по ним определяют движущийся объект.
Сущность предлагаемого способа заключается в следующем:
в обнаружении движущихся объектов по видеопоследовательности при помощи двойных разностей частотных характеристик, определенных из соответствующих разностей двух кадров изображения, взятых с последовательным увеличением количества обнуленных пикселей на один.
Способ может быть реализован следующей последовательностью действий:
- в базу данных (память) вводится два кадра видеопоследовательности, происходит выборка по строкам и столбцам (см. Андреев А.Л. Автоматизированные телевизионные системы наблюдения. Часть 1 / СПб.: СПбГУИТМО, 2005, с.14-17);
- из первого и второго кадра формируются кадры с обнуленными пикселями яркости, на первом шаге обнуляется по одному пикселю;
- далее измеряются частотные характеристики для первого и второго кадра без обнуления (Богословский А.В., Жигулина И.В. Использование фазочастотных пространственных характеристик для оценки движения // Успехи современной радиоэлектроники, 2009, №11);
- измеряются частотные характеристики для первого и второго кадра с обнулением;
- определяется разность частотных характеристик для первого и второго кадра без обнуления;
- определяется разность частотных характеристик для первого и второго кадра с обнулением;
- определяется разность двух определенных разностей частотных характеристик; и находятся ее экстремальные значения;
- из первого и второго кадров формируются кадры с увеличенным на один пиксель обнулением;
- измеряют частотные характеристики для кадров с обнуленными двумя пикселями;
- определяют разность частотных характеристик для кадров с обнуленными двумя пикселями;
- определяется разность двух определенных разностей частотных характеристик: для кадров с двумя обнуленными пикселями и для кадров с одним обнуленным пикселем; и находятся ее экстремальные значения;
- процедуру последовательного обнуления нахождения разностей частотных характеристик и двойных разностей частотных характеристик повторяют до тех пор, пока не определят из экстремальных полученных значений наибольшее и наименьшее;
- по наибольшему и наименьшему значениям двойной разности определяют местоположение движущегося объекта.
Способ может быть реализован, например, с помощью устройства, структурная схема которого, представлена на фигуре 1, где обозначены:
1 - датчик изображения;
2 - блок памяти;
3-1 - блок выборки по строкам;
3-2 - блок выборки по столбцам;
4-1 - блок памяти по строкам;
4-2 - блок памяти по столбцам;
5-1 - блок обнуления по строкам;
5-2 - блок обнуления по столбцам;
6-1 - блок измерения частотных характеристик с памятью;
6-2 - блок измерения частотных характеристик с памятью;
7-1 - блок алгебраического суммирования по строкам;
7-2 - блок алгебраического суммирования по столбцам;
8-1 - блок накопления и сравнения;
8-2 - блок накопления и сравнения.
Устройство функционирует следующим образом: оптический сигнал, отраженный от сцены, преобразуется в цифровую форму в датчике изображения 1, два последовательных кадра в виде распределении яркости сохраняются в блоке памяти 2, далее осуществляется выборка, из памяти кадров по строкам блоком выборки по строкам 3-1 и по столбцам в блоке выборки по столбцам 3-2, выбранные строки соседних кадров сохраняются в блоке памяти по строкам 4-1, выбранные столбцы соседних кадров сохраняются в блоке памяти 4-2, строки последовательно обнуляются в блоке обнуления строк 5-1, столбцы обнуляются в 5-2 блоке обнуления по столбцам, далее строки подаются в блок измерения частотных характеристик с памятью по строкам 6-1, столбцы подаются в блок измерения частотных характеристик с памятью по столбцам 6-2, где измеряются частотные характеристики для строк и столбцов соответственно, далее в блоке алгебраического суммирования по строкам 7-1 определяются двойные разности частотных характеристик, в блоке 7-2 определяются двойные разности частотных характеристик для столбцов, значения двойных разностей для строк поступают в блок накопления и сравнения 8-1, в котором происходит накопление и определение минимального и максимального значения двойной разности частотных характеристик, по которым определяется наличие движущегося объекта по горизонтали, аналогично, в блоке накопления и сравнения 8-2 для столбцов.
Применение данного способа позволит повысить вероятность правильного обнаружения движения объектов автоматически (системой технического зрения) по последовательности цифровых изображений, обладающих сложным неоднородным фоном в условиях высокого уровня шумов.
Проведенный заявителями анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявлению источников, содержащих сведения об аналогах изобретения, позволил установить, что заявители не обнаружили аналогов, характеризующихся признаками, тождественными всем существенным признакам изобретения.
Следовательно, заявленное изобретение "Способ обнаружения движущихся объектов" соответствует критерию «новизна».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕГМЕНТАЦИИ ИЗОБРАЖЕНИЯ | 2014 |
|
RU2557484C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ ПАРАМЕТРОВ | 2010 |
|
RU2446471C1 |
| СПОСОБ СРАВНЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2673396C1 |
| Способы и устройство сжатия изображений. Способ и устройство восстановления изображений | 2017 |
|
RU2669874C1 |
| Способ помехоустойчивого обнаружения дыма и пламени в сложной фоно-световой обстановке | 2021 |
|
RU2760921C1 |
| СПОСОБ ВИДЕОСОПРОВОЖДЕНИЯ С УЛУЧШЕННЫМИ ДИНАМИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2716005C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРА ДВИЖЕНИЯ ОБЪЕКТА НА КАДРАХ ВИДЕОПОСЛЕДОВАТЕЛЬНОСТИ | 2019 |
|
RU2737343C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ НЕБОЛЬШИХ ИЛИ ТОНКИХ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ (ВАРИАНТЫ) | 2013 |
|
RU2546600C2 |
| УСТРОЙСТВО И СПОСОБ КОДИРОВАНИЯ ВИДЕО | 2019 |
|
RU2806278C2 |
| УСТРОЙСТВО ФИЛЬТРАЦИИ ДИНАМИЧЕСКИХ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ В УСЛОВИЯХ ОГРАНИЧЕННОГО ОБЪЕМА АПРИОРНЫХ ДАННЫХ | 2013 |
|
RU2522043C1 |
Изобретение относится к области телевизионно-вычислительной техники и может быть использовано при построении интеллектуальных систем технического зрения. Техническим результатом является повышение эффективности автоматического обнаружения движущихся объектов и определения параметров их движения в условиях низкой освещенности, в том числе малоконтрастных и малоразмерных объектов на сложном неоднородном фоне. Обнаружение движущихся объектов происходит автоматически без участия оператора-наблюдателя. В способе автоматического обнаружения движущихся объектов формируют кадры видеопоследовательности. Запоминают первый и второй кадр. Затем из первого кадра формируют два кадра, в одном из них принудительно обнуляются последние или первые пиксели в строках и столбцах, другой кадр формируют из первого без изменений. Из второго кадра таким же образом формируют тоже два кадра. Затем определяют разность частотных характеристик для одинаково сформированных кадров. Находят разность полученных разностей и определяют экстремальные значения полученных двойных разностей. Затем из тех же первого и второго кадров формируют по два новых кадра, но количество обнуленных пикселей увеличено на один в каждой строке и столбце. Находят экстремальные значения двойных разностей и сравнивают их с ранее полученными. 1 ил.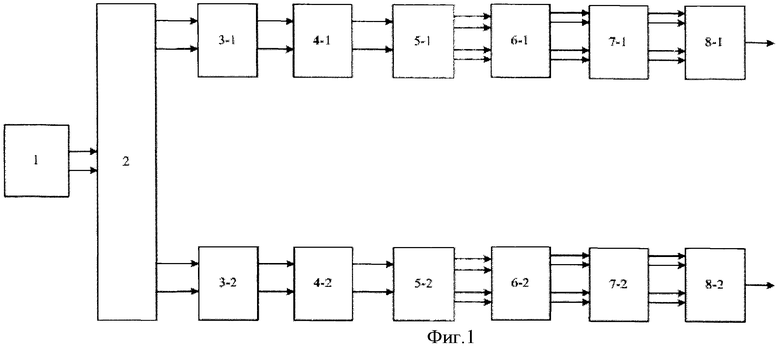
Способ автоматического обнаружения движущихся объектов, основанный на формировании кадров видеопоследовательности, запоминании двух кадров - первого и второго, измерении частотных характеристик кадров, определении их разностей, отличающийся тем, что из первого кадра формируются два кадра, в одном из них принудительно обнуляются последние или первые пиксели в строках и столбцах, другой кадр формируется из первого без изменений; из второго кадра таким же образом формируются тоже два кадра; разность частотных характеристик определяется для одинаково сформированных кадров, находится разность полученных разностей; определяются экстремальные значения полученных двойных разностей; затем из тех же первого и второго кадров формируются по два новых кадра, но количество обнуленных пикселей увеличено на один в каждой строке и столбце по сравнению с ранее сформированными кадрами; для вновь сформированных кадров также находят экстремальные значения двойных разностей частотных характеристик и сравнивают их с ранее полученными; эти действия повторяют до тех пор, пока не будут определены наибольшее и наименьшее значения полученных двойных разностей, по ним определяют движущийся объект.
| СПОСОБ НАХОЖДЕНИЯ ВЕКТОРОВ ДВИЖЕНИЯ ДЕТАЛЕЙ В ДИНАМИЧЕСКИХ ИЗОБРАЖЕНИЯХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2408160C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2008 |
|
RU2395787C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭНЕРГЕТИЧЕСКОГО СПЕКТРА ДВУМЕРНОГО СИГНАЛА | 2008 |
|
RU2370780C1 |
| Механизм подачи нитей основы круглойОСНОВОВязАльНОй МАшиНы | 1978 |
|
SU802426A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

