Изобретение касается, в частности, способа и устройства борьбы с помехами в системе связи со скачками по частоте.
В частности, оно применяется для спутниковой связи земля - космос с изменением частот или EVF, когда спутник является геостационарным. Оно может применяться и для других видов связи, не считая спутниковой.
Изобретение находит свое применение в области защиты космический и не космической связи от помех.
В целом изобретение касается связи с изменением частоты.
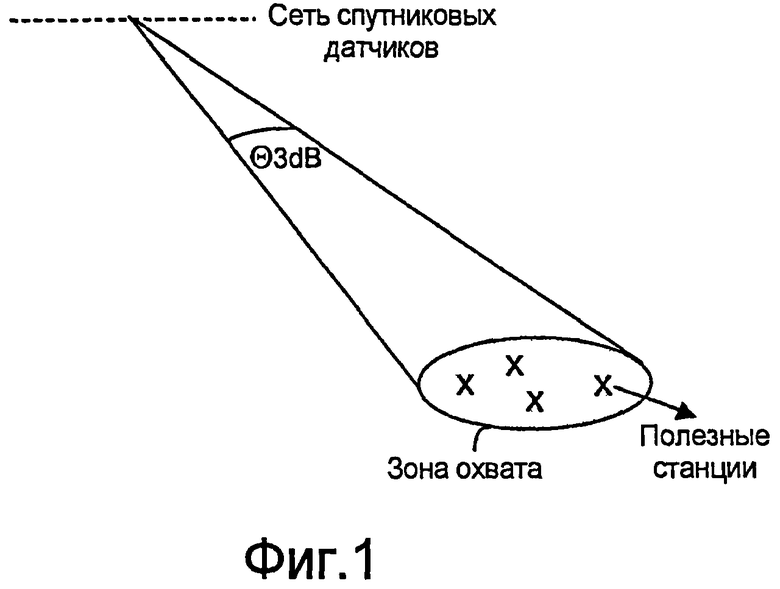
Космическая связь позволяет нескольким наземным станциям сообщаться между собой через спутник, когда эти станции находятся в географической зоне (зоне охвата), ограниченной одним из пятен обзора со спутника, как показано на фиг.1. Наличие помех внутри или за пределами зон охвата может препятствовать связи между станциями. Обеспечение надежности связи в присутствии помех требует защиты связи от этих помех.
Первый вид защиты против помех может быть предусмотрен с применением способа изменения частот (EVF), который состоит в передаче информации на частотах, которые регулярно меняются через каждые Т секунд, где Т обозначает продолжительность ступени установившегося значения сигнала. Правило смены частот, называемое правилом скачков частот, как правило, является периодическим с длинным периодом, что делает его случайным на достаточно короткой шкале наблюдения. Оно известно спутнику и всем задействованным станциям. Оно позволяет связи оставаться только Т секунд на канале с помехами и использовать каналы без помех, если такие существуют.
Будучи достаточно эффективным, этот прием предназначен для ухода от помех, а не для их исключения, и ограничен случаем сильных помех, действующих в очень широком диапазоне и заполняющих большую часть из числа ступеней. Для этих критических ситуаций к EVF, как правило, добавляют системы борьбы с помехами путем антенной обработки.
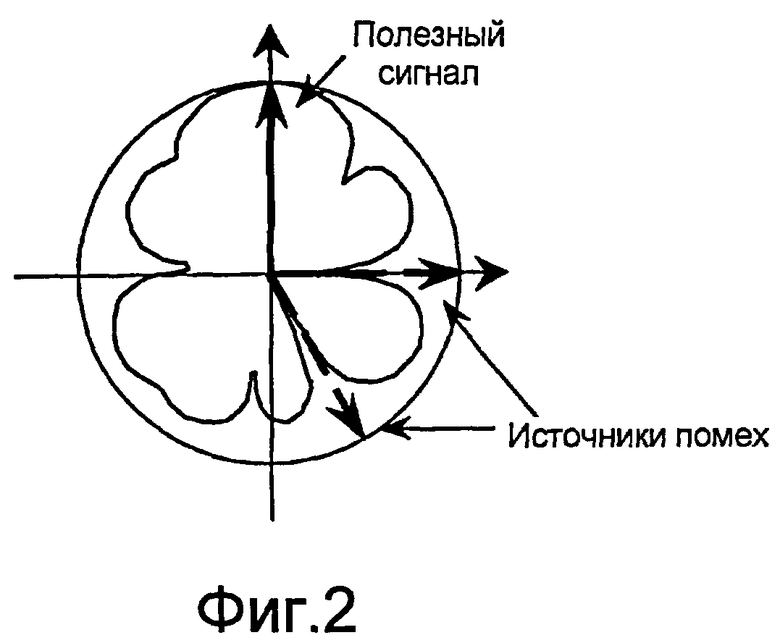
Борьба с помехами путем антенной обработки в настоящее время является эффективным способом защиты одной или нескольких линий космической связи от помех. Борьба с помехами путем антенной обработки состоит в применении антенны, называемой адаптивной на прием, выполненной с возможностью адаптировать в режиме реального времени свою диаграмму излучения к принимаемым сигналам путем ориентации нулевых провалов диаграммы в направлении и на частоте помех, сохраняя достаточный коэффициент направленного действия в направлении защищаемой или защищаемых линий связи, как показано на фиг.2. Этот результат можно получить на основании минимальной информации о защищаемых линиях связи, такой как знание положения задействованных станций, их полосы частот, зоны действия, или на основании циклов отладки, передаваемых станциями, без изначального знания присутствующих помех.
Было разработано некоторое число систем антенной обработки для защиты связи EVF от помех [1] [2]. Однако большинство этих систем применяют наборы весовых обработок сигналов для каждой станции [1], что требует больших затрат или дублирования каналов приема [2].
Изобретение направлено на способ борьбы с помехами в системе связи, где линии связи являются линиями связи со скачками частот, при этом сигнал содержит несколько ступеней, при этом система содержит, по меньшей мере, один главный датчик и один или несколько вспомогательных датчиков, отличающийся тем, что содержит, по меньшей мере, следующие этапы:
- вводят одну или несколько защитных полос между полезными полосами сигнала с изменением частоты, сгруппированных в блоки и подблоки, при этом общую площадь введенных защитных полос выбирают таким образом, чтобы она удовлетворяла значению вероятности перехвата помех (чтобы перехватывать помехи), при этом ступень состоит из нескольких так называемых растянутых блоков (с защитными полосами),
- выбирают сигналы защитных полос с уровнем, превышающим данное пороговое значение,
- определяют вектор весовых обработок борьбы с помехами для каждой ступени сигнала, учитывая матрицу корреляции шума плюс единичный источник помех на сигналах, выбранных в результате определения порогов,
- при помощи вычисленных наборов весовых обработок фильтруют сигналы по основной полосе совокупности полезных блоков и подблоков ступени, чтобы генерировать полезные блоки и подблоки, не содержащие помех.
Изобретение также направлено на систему для борьбы с помехами, присутствующими в системе связи, в которой линии связи являются линиями связи со скачками частот, при этом сигнал содержит несколько ступеней, при этом система содержит, по меньшей мере, один главный датчик Ср и один или несколько вспомогательных датчиков Cl, отличающуюся тем, что содержит в комбинации, по меньшей мере, следующие элементы:
- устройство сужения каждой ступени сигнала до данной центральной частоты,
- цепь преобразования суженных ступеней и вторую цепь для преобразования и оцифровки каждой субполосы суженной ступени,
- устройство преобразования по основной полосе реальных эталонов, имеющихся после первого преобразования,
- устройство вычисления весовых коэффициентов,
- средства для применения весовых коэффициентов.
Решение, предлагаемое настоящим изобретением, имеет следующие преимущества:
- использование при нормальной работе только одного набора весовых обработок для всех станций одной зоны действия,
- решение не требует дублирования каналов приема. Оно использует единичный эталон шума плюс помехи (RBS), построенный путем спектральной дискриминации между полезными полосами и помехами, то есть путем введения защитных полос между полезными полосами. Вычисление весовых обработок производят в этом случае на основании единичных эталонов шума плюс помехи, что позволяет избежать исключения полезных станций,
- система не имеет запоминающего устройства и адаптируется к окружающей среде помех по каждой ступени независимо от одной ступени к другой. Она отличается коротким временем реагирования.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания неограничительного примера выполнения со ссылками на прилагаемые чертежи.
Фиг.1 - вид зоны охвата спутника.
Фиг.2 - диаграмма излучения антенны после исключения источников помех.
Фиг.3 - общая схема системы борьбы с помехами в соответствии с настоящим изобретением.
Фиг.4 - пример вычисления и применения весовых обработок с коротким временем реагирования.
Фиг.5 - схема растянутого блока.
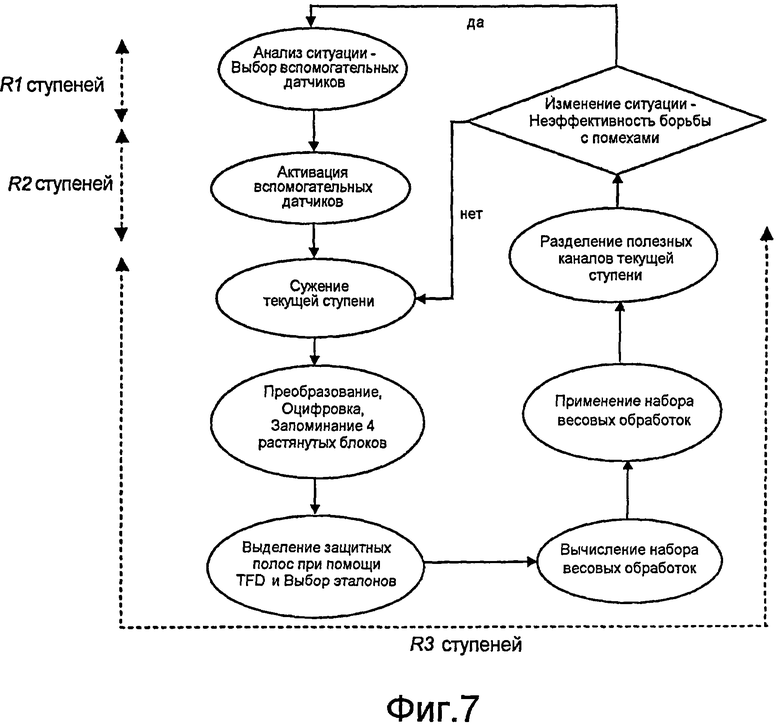
Фиг.7 - схема различных этапов способа в соответствии с настоящим изобретением для борьбы с помехами.
Для лучшего понимания объекта изобретения нижеследующее описание представлено в качестве примера борьбы с помехами путем антенной обработки для спутниковой связи земля - космос с изменением частот, когда спутник является геостационарным, дополненного его применением с земли.
Способ использует данные, которые изначально считаются имеющимися в наличии, о защищаемых зонах охвата, о правиле скачков частот полезных станций, а также об их полосах. Он применяет пространственный фильтр, общий для всех станций, и использует наличие защитных полос между полезными полосами для дискриминации помех полезных сигналов.
Кроме того, он использует характеристики активной антенны, установленной на спутнике, и, в частности, знание положений и реакций излучающих элементов (ER) для каждого направления пространства и для каждой поляризации входящего поля, а также коэффициент усиления и эквивалентные шумовые температуры аналоговых или цифровых цепей приема на выходе датчиков. Эти параметры позволяют вычислять спектральную плотность шума на выходе CAN (аналого-цифрового преобразователя, включенного в цепь 2i, показанную на фиг.3) и участвуют в настройке пороговых значений.
Перед описанием различных этапов способа в соответствии с настоящим изобретением следует напомнить некоторые положения о сигналах.
Сигналы на выходе бортовых датчиков спутника
Рассмотрим сеть из N датчиков, из которых первый датчик, называемый главным, направлен в сторону полезных станций, тогда как N-1 следующих датчиков, называемых вспомогательными, являются либо всенаправленными, либо направлены на источники помех после возможного предварительного этапа характеристики ситуации помех. Каждый из N датчиков, находящихся на борту спутника, принимает в данной полосе приема шириной В вклад от находящихся в зоне действия U полезных источников, от P помех, искажающих связь, и фонового шума. Предполагается, что все сигналы для сети датчиков имеют узкую полосу. При условии всех этих предположений, после сужения наблюдений, оцифровки сигналов на выходе датчиков, калибровки и компенсации каналов приема, вектор x(k) комплексных огибающих сигналов на выходе каналов приема для данной ступени записывают как:

где b(k) является вектором шума на выходе антенны (вклады от внешнего шума и шума цепей приема), jp(t) и Jp соответствуют соответственно комплексной огибающей и вектору направления помехи p, su(t) и Su соответствуют соответственно комплексной огибающей и вектору направления станции u.
Статистические данные 2-го порядка сигналов на выходе цепей оцифровки
Предположив, что сигналы не коррелированы друг с другом, используемые в дальнейшем статистические данные 2-го порядка определяют при помощи усредненной матрицы корреляции наблюдений, отвечающей формуле:

где <.> соответствует операции временного усреднения на бесконечном горизонте наблюдения, πu=<E[|su(k)|2]> является средней мощностью станции u, захватываемой всенаправленным излучающим элементом ER, πp=<E[|jp(k)|2]> является средней мощностью помехи p, захватываемой всенаправленным ER, η2, при которой <E[b(k) b(k)†]>= η2 I является средней мощностью фонового шума датчика, который считается пространственно-белым.
Формулировка задачи
Способ в соответствии с настоящим изобретением основан, в частности, на следующей идее: на основании векторов x(k), наблюдаемых в течение определенного времени, на основании одного набора весовых обработок при нормальной работе исключают помехи, присутствующие в главном канале, защищая при этом полезные станции, причем не используя значительных данных о полезных станциях за пределами их полосы.
На фиг.3 показана общая схема системы борьбы с помехами в соответствии с настоящим изобретением.
Система содержит определенное число вспомогательных датчиков Ci, применяемых для исключения помех, и главный датчик Ср. Датчики связаны с устройством 1i, предназначенным для сужения сигнала с изменением частоты, то есть для приведения каждой из ступеней EVF к данной центральной частоте. После этого сигналы передают в цепь преобразования 2i суженных ступеней на первой промежуточной частоте FI, называемой FI1. Цепь 2i осуществляет также оцифровку и запоминание преобразованных сигналов.
Эталоны, получаемые на выходе цепей оцифровки, передаются на блок обработки 3, содержащий, в частности:
- средства 4, выполненные с возможностью формирования комплексных эталонов в основной полосе, связанных с реальными эталонами, имеющимися в распоряжении на FI,
- средство 7 калибровки-компенсации,
- устройство 5 вычисления набора сложных весовых обработок для борьбы с помехами, соответствующего зоне охвата,
- средства 6 применения вычисленного таким образом набора весовых обработок для полезных эталонов, полученных из N оцифрованных каналов, соответствующих каналам вспомогательных датчиков и каналу главного датчика,
- после этого назначаются обработанные весовой обработкой сигналы 8.
Адаптивные фильтры, показанные на фиг.3, являются фильтрами с одним комплексным коэффициентом на канал. Этих фильтров достаточно для обработки так называемой узкой полосы для сети.
На фиг.4 схематично показан результат применения набора весовых обработок к каждой ступени сигнала со скачком частоты или изменением частоты на основании одного наблюдения текущей ступени.
Защитные полосы, в частности, должны обеспечивать:
- анализ ситуации помех,
- перехват всех помех, мешающих связи,
- вычисление набора весовых обработок, применяемого для наблюдаемых сигналов.
Возможная система анализа помех, работающая на основании вспомогательных датчиков, первоначальной сети, используемой для формирования луча главного датчика или других датчиков (выделенная сеть), предназначена для выполнения следующих функций:
- обнаружение и, в случае необходимости, локализация помех,
- в случае необходимости, определение направлений нацеливания вспомогательных датчиков,
- оптимизация выбора N-1 вспомогательных датчиков для обработки. При отсутствии системы анализа ситуации помех вспомогательные датчики выбираются всенаправленными и в количестве, превышающем или равном максимальному количеству обрабатываемых помех.
Подсистема калибровки-компенсации каналов приема, в частности, предназначена для:
- оценки реакций по дифференциальным частотам цепей приема (калибровка),
- выведения из них импульсных реакций компенсирующих фильтров, предназначенных для компенсации дифференциальных реакций (компенсация).
Система пространственного фильтрования (элементы 5 и 6 на фиг.3), в частности, предназначена для:
- выделения защитных полос из полезных полос,
- вычисления весовой обработки для борьбы с помехами для текущей ступени EVF,
- применение весовой обработки на наблюдаемых сигналах.
Последовательность операций
Применение операций, связанных с системой борьбы с помехами, включает, например, следующие этапы:
- выбор защитных полос, вводимых между полезными полосами,
- выбор вспомогательных датчиков на основании возможной характеристики ситуации помех,
- калибровка и компенсация каналов приема,
- для каждой ступени сигнала:
- сужение ступени за каждым датчиком,
- преобразование в суженные ступени на первой промежуточной частоте FI1 после каждого датчика,
- преобразование в суженные ступени на второй промежуточной частоте FI2 после каждого датчика и оцифровка суженной ступени для каждой из субполос,
- аналоговое фильтрование вокруг общей полосы растянутой ступени для каждого датчика (растянутая ступень представляет собой ступень, в которую ввели защитные полосы),
- оцифровка растянутых блоков ступени для каждого датчика, которую можно осуществлять, например, в двух факультативных вариантах:
- факультативный вариант 1:
- оцифровка общей полосы,
- цифровое фильтрование растянутых блоков,
- факультативный вариант 2:
- аналоговое фильтрование растянутых блоков,
- оцифровка каждого из растянутых блоков (последовательно или параллельно),
- запоминание совокупности имеющихся эталонов ступени,
- для каждого растянутого блока (блок, растянутый защитной полосой) и каждого датчика:
- формирование соответствующих эталонов по основной полосе,
- при помощи дискретного преобразования Фурье (FFT) выделение полезных субполос и защитных субполос рассматриваемого растянутого блока,
- выбор частотных эталонов растянутого блока, которые предположительно искажены помехами,
- выбор векторов зашумленных частотных эталонов (связанных с совокупностью датчиков) защитных полос совокупности растянутых блоков ступени,
- вычисление набора весовых обработок на основании выбранных векторов эталонов. Это вычисление использует, например, решение типа OLS-RBS, отвечающее требованию повышения надежности, целью которого является избежать режекции слабых помех внутри зоны охвата,
- при помощи вычисленного набора весовых обработок - пространственное фильтрование векторных эталонов по основной полосе совокупности растянутых блоков ступени. Таким образом, генерируют все растянутые блоки, не содержащие помех. После этого при помощи частотного демультиплексора выделяют вклады каждой станции внутри растянутых блоков.
Выбор защитных полос
Как было указано выше, идея изобретения основана, в частности, на использовании защитных полос или полос анализа, соответствующим образом введенных между полезными полосами или полосами станций таким образом, чтобы вычислить набор весовых обработок пространственного фильтрования на основании наблюдений, связанных с этими защитными полосами.
В целом, площадь защитных полос, вводимых в сигнал, определяют, например, таким образом, чтобы гарантировать определенную степень в процентном выражении перехвата мешающих помех (тех, которые искажают связь).
Например, защитные полосы формируют таким образом, чтобы гарантировать вероятность перехвата мешающих помех в РВmax% случаев, если форма волны допускает (100-PBmax)% зашумленных ступеней.
Одним из решений для достижения результата для данной ступени, например, является:
- спектральное группирование полезных сигналов в Pu1 блоков эквивалентной полосы Bu1, которые, в свою очередь, могут состоять из Pu2 подблоков полосы Bu2(Bu1 = Pu2 x Bu2), которая соответствует пропускной способности, ниже которой возникает необходимость в борьбе с помехами путем антенной обработки,
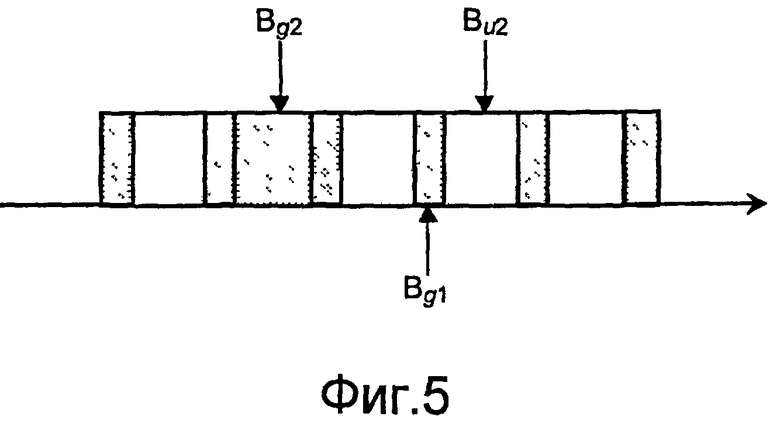
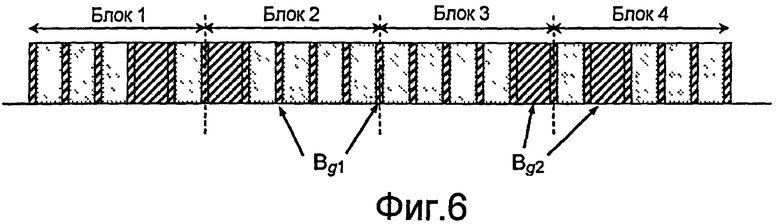
- спектральное введение защитной полосы Bg1 между каждым полезным подблоком Pu2 и в начале и в конце ступени,
- кроме защитных полос Bg1 и для каждого полезного блока полосы Bu1, спектральное введение одного или нескольких защитных блоков полосы Bg2, имеющей ширину, слегка превышающую Bu2, соответствующим образом между полезными подблоками (подблоками полосы Bg2) с отличающимся положением полезного блока Bg1 от другого (полезный блок Pu1 эквивалентной полосы Bu1), таким образом, чтобы надежно перехватывать мешающие помехи, в частности, со спектральными линиями. Полезный блок с его защитными полосами называют растянутым блоком,
- осуществление соответствующих действий таким образом, чтобы Pu1 растянутых блоков одной ступени были смежными, то есть с нулевым пространством между ними. Кроме того, две защитные полосы на каждом конце каждого растянутого блока являются общими для соседних растянутых блоков.
Такая стратегия введения защитных полос показана на фиг.5 и 6. На фиг.5 показана схема решения для растянутого блока, где Bg1 = 0,37% Bu2 и Bg2 = 1,26% Bu2. На фиг.6 показаны относительные конфигурации растянутых блоков на Pu1 = 4 последовательных растянутых блоков.
Однако эта стратегия предусматривает увеличение оцифровываемой полосы для пятна охвата на коэффициент, связанный с параметризацией RBS по защитным полосам. Этими параметрами являются:
- полоса полезного блока и, следовательно, число полезных блоков в ступени,
- полоса и число защитных блоков Bg1,
- полоса и число защитных блоков Bg2.
Эти параметры определяют таким образом, чтобы получить гарантированный перехват источников помех в РВmax% случаев. Кроме того, поскольку эта структура является постоянной для каждой ступени, она позволяет предусматривать детерминированный мультиплексор/демультиплексор формы волны от одной ступени к другой.
Вспомогательные датчики выбирают, например, следующим образом:
- их число должно превышать или быть равным числу исключаемых помех для рассматриваемой ступени,
- для каждой из присутствующих помех, по меньшей мере один из датчиков имеет реакцию по амплитуде, превышающую реакцию главного датчика в его направлении.
Минимальное количество обрабатываемых помех должно, таким образом, быть известно или определено заранее, чтобы правильно рассчитать число вспомогательных каналов.
С другой стороны, без специального анализа ситуации помех можно предусматривать всенаправленные вспомогательные датчики. Вместе с тем, может оказаться желательным выбор датчиков, направленных в сторону помех, чтобы повысить эффективность системы. В этих условиях перед конфигурированием вспомогательных каналов необходимо произвести анализ ситуации помех.
Анализ ситуации помех с целью их характеристики можно применять в фазе инициализации на основании анализа содержимого защитных полос на R1 ступеней. При этом можно использовать различные типы анализа, известные специалистам.
Калибровка и компенсация каналов приема
Можно предусматривать любую методику калибровки и компенсации каналов приема, совместимую с материальной архитектурой. В изобретении можно применять способ, описанный в ссылке [3].
Вычисление и применение весовых обработок
Вычисление весовых обработок и этап пространственного фильтрования содержит, по меньшей мере, следующие операции:
- выделение полезных полос и защитных полос,
- определение порогов уровня эталонов, полученных на этапе выделения,
- вычисление весовых обработок,
- применение весовых обработок,
- повторная инициализация.
Выделение полезных полос и защитных полос
Для каждой ступени и для каждого растянутого блока ступени операцию выделения полезных полос и защитных полос растянутого блока можно осуществлять при помощи дискретного преобразования Фурье (TFD) для преобразования эталонов по основной полосе этого растянутого блока.
К является обозначением числа векторных эталонов, x(k) (1≤k≤K), по основной полосе, полученных в результате оцифровки общей полосы Be растянутого блока с добавлением, в случае необходимости, нулей для получения числа эталонов, равного степени 2, и максимального разрешения, соответствующего доле подполос анализа. После этого, если Np является числом точек TFD, а Nr - числом реализаций TFD, первоначальное число эталонов являются таким, что K = Np Nr. Для реализации r1 преобразование TFD для Np векторных эталонов x(k) ((r-1)Np + 1≤k≤r Np) дает ряд Np частотных векторных эталонов xr(fi)(1≤i≤Np).
В этих условиях, если число полезных (под)полос обозначить Ub и число защитных (под)полос растянутого блока обозначить G, операция выделения полезных и защитных полос для каждой из Nr реализаций r преобразования TFD состоит в выделении:
- для каждой из полезных полос u(1≤u≤Ub) растянутого блока: Nu соответствующих частотных эталонов, xr(ful)(1≤l≤Nu),
- для каждой из защитных полос g(1≤g≤G) растянутого блока: Ng соответствующих частотных эталонов, xr(fgm)(1≤m≤Ng).
Определение порогов уровня эталонов
Для дальнейшей обработки учитываются только частотные эталоны защитных полос растянутого блока, уровень которых не превышает определенного порога, чтобы избежать ненужного повышения уровня фонового шума.
В частности, рассматриваются только векторные частотные эталоны защитных полос растянутого блока, xr(fgm), такие как:
где Порог является заранее выбранным фиксированным параметром.
В дальнейшем Mg будет обозначать число частотных векторных эталонов, учитываемых для защитной полосы g растянутого блока. В присутствии порога: Mg ≤ Ng.
Вычисление весовых обработок
Эта обработка, связанная с выбранным RBS, является обработкой типа OLS-RBS с добавлением искусственного шума, чтобы предупредить, в случае необходимости, режекцию слабых помех в области охвата, которые нежелательно режектировать.
Считая, что датчик 1 является главным датчиком и что выбраны N-1 вспомогательных датчиков (не более 3), вычисляемый на каждой ступени набор весовых обработок w борьбы с помехами размером N, получают по формуле:

где с является вектором, первая составляющая которого равна 1, а остальные - 0,
cТ = (1, 0, … 0) и где  является матрицей (N,N), определяемой как:
является матрицей (N,N), определяемой как:

где δ - мощность добавляемого искусственного шума и где  является оценочной величиной матрицы корреляции шума плюс единичные источники помех на частотных эталонах, выбранных из совокупности защитных полос Pu1 растянутых блоков ступени, определяемой формулой:
является оценочной величиной матрицы корреляции шума плюс единичные источники помех на частотных эталонах, выбранных из совокупности защитных полос Pu1 растянутых блоков ступени, определяемой формулой:

где xr(flgm) соответствует векторному эталону m, выбранному на защитной полосе g растянутого блока I для реализации r преобразования FFT.
Вводимый искусственный шум является таким, чтобы:
где α является константой, при которой 10log10(α) следует регулировать по определенному уровню и где δref соответствует мощности контрольного искусственного шума, зависящей от зоны охвата и от вспомогательных датчиков, такой, что:
где π является максимальной мощностью защищаемой помехи, J(i) является составляющей i вектора направления этой помехи, и σi 2 - мощностью фонового шума для датчика i.
Применение весовых обработок
После этого на основании набора весовых обработок w и векторных эталонов основной полосы x(k) (1≤k≤K) для каждого растянутого блока наиболее целесообразным путем будет:
- создание - путем пространственного фильтрования эталонов x(k) - эталонов по основной полосе рассматриваемого растянутого блока, не содержащих помех, y(k) (1≤k≤K), отвечающих условию:
- введение этих эталонов, связанных с растянутым блоком, в систему демультиплексирования каналов для фильтрования и демодуляции.
Повторная инициализация
В случае обнаружения изменения ситуации помех или в случае неэффективности борьбы с помехами следует повторить фазу выбора оцифровываемых вспомогательных датчиков.
Источники информации
1. K. BAKHRU, D.J. TORRIERI, “The maximum algorithm for adaptive arrays and frequency hopping communications”, IEEE Trans Ant Prop, том АР-32, № 9, стр. 919-928, сентябрь, 1984.
2. D.J. TORRIERI, K. BAKHRU, “An anticipative adaptive array for frequency-hopping communications, IEEE Trans Aerosp Elect System, том AES-24, № 4, стр. 449-456, июль, 1988.
3. C. DONNET, P. CHEVALIER, «Procédé et dispositif de tarageégalisation d'un système de récepion», № 02.12010, сентябрь, 2002.

Изобретение относится к технике связи и предназначено для борьбы с помехами в системе связи, где линии связи являются линиями связи со скачками частот. Технический результат состоит в повышении помехоустойчивости связи. Для этого сигнал содержит несколько ступеней частоты, а система содержит, по меньшей мере, один главный датчик и один или несколько вспомогательных датчиков. Способ содержит, по меньшей мере, следующие этапы: вводят одну или несколько защитных полос между полезными полосами сигнала со скачком частоты, при этом общую площадь введенных защитных полос выбирают таким образом, чтобы удовлетворять выбранному значению вероятности перехвата помех, выбирают сигналы введенных защитных полос, уровень которых превышает данный порог, определяют набор весовых обработок пространственного фильтрования для каждой ступени сигнала, учитывая матрицу корреляции шума плюс единичные источники помех на выбранных сигналах, при помощи набора вычисленных весовых обработок фильтруют сигналы в основной полосе совокупности растянутых блоков ступени, чтобы генерировать растянутые блоки, не содержащие помех. 2 н. и 7 з.п. ф-лы, 7 ил.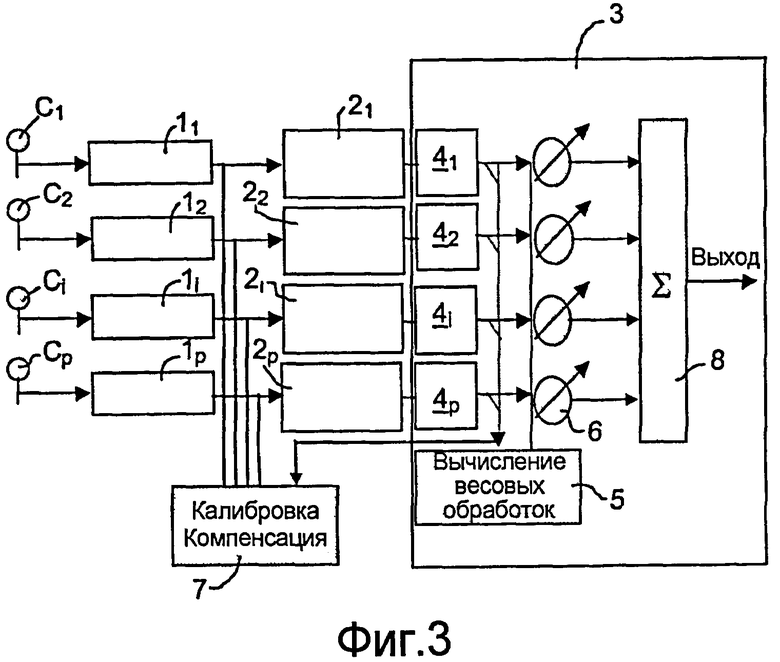
1. Способ борьбы с помехами в системе связи, где линии связи являются линиями связи со скачкообразной перестройкой частоты, при этом сигнал содержит несколько интервалов по времени и частоте, при этом система содержит, по меньшей мере, один главный датчик и один или несколько вспомогательных датчиков, отличающийся тем, что содержит, по меньшей мере, следующие этапы:
- вводят одну или несколько защитных полос между полезными полосами сигнала со скачкообразной перестройкой частоты, при этом общую площадь введенных защитных полос выбирают таким образом, чтобы удовлетворить выбранному значению вероятности перехвата помех, при этом формируется расширенный временной интервал из нескольких расширенных блоков, содержащих полезные блоки и введенные защитные полосы,
- выбирают сигналы введенных защитных полос, уровень которых превышает заданное пороговое значение,
- определяют набор весовых коэффициентов пространственной фильтрации для каждого временного интервала сигнала, учитывая матрицу корреляции шума плюс одиночные источники помех, на выбранных сигналах,
- при помощи набора вычисленных весовых коэффициентов фильтруют сигналы основной полосы из совокупности расширенных блоков временного интервала, чтобы сгенерировать расширенные блоки, не содержащие помех.
2. Способ по п.1, отличающийся тем, что число и положение защитных полос, вводимых между полезными полосами, выбирают таким образом, чтобы различать полезные передатчики от помех и чтобы гарантировать вероятность перехвата мешающих помех в РВmах% случаев, если форма сигнала допускает (100-РВmах)% зашумленных временных интервалов.
3. Способ по п.2, отличающийся тем, что защитные полосы выбирают путем реализации следующих этапов:
- спектрально группируют полезные сигналы в Рu1 блоков эквивалентной полосы Bu1, которые, в свою очередь, могут состоять из Рu2 подблоков полосы Bu2(Bu1=Pu2×Вu2), причем полоса связана с пропускной способностью, ниже которой возникает необходимость в борьбе с помехами на основе антенной обработки,
- спектрально вводят защитную полосу Bg1 между каждым полезным подблоком и в начале и в конце временного интервала,
- кроме защитных полос Bg1 и для каждого полезного блока полосы Bu1 спектрально вводят один или несколько защитных блоков полосы Bg2, которая слегка больше Вu2, соответствующим образом между полезными подблоками в различных положениях, от одного полезного блока Bu1 к другому, таким образом, чтобы надежно перехватывать мешающие помехи, в частности, в спектральных линиях,
причем полезный блок вместе с его защитными полосами определяется как расширенный блок, и действия осуществляют таким образом, чтобы Рu1 расширенных блоков одного временного интервала были смежными, то есть с нулевым пространством между ними, при этом две защитные полосы на каждом конце каждого расширенного блока являются общими для соседних расширенных блоков.
4. Способ по любому из пп.1-3, отличающийся тем, что определение весовых коэффициентов содержит для каждого временного интервала и для каждого расширенного блока временного интервала этап выделения полезных полос и защитных полос, содержащий:
полагая K равным числу выборок вектора основной полосы, x(k) (l≤k≤K), полученных в результате оцифровки общей полосы Be расширенного блока,
полагая Np равным числу точек преобразования DFT, и Nr - числу реализации DFT для реализации r, преобразование DFT для Np выборок вектора x(k) ((r-1)Np+1≤k≤r Np) формирует ряд из Np частотных выборок вектора xr(fi)(l≤i≤Np),
полагая Ub равным числу полезных (под)полос, и G - числу защитных (под)полос расширенного блока, операция выделения полезных и защитных полос, для каждой из Nr реализации r преобразования DFT, состоит в выделении:
- Nu соответствующих частотных выборок, xr(fu1)(1≤1≤Nu) для каждой из полезных полос u(1≤u≤Ub) расширенного блока,
- Ng соответствующих частотных выборок, xr(fgm)(1≤m≤Ng) для каждой из защитных полос g(1≤g≤G) расширенного блока.
5. Способ по п.4, отличающийся тем, что в нем используют пороговое значение, определяемое на основании частотных выборок вектора защитных полос расширенного блока:

причем Пороговое значение является заранее выбранным фиксированным параметром.
6. Способ по любому из пп.1-3, 5, отличающийся тем, что набор весовых коэффициентов w для борьбы с помехами, с размером N, вычисляемый в каждом временном интервале, получают по формуле:

где с является вектором, первая составляющая которого равна 1, а остальные 0, причем  и где
и где  является матрицей (N,N), определяемой как:
является матрицей (N,N), определяемой как:

где δ - мощность добавляемого искусственного шума, и где  является оценкой матрицы корреляции шума плюс одиночные помехи на частотных выборках, выбранных из совокупности защитных полос Pu1 расширенных блоков временного интервала, определяемая по формуле:
является оценкой матрицы корреляции шума плюс одиночные помехи на частотных выборках, выбранных из совокупности защитных полос Pu1 расширенных блоков временного интервала, определяемая по формуле:

где xr(flgm) соответствует выборке вектора m, выбранной в защитной полосе g расширенного блока l для реализации r преобразования FFT.
7. Способ по п.6, отличающийся тем, что мощность искусственного шума имеет форму:

где α является константой, такой что 10log10(α) должно быть отрегулировано к определенному уровню, и где δref соответствует мощности опорного искусственного шума, зависящей от зоны охвата и от вспомогательных датчиков и такой, что:
где π - максимальная мощность помехи, в отношении которой должна осуществляться защита, J(i) - составляющая i вектора направления этой помехи, и σi 2 - мощность фонового шума для датчика i.
8. Способ по любому из пп.1-3, 5, 7, отличающийся тем, что упомянутый сигнал является сигналом с изменением частоты (EVF).
9. Применение способа по любому из пп.1-8 для борьбы с помехами в системе связи, причем линии связи в упомянутой системе связи являются EVF восходящими линиями связи, в спутниковом применении.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| УСТРОЙСТВО БОРЬБЫ С ШУМОВЫМИ ПОМЕХАМИ | 2001 |
|
RU2208294C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

