Изобретение относится к области охранной сигнализации, более конкретно к магнитометрическим устройствам (средствам, извещателям) обнаружения объектов, основанным на пассивном способе регистрации изменений магнитного поля, вызванных перемещением объектов обнаружения, и может быть использовано для скрытного сигнализационного блокирования троп и дорог.
Такие магнитометрические устройства формируют объемную зону обнаружения и вырабатывают выходной сигнал тревоги при вторжении в нее объектов обнаружения, имеющих при себе или в своем составе ферромагнитные части или предметы, обладающие остаточной или наведенной намагниченностью (например, инструмент, оружие, листы железа). В магнитометрических устройствах для охранной сигнализации объект обнаруживается по вносимым им изменениям в существующее магнитное поле Земли, контролируемое в зоне обнаружения с помощью магнитного преобразователя, обычно размещенного в грунте.
Магнитометрический преобразователь (МП) располагается так, чтобы обеспечить максимальный сигнал на выходе устройства при изменении магнитного потока, вызываемого объектом обнаружения, который по принципу электромагнитной индукции преобразуется в сигнал напряжения. Для определения направления движения используются, как правило, двухкомпонентные или трехкомпонентные преобразователи. Дифференциальное или градиентометрическое включение преобразователей уменьшает действие мощных «дальних» электромагнитных помех, практически не ослабляя полезные сигналы, вызываемые нарушителем в ближней зоне обнаружения.
Преобразователем может являться:
1) индукционный преобразователь с ферромагнитным сердечником;
2) феррозонд;
3) магнитный преобразователь на основе тонких магнитных пленок.
Сигналы напряжения с МП усиливаются, фильтруются и обрабатываются (дискриминируются) в соответствии с заданным алгоритмом обработки информации, заложенным в устройстве. Если сигналы идентифицируются как полезные, т.е. обусловленные нарушителем, то на выходе устройства формируется сигнал тревоги. Если сигналы идентифицируются как помеховые, сигнал тревоги не вырабатывается. При этом магнитометрическое устройство для охранной сигнализации должно обладать высокой обнаружительной способностью (чувствительностью), чтобы минимизировать вероятность пропуска нарушителя, и высокой помехоустойчивостью, чтобы при воздействии различных помех природного и промышленного происхождения не вырабатывать сигналы ложных тревог.
Существует известный компромисс между обнаружительной способностью и помехоустойчивостью устройств: с повышением чувствительности при прочих равных условиях их помехоустойчивость уменьшается. Увеличение чувствительности необходимо для расширения области применения магнитометрических устройств для охранной сигнализации или увеличения классов обнаруживаемых объектов - нарушителей, полезные сигналы от которых в первом приближении пропорциональны величине дипольного магнитного момента, который интегрально характеризует полезные магнитные свойства нарушителей (массу, намагниченность) [1].
У людей присущий им магнитный момент в среднем на 2…3 порядка меньше, чем у транспорта, поэтому их обнаружение требует увеличения чувствительности устройств обнаружения транспорта в 100 и более раз. Это неминуемо ведет к существенному возрастанию потока ложных тревог, особенно в зоне действия индустриальных электромагнитных помех.
Известно магнитометрическое устройство, предназначенное для обнаружения и определения скорости транспортных средств, а также выдачи звукового и визуального сигналов [2]. В качестве чувствительного элемента используются две пассивные петли, расположенные на определенном расстоянии друг от друга под полотном дороги. При пересечении транспортным средством первой петли в ней возбуждается эдс индукции, которая запускает таймер. Пересечение второй петли транспортным средством останавливает таймер, что позволяет при фиксированном расстоянии между петлями определять скорость перемещения транспортного средства. Алгоритм обработки построен таким образом, что до тех пор, пока не будет возбуждена вторая петля и не будет остановлен таймер, повторное возбуждение первой петли не регистрируется. Превышение допустимой скорости перемещения транспортного средства приводит к активации визуальной и звуковой сигнализации.
Достоинством устройства является его простота, однако устройство обладает и рядом недостатков: невозможность оперативного изменения места размещения средства; высокие требования к конфигурации чувствительных элементов; невысокая чувствительность средства (позволяет обнаруживать только транспортные средства); малая помехоустойчивость ввиду простой, недифференциальной структуры чувствительных элементов (петель).
Известно также магнитометрическое устройство, имеющее в качестве чувствительного элемента пассивные 8-образные петли. Оно предназначено для определения изменения магнитного поля, пронизывающего петли, при перемещении объектов, обладающих магнитными характеристиками [3]. Устройство позволяет определять и показывать перемещение объектов как в обоих направлениях, так и в каком-то определенном. На устройство поступают электрические сигналы с установленных петель по двум каналам, которые имеют различные постоянные времени. Обработка сигналов построена таким образом, чтобы при поступлении сигнала с петли, имеющей большую постоянную времени, он мог задерживаться до поступления сигнала со второй петли, чтобы получить результирующий сигнал, показывающий направление перемещения. 8-образная конфигурация пассивных петель обеспечивает повышение помехоустойчивости устройства в целом. В устройстве используются фильтры верхних частот для отстройки от помех промышленной сети и нижних частот для подавления изменений магнитного поля Земли и шума усилителей.
Такое устройство обладает преимуществами простоты схемной реализации и повышенной помехоустойчивости, однако имеет существенные недостатки: невозможность оперативного изменения расположения чувствительного элемента, не реализована функция определения других информационных признаков объектов обнаружения, например скорости перемещения.
Наиболее близким по технической сущности к заявляемому является магнитометрическое устройство, предназначенное для обнаружения транспортных средств, пересекающих оборудованный рубеж, определения скорости их движения и длины, использующее в качестве обнаружителей систему, состоящую из трех датчиков [4]. Первый и второй датчики расположены на определенном расстоянии друг от друга таким образом, чтобы их оси чувствительности располагались перпендикулярно полотну дороги. Каждый из датчиков обнаруживает объекты по вносимым изменениям в индукцию магнитного поля Земли. Разность времени обнаружения используется для определения скорости перемещения объектов, поскольку расстояние между ними известно. Длина объекта обнаружения определяется исходя из величины скорости и времени воздействия на чувствительные элементы. Направление перемещения определяется исходя из последовательности обнаружения объекта датчиками. Третий датчик, представляющий собой трехосный магнитометр, располагается в непосредственной близости от первого и второго датчиков и измеряет величину магнитного момента объекта обнаружения. Трехосный датчик предназначен для определения факта присутствия объекта обнаружения и определения его магнитного момента.
Такая система магнитометрических преобразователей позволяет определять такие характеристики объектов как направление, скорость и длину, а также классифицировать объекты по величине магнитного момента.
Однако описанное устройство обладает существенными недостатками - высокие требования к установке чувствительных элементов (соблюдение расстояний между датчиками, ориентации датчиков как относительно друг друга, так и относительно объекта обнаружения), а также невозможность оперативного изменения местоположения системы и избыточность системы для определения обнаруживаемых признаков (используется три датчика).
Целью настоящего изобретения является повышение эффективности магнитометрических устройств для охранной сигнализации.
Для достижения поставленной цели решается задача создания мобильного магнитометрического устройства, обладающего функциями определения направления и скорости перемещения объектов обнаружения (ОО) с помощью преобразователя, имеющего простую конструкцию, дифференциальную структуру, доступную технологию изготовления и малую стоимость.
Сущность изобретения поясняется чертежами,
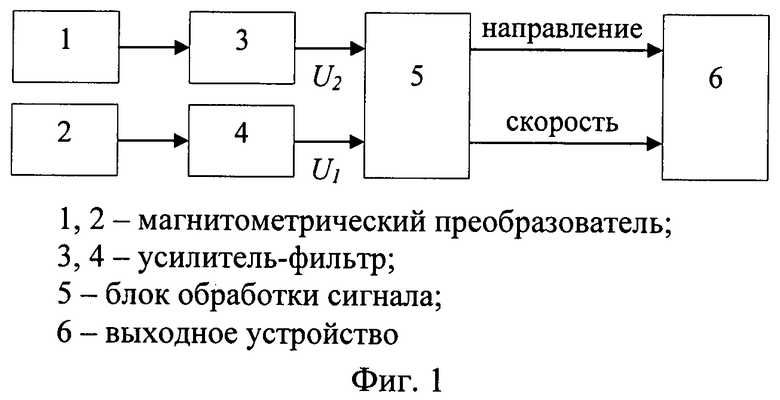
где на фиг.1 изображена структурная схема устройства;
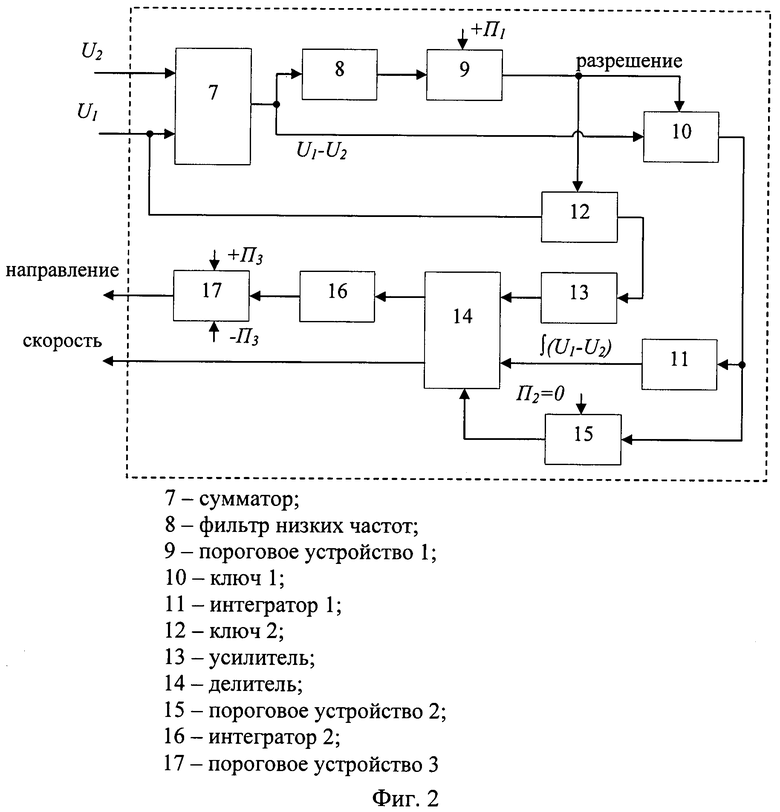
на фиг.2 изображена функциональная схема блока обработки сигналов;
на фиг.3 изображена модель обнаружения диполя дифференциальным магнитным преобразователем;
на фиг.4-5 изображены зависимости ошибки расчета скорости от отношений R/a и угла φ.
на фиг.6 изображен алгоритм обработки сигналов в устройстве.
Устройство состоит из двух идентичных индукционных преобразователей (ИП) 1 и 2, двух усилителей фильтров (УФ) 3 и 4, блока обработки сигналов (БОС) 5 и выходного устройства (ВУ) 6.
Сигналы формируют два точечных ИП, соосно расположенных на расстоянии - базе b - вдоль линии перемещения объекта обнаружения (ось ОХ). Сигналы регистрируются по двум каналам устройства, в каждом канале производятся усиление и фильтрация. Далее сигналы U1 и U2 поступают на БОС (5), где осуществляется обнаружение объекта, определяются направление и скорость перемещения. Эта информация передается на ВУ (6).
Блок обработки сигналов (5) работает следующим образом. Сигналы U1 и U2 поступают на аналоговый сумматор 7 с инверсным входом, таким образом формируется разностный сигнал U1-U2. Этот сигнал поступает на фильтр низких частот (ФНЧ) 8, где выделяется его огибающая.
В случае появления объекта обнаружения, огибающая разностного сигнала увеличивается, становится больше установленного порога П1 1-го порогового устройства (ПУ 1) 9, которое вырабатывает сигнал разрешения обработки информации.
Сигнал разрешения одновременно подается на
1) ключ 10, который пропускает разностный сигнал U1-U2 на интегратор 11;
2) ключ 12, который пропускает сигнал U1 на усилитель 13 с коэффициентом усиления a, численно равным величине базы b.
На выходе делителя 14 начинает формироваться знакопостоянный информационный сигнал, который отражает величину скорости V, положительный или отрицательный в зависимости от направления движения OO, соответственно слева направо или справа-налево.
Время интегрирования tu, в течение которого происходит «усреднение» и интегрирование разностного сигнала, определяется моментом достижения максимума интегрированного сигнала, который приблизительно соответствует точке ближайшего приближения (фиг.3). В этот момент полезные сигналы U1 и U2 равны, а влияние шума минимально. Для этого разностный сигнал подается на пороговое устройство (ПУ 2) 15 с нулевым порогом, на выходе которого в момент tu принимается решение об оценке величины скорости по величине информационного сигнала, которое в наибольшей степени соответствует истинному значению V. Это значение подается на ВУ 6, однако информация о скорости объекта обнаружения выдается только тогда, когда будет принято окончательное решение об обнаружении объекта. Для этого сигнал с выхода делителя 14 подается на интегратор 16 и далее на пороговое устройство (ПУ 3) 17.
ПУ 3 имеет два одинаковых по величине, но противоположных по знаку порога ±П3. Достижение сигналом с выхода интегратора 16 положительного порога инициирует тревогу «объект слева направо», достижение отрицательного порога «объект справа налево». Любой сигнал тревоги сопровождается выдачей информации о скорости перемещения V; при этом на время 2-3 с обнуляются интеграторы 11 и 16, чтобы затем устройство снова было бы готово к работе.
Объект обнаружения представляется в виде магнитного диполя с магнитным моментом М, его перемещение осуществляется на минимальном расстоянии R, характеризуемом точкой ближайшего приближения (ТБП) объекта к преобразователю. При этом высота h0 и скорость V перемещения постоянны. Отклонение от параллельности траектории перемещения объекта и оси ОХ может характеризоваться углом φ. Такая модель принята и соответствует реальной ситуации [5].
Сигнал U(x) с аналогового сумматора 7 с инверсным входом есть разность напряжений U1(x) и U2(x) на выходах преобразователей 1 и 2:

Сигналы U1(x) и U2(x) определяются выражениями:


где k=100·M·µ·S0·N/R3;

где b - расстояние между индукционными преобразователями, м;
М - магнитный момент диполя, Ам2;
α, β - углы, определяющие ориентацию магнитного момента;
γ - угол наклона к поверхности Земли;
N - количество витков в катушке;
µ - относительная магнитная проницаемость сердечника;
S0 - площадь сечения сердечника, м2;
R - минимальное расстояние до диполя, м;
x=X/R - относительная переменная;
X=V·t - текущая координата диполя.
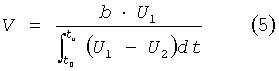
Скорость перемещения OO задается выражением, которое является следствием связи временной и пространственной производных полезного сигнала:

откуда
 ,
,
Ввиду того, что база преобразователя b не равна нулю, возникает ошибка, зависящая от параметров модели.
На фиг.4 показана зависимость ξ1 ошибки расчета скорости от отношения R/b при различных 3610 значениях α, β, γ. Значения углов α и β, определяющих ориентацию магнитного момента OO, варьировались в полном телесном угле с шагом 5° в диапазоне от 0 до 360°, γ - от 0 до 90°. Из зависимости видно, что при соотношении R/b, равном 0…1,5, ошибка расчета скорости очень велика и составляет более 50%. Это связано с тем, что алгоритм расчета скорости движения нарушителя предполагает, что величина b стремится к нулю, что в реальных градиентометрах невозможно.
При движении объекта обнаружения на расстояниях больше чем база градиентометра ошибка уменьшается по экспоненциальному закону.
При базе градиентометра b, равной 0,7 м, из состава комплекса «Радиобарьер-МФ» [6] и перемещении объекта обнаружения на расстоянии R, равном 2 м, от места установки преобразователя максимальная ошибка определения скорости при различных ориентациях магнитного момента ферромагнитной массы составит не более 15%, а при движении на расстоянии R, равном 7 м, - 1,7%.
На фиг.5 показана усредненная по 3610 значениям α, β, γ зависимость ξ2 ошибки расчета скорости от угла δ при фиксированном значении отношения R/b, равном 5. Значения углов α и β варьировались в полном телесном угле с шагом 5° в диапазоне от 0 до 360°, γ - от 0 до 90°.
При перемещении объекта обнаружения под углом ±20° ошибка составляет не более 15%.
В силу дифференциальной структуры устройство практически не чувствительно к «дальним» помехам, степень их подавления определяется балансировкой устройства, которая составляет 0,001-0,005.
Математическая модель сигналообразования в индукционном преобразователе и выражение (5) составляют основу алгоритма обработки сигнала с целью определения направления и скорости движения ОО, который включает последовательное выполнение следующих процедур (фиг.6).
1. Одновременная регистрация сигналов U1 и U2 с обоих плеч дифференциального индукционного преобразователя, их усиление и фильтрация.
2. Получения разностного сигнала (U1-U2).
3. Интегрирование разностного сигнала (U1-U2). Время интегрирования определяется моментом достижения максимума интегрированного сигнала (приблизительно соответствует ТБП).
4. Усиление сигнала U1 на величину α, численно равную величине базы b.
5. Деление усиленного сигнала U1 на интегрированный разностный сигнал 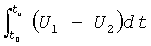 . Полученное значение отражает величину скорости V перемещения OO.
. Полученное значение отражает величину скорости V перемещения OO.
6. Принятие решения о направлении перемещения OO по знаку величины скорости V.
Таким образом, с помощью сосредоточенного дифференциального индукционного преобразователя реализована функция определения направления и скорости движения OO. В отличие от устройств, использующих известные методы определения направления движения, предлагаемое устройство позволяет определять как направление, так и скорость перемещения объектов обнаружения, используя единый чувствительный элемент.
Экспериментальная проверка реальных и рассчитанных значений скоростей различных OO показала, что ошибка определения скорости в пределах угла φ=±10° ориентации МП относительно траектории движения OO составляет не более 20%.
Таким образом, предложенный алгоритм обработки сигналов может использоваться в высокоинформативном магнитометрическом устройстве для охранной сигнализации с определением направления и скорости перемещения объекта обнаружения. При этом возможно использование существующего изделия дифференциального типа без изменения его конструкции, например «РС-М» из состава РСК «Радиобарьер-МФ» [6].
Устройство обладает большей помехоустойчивостью к действию дальних мощных электромагнитных помех и вероятностью обнаружения объектов ввиду дифференциальной структуры.
Магнитометрический преобразователь не предполагает сложной технологии изготовления и трудоемкой установки на местности, имеет низкую стоимость.
Заявляемое устройство вследствие пассивного способа обнаружения не оказывает отрицательного воздействия на состояние окружающей среды.
Список использованной литературы
1. Звежинский С.С., Ларин А.И. Периметровые маскируемые магнитометрические средства обнаружения // Специальная техника. - 2001. - №4.
2. Пат. 3983531 США, МКИ G08G 1/00. Vehicle-responsive signal means / Corrigan (Canada); Northern Traffic&Signal Systems (Canada). - №477656; Заявл. 10.06.74; Опубл. 06.11.1975.
3. Пат. 3745450 США, МКИ G01r 33/00. Metal detection system for indicating the motion and direction of motion of a body having magnetic properties / Wilt (USA); Teledyne Industries, Inc. (USA). - №192822; Заявл. 27.10.1971; Опубл. 10.07.73.
4. Пат. 6208268 США, МКИ G08G 1/01. Vehicle presence, speed and length detecting system and roadway installed detector therefor / Scarzello et al. (USA); The united States of America as represented by the Secretary of the Navy (USA). - № 08/0544166; Заявл. 30.04.93; Опубл. 27.03.2001.
5. Звежинский С.С. Перспективы разработки мобильного магнитометрического средства обнаружения // Современные охранные технологии и средства обеспечения комплексной безопасности объектов: Материалы IV Всерос. науч.-практ. конф. - Пенза: ИИЦ ПГУ, 2002. - С.179-182.
6. www.radiobarier.ru.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2346335C2 |
| СЕЙСМОМАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2210116C2 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2276410C1 |
| ПРОВОДНО-ВОЛНОВОЕ СРЕДСТВО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 1999 |
|
RU2157563C1 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1988 |
|
RU2106692C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И РАСПОЗНАВАНИЯ ЕГО КЛАССА С ПРИМЕНЕНИЕМ СОСРЕДОТОЧЕННЫХ МАГНИТОМЕТРИЧЕСКИХ СРЕДСТВ ОБНАРУЖЕНИЯ | 2020 |
|
RU2741739C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ОПРЕДЕЛЕНИЕМ НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2010 |
|
RU2434296C1 |
| ДОПЛЕРОВСКИЙ РАДИОВОЛНОВОЙ ИЗВЕЩАТЕЛЬ С ИСПОЛНИТЕЛЬНЫМ УСТРОЙСТВОМ ДЛЯ ОХРАННОЙ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2012 |
|
RU2529544C2 |
| ВИБРОМЕТРИЧЕСКОЕ УСТРОЙСТВО ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2006 |
|
RU2319210C1 |
| СПОСОБ ОПЕРАТИВНО-ТЕХНИЧЕСКОЙ ОХРАНЫ РУБЕЖЕЙ ОБЪЕКТОВ И ГРАНИЦ | 2018 |
|
RU2705770C1 |

Изобретение относится к области охранной сигнализации, более конкретно к магнитометрическим устройствам (средствам, извещателям) обнаружения объектов, основанным на пассивном способе регистрации изменений магнитного поля, вызванных перемещением объектов обнаружения, и может быть использовано для скрытного сигнализационного блокирования троп и дорог. Техническим результатом изобретения является реализация магнитометрическим устройством обнаружения на основе преобразователя градиентометрического типа функций определения направления и скорости перемещения объектов. Устройство содержит два канала обнаружения, усиления и фильтрации, блок обработки сигнала, состоящий из сумматора, фильтра, пороговых устройств, ключей, интеграторов, усилителя, делителя, а также выходное устройство. Результат достигается применением в устройстве нового алгоритма обработки сигналов, основанного на взаимосвязи пространственной и временной производных сигнала. 6 ил.
Магнитометрическое устройство для охранной сигнализации, содержащее два соосно расположенных индукционных преобразователя, подключенных к усилителям-фильтрам, блок обработки сигналов и выходное устройство, отличающееся тем, что блок обработки сигналов состоит из сумматора с инверсным входом, на выходе которого формируется разностный сигнал, низкочастотного фильтра и порогового устройства, формирующего сигнал разрешения обработки сигнала, ключей, через которые подаются сигналы со входа блока обработки сигнала через усилитель на первый вход делителя и разностный сигнал через интегратор на второй вход делителя; причем при достижении нулевого уровня разностного сигнала с выхода порогового устройства на управляющий вход делителя подается разрешающий сигнал, а с выходов делителя снимается значение скорости, а также сигнал, который с помощью интегратора и порогового устройства, имеющего одинаковые по величине, но разные по знаку пороги, позволяет определять направление перемещения объекта обнаружения.
| US 6208268 B1, 27.03.2001 | |||
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2276410C1 |
| US 4052595, 04.10.1977 | |||
| СЕЙСМОМАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2001 |
|
RU2210116C2 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2007 |
|
RU2346335C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1993 |
|
RU2092902C1 |
| US 3745450, 10.07.1973 | |||
| US 3983531, 28.09.1976. | |||

