Изобретение относится к области авиационной техники и может быть использовано в конструкции многовинтовых гибридных электроконвертопланов с расположением одной, двух или трех пар трехвинтовых модулей, смонтированных на поворотных частях консолей одного крыла, двух или трех тандемных крыльев, выполненных по системе распределенной тяги разновеликих винтов, имеющих по два меньших винта, расположенных вокруг большего винта за внешним и внутренним его квадрантами, обеспечивающих возможность выполнения вертикального или короткого взлета и посадки (ВВП или КВП), но и короткого взлета и вертикальной посадки (КВВП).
Известен проект конвертоплана модели "V-280 Valor" компании "Bell Helicopter" (США), представляющий собой моноплан с высокорасположенным крылом и на концах его консолей смонтированы двигатели и от них отдельно редукторы с винтами, установленными в поворотных гондолах, при повороте которых он преобразовывается в вертолет двухвинтовой поперечной схемы, имеющий в центроплане главный редуктор с синхронизирующим валом, проложенным внутри крыла, развитое V-образное оперение и трехстоечное убирающееся колесное шасси, с хвостовой опорой.
Признаки, совпадающие - наличие поворотных гондол с тянущими винтами, создающими горизонтальную и соответствующим отклонением вертикальную тягу, диапазон поворота винтов от 0° до +97,5°, система трансмиссии с синхронизирующим валом, проложенным внутри крыла и обеспечивающим равномерное распределение мощности силовой установки между поворотными винтами. Особенностью конструкции транспортного конвертоплана с пассажировместимостью 11 человек и радиусом действия до 926…1481 км станет неподвижное размещение двигателей: при переходе в самолетный режим полета поворачиваться будут только тянущие винты.
Причины, препятствующие поставленной задаче: первая - это то, что размещение на концах крыла поворотных гондол с редукторами и винтами, имеющими автоматы перекосов с управлением их общего, циклического и дифференциального изменения их шага, предопределяет конструктивно сложное прямое крыло с валами трансмиссии, оснащенное сложной системой поворота винтов и механизации крыла, что усложняет конструкцию и уменьшает надежность, но и значительно увеличивает габаритные размеры по ширине с вращающимися винтами. Вторая - это то, что диаметры двух винтов ограничены размахом консолей крыла и, как следствие, при висении поток от винтов, обдувая консоли крыла и создавая значительную общую потерю (≈23%) в вертикальной их тяге, затормаживается и большие скорости потока, отбрасываемого от них, предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что силовая установка включает двигатели избыточной мощности, используемой при выполнении ВВП на 50%, что весьма снижает весовую отдачу, особенно при отказе одного из них, а расположение на концах крыла поворотных винтов диаметром 7,93 м будет иметь ограничения в достижении крейсерской скорости только до 518,6 км/ч. Четвертая - это то, что горизонтальная тяга винтов обеспечивается только в крейсерском полете, поэтому после его выполнения и при возможном отказе узлов поворота гондол взлетать и садиться «по-самолетному», как обычный самолет, этот конвертоплан не может, так как радиус его поворотных винтов гораздо больше высоты установки гондол на концах крыла, но это не исключает возможность выполнения КВП. Все это ограничивает возможность уменьшения массы конструкции планера и дальнейшего увеличения взлетного веса и весовой отдачи, особенно при удвоении тяговооруженности и без дальнейшего увеличения диаметра несущих винтов, но и без цельноповоротного переднего горизонтального оперения (ЦПГО), улучшения продольной стабильности и управляемости с развитым V-образным оперением.
Известен полномасштабный беспилотный электроконвертоплан (БЭКП) "Project Zero" фирмы AgustaWestland (Италия/Англия) [1], содержащий моноплан со среднерасположенным крылом, имеющим с концевыми крылышками внешние съемные его части от кольцевых консолей крыла, внутри последних смонтированы электромоторы с винтами, установленными в поворотных мотогондолах, при повороте которых он преобразовывается в вертолет двухвинтовой поперечной схемы, содержит в фюзеляже из углепластика систему управления и аккумуляторы, V-образное хвостовое оперение и трехстоечное убирающееся колесное шасси, с носовой опорой.
Признаки, совпадающие - наличие поворотных мотогондол с винтами, создающими горизонтальную и соответствующим отклонением вертикальную тягу, диапазон поворота мотогондол с винтами от 0° до +97,5°, содержит систему управления, равномерно распределяющую зарядку аккумуляторов полномасштабного БЭКП между поворотными электромоторами с тянущими винтами, обеспечивающими скорость до 500 км/ч и высоту полета до 7500 м, неразвитое V-образное хвостовое оперение и трехстоечное убирающееся колесное шасси, с носовой вспомогательной опорой. Для зарядки аккумуляторов воздушные винты при его нахождении на земле могут выставляться в "наклонном" положении, играя роль ветряков электрогенераторов.
Причины, препятствующие поставленной задаче: первая - это то, что консольное размещение в кольцевых консолях крыла поворотных мотогондол с электромоторами и винтами предопределяет конструктивно сложное крыло необычной формы, оснащенное сложной механизацией и рулевыми поверхностями крыла - элевонами, что усложняет конструкцию. Вторая - это то, что диаметры двух тянущих винтов ограничены размахом кольцевых консолей крыла и, как следствие, ограничивают вертикальную тяговооруженность, а возможность короткого взлета и посадки с отклоненными вверх тянущими винтами на угол 45° при обеспечении угла опрокидывания φ=15° предопределяет удлинение высоты стоек шасси на 10…12%. Третья - это то, что горизонтальная тяга винтов обеспечивается только в крейсерском полете, поэтому после его выполнения и при возможном отказе узлов поворота мотогондол с винтами взлетать и садиться «по-самолетному», как обычный самолет, этот двухвинтовой БЭКП не может, так как радиус его тянущих винтов гораздо больше высоты установки мотогондол внутри кольцевых консолей крыла, что значительно уменьшает безопасность и сложность продольного и поперечного управления с V-образным оперением, особенно на переходных режимах полета и без ЦПГО, когда у такого крыла вектор его тяги не уравновешивается. Недостатком является также неразвитое хвостовое оперение, отсюда плохая и путевая устойчивость и особенно при отказе одного из электромоторов при асимметрии тяги. Поскольку электрические двигатели с постоянными магнитами имеют один источник их энергии от пакета литиево-ионных аккумуляторных батарей с плотностью энергии 0,2 кВт/кг и если взлетная масса полномасштабного демонстратора "Project Zero" сопоставима с массой, например, вертолета MD-500 (около 1230 кг), то анализ показывает, что масса узлов и компонентов, которые могут быть заменены электрическими устройствами (двигатель, трансмиссия, системы силовой установки (СУ), топливная система и др.), составляет 27…40% от взлетной его массы. Поэтому если ожидаемое время полета такого БЭКП может составлять порядка 20…25 минут, то только двухрежимная гибридная СУ, в которой используется совместный привод несущих винтов от газотурбинных двигателей и электродвигателей с генераторным источником питания и аккумуляторными батареями, используемыми в качестве аварийного источника питания (для посадки при отказах), может обеспечить достижение продолжительности полета 2…3 часа. Все это ограничивает возможность дальнейшего увеличения взлетного веса и весовой отдачи при повышении тяговооруженности тяжелого БЭКП. Поэтому при полной электрификации СУ такого БЭКП (с взлетной массой 1230 кг) с использованием в качестве источника энергии аккумуляторов с нынешней удельной массой 9 кг/кВт·ч и даже в 4 раза ее меньшей при заданном времени полета 2…3 часа создание полномасштабного БЭКП осуществить не возможно, а с удельными характеристиками параллельно-последовательной гибридной СУ его масса уменьшится на 35…40% (сопоставимые с массой аккумуляторов) по сравнению с традиционной схемой и его полномасштабная электрическая модель может быть освоена. Кроме того, современные технологии позволяют обеспечить следующие величины удельной массы электрических устройств как для электропривода (электродвигатель с блоком управления) до 0,32 кг/кВт (при мощности более 250 кВт), так и для электрогенератора до 0,23 кг/кВт, например газотурбинный двигатель с обратимым электромотором-генератором при мощности более 300 кВт. Поэтому только многодвигательные параллельно-последовательные гибридные СУ могут обеспечить как выполнение заданного времени крейсерского полета 3…5 часов, так и создание многовинтового гибридного электроконвертоплана.
Наиболее близким к предлагаемому изобретению является конвертоплан модели "Хиллер 1045" (США) [2, стр.173], содержащий планер из композитных материалов с трапециевидным крылом, на поворотных консолях которого смонтированы в мотогондолах двигатели с редукторами и винтами, создающими горизонтальную и соответствующим их отклонением вертикальную тягу, синхронизирующую Т-образную в плане систему валов трансмиссии, связывающую между собой два двигателя и их с рулевыми соосными винтами, смонтированными за Т-образным оперением на конце удлиненной балки, трехстоечное убирающееся колесное шасси, с носовой вспомогательной и главными опорами, убираемыми в носовой и бортовые отсеки.
Признаки, совпадающие - наличие на цельноповоротных консолях под крылом мотогондол с тянущими винтами, преобразующими горизонтальную тягу в вертикальную соответствующим их отклонением совместно с консолями крыла вверх от горизонтального положения на угол 90°, диапазон поворота консолей крыла от 0° до +100°, вращение винтов - синхронизирующее, крыло малого удлинения, имеющее два главных больших винта и два меньших кормовых рулевых соосных винта для продольного управления. Все винты без автоматов перекосов с управлением их общего и дифференциального изменения шага, но и вращательно связаны посредством Т-образной в плане синхронизирующей системы соединительных валов трансмиссии.
Причины, препятствующие поставленной задаче: первая - это то, что расположение поворотных консолей крыла с двигателем, редуктором и винтами предопределяет конструктивно сложное прямое крыло, оснащенное сложной системой поворота и механизации крыла, что усложняет конструкцию и уменьшает надежность. Вторая - это то, что поворотные консоли крыла с винтами с увеличением его угла атаки на переходных режимах полета, без наличия ЦПГО и V-образного оперения создают опасность появления на крыле срыва потока до создания винтами необходимой подъемной силы, что ухудшает стабильность и продольную управляемость. Третья - это то, что рулевые соосные винты продольного управления, выполненные трехлопастными с изменяемым шагом, установлены в хвостовой части фюзеляжа и смонтированы на хвостовой складывающейся балке. Это усложняет конструкцию и предопределяет использование специального интегрирующего устройства управления, которое на переходных режимах полета с учетом возможного срыва потока на крыле не обеспечивает достаточную стабильность управления и значительно увеличивает опасность, создаваемую рулевыми винтами для наземного персонала на вертолетных режимах полета. Все это весьма усложняет конструкцию и уменьшает надежность, но и ограничивает возможность увеличения взлетного веса и повышения весовой отдачи, особенно при удвоении тяговооруженности и без дальнейшего увеличения диаметра винтов.
Предлагаемым изобретением решается задача в указанном выше конвертоплане "Хиллер 1045" увеличения взлетного веса и повышения весовой отдачи, транспортной и топливной эффективности, упрощения конструкции и исключения главного редуктора с валами трансмиссии и удлиненной балки с рулевыми соосными винтами, увеличения скорости, дальности и высоты полета, упрощения продольной управляемости при переходных маневрах, вертикальном взлете, посадке и висении и улучшения поперечной и путевой устойчивости, а также управляемости по крену и курсу.
Отличительными признаками предлагаемого изобретения от указанного выше известного конвертоплана "Хиллер 1045", наиболее близкого к нему, являются наличие того, что на поворотных частях консолей крыла типа "чайка", имеющих по размаху разновеликие внутренние и внешние секции соответственно с положительным и отрицательным углом их поперечного V и оснащенных на нижней части изломов крыла гибридными мотогондолами трехвинтовых модулей, выполненных с возможностью работы при различных углах их отклонения в вертикальной плоскости, имеющих разновеликие тянущие винты, каждый левый и правый больший из которых, установленный в соответствующей гибридной мотогондоле с передним расположением силовой ее установки, вынесен вперед за переднюю кромку крыла и от плоскости вращения двух меньших винтов, размещенных ближе к передней кромке крыла и вокруг большего винта за внешним и внутренним его квадрантами по системе распределенной тяги разновеликих винтов (РТРВ) в соответствующих каплевидной формы мотогондолах с передним расположением электродвигателя, установленных вдоль средней линии на концах верхних и нижних пилонов, смонтированных соответственно сверху на больших внутренних и снизу на конце меньших внешних секций крыла таким образом, что при синхронном повороте их всех и создании ими вертикальной тяги передние внешние и задние внутренние меньшие винты, имеющие равновеликие расстояния от вертикальных осей их вращения до поперечной плоскости, проходящей через центр масс и вертикальные оси вращения больших винтов, располагающиеся с вертикальными осями меньших винтов в направлении полета в расходящейся V-образной конфигурации в плане относительно крыла, образующего с ЦПГО и V-образным оперением, продольную схему триплана и снабжен возможностью изменения полетной его конфигурации с многовинтового гибридного электровертолета с шестью флюгерно-реверсивными несущими винтами, размещенными в двух поперечных системах РТРВ-(Х1+2), имея при этом ярусное расположение тянущих винтов, обеспечивают вертикальный взлет, посадку и висение при полной компенсации реактивных крутящих моментов от всех несущих винтов, имеющих противоположное направление вращения между левым и правым большими винтами трехвинтовых модулей, а также между меньшими винтами как в каждой левой и правой их паре, так и в каждой передней и задней их паре, но и при одинаковом направлении вращения между несущими винтами в каждой диагональной группе меньших винтов, в полетную конфигурацию электросамолета, позволяющего достичь первой или второй крейсерской скорости полета с двух- или четырехвинтовой движительной системой, соответственно с одной или двумя парами винтов в соответствующих трехвинтовых модулях, в каждом из которых больший или два меньших винта устанавливаются соответственно во флюгерное положение и последние из них, расположенные вокруг большего винта с межцентровым расстоянием от последнего, определяемым из соотношения: Амр- (R+r), м (где Амр - межцентровое расстояние, R и r - радиусы большего и меньших винтов соответственно), но и обратно, при этом диаметры несущих винтов в каждом трехвинтовом модуле, определяемые из соотношения: D=d×
Кроме того, с целью удвоения взлетного веса и полезной нагрузки при выполнении ВВП, исключения ЦПГО и над- и подкрыльевых пилонов он выполнен по аэродинамической схеме тандем с вертикальным оперением и разновеликими крыльями, меньшее из которых с двумя системами РТРВ-(Х1+2), расположенными параллельно и ниже двух систем РТРВ-(Х1+2) большего крыла, при этом и передние, и задние поворотные системы с трехвинтовыми модулями, имеющими меньшие винты, смонтированные под соответствующим крылом так, что при соответствующем повороте их всех со всеми винтами, создающими подъемную силу всеми несущими винтами, имеющими равновеликие расстояния от вертикальных осей вращения всех винтов переднего и заднего крыльев до поперечной плоскости, проходящей через центр масс.
Кроме того, с целью полуторакратного увеличения взлетного веса и полезной нагрузки при выполнении ВВП он в аэродинамической схеме трех высокорасположенных тандемных крыльев, имея наряду с разновеликими передним меньшим и средним большим крыльями с соответствующими четырьмя поворотными системами РТРВ-(X1+2), оснащен задним крылом, равновеликим с передним, имеющим две поворотные системы РТРВ-(Х1+2), три левые и три правые из которых, размещенные так, что на внутренних секциях каждой консоли крыла, имеющих длину от узла их поворота до оси вращения большего винта, равновеликую сумме радиуса большего и диаметра меньшего винта, создают при соответствующем их повороте подъемную силу всеми несущими винтами, имеющими равновеликие расстояния от вертикальных осей вращения всех винтов переднего и заднего крыльев до поперечной плоскости, проходящей и через центр масс, и вертикальные оси вращения всех винтов среднего крыла.
Благодаря наличию этих признаков, позволяющих выполнить высокоскоростной многовинтовой гибридный электроконвертоплан с поперечным расположением одной, двух или трех пар трехвинтовых модулей, смонтированных на поворотных секциях консолей одного крыла типа "чайка", двух или трех тандемных крыльев, выполнен по системе распределенной тяги разновеликих винтов (РТРВ), имеющих в каждом модуле по два меньших винта, расположенных вокруг большего винта за внешним и внутренним его квадрантами, обеспечивающих возможность преобразования его полетной конфигурации с гибридного электровертолета, например, с шестью флюгерно-реверсивными несущими винтами, образующими две системы ярусного расположения несущих винтов и обеспечивающими вертикальный взлет, посадку и висение, имеющими при этом от всех несущих винтов полную компенсацию реактивных крутящих моментов, в полетную конфигурацию электросамолета, позволяющего достичь первой или второй крейсерской скорости полета с двух- или четырехвинтовой движительной системой, соответственно с одной или двумя парами тянущих винтов в соответствующих трехвинтовых модулях, но и обратно. При этом, наряду с двумя большими винтами, смонтированными на поворотных секциях крыла в гибридных мотогондолах с передним расположением силовой ее установки, она снабжена двумя меньшими винтами, размещенными вдоль средней линии на концах как верхних, так и нижних пилонов, смонтированных соответственно как на внутренних, так и концах внешних секций крыла в соответствующих каплевидной формы мотогондолах с передним расположением электродвигателя, и вынесенных вперед за переднюю кромку крыла и от плоскости вращения двух меньших винтов, размещенных ближе к передней кромке крыла, образующего с ЦПГО и V-образным оперением, продольную схему триплана. Это позволит, уменьшая вес планера и потери вертикальной тяги от левых и правых винтов в трехвинтовых модулях, увеличить полезную нагрузку и повысить весовую отдачу, но и транспортную и топливную эффективности. В гибридной СУ во время крейсерского полета увеличение генерирующей мощности для электропитания, когда падение заряда литиево-ионной аккумуляторной батареи снизится до 30% от ее максимума система управления в каждой гибридной мотогондоле автоматически отключит выходной муфтой сцепления больший тянущий винт от ОЭМГ, имеющего с соответствующим винтом расположенную горизонтально ось их вращения на самолетных режимах полета, установит его лопасти во флюгерное положение и включит ГТД в каждой гибридной мотогондоле большей группы винтов, который будет вращать ОЭМГ, работающий в режиме электрогенератора, обеспечивающего подзарядку пакета литиево-ионных аккумуляторов в крейсерском режиме полета. Это, наравне с последним, позволит также при переходных маневрах повысить путевую устойчивость и управляемость по курсу, но и продольную стабильность и поперечную управляемость при висении, а размещение каждой гибридной мотогондолы большей группы винтов по обе стороны от оси симметрии обеспечит значительное упрощение системы управления электроприводами, но и позволит исключить вредную обдувку выхлопными газами соответствующего ГТД меньших тянущих винтов. Кроме того, это позволит также достичь весьма малошумной гибридной СУ, имеющей систему электропривода, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим все электродвигатели и все ГТД, переключающим генерирующую мощность и порядок подзарядки литиево-ионных аккумуляторов, что обеспечит возможность одновременной работы всех электродвигателей, двух ОЭМГ и особенно с двумя ГТД без пиковых перегрузок и при минимальной акустической сигнатуре. Это позволит также повысить безопасность полетов и использовать ГТД меньших габаритов в его поперечнике, что обеспечит значительное уменьшение миделя каждой гибридной мотогондолы и ширину переднего обтекателя носовой ее части, а также потери в вертикальной тяге, особенно больших винтов.
Предлагаемое изобретение многовинтового гибридного электроконвертоплана (МГЭК) и варианты его исполнения и использования представлены на фиг.1 и 2.
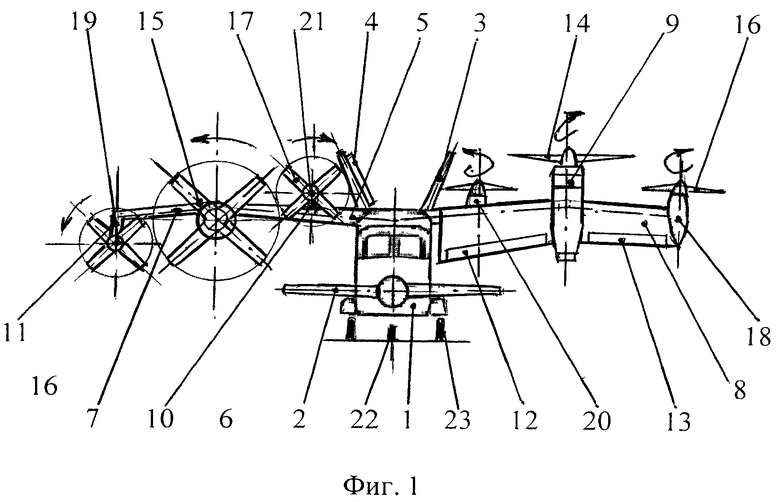
На фиг.1 на общем виде спереди изображен гибридный МГЭК с условным расположением на вертолетных и самолетных режимах полета соответственно левого и правого поворотных трехвинтовых модулей системы РТРВ-(Х1+2), имеющих на внутренних и внешних пилонах крыла меньшие винты, установленные вокруг больших.
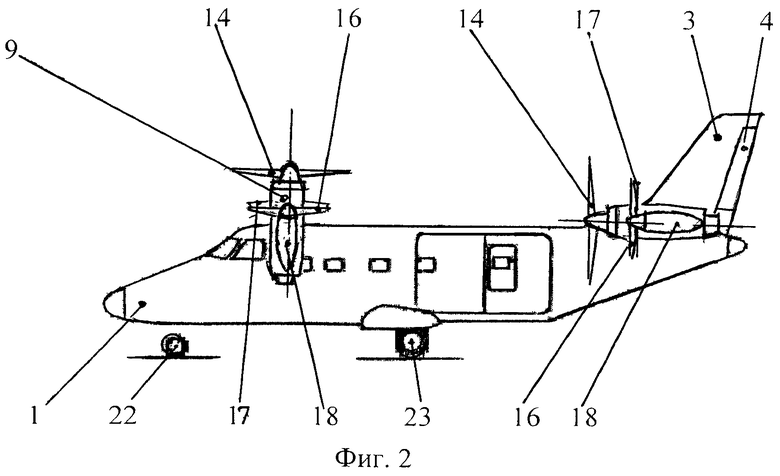
На фиг.2 на общем виде сбоку изображен МГЭК с условным расположением трехвинтовых модулей системы РТРВ-(Х1+2) на вертолетных и самолетных режимах полета соответственно на переднем и заднем тандемных крыльях, имеющих на внутренних и внешних пилонах крыла меньшие винты, установленные вокруг больших.
Высокоскоростной МГЭК-Х6, выполненный из композитных материалов по продольной схеме триплана и концепции поперечного расположения двух трехвинтовых модулей системы РТРВ-(Х1+2) и представленный на фиг.1, содержит фюзеляж 1, ЦПГО 2, V-образное оперение 3 с рулевыми поверхностями 4 и высокорасположенное крыло 5, имеющее разновеликие внутренние 6 и внешние 7 секции соответственно с положительным +4° и отрицательным углом -4° их поперечного V и поворотные его части 8 с гибридными мотогондолами 9. По обе стороны от последних размещены внутренние надкрыльевые 10 и внешние подкрыльевые 11 пилоны на конце крыла 5, смонтированные сверху и снизу последнего, выполняющие роль дополнительных килей и законцовок крыла 5, увеличивают курсовую устойчивость и его несущую способность соответственно. Трапециевидное крыло 5 типа "чайка" с закрылками 12 выполнено с элеронами 13, снабженными левым 14 и правым 15 большими тянущими винтами, смонтированными в гибридных мотогондолах 9 с передним в них расположением ГСУ. Каждая гибридная мотогондола 9 на внутренних и внешних секциях крыла 5 снабжена внешним 16 и внутренним 17 меньшими тянущими винтами, размещенными по концепции кругового их расположения относительно соответствующих больших винтов 14-15 в соответствующих каплевидной формы мотогондолах 18-19 и 20-21, установленных соответственно на внешних подкрыльевых 11 и внутренних надкрыльевых 10 пилонах и имеющих переднее расположение электродвигателя, вращательно связанного с соответствующим меньшим тянущим винтом 16-17.
Гибридная СУ выполнена по параллельно-последовательной технологии силового привода и снабжена левыми 18 и правыми 19 внешними и левыми 20 и правыми 21 внутренними мотогондолами с электродвигателями, вращательно связанными с соответствующими четырьмя винтами 16-17 меньшей группы, но и двумя гибридными мотогондолами 9, в каждой их которых наряду с левым 14 и правым 15 большим винтом размещен ОЭМГ, вращательно связанные как с соответствующим большим винтом 14-15 через муфту сцепления, так и с ГТД. Гибридная СУ содержит систему электропривода, включающую все электродвигатели, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электродвигатели, ОЭМГ и ГТД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов, который обеспечивается только при горизонтальном полете его программируемым системно-логическим контроллером блока управления, получая от датчика уровня зарядки аккумуляторов и наличии их полной зарядки или падении ее до 30% от ее максимума, выдает управляющие сигналы на выполнение при этом соответственно очередного времени зависания или включение в каждой гибридной мотогондоле 9 ГТД для генерации мощности от внутреннего источника, но и дистанционное управление выходной электромагнитной муфтой сцепления, расцепляющей выходной вал ОЭМГ с валом соответствующего большего винта 14-15, установленного во флюгерное положение (на фиг.1 не показаны). При этом ГТД, выполненные, в частности, для их работы при различных углах их отклонения, снабжены по внешним бортам гибридных мотогондол 9 выхлопными патрубками и установлены с максимальной простотой обслуживания и эксплуатации. Четырехлопастные винты двух трехвинтовых модулей, смонтированных на поворотных частях 8 крыла 5, имеют диапазон поворота от 0° до +100°, выполнены флюгерно-реверсивными и без автоматов перекоса их лопастей и с жестким креплением угле- и стеклопластиковых лопастей и возможностью широкого изменения углов их установки. Поворот трехвинтовых модулей с винтами большими 14-15 и меньшими 16-17, преобразующих его полетную конфигурацию с вертолета шестивинтовой несущей схемы в четырех- или двухвинтовой самолет продольной схемы триплана, осуществляется с помощью электромеханических приводов, а выпуск и уборка колесного шасси, управление ЦПГО 2, элеронами 13, закрылками 12 и рулями направления 4 осуществляется электрически. Трехопорное убирающееся колесное шасси, вспомогательная носовая опора с мотор-колесом 22 убирается в переднюю нишу фюзеляжа 1, главные боковые опоры с колесами 23 - в бортовые отсеки.
Управление гибридным МГЭК-Х6 обеспечивается общим и дифференциальным изменением шага шести поворотных винтов: двух больших 14-15 и четырех меньших винтов 16-17 и отклонением ЦПГО 2 и рулевых поверхностей 4 и 13, работающих в зоне активного обдува этих винтов. При крейсерском полете подъемная сила создается крылом 5 и ЦПГО 2, горизонтальная тяга при 1-й или 2-й крейсерской скорости полета - большими двумя винтами 14-15 или только четырьмя меньшими 16-17 соответственно, на режиме висения только винтами большими 14-15 и меньшими 16-17, на режиме перехода - крылом 5 и ЦПГО 2 с винтами большими 14-15 и меньшими 16-17. При переходе к вертикальному взлету-посадке (висению) закрылки 12 крыла 5 отклоняются на максимальные их углы синхронно с поворотов двух больших 14-15 и четырех меньших 16-17 от горизонтального положения, отклоняясь одновременно все из них вверх, устанавливаются вертикально (см. фиг.1). При переходе с самолетного режима полета на режим висения и если возникает момент тангажа (Mz), то он парируется отклонением ЦПГО 2, создающим, работая в зоне обдува меньших винтов 16-17, парирующую силу. После установки поворотных винтов двух больших 14-15 и четырех меньших винтов 16-17 в вертикальное положение вдоль линий вертикальной их тяги осуществляется возможность вертолетных режимов полета. С приближением к поверхности земли (палубы корабля) и полете вблизи них несущие винты, два больших 14-15 и четыре меньших винта 16-17, имеющих в каждой диагональной группе несущих винтов одинаковое направление вращения, как передний левый винт с задним винтом, так и задний левый с передним правым винтом соответственно на мотогондолах как 18 и 21, так и 19 и 20 (см. фиг.1), образуют под МГЭК-Х6 область уплотненного воздуха, создающего эффект воздушной подушки, повышающей их эффективность. Поворотные два больших 14-15 и четыре меньших 16-17 винта отклоняются от горизонтального положения в вертикальное на угол 90° и 45° соответственно при вертикальном взлете (посадке) и взлете с коротким разбегом (посадке с коротким пробегом) МГЭК-Х6 на вертолетных и самолетных режимах его полета на взлетно-посадочных режимах в перегрузочном варианте с максимальным взлетным весом. При этом маневрирование МГЭК-Х6 на аэродроме и его разгон до 40-50 км/ч на режимах укороченного взлета обеспечивается от переднего мотор-колеса 22. Для соответствующей посадки высокоскоростного МГЭК-Х6 на поверхность земли (палубы корабля) используются колеса 22 и 23 убирающегося трехопорного шасси.
При висении на вертолетных режимах полета продольное управление МГЭК-Х6 осуществляется изменением шага меньших винтов 16-17 внешней группы и внутренней группы соответственно на мотогондолах 18-19 и 20-21, путевое управление - изменением крутящих моментов каждой диагональной группы винтов, имеющих одинаковое направление вращения четырех меньших несущих винтов 16-17, например как передний левый винт с задним правым винтом, так и задний левый с передним правым винтом. Поперечное управление обеспечивается изменением шага левого большего винта 14 и правого большего винта 15, осуществляющих поперечную балансировку при одновременном изменении шага всех винтов меньшей группы 16-17. Отсутствие при висении перекрытия двух больших 14-15 и четырех меньших винтов 16-17 также значительно снижает вредное их взаимовлияние и повышает их заполнение, что, в свою очередь, значительно уменьшает проблему срыва потока. После вертикального взлета и набора высоты для перехода на самолетный режим полета поворотные два больших 14-15 и четыре меньших винта 16-17 синхронно устанавливаются в горизонтальное положение (см. фиг.1). После чего убираются закрылки 12 и производится крейсерский полет, при котором путевое управление обеспечивается рулями направления 4. Продольное и поперечное управление осуществляется синфазным и дифференциальным отклонением ЦПГО 2 и элеронов 13 соответственно. При полете МГЭК-Х6 на самолетных режимах и создании горизонтальной тяги его тянущие большие винты 14-15 имеют взаимно противоположное их вращение между собой и тем самым устраняют гироскопический эффект и обеспечивают более плавное обтекание крыла 5, но и весьма повышающее эффективность двух больших 14-15 и четырех меньших винтов 16-17 на режимах вертикального взлета, посадки и висения. При его полетной вертолетной конфигурации шестивинтовой несущей схемы реактивные моменты от поворотных винтов двух больших 14-15 и четырех меньших винтов 16-17, используемых как несущие винты, компенсируются полностью за счет также взаимно противоположного их вращения в соответствующих группах винтов.
Таким образом, высокоскоростной МГЭК-Х6, имеющий два трехвинтовых модуля системы РТРВ-(Х1+2), смонтированных на поворотных частях крыла типа "чайка", имеющих по два меньших винта, расположенных вокруг большего винта, представляет собой гибридный вертолет-самолет с полностью электрической многодвигательной ГСУ, позволяющей исключить главный редуктор с валами трансмиссии и, самое главное, выполнить технологии ВВП и КВП соответственно при одновременном отказе двух ГТД и их же с двумя ОЭМГ. Поворотные тянущие винты флюгерно-реверсивные, создающие вертикальную и соответствующим отклонением горизонтальную тягу, обеспечивают необходимые управляющие моменты и уменьшение дистанции при посадке с пробегом. Причем ЦПГО, находясь спереди крыла, создает дополнительную подъемную силу и весьма разгружает его, что и предопределяет возможность легко реализовать выполнение технологии ВВП и КВП, но и КВВП. Важной особенностью применения данной концепции в МГЭК, обеспечивающей качественный рост потребительских свойств, является то, что она масштабируемая и позволяющая наряду с легкими МГЭК-Х6 освоить и средние МГЭК-Х12. Возможно, например, на базе самолета Ил-112 освоение с 3 тандемными крыльями и МГЭК-Х18 тяжелого класса с взлетным весом 17910 и 22710 кг и для перевозки 4,6 и 9,0 т груза с дальностью полета до 2080 и 3360 км при выполнении ВВП и КВП соответственно. Гибридная СУ такою МГЭК-4,6 в 6-ти трехвинтовых модулях (с винтами D/d=3,6/2,5 м) может иметь 12 электромоторов и 6 ОЭМГ суммарной пиковой/номинальной мощности 5610/3085 кВт и 6 генераторных ГТД (Allison Т63-А-5А). Последние при выполнении ВВП могут предоставить еще 1112 кВт (1512 л.с.) и совместно с литиево-ионной батарей позволят МГЭК-4,6 выполнить зависание на 15/20 минут и в самолетной конфигурации пролететь еще 150/100 км до падения ее заряда до 30% от максимального значения. Затем включатся все ГТД и будут подпитывать аккумуляторы. Топливный его бак при выполнении ВВП вмещает 1080 кг, что эквивалентно 3,85 часа его полета и позволит при этом достичь радиуса действия 1040/990 км.
Поэтому возможное создание МГЭК-3,0 и многовинтовых беспилотных электроконвертопланов (МБЭК), имеющих при ВВП/КВП топливную экономичность 11,86/7,07 г/пасс·км, позволяет освоить широкое их семейство (см. табл.1) и достойно конкурировать с компаниями AgustaWestland (Италия/Англия) и "Bell Helicopter" (США), производящими и осваивающими двухвинтовые БЭКП и конвертопланы.
при вертикальном взлете, мин-1
при крейсерском полете, мин-1
1064/1532
1064/1532
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| ГИБРИДНЫЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2577931C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2014 |
|
RU2582743C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых конвертопланов. Гибридный конвертоплан имеет фюзеляж из композитных материалов с высокорасположенным крылом типа «чайка», на поворотных консолях которого на нижних частях изломов смонтированы гибридные мотогондолы трехвинтовых модулей, выполненных с возможностью работы при различных углах их отклонения в вертикальной плоскости. Модули имеют разновеликие тянущие винты. Большие винты установлены в соответствующей мотогондоле с передним расположением силовой установки и вынесены вперед за переднюю кромку крыла и от плоскости вращения меньших винтов. Конвертоплан выполнен с поперечным расположением одной, двух или трех пар трехвинтовых модулей, смонтированных на поворотных частях консолей двух или трех тандемных крыльев, и выполнен по системе распределенной тяги разновеликих винтов, имеющих по два меньших винта, расположенных вокруг большего винта за внешним и внутренним его квадрантами, обеспечивающих возможность преобразования его полетной конфигурации с гибридного электровертолета в полетную конфигурацию электросамолета. Диаметры винтов в каждом трехвинтовом модуле определяются по соотношению D=d×
1. Многовинтовой гибридный электроконвертоплан, содержащий планер из композитных материалов с трапециевидным крылом, на поворотных консолях которого смонтированы в мотогондолах двигатели с редукторами и винтами, создающими горизонтальную и соответствующим их отклонением вертикальную тягу, синхронизирующую Т-образную в плане систему валов трансмиссии, связывающую между собой два двигателя и их с рулевыми соосными винтами, смонтированными за Т-образным оперением на конце удлиненной балки, трехстоечное убирающееся колесное шасси, с носовой вспомогательной и главными опорами, убираемыми в носовой и бортовые отсеки, отличающийся тем, что на поворотных частях консолей крыла типа "чайка", имеющих по размаху разновеликие внутренние и внешние секции соответственно с положительным и отрицательным углом их поперечного V и оснащенных на нижней части изломов крыла гибридными мотогондолами трехвинтовых модулей, выполненных с возможностью работы при различных углах их отклонения в вертикальной плоскости, имеющих разновеликие тянущие винты, каждый левый и правый больший из которых, установленный в соответствующей гибридной мотогондоле с передним расположением силовой ее установки, вынесен вперед за переднюю кромку крыла и от плоскости вращения двух меньших винтов, размещенных ближе к передней кромке крыла и вокруг большего винта за внешним и внутренним его квадрантами по системе распределенной тяги разновеликих винтов (РТРВ) в соответствующих каплевидной формы мотогондолах с передним расположением электродвигателя, установленных на концах верхних и нижних пилонов, смонтированных соответственно сверху на больших внутренних и снизу на конце меньших внешних секций крыла таким образом, что при синхронном повороте их всех и создании ими вертикальной тяги передние внешние и задние внутренние меньшие винты, имеющие равновеликие расстояния от вертикальных осей их вращения до поперечной плоскости, проходящей через центр масс и вертикальные оси вращения больших винтов, располагающиеся с вертикальными осями меньших винтов в направлении полета в расходящейся V-образной конфигурации в плане относительно крыла, и снабжен возможностью изменения полетной его конфигурации с многовинтового гибридного электровертолета с шестью флюгерно-реверсивными несущими винтами, размещенными в двух поперечных системах РТРВ-(Х1+2), имея при этом ярусное расположение тянущих винтов, обеспечивают вертикальный взлет, посадку и висение при полной компенсации реактивных крутящих моментов от всех несущих винтов, имеющих противоположное направление вращения между левым и правым большими винтами трехвинтовых модулей, а также между меньшими винтами как в каждой левой и правой их паре, так и в каждой передней и задней их паре, но и при одинаковом направлении вращения между несущими винтами в каждой диагональной группе меньших винтов, в полетную конфигурацию электросамолета, позволяющего достичь первой или второй крейсерской скорости полета с двух- или четырехвинтовой движительной системой, соответственно с одной или двумя парами винтов в соответствующих трехвинтовых модулях, в каждом из которых больший или два меньших винта устанавливаются соответственно во флюгерное положение и последние из них, расположенные вокруг большего винта с межцентровым расстоянием от последнего, определяемым из соотношения: Aмр=(R+r), м (где Амр - межцентровое расстояние, R и r - радиусы большего и меньших винтов соответственно), но и обратно, при этом диаметры несущих винтов в каждом трехвинтовом модуле, определяемые из соотношения: D=d×
2. Многовинтовой гибридный электроконвертоплан по п.1, отличающийся тем, что с целью удвоения взлетного веса и полезной нагрузки при выполнении ВВП он выполнен по аэродинамической схеме тандем с вертикальным оперением и разновеликими крыльями, меньшее из которых с двумя системами РТРВ-(Х1+2), расположенными параллельно и ниже двух систем РТРВ-(Х1+2) большего крыла, при этом и передние, и задние поворотные системы с трехвинтовыми модулями, имеющими меньшие винты, смонтированные под соответствующим крылом так, что при соответствующем повороте их всех со всеми винтами, создающими подъемную силу всеми несущими винтами, имеющими равновеликие расстояния от вертикальных осей вращения всех винтов переднего и заднего крыльев до поперечной плоскости, проходящей через центр масс.
3. Многовинтовой гибридный электроконвертоплан по п.2, отличающийся тем, что с целью полуторакратного увеличения взлетного веса и полезной нагрузки при выполнении ВВП он в аэродинамической схеме трех высокорасположенных тандемных крыльев, имея наряду с разновеликими передним меньшим и средним большим крыльями с соответствующими четырьмя поворотными системами РТРВ-(Х1+2), оснащен задним крылом, равновеликим с передним, имеющим две поворотные системы РТРВ-(Х1+2), три левые и три правые из которых, размещенные так, что на внутренних секциях каждой консоли крыла, имеющих длину от узла их поворота до оси вращения большего винта, равновеликую сумме радиуса большего и диаметра меньшего винта, создают при соответствующем их повороте подъемную силу всеми несущими винтами, имеющими равновеликие расстояния от вертикальных осей вращения всех винтов переднего и заднего крыльев до поперечной плоскости, проходящей и через центр масс, и вертикальные оси вращения всех винтов среднего крыла.
| US 2013099065 A1, 25.04.2013 | |||
| WO 2012141736 A1, 18.10.2012 | |||
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2448869C1 |
| WO 2009069109 A2, 04.06.2009 | |||

