Изобретение относится к области сегментации изображения, а более конкретно к выделению областей изображений, содержащих движущиеся объекты.
Известен способ анализа межкадровой разности (К. Фу, Р. Гонсалес, К. Ли. Робототехника / М.: Мир, 1989 г., с.423-426). Он заключается в определении изменений между двумя кадрами изображения, один из которых, имеющий стационарные компоненты, содержит эталонный объект, и последующей пороговой обработке полученной разности, в результате которой выделяются пиксели изображения движущегося объекта. По полученному сегментированному изображению можно определить местонахождение и параметры движения объекта.
Недостатками данного способа являются: сложность обнаружения движения объекта и определения параметров его движения в случаях изменения освещенности в пределах границ объекта, высокого уровня шумов, особенно при низкой освещенности, при малых размерах или низком контрасте движущегося объекта.
Известен способ определения движения объекта на основе измерения межкадровых разностей частотных характеристик (Богословский А.В., Жигулина И.В., Копылов О.Е., Яковлев В.А. Определение параметров движения объекта по изображению на основе межкадровых разностей частотных характеристик // Радиотехника, 2010, №5). Он заключается в измерении частотных характеристик изображения по строкам и столбцам и дальнейшем определении их разностей. По полученным разностям возможно обнаружение движения объекта. Он предполагает автоматическое определение движения объекта относительно неподвижного фона при хорошем освещении и высоком уровне контраста движущегося объекта (низком уровне шума).
Недостатком данного способа является низкая вероятность автоматического обнаружения движения объекта в случаях высокого уровня шумов, например при низкой освещенности, малых размерах или низком контрасте движущегося объекта.
Наиболее близким по технической сущности к заявленному способу является «Способ обнаружения движущихся объектов». Патент RU №2461067, 2011, G06T 7/20. Он заключается в измерении частотных характеристик изображения по строкам и столбцам и дальнейшем определении экстремальных значений двойных разностей частотных характеристик и сравнении их с полученными ранее.
Недостатком данного способа является необходимость выполнения большого количества действий, что снижает быстродействие системы в целом.
Сущность предлагаемого способа заключается в следующем:
обнаружение движущихся объектов по видеопоследовательности осуществляется при помощи изменений межкадровых разностей частотных характеристик, возникающих при обнулении одноименных пикселей в двух кадрах видеопоследовательности. Обнуление производится последовательно от краев к центру изображения. Когда обнуленный пиксель попадает на изображение объекта в одном из двух кадров, а в другом - на фон, то величины добавок близки к экстремальным значениям. Это может происходить при значениях номеров p фаз, не превышающих величину перемещения объекта в пикселях между кадрами. Поэтому номера обнуленных пикселей позволяют определить края движущегося объекта, т.е. произвести сегментацию изображения.
Техническим результатом предлагаемого способа является повышение быстродействия автоматического обнаружения движущихся объектов и определения параметров их движения за счет учета связности движущего объекта.
Указанный технический результат достигается тем, что для выделения участков изображения, содержащих движущиеся объекты, производят обнуление пикселей с одинаковыми номерами в обоих кадрах последовательно с краев изображения к центру, для каждого обнуленного пикселя измеряют добавку к межкадровой разности частотных характеристик при малых номерах p фаз, определяют номера обнуленных пикселей, при которых добавка по абсолютной величине превышает установленный порог, по значениям этих номеров пикселей выделяют сегмент изображения, содержащий движущийся объект; после этого процесс сегментирования запускают снова для изображения, которое не содержит выделенную область.
Способ может быть реализован следующей последовательностью действий:
- в память записываются два кадра видеопоследовательности, происходит выборка по строкам (столбцам) (см. Андреев А.Л. Автоматизированные телевизионные системы наблюдения. Часть 1 / СПб.: СПбГУИТМО, 2005, с.14-17);
- в строках (столбцах) первого и второго кадров обнуляются пиксели с одинаковыми номерами, обнуление производится последовательно, начиная с краев строк (столбцов) к их центру;
- для каждого обнуления производится измерение добавки к межкадровым частотным разностям при малых значениях номеров p фаз;
- значения добавок запоминаются и сравниваются с положительным и отрицательным порогами;
- определяются номера обнуленных пикселей, при которых значения добавок по абсолютной величине превышают установленные пороги;
- по определенным номерам пикселей сегментируется область изображения, содержащая движущийся объект.
Изобретение поясняется чертежами, где:
Фиг.1 - предлагаемая структурная схема устройства реализации данного способа:
1 - формирователь видеосигнала;
2 - блок памяти;
3 - блок выборки и обнуления;
4 - блок определения добавок;
5 - блок анализа;
6 - блок хранения сегментированного изображения.
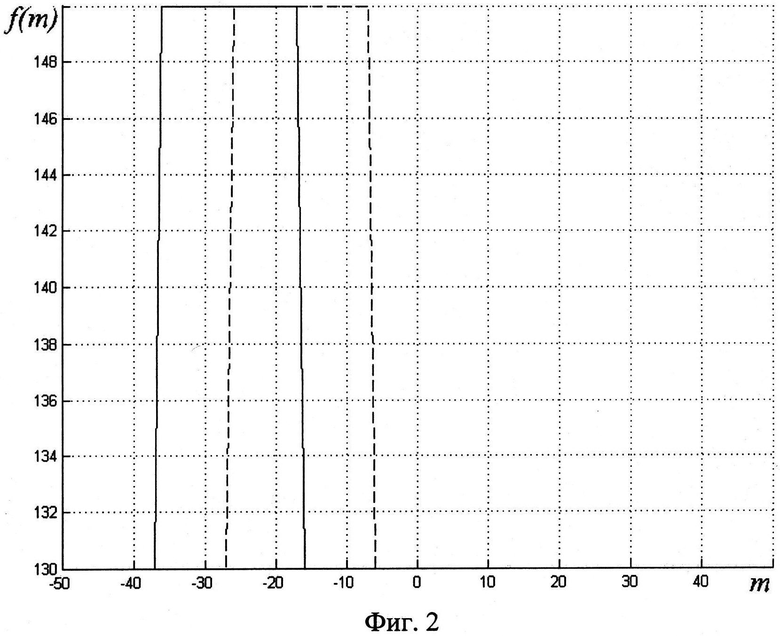
Фиг.2 - видеосигнал одноименных строк тестового изображения двух кадров, содержащих движущийся объект:
- строка содержит 101 пиксель;
- весь динамический диапазон составляет 255 ед.;
- уровень фона a=130 ед.;
- контраст объекта положительный и составляет b-a=20 ед.;
- объект движется вправо и состоит из 20 пикселей;
- левый край объекта в первом кадре соответствует пикселю с номером l=-36, а левый край объекта во втором кадре l+i=-26;
- правый край объекта соответственно r=-17 и r+i=-7.
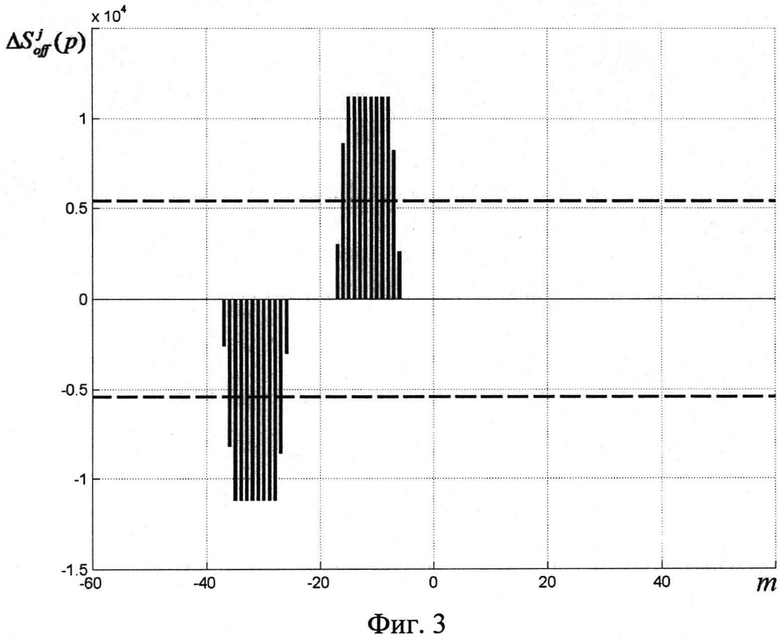
Фиг.3 - вид добавок энергетических межкадровых частотных разностей 
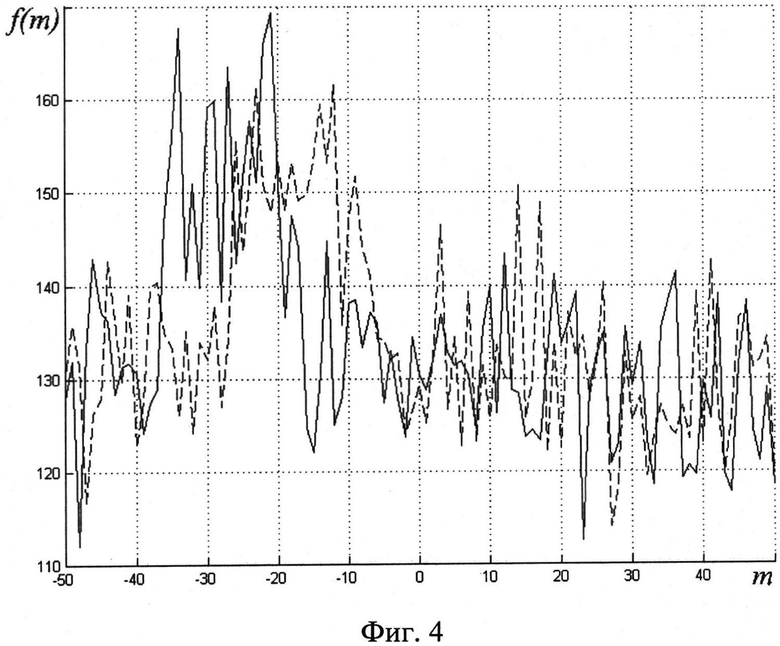
Фиг.4 - видеосигналы, соответствующие фиг.2, искаженные аддитивным Гауссовым шумом с нулевым математическим ожиданием и среднеквадратичным отклонением σ=7.
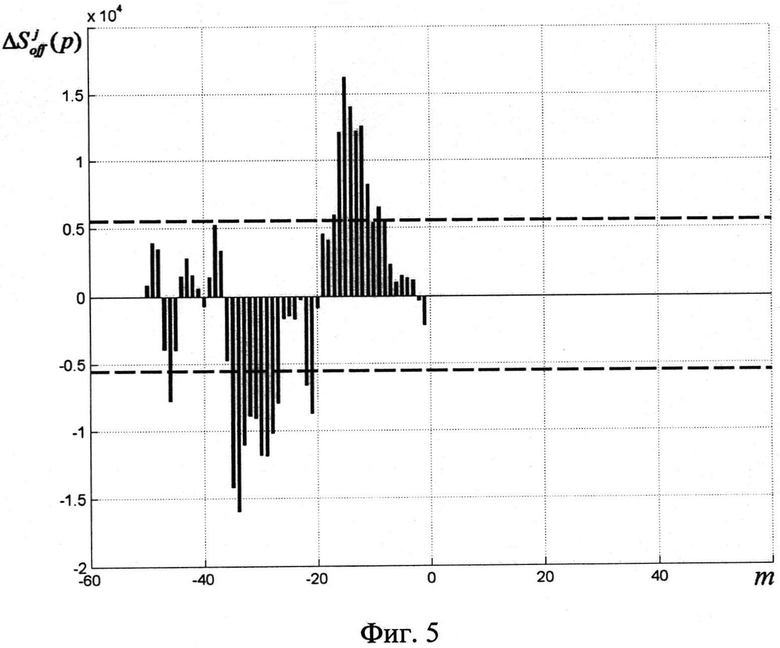
Фиг.5 - вид добавок энергетических межкадровых частотных разностей 
Осуществление изобретения можно проиллюстрировать на примере обработки двух одноименных строк кадров изображения, содержащих движущийся объект. В качестве модели ситуации на фиг.2 показаны соответствующие видеосигналы. При последовательном обнулении одноименных пикселей обеих строк межкадровые разности частотных характеристик приобретают добавки, вид которых показан на фиг.3 для фазы p=1. График содержит две ярко выраженные области:
- отрицательных добавок, они соответствуют номерам обнуленных пикселей от -37 до -26, т.е. от l-1 до l+i;
- положительных добавок для номеров обнуленных пикселей от -17 до -6, т.е. от r до r+i+1.
Экстремальные значения добавок равны ±2Δ(a+b).
При увеличении номера фазы p до (i-1)/2 области, где добавки не равны нулю, будут расширяться, при этом величина экстремальных значений не меняется. При дальнейшем увеличении p экстремальные величины уменьшаются.
При любых перемещениях и знаках контраста ненулевые добавки будут соответствовать отмеченным номерам обнуленных пикселей.
Таким образом, измеряя добавки межкадровых разностей частотных характеристик, можно определять номера пикселей, соответствующие краям движущегося объекта.
В реальности фон является неравномерным, может меняться между кадрами, как и видеосигнал, соответствующий движущемуся объекту, кроме того, возможны искажения шумами. Это вынуждает вводить двусторонний порог и выделять только те добавки, которые по абсолютной величине будут превосходить эти пороги.
На фиг.4 показаны видеосигналы, соответствующие фиг.2, искаженные аддитивным гауссовым шумом с нулевым математическим ожиданием и среднеквадратичным отклонением σ=7. На фиг.5 показаны соответствующие добавки. Величина порога выбрана ±2Δa=±0,26·104. Видно, что даже при достаточно большом уровне шума возможно выделить области, соответствующие движущемуся объекту. Величина порога зависит от области применения и может либо устанавливаться заранее, либо определяться путем усреднения сигнала, соответствующего фону, по предварительно сегментированной области. Если сигнал фона соответствует середине динамического диапазона, то можно рекомендовать в качестве пороговой величины выбрать ±(40÷50)a.
После определения номеров пикселей, соответствующих движущемуся объекту в обоих кадрах, эта область, содержащая движущийся объект, отсекается и процесс сегментации повторяется снова для оставшейся части изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2011 |
|
RU2461067C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ ПАРАМЕТРОВ | 2010 |
|
RU2446471C1 |
| Способ помехоустойчивого обнаружения дыма и пламени в сложной фоно-световой обстановке | 2021 |
|
RU2760921C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСОКОНУСНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2415053C1 |
| Способ компенсации геометрического шума инфракрасных изображений | 2018 |
|
RU2688616C1 |
| Способ измерения скорости движения протяженных объектов | 2023 |
|
RU2803031C1 |
| Способ компенсации геометрического шума в видеопоследовательности инфракрасных изображений, основанный на анализе наблюдаемой сцены | 2020 |
|
RU2744483C1 |
| ТЕЛЕВИЗИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2451419C1 |
| Способ коррекции сигнала датчика изображения слабоконтрастных объектов в системах компьютерной микроскопии при онкологической диагностике | 2018 |
|
RU2712941C1 |
| СПОСОБ СРАВНЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2673396C1 |
Изобретение относится к средствам сегментации изображения. Техническим результатом является повышение быстродействия сегментации. В способе для выделения участков изображения, содержащих движущиеся объекты, производят обнуление пикселей с одинаковыми номерами в обоих кадрах последовательно с краев изображения к центру, для каждого обнуленного пикселя измеряют добавку к межкадровой разности частотных характеристик при малых номерах p фаз, определяют номера обнуленных пикселей, при которых указанная добавка превышает установленный порог, по значениям этих номеров пикселей выделяют сегмент изображения, содержащий движущийся объект. 5 ил.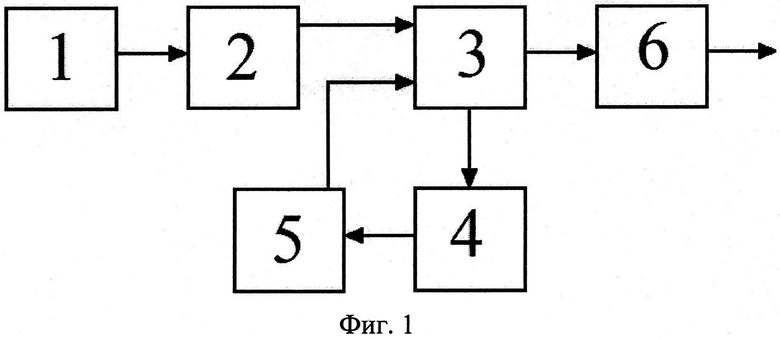
Способ сегментации изображения, основанный на формировании видеосигнала изображения, запоминании последовательности двух кадров, принудительном обнулении пикселей изображения, измерении межкадровых частотных разностей, полученных после обнуления кадров, отличающийся тем, что для выделения участков изображения, содержащих движущиеся объекты, производят обнуление пикселей с одинаковыми номерами в обоих кадрах последовательно с краев изображения к центру, для каждого обнуленного пикселя измеряют добавку к межкадровой разности частотных характеристик при малых номерах p фаз, определяют номера обнуленных пикселей, при которых добавка по абсолютной величине превышает установленный порог, по значениям этих номеров пикселей выделяют сегмент изображения, содержащий движущийся объект; после этого процесс сегментирования запускают снова для изображения, которое не содержит выделенную область.
| RU 2004121993 A, 20.01.2006 | |||
| RU 2012133594 A, 20.02.2014 | |||
| СПОСОБ И СИСТЕМА ВЫДЕЛЕНИЯ ДАННЫХ ОБ ИЗОБРАЖЕНИИ ОБЪЕКТА ПЕРЕДНЕГО ПЛАНА НА ОСНОВЕ ДАННЫХ О ЦВЕТЕ И ГЛУБИНЕ | 2010 |
|
RU2426172C1 |
| US 5768412 A, 16.06.1998 | |||
| US 7120277 B2, 10.10.2006 | |||
| US 20020186874 A1, 12.12.2002 | |||

