Изобретение относится к измерительной технике и может быть использовано при настройке тензорезисторной датчиковой аппаратуры с мостовой измерительной цепью по мультипликативной температурной погрешности.
Известен способ настройки тензорезисторных датчиков с мостовой измерительной цепью по мультипликативной температурной погрешности с учетом положительной нелинейности температурной характеристики выходного сигнала датчика [1], принятый за прототип, в котором для компенсации мультипликативной температурной погрешности вычисляют нелинейности ТКЧ мостовой цепи  , где
, где  и
и  - значения ТКЧ мостовой цепи при температурах t+ и t-, соответствующих верхнему и нижнему пределу рабочего диапазона температур. Если нелинейность ТКЧ мостовой цепи положительна, то включают термонезависимый резистор Ri в диагональ питания мостовой цепи. Вычисляют нелинейность ТКЧ мостовой цепи
- значения ТКЧ мостовой цепи при температурах t+ и t-, соответствующих верхнему и нижнему пределу рабочего диапазона температур. Если нелинейность ТКЧ мостовой цепи положительна, то включают термонезависимый резистор Ri в диагональ питания мостовой цепи. Вычисляют нелинейность ТКЧ мостовой цепи  , где
, где  и
и  - ТКЧ мостовой цепи при температурах t+ и t- после преобразования ТКЧ мостовой цепи. Проверяют принадлежность и
- ТКЧ мостовой цепи при температурах t+ и t- после преобразования ТКЧ мостовой цепи. Проверяют принадлежность и  области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи, которая приведена в прототипе как «область существования полной компенсации». При принадлежности и области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи вычисляют номинал термозависимого резистора Rα и термонезависимого резистора R∂, в выходную диагональ мостовой цепи включают резистор Rα, зашунтированный резистором R∂.
области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи, которая приведена в прототипе как «область существования полной компенсации». При принадлежности и области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи вычисляют номинал термозависимого резистора Rα и термонезависимого резистора R∂, в выходную диагональ мостовой цепи включают резистор Rα, зашунтированный резистором R∂.
К причинам, препятствующим достижению технического результата, указанного ниже, при использовании известного способа относится то, что способ основан на расчете компенсационных резисторов через физические параметры датчика (ТКЧ мостовой цепи после преобразования нелинейности ТКС мостовой цепи, ТКЧ тензорезисторов мостовой цепи, температурный коэффициенте сопротивления (ТКС) компенсационного термозависимого резистора, ТКС входного и выходного сопротивления мостовой цепи).
Как правило, данную информацию можно получить из сертификатов на применяемые материалы, однако существующие технологические разбросы при изготовлении этих материалов не позволяют использовать данную информацию из-за значительных разбросов, получаемых при определении значений компенсационных элементов. Кроме того, так как металлопленочные датчики выполняются с применением микроэлектронной технологии, данная информация может быть значительно искажена в результате напыления исходного материала. Поэтому, чтобы использовать аналитические выражения, необходимо осуществить экспериментальное определение требуемых параметров элементов, входящих в состав датчика, путем прямого измерения необходимых параметров.
Однако экспериментальное определение физических параметров элементов измерительной схемы датчика представляет определенную сложность.
Во-первых, это чисто конструктивные и технологические затруднения, связанные с тем, что:
- определение физических параметров как элементов измерительной схемы, так и компенсационных элементов необходимо проводить в собранном датчике, так как существующие перепады температур и температурных деформаций по телу датчика могут вызвать недопустимо большие погрешности при определении компенсационных элементов;
- определение всех физических параметров отдельных элементов требует, как правило, нарушения электрических связей в собранном датчике, что может привести к значительному ухудшению метрологических характеристик, так как эти связи заложены на самых ранних этапах формирования измерительной схемы металлопленочных датчиков.
Во-вторых, прямые методы измерения этих параметров, кроме большой трудоемкости, не обеспечивают требуемую точность. Так, при измерении ТКС тензорезисторов порядка 1·10-5 1/°С с точностью до 5% требуется замер сопротивления номиналом 1000 Ом при перепаде температур в 50°C с точностью до 0,025 Ома, что составляет точность измерения 0,0025% и требует применения специальных методов измерения.
Сущность изобретения заключается в следующем.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа настройки тензорезисторных датчиков с мостовой измерительной цепью по мультипликативной температурной погрешности, который позволил бы повысить точность компенсации мультипликативной температурной погрешности с учетом положительной нелинейности температурной характеристики выходного сигнала датчика с использованием широко распространенной измерительной аппаратуры.
Технический результат заключается в повышении точности компенсации мультипликативной температурной погрешности с учетом положительной нелинейности температурной характеристики выходного сигнала датчика с использованием широко распространенной измерительной аппаратуры.
Допустим, что оценку параметров датчика производят косвенным путем через измерение выходного сигнала, и относительное изменение сопротивления тензорезисторов при номинальном значении измеряемого параметра составляет  , где Rj=1000 Ом - сопротивление j-го плеча мостовой цепи датчика, ΔRj - изменение сопротивления плеча Rj от воздействия измеряемого параметра при номинальном его значении. Данный выходной сигнал соответствует суммарному изменению сопротивлений плеч мостовой цепи
, где Rj=1000 Ом - сопротивление j-го плеча мостовой цепи датчика, ΔRj - изменение сопротивления плеча Rj от воздействия измеряемого параметра при номинальном его значении. Данный выходной сигнал соответствует суммарному изменению сопротивлений плеч мостовой цепи  . В этом случае для обеспечения замера суммарного изменения сопротивлений плеч мостовой цепи в 10 Ом с точностью 0,025 Ом через измерение выходных сигналов потребуется использовать вольтметр класса точности не ниже 0,25%, что доступно в настоящее время на любом производстве.
. В этом случае для обеспечения замера суммарного изменения сопротивлений плеч мостовой цепи в 10 Ом с точностью 0,025 Ом через измерение выходных сигналов потребуется использовать вольтметр класса точности не ниже 0,25%, что доступно в настоящее время на любом производстве.
Указанный технический результат при осуществлении изобретения достигается тем, что при положительной нелинейности температурной характеристики выходного сигнала датчика производят компенсацию мультипликативной температурной погрешности в два этапа:
1) преобразуют положительную нелинейность ТКЧ мостовой цепи Δα∂ou в отрицательную, включая термонезависимый резистор Ri, в диагональ питания мостовой цепи;
2) осуществляют последующую компенсацию мультипликативной температурной погрешности с учетом полученной отрицательной нелинейности ТКЧ мостовой цепи  , включая в выходную диагональ мостовой цепи термозависимый резистор Rα, зашунтированный термонезависимым резистором R∂.
, включая в выходную диагональ мостовой цепи термозависимый резистор Rα, зашунтированный термонезависимым резистором R∂.
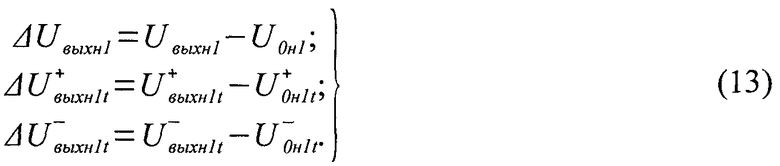
Для этого датчик подключают к высокоомной нагрузке Rн>500 кОм. Измеряют значения начального разбаланса датчика  при нормальной температуре t0 и температурах t+ и t-, соответствующих верхнему и нижнему пределу рабочего диапазона температур. Измеряют значения выходного сигнала датчика
при нормальной температуре t0 и температурах t+ и t-, соответствующих верхнему и нижнему пределу рабочего диапазона температур. Измеряют значения выходного сигнала датчика  при номинальном значении измеряемого параметра и температурах t0, t+ и t-. Вычисляют девиации выходного сигнала датчика
при номинальном значении измеряемого параметра и температурах t0, t+ и t-. Вычисляют девиации выходного сигнала датчика  , соответствующие температурам t0, t+ и t-. На основе полученных значений девиаций выходного сигнала вычисляют значения ТКЧ мостовой цепи датчика, соответствующие температурам t+ и t-:
, соответствующие температурам t0, t+ и t-. На основе полученных значений девиаций выходного сигнала вычисляют значения ТКЧ мостовой цепи датчика, соответствующие температурам t+ и t-:
где  - ТКЧ мостовой цепи датчика при температуре t+;
- ТКЧ мостовой цепи датчика при температуре t+;
 - ТКЧ мостовой цепи датчика при температуре t-;
- ТКЧ мостовой цепи датчика при температуре t-;
Δt+=t+-t0 - положительный диапазон температур;
Δt-=t--t0 - отрицательный диапазон температур.
Вычисляют нелинейность ТКЧ мостовой цепи датчика  . Если нелинейность ТКЧ мостовой цепи является положительной, то преобразовывают положительную нелинейность ТКЧ мостовой цепи в отрицательную.
. Если нелинейность ТКЧ мостовой цепи является положительной, то преобразовывают положительную нелинейность ТКЧ мостовой цепи в отрицательную.
1) Для преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную предварительно определяют значения ТКС входного сопротивления мостовой цепи датчика при температурах t+ и t-. Для этого измеряют входное сопротивление мостовой цепи датчика Rвх. В диагональ питания мостовой цепи включают термонезависимый технологический резистор с номиналом Rm=0,5·Rвх. Измеряют значения выходного сигнала датчика при номинальном значении измеряемого параметра и температурах t0, t+ и t-. Вычисляют девиации выходного сигнала датчика , соответствующие температурам t0, t+ и t-. На основе полученных значений девиаций выходного сигнала вычисляют значения ТКС входного сопротивления, соответствующие температурам t+ и t-:
где  - ТКС входного сопротивления при температуре t+;
- ТКС входного сопротивления при температуре t+;
 - ТКС входного сопротивления при температуре t-.
- ТКС входного сопротивления при температуре t-.
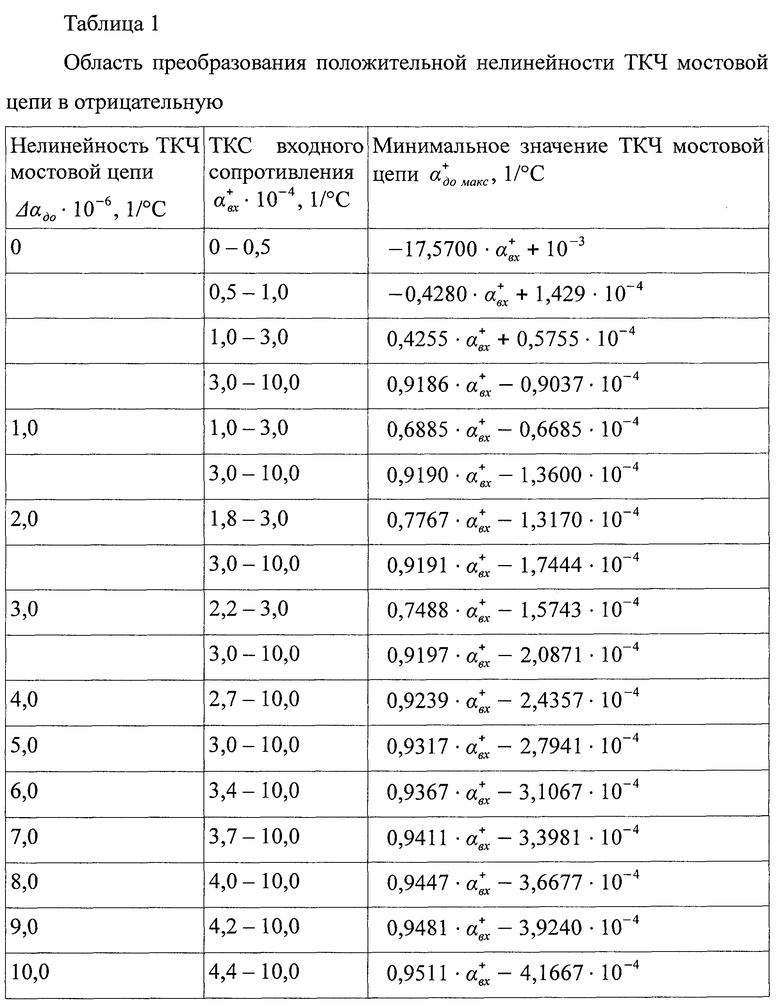
На основе вычисленных значений физических параметров датчика производят проверку принадлежности и  области преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную, заданной таблицей 1.
области преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную, заданной таблицей 1.
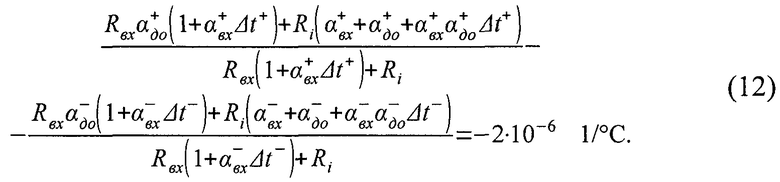
При принадлежности  и области преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную вычисляют номинал термонезависимого резистора Ri, решая уравнение:
и области преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную вычисляют номинал термонезависимого резистора Ri, решая уравнение:
В диагональ питания мостовой цепи включают термонезависимый резистор Ri с вычисленным номиналом.
2) Производят компенсацию мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи  . Для этого предварительно определяют значения физических параметров датчика после преобразования нелинейности ТКЧ мостовой цепи косвенными методами на основе измерения выходного сигнала датчика в различных условиях:
. Для этого предварительно определяют значения физических параметров датчика после преобразования нелинейности ТКЧ мостовой цепи косвенными методами на основе измерения выходного сигнала датчика в различных условиях:
а) Измеряют выходное сопротивление мостовой цепи датчика Rвых. Датчик подключают к низкоомной нагрузке Rн=2·Rвых, в выходную диагональ мостовой цепи включают термозависимый технологический резистор Rαm, номинал которого больше, чем необходимо для компенсации мультипликативной погрешности, например для металлопленочных датчиков следует брать Rαm=Rвых. Измеряют значения начального разбаланса датчика  при температурах t0, t+ и t-. Измеряют значения выходного сигнала датчика
при температурах t0, t+ и t-. Измеряют значения выходного сигнала датчика  при номинальном значении измеряемого параметра и температурах t0, t+ и t-. Вычисляют девиации выходного сигнала датчика
при номинальном значении измеряемого параметра и температурах t0, t+ и t-. Вычисляют девиации выходного сигнала датчика  , соответствующие температурам t0, t+ и t-.
, соответствующие температурам t0, t+ и t-.
б) Резистор Rαm шунтируют термонезависимым резистором Rш1=1,25·Rαm. Измеряют значения начального разбаланса датчика  при температурах t0, t+ и t-. Измеряют значения выходного сигнала датчика
при температурах t0, t+ и t-. Измеряют значения выходного сигнала датчика  при номинальном значении измеряемого параметра и температурах t0, t+ и t-. Вычисляют девиации выходного сигнала датчика
при номинальном значении измеряемого параметра и температурах t0, t+ и t-. Вычисляют девиации выходного сигнала датчика  , соответствующие температурам t0, t+ и t-.
, соответствующие температурам t0, t+ и t-.
в) резистор Rш1 заменяют термонезависимым резистором Rш2=0,25·Rαm. Измеряют значения начального разбаланса датчика  при температурах t0, t+ и t-. Измеряют значения выходного сигнала датчика
при температурах t0, t+ и t-. Измеряют значения выходного сигнала датчика  при номинальном значении измеряемого параметра и температурах t0, t+ и t-. Вычисляют девиации выходного сигнала датчика
при номинальном значении измеряемого параметра и температурах t0, t+ и t-. Вычисляют девиации выходного сигнала датчика , соответствующие температурам t0, t+ и t-.
, соответствующие температурам t0, t+ и t-.
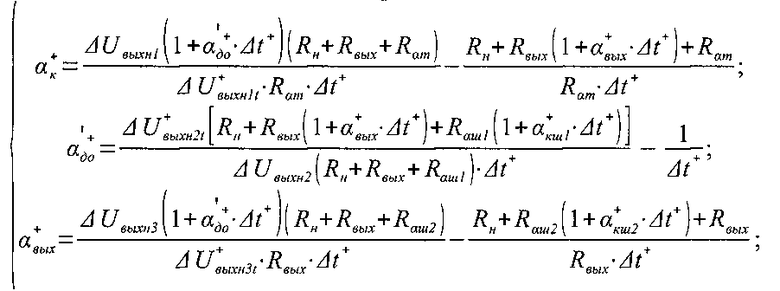
Вычисляют ТКЧ мостовой цепи после преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную, ТКС выходного сопротивления мостовой цепи, ТКС резистора Rαmвых на основе полученных значений девиаций выходного сигнала датчика, решая системы уравнений:
где  - ТКС выходного сопротивления мостовой цепи при температуре t+;
- ТКС выходного сопротивления мостовой цепи при температуре t+;
 - ТКС выходного сопротивления мостовой цепи при температуре t-;
- ТКС выходного сопротивления мостовой цепи при температуре t-;
 - ТКС резистора Rαm при температуре t+;
- ТКС резистора Rαm при температуре t+;
 - ТКС резистора Rαm при температуре t-.
- ТКС резистора Rαm при температуре t-.
На основе вычисленных значений физических параметров датчика производят проверку принадлежности  и
и  области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи, заданной системой неравенств (31). При принадлежности и области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи вычисляют номиналы термозависимого резистора Rα и термонезависимого резистора R∂. Заменяют резистор Rαm резистором Rα с вычисленным номиналом, зашунтированным термонезависимым резистором R∂.
области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи, заданной системой неравенств (31). При принадлежности и области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи вычисляют номиналы термозависимого резистора Rα и термонезависимого резистора R∂. Заменяют резистор Rαm резистором Rα с вычисленным номиналом, зашунтированным термонезависимым резистором R∂.
Кроме того, после вычисления номиналов компенсационных резисторов Rα и R∂ включают термозависимый резистор Rα с вычисленным номиналом путем частичного задействования технологического резистора Rαm, поскольку при замене резистора Rαm на резистор Rα с вычисленным номиналом технологически очень трудно обеспечить равенство ТКС резисторов Rαm и Rα.
Способ осуществляется следующим образом.
Для решения поставленной выше задачи необходимо заменить прямое измерение физических параметров датчика на косвенное, основанное на измерении выходного сигнала датчика.
Данное решение позволит упростить настройку датчика, решить приведенные выше конструктивные и технологические затруднения. Кроме того, данное решение позволит повысить точность определения физических параметров датчика и, как следствие, компенсации мультипликативной температурной погрешности.
На основе измерения выходного сигнала датчика необходимо вычислить значения физических параметров тензорезисторного датчика, необходимых при вычислении номиналов компенсационных резисторов, что требует высокоточной измерительной аппаратуры в случае прямого измерения.
Как показано в прототипе, при компенсации мультипликативной температурной погрешности необходимы значения различных физических величин в процессе компенсации мультипликативной температурной погрешности:
1) при оценке нелинейности температурной характеристики выходного сигнала датчика используются сведения о ТКЧ мостовой цепи  и его нелинейности Δα∂o;
и его нелинейности Δα∂o;
2) при проверке возможности применения резистора Ri для преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную и вычислении номинала резистора Ri необходимы сведения о ТКЧ тензорезисторов, включенных в мостовую цепь, ТКС входного сопротивления мостовой цепи при температурах t+ и t-;
3) при проверке возможности компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи путем включения резисторов Rα и R∂ в выходную диагональ мостовой цепи и вычислении номиналов резисторов Rα и R∂ используются значения ТКЧ мостовой цепи  , ТКС выходного сопротивления мостовой цепи и термозависимого резистора Rα при температурах t+ и t-.
, ТКС выходного сопротивления мостовой цепи и термозависимого резистора Rα при температурах t+ и t-.
I. Рассмотрим косвенное измерение ТКЧ мостовой  цепи и его нелинейности Δα∂ou, необходимых при первоначальной оценке нелинейности температурной характеристики выходного сигнала датчика.
цепи и его нелинейности Δα∂ou, необходимых при первоначальной оценке нелинейности температурной характеристики выходного сигнала датчика.
Для оценки ТКЧ мостовой цепи  датчик подключают к высокоомной нагрузке Rн>500 кОм при отсутствии резисторов в диагонали питания и подключении датчика. Измеряют значения как начального разбаланса
датчик подключают к высокоомной нагрузке Rн>500 кОм при отсутствии резисторов в диагонали питания и подключении датчика. Измеряют значения как начального разбаланса  , так и выходного сигнала датчика
, так и выходного сигнала датчика  при номинальном значении измеряемого параметра, соответствующие температурам t0, t+, t- (U0, Uвых соответствуют температуре t0,
при номинальном значении измеряемого параметра, соответствующие температурам t0, t+, t- (U0, Uвых соответствуют температуре t0,  - температуре t+;
- температуре t+;  - температуре t-). На основе сведений о значениях начального разбаланса и выходного сигнала вычисляют значения девиаций выходных сигналов
- температуре t-). На основе сведений о значениях начального разбаланса и выходного сигнала вычисляют значения девиаций выходных сигналов  при температурах t0, t+, t-:
при температурах t0, t+, t-:
В соответствии с [2], девиации выходных сигналов при температурах t0, t+, t- могут быть представлены следующим образом:



где Unum - напряжение питания мостовой цепи;
 - коэффициент симметрии мостовой цепи;
- коэффициент симметрии мостовой цепи;
 - ТКЧ мостовой цепи при температуре t+;
- ТКЧ мостовой цепи при температуре t+;
 - ТКЧ мостовой цепи при температуре t-.
- ТКЧ мостовой цепи при температуре t-.
Разделив выражение (4) и (3) на (2), решив полученные уравнения относительно ТКЧ мостовой цепи ( и
и  ), получим выражения для вычисления ТКЧ мостовой цепи:
), получим выражения для вычисления ТКЧ мостовой цепи:
Значение нелинейности ТКЧ мостовой цепи, необходимое при выборе схемы компенсации мультипликативной температурной погрешности, вычисляют на основе измеренных значений ТКЧ мостовой цепи по формуле:

После вычисления Δα∂o проверяют ее знак. При положительном значении Δα∂o приступают к преобразованию положительного значения Δα∂o в отрицательное. Для этого определяют значения физических параметров датчика, необходимых для преобразования нелинейности ТКЧ мостовой цепи.
II. Рассмотрим оценку физических параметров, необходимых при проверке возможности применения резистора Ri для преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную и вычислении номинала резистора Ri (ТКЧ тензорезисторов, ТКС входного сопротивления).
1) Поскольку в диагонали питания отсутствуют резисторы и датчик подключен к высокоомной нагрузке, то ТКЧ тензорезисторов, включенных в мостовую цепь, определяет значение ТКЧ мостовой цепи ( ,
,  ). По этой причине можно считать ТКЧ тензорезисторов, включенных в мостовую цепь, равным ТКЧ мостовой цепи и использовать значения , при расчете номиналов резисторов Rαвх и R∂вх.
). По этой причине можно считать ТКЧ тензорезисторов, включенных в мостовую цепь, равным ТКЧ мостовой цепи и использовать значения , при расчете номиналов резисторов Rαвх и R∂вх.
2) Для оценки ТКС входного сопротивления после вычисления Δα∂o измеряют входное сопротивление мостовой цепи датчика Rвх, в цепь питания включают термонезависимый технологический резистор Rm. Благодаря включению резистора Rm в диагональ питания будет получен выходной сигнал, зависящий от ТКЧ тензорезисторов, включенных в мостовую цепь, и ТКС входного сопротивления мостовой цепи. Номинал резистора Rm следует брать равным Rm=0,5·Rвх, поскольку при данном номинале резистора Rm влияние ТКС входного сопротивления будет достаточно большим, а уменьшение выходного напряжения мостовой цепи не превысит 33,34%.
Измеряют значения как начального разбаланса  , так и выходного сигнала датчика
, так и выходного сигнала датчика  при номинальном значении измеряемого параметра, соответствующие температурам t0, t+, t- (U0r, Uвыхr соответствуют температуре t0;
при номинальном значении измеряемого параметра, соответствующие температурам t0, t+, t- (U0r, Uвыхr соответствуют температуре t0;  - температуре t+;
- температуре t+;  - температуре t-). На основе сведений о значениях начального разбаланса и выходного сигнала вычисляют значения девиаций выходных сигналов
- температуре t-). На основе сведений о значениях начального разбаланса и выходного сигнала вычисляют значения девиаций выходных сигналов  при температурах t0, t+, t-:
при температурах t0, t+, t-:

В соответствии с [2], девиации выходных сигналов после включения резистора Ri при температурах t0, t+, t-:



где  - значение ТКС входного сопротивления мостовой цепи при температуре t+;
- значение ТКС входного сопротивления мостовой цепи при температуре t+;
 - значение ТКС входного сопротивления мостовой цепи при температуре t-.
- значение ТКС входного сопротивления мостовой цепи при температуре t-.
Разделив выражение (9) и (10) на (8), решив полученные уравнения относительно ТКС входного сопротивления с учетом (5), получим выражения для вычисления ТКС входного сопротивления:
После вычисления значений как  и Δα∂o, так и ТКС входного сопротивления при температурах t+ и t- проверяют принадлежность
и Δα∂o, так и ТКС входного сопротивления при температурах t+ и t- проверяют принадлежность  и Δα∂o области преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную, которая в соответствии с [1] задана максимальным значением ТКЧ мостовой цепи, приведенным в таблице 1.
и Δα∂o области преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную, которая в соответствии с [1] задана максимальным значением ТКЧ мостовой цепи, приведенным в таблице 1.
При принадлежности  и Δα∂o области преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную вычисляют номинал резистора Ri в соответствии с [1], решая уравнение:
и Δα∂o области преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную вычисляют номинал резистора Ri в соответствии с [1], решая уравнение:
После вычисления номинала резистора Ri в диагональ питания включают термонезависимый резистор Ri с вычисленным сопротивлением.
III. Рассмотрим компенсацию мультипликативной температурной погрешности с учетом полученной отрицательной нелинейности ТКЧ мостовой цепи с косвенной оценкой физических параметров датчика после преобразования нелинейности ТКЧ мостовой цепи.
Для оценки как ТКЧ мостовой цепи ( и
и  ), так и ТКС выходного сопротивления мостовой цепи датчика, резистора Rαm измеряют выходное сопротивление мостовой цепи Rвых, датчик подключают к низкоомной термонезависимой нагрузке, сопротивление которой составляет Rн=2·Rвых. В выходную диагональ мостовой цепи включают термозависимый технологический резистор Rαmвых, номинал которого больше, чем необходимо для компенсации мультипликативной температурной погрешности. В случае металлопленочных датчиков следует использовать резистор Rαmвых=Rвых. Включение резистора Rαmвых, подключение мостовой цепи к низкоомной нагрузке Rн позволит получить выходной сигнал, зависящий как от ТКЧ мостовой цепи (
), так и ТКС выходного сопротивления мостовой цепи датчика, резистора Rαm измеряют выходное сопротивление мостовой цепи Rвых, датчик подключают к низкоомной термонезависимой нагрузке, сопротивление которой составляет Rн=2·Rвых. В выходную диагональ мостовой цепи включают термозависимый технологический резистор Rαmвых, номинал которого больше, чем необходимо для компенсации мультипликативной температурной погрешности. В случае металлопленочных датчиков следует использовать резистор Rαmвых=Rвых. Включение резистора Rαmвых, подключение мостовой цепи к низкоомной нагрузке Rн позволит получить выходной сигнал, зависящий как от ТКЧ мостовой цепи ( и
и  ), так и ТКС выходного сопротивления мостовой цепи и ТКС резистора Rαmвых. В выходной диагонали должны отсутствовать резисторы.
), так и ТКС выходного сопротивления мостовой цепи и ТКС резистора Rαmвых. В выходной диагонали должны отсутствовать резисторы.
Измеряют значения как начального разбаланса  , так и выходного сигнала датчика
, так и выходного сигнала датчика  при номинальном значении измеряемого параметра, соответствующие температурам t0, t+, t- (U0н1, Uвыхн1 соответствуют температуре t0;
при номинальном значении измеряемого параметра, соответствующие температурам t0, t+, t- (U0н1, Uвыхн1 соответствуют температуре t0;  ,
,  - температуре t+;
- температуре t+;  ,
,  - температуре t-). На основе сведений о значениях начального разбаланса и выходного сигнала вычисляют значения девиаций выходных сигналов
- температуре t-). На основе сведений о значениях начального разбаланса и выходного сигнала вычисляют значения девиаций выходных сигналов  при температурах t0, t+, t-:
при температурах t0, t+, t-:
В соответствии с [2] девиации выходных сигналов при температурах t0, t+, t- могут быть представлены следующим образом:



где Uxx - выходное напряжение мостовой цепи в режиме холостого хода (при сопротивлении нагрузки Rн>500 кОм);
 - ТКС выходного сопротивления мостовой цепи датчика при температуре t+;
- ТКС выходного сопротивления мостовой цепи датчика при температуре t+;
 - ТКС выходного сопротивления мостовой цепи датчика при температуре t-;
- ТКС выходного сопротивления мостовой цепи датчика при температуре t-;
 - ТКС резистора Rαm при температуре t+;
- ТКС резистора Rαm при температуре t+;
 - ТКС резистора Rαm при температуре t-;
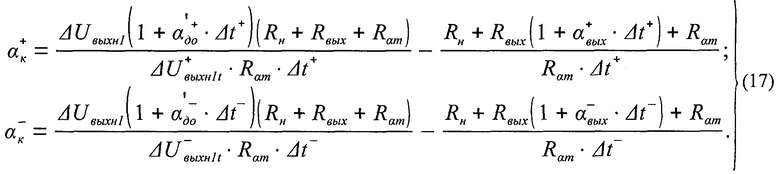
- ТКС резистора Rαm при температуре t-;
Разделив выражение (15) и (16) на (14) и решив полученные уравнения относительно и получим выражения для вычисления ТКС резистора Rαm:
Шунтируют технологический термозависимый резистор Rαm термонезависимым резистором Rш1. Желательно выбирать номинал шунта равным Rш1=1,25·Rαm, что позволит изменить выходной сигнал на 12,5%.
Измеряют значения как начального разбаланса  , так и выходного сигнала датчика
, так и выходного сигнала датчика  при номинальном значении измеряемого параметра, соответствующие температурам t0, t+, t- (U0н2, Uвыхн2 соответствуют температуре t0;
при номинальном значении измеряемого параметра, соответствующие температурам t0, t+, t- (U0н2, Uвыхн2 соответствуют температуре t0;  - температуре t+;
- температуре t+;  ,
,  - температуре t-). На основе сведений о значениях начального разбаланса и выходного сигнала вычисляют значения девиаций выходных сигналов
- температуре t-). На основе сведений о значениях начального разбаланса и выходного сигнала вычисляют значения девиаций выходных сигналов  при температурах t0, t+, t-:
при температурах t0, t+, t-:

Девиации датчика при работе на низкоомную нагрузку Rн также могут быть представлены аналогично выражениям (14)-(16):



где  - сопротивление резистора Rαm, зашунтированного резистором Rш1;
- сопротивление резистора Rαm, зашунтированного резистором Rш1;
 - ТКС резистора Rαm, зашунтированного резистором Rш1, при температуре t+,
- ТКС резистора Rαm, зашунтированного резистором Rш1, при температуре t+,
 - ТКС резистора Rαm, зашунтированного резистором Rш1, при температуре t-.
- ТКС резистора Rαm, зашунтированного резистором Rш1, при температуре t-.
Разделив выражение (20) и (21) на (19) и решив полученные уравнения относительно  и
и  получим выражения для вычисления ТКЧ мостовой цепи после преобразования нелинейности ТКЧ мостовой цепи:
получим выражения для вычисления ТКЧ мостовой цепи после преобразования нелинейности ТКЧ мостовой цепи:
Заменяют резистор Rш1 термонезависимым резистором Rш2. Желательно выбирать номинал шунта Rш2 равным Rш2=0,25·Rαm, что позволит изменить выходной сигнал на 25%.
Измеряют значения как начального разбаланса  , так и выходного сигнала датчика
, так и выходного сигнала датчика  при номинальном значении измеряемого параметра, соответствующие температурам t0, t+, t- (
при номинальном значении измеряемого параметра, соответствующие температурам t0, t+, t- ( соответствуют температуре t0;
соответствуют температуре t0;  - температуре t+;
- температуре t+;  - температуре t-). На основе сведений о значениях начального разбаланса и выходного сигнала вычисляют значения девиаций выходных сигналов
- температуре t-). На основе сведений о значениях начального разбаланса и выходного сигнала вычисляют значения девиаций выходных сигналов  при температурах t0, t+, t-:
при температурах t0, t+, t-:
Девиации датчика при работе на низкоомную нагрузку Rн также могут быть представлены аналогично выражениям (14)-(16):



где  - сопротивление резистора Rαm, зашунтированного резистором Rш2;
- сопротивление резистора Rαm, зашунтированного резистором Rш2;
 - ТКС резистора Rαm, зашунтированного резистором Rш2, при температуре t+;
- ТКС резистора Rαm, зашунтированного резистором Rш2, при температуре t+;
 - ТКС резистора Rαm, зашунтированного резистором Rш2, при температуре t-.
- ТКС резистора Rαm, зашунтированного резистором Rш2, при температуре t-.
Разделив выражение (25) и (26) на (24) и решив полученные уравнения относительно  и
и  получим выражения для вычисления ТКС выходного сопротивления мостовой цепи:
получим выражения для вычисления ТКС выходного сопротивления мостовой цепи:
На основе зависимостей (17), (22), (27) получим систему уравнений для вычисления значений  :
:

С учетом полученных значений  вычисляют нелинейность ТКЧ мостовой цепи по формуле:
вычисляют нелинейность ТКЧ мостовой цепи по формуле:

После оценки ТКЧ мостовой цепи ( и
и  ), ТКС выходного сопротивления и ТКС технологического резистора Rαm проверяют принадлежность и
), ТКС выходного сопротивления и ТКС технологического резистора Rαm проверяют принадлежность и  области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи, которая в соответствии с [1] определяется системой:
области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи, которая в соответствии с [1] определяется системой:

Если  и
и  удовлетворяют системе неравенств (37), то по аналогии с прототипом вычисляют номинал термозависимого резистора Rαвых и термонезависимого резистора R∂вых, решая систему уравнений:
удовлетворяют системе неравенств (37), то по аналогии с прототипом вычисляют номинал термозависимого резистора Rαвых и термонезависимого резистора R∂вых, решая систему уравнений:
После вычисления номиналов резисторов Rα и R∂ производят замену технологического резистора Rαm термозависимым компенсационным резистором Rα с вычисленным номиналом путем частичного задействования резистора Rαm. Шунтируют термозависимый резистор Rα термонезависимым резистором R∂ с вычисленным номиналом.
Для проверки описанного способа произведем расчет компенсационных резисторов и мультипликативной температурной погрешности после компенсации.
Пример
Необходимо произвести компенсацию мультипликативной температурной погрешности с учетом нелинейности температурной характеристики выходного сигнала тензорезисторного датчика с равноплечей мостовой измерительной цепью при следующих исходных данных:
- Входное сопротивление мостовой цепи: Rвх=1000 Ом;
- Выходное сопротивление мостовой цепи: Rвых=1000 Ом;
- Напряжение питания мостовой цепи: Unum=10 В;
- Суммарное относительное изменение сопротивления тензорезисторов при номинальном значении измеряемой физической величины:  ;
;
- Коэффициент симметрии мостовой цепи: k=1;
- Температурный диапазон эксплуатации датчика: 20±100°С.
Рассмотрим осуществление компенсации, выполненное в несколько этапов.
Первый этап. Датчик подключают к высокоомной нагрузке Rн>500 кОм. Для последующей оценки ТКЧ мостовой цепи  и его нелинейности Δα∂o измеряют девиации выходных сигналов датчика
и его нелинейности Δα∂o измеряют девиации выходных сигналов датчика  . Для оценки реальных значений девиаций выходных сигналов микроэлектронного датчика зададимся значениями физических параметров датчика. Допустим, что
. Для оценки реальных значений девиаций выходных сигналов микроэлектронного датчика зададимся значениями физических параметров датчика. Допустим, что  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Измеряют девиации выходных сигналов датчика при температурах t0, t+, t-. В соответствии с (2)-(4) будут измерены следующие значения девиаций выходного сигнала датчика:



Второй этап. Проверяют знак нелинейности ТКЧ мостовой цепи Δα∂ou. В соответствии с (5) будут вычислены следующие значения ТКЧ мостовой цепи:
где  ,
,  - вычисленные значения ТКЧ мостовой цепи при температурах t+, t- соответственно.
- вычисленные значения ТКЧ мостовой цепи при температурах t+, t- соответственно.
В соответствии с (6) вычисленное значение нелинейность ТКЧ мостовой цепи составит:

где Δα∂ou - вычисленное значение нелинейности ТКЧ мостовой цепи.
Поскольку полученное значение нелинейности ТКЧ мостовой цепи Δα∂ou является положительным, то принимают решение о необходимости преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную.
Третий этап. Измеряют девиации выходных сигналов  , для вычисления значений ТКС входного сопротивления мостовой цепи при температурах t+ и t-, необходимых для выбора схемы преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную и расчета номинала компенсационного резистора Ri.
, для вычисления значений ТКС входного сопротивления мостовой цепи при температурах t+ и t-, необходимых для выбора схемы преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную и расчета номинала компенсационного резистора Ri.
Для последующей оценки ТКС входного сопротивления включают в диагональ питания мостовой цепи термонезависимый технологический резистор Rm=0,5·Rвх=500 Ом. Измеряют девиации выходного сигнала датчика при температурах t0, t+, t-. В соответствии с (8)-(10) измеренные значения девиаций выходного сигнала датчика примут значения:

Четвертый этап. Вычисляют значения ТКС входного сопротивления мостовой цепи, необходимые для выбора схемы преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную и вычисления номиналов компенсационных резисторов.
В соответствии с (11) вычисленные значения ТКС входного сопротивления мостовой цепи при температурах t+, t- составят:
где  ,
,  - вычисленные значения ТКС входного сопротивления мостовой цепи при температурах t+, t- соответственно.
- вычисленные значения ТКС входного сопротивления мостовой цепи при температурах t+, t- соответственно.
Пятый этап. Производят выбор схемы для преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную и рассчитывают номинал компенсационных резисторов.
Для этого проверяют принадлежность ТКЧ мостовой цепи  и его нелинейности Δα∂ou области преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную путем включения термозависимого резистора. Учитывая, что
и его нелинейности Δα∂ou области преобразования положительной нелинейности ТКЧ мостовой цепи в отрицательную путем включения термозависимого резистора. Учитывая, что  ,
,  ,
,  , в соответствии с таблицей 1 преобразование положительной нелинейности ТКЧ мостовой цепи в отрицательную с использованием резистора Ri возможно при условии:
, в соответствии с таблицей 1 преобразование положительной нелинейности ТКЧ мостовой цепи в отрицательную с использованием резистора Ri возможно при условии:

Поскольку  меньше 13,678·10-41/°С, то принимают решение о преобразовании положительной нелинейности ТКЧ мостовой цепи в отрицательную путем включения резистора Ri в диагональ питания.
меньше 13,678·10-41/°С, то принимают решение о преобразовании положительной нелинейности ТКЧ мостовой цепи в отрицательную путем включения резистора Ri в диагональ питания.
Номинал резистора Ri вычисляют, решая уравнение (12):

Решением уравнения (12) является значение номинала резистора Ri=133,168 Ом.
Заменяют технологический резистор Rm термонезависимым резистором Ri с вычисленным номиналом.
Шестой этап. Для последующей оценки физических параметров датчика после включения резистора Ri измеряют девиации выходных сигналов  .
.
Для этого датчик подключают к низкоомной нагрузке Rн=2·Rвых=2 кОм. В выходную диагональ мостовой цепи устанавливают резистор Rαm=Rвых=1000 Ом. Измеряют девиации выходного сигнала датчика при температурах t0, t+, t-. В соответствии с (14)-(16) будут измерены следующие значения девиаций выходного сигнала датчика:
Шунтируют технологический термозависимый резистор Rαm термонезависимым резистором Rш1=1250 Ом. Измеряют девиации выходного сигнала датчика при температурах t0, t+, t-. В соответствии с (19)-(21) будут измерены следующие значения девиаций выходного сигнала датчика:

где  - сопротивление резистора Rαm, зашунтированного резистором Rш1;
- сопротивление резистора Rαm, зашунтированного резистором Rш1;
 - сопротивление резистора Rαm, зашунтированного резистором Rш1, при t+=120°С;
- сопротивление резистора Rαm, зашунтированного резистором Rш1, при t+=120°С;
 - сопротивление резистора Rαm, зашунтированного резистором Rш1 при t-=-80°С.
- сопротивление резистора Rαm, зашунтированного резистором Rш1 при t-=-80°С.
Заменяют резистор Rш1 термозависимым резистором Rш2=250 Ом. Измеряют девиации выходного сигнала датчика при температурах t0, t+, t-. В соответствии с (24)-(26) будут измерены следующие значения девиаций выходного сигнала датчика:

где  - сопротивление резистора Rαm, зашунтированного резистором Rш1;
- сопротивление резистора Rαm, зашунтированного резистором Rш1;
 - сопротивление резистора Rαm, зашунтированного резистором Rш1 при t+=120°С;
- сопротивление резистора Rαm, зашунтированного резистором Rш1 при t+=120°С;
 - сопротивление резистора Rαm, зашунтированного резистором Rш1 при t-=-80°C.
- сопротивление резистора Rαm, зашунтированного резистором Rш1 при t-=-80°C.
Седьмой этап. На основе результатов измерения девиаций выходных сигналов  ,
,  вычисляют значения физических параметров датчика после преобразования нелинейности ТКЧ мостовой цепи.
вычисляют значения физических параметров датчика после преобразования нелинейности ТКЧ мостовой цепи.
Значения ТКС выходного сопротивления мостовой цепи и резистора Rαm, ТКЧ мостовой цепи после преобразования нелинейности ТКЧ мостовой цепи вычисляют, решая системы уравнений (28) и (29):

где  - вычисленные значения ТКС резистора Rαm при температурах t+, t- соответственно;
- вычисленные значения ТКС резистора Rαm при температурах t+, t- соответственно;
 - вычисленные значения ТКЧ мостовой цепи после преобразования нелинейности ТКЧ мостовой цепи при температурах t+, t- соответственно;
- вычисленные значения ТКЧ мостовой цепи после преобразования нелинейности ТКЧ мостовой цепи при температурах t+, t- соответственно;
 - вычисленные значения ТКС выходного сопротивления мостовой цепи при температурах t+, t- соответственно.
- вычисленные значения ТКС выходного сопротивления мостовой цепи при температурах t+, t- соответственно.
 - значение сопротивления резистора Rαm, зашунтированного резистором Rш1, вычисленное при решении системы уравнений (28) и (29);
- значение сопротивления резистора Rαm, зашунтированного резистором Rш1, вычисленное при решении системы уравнений (28) и (29);
 - вычисленное значение ТКС резистора Rαm, зашунтированного резистором Rш1, при температуре t+;
- вычисленное значение ТКС резистора Rαm, зашунтированного резистором Rш1, при температуре t+;
 - ТКС резистора Rαm, зашунтированного резистором Rш1, при температуре t-;
- ТКС резистора Rαm, зашунтированного резистором Rш1, при температуре t-;
 - значение сопротивления резистора Rαm, зашунтированного резистором Rш2, вычисленное при решении системы уравнений (28) и (29);
- значение сопротивления резистора Rαm, зашунтированного резистором Rш2, вычисленное при решении системы уравнений (28) и (29);
 - ТКС резистора Rαm, зашунтированного резистором Rш2, при температуре t+;
- ТКС резистора Rαm, зашунтированного резистором Rш2, при температуре t+;
 - ТКС резистора Rαm, зашунтированного резистором Rш2, при температуре t-.
- ТКС резистора Rαm, зашунтированного резистором Rш2, при температуре t-.
Решением систем уравнений (28) и (29) являются следующие значения физических параметров датчиков:






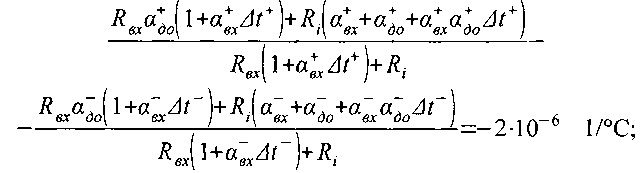
Вычисленное значение нелинейности ТКЧ мостовой цепи после преобразования нелинейности ТКЧ мостовой цепи составляет  .
.
Восьмой этап. Проверяют принадлежность  и
и  области компенсации мультипликативной температурной погрешности с учетом отрицательного значения нелинейности ТКЧ мостовой цепи. Учитывая, что
области компенсации мультипликативной температурной погрешности с учетом отрицательного значения нелинейности ТКЧ мостовой цепи. Учитывая, что  ,
,  ,
,  , область компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи в соответствии с (31) определяется системой неравенств:
, область компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности ТКЧ мостовой цепи в соответствии с (31) определяется системой неравенств:

Поскольку  и
и  удовлетворяют данной системе неравенств, то компенсацию мультипликативной температурной погрешности можно произвести, включая в выходную диагональ мостовой цепи резисторы Rα и R∂. Принимают номинал нагрузки, как рекомендуется в [3], равным Rн=2·Rвых=2000 Ом и решают систему уравнений (32) относительно номиналов резисторов Rα и R∂:
удовлетворяют данной системе неравенств, то компенсацию мультипликативной температурной погрешности можно произвести, включая в выходную диагональ мостовой цепи резисторы Rα и R∂. Принимают номинал нагрузки, как рекомендуется в [3], равным Rн=2·Rвых=2000 Ом и решают систему уравнений (32) относительно номиналов резисторов Rα и R∂:
Корнями системы уравнений являются следующие значения номиналов компенсационных резисторов:
Rα=163,070 Ом;
R∂=501,037 ГОм.
Значение сопротивления резистора R∂ является довольно большим, его влияние на мультипликативную погрешность будет пренебрежимо малым. По этой причине можно произвести компенсацию мультипликативной температурной погрешности, включая только резистор Rα в выходную диагональ мостовой цепи датчика.
Путем частичного задействования термозависимого технологического резистора Rαm производят установку резистора Rα с вычисленным номиналом. Датчик оставляют подключенным к низкоомной нагрузке Rн=2·Rвых=2000 Ом.
Девятый этап. Производят оценку мультипликативной температурной погрешности после компенсации мультипликативной температурной погрешности. Для этого измеряют девиации выходного сигнала датчика при температурах t0, t+, t-.
В соответствии с [2] при температуре t0 будет измерена девиация выходного сигнала датчика:
При температурах t+, t- будут измерены девиации выходного сигнала датчика:
В соответствии с [2] вычисленные значения ТКЧ датчика после компенсации мультипликативной температурной погрешности составят:


Таким образом, описанный способ позволяет скомпенсировать как мультипликативную температурную погрешность, так и нелинейность температурной характеристики выходного сигнала датчика. При этом мультипликативная чувствительность к температуре в рассмотренном примере много меньше предельно допустимого значения температурной чувствительности (Skt∂on=10-4 1/°С).
Точность компенсации рассмотренным способом зависит от точности измерения выходных сигналов мостовой цепи датчика и округления результатов в процессе расчета.
Список литературы
1. Патент 2507476 Российская Федерация, МПК G01L 9/04. Способ настройки тензорезисторных датчиков с мостовой измерительной цепью по мультипликативной температурной погрешности с учетом положительной нелинейности температурной характеристики выходного сигнала датчика / В.А. Тихоненков, Д.А. Солуянов; заявитель и патентообладатель Ульяновский государственный технический университет.- №2012128015/28; заявл. 03.07.2012; опубл. 20.02.2014, бюл. №5.
2. Тихоненков В.А. Теория, расчет и основы проектирования датчиков механических величин / В.А. Тихоненков, А.И. Тихонов. - Ульяновск: УлГТУ, 2000-452 с.
3. Патент 2443973 Российская Федерация, МПК G01L 9/04. Способ настройки тензорезисторных датчиков с мостовой измерительной цепью по мультипликативной температурной погрешности с учетом нелинейности температурной характеристики выходного сигнала датчика / В.А. Тихоненков, Л.Н. Винокуров; заявитель и патентообладатель Ульяновский государственный технический университет. №2010142328/28; заявл. 15.10.2010; опубл. 27.02.2012, бюл. №6.
Изобретение относится к измерительной технике. Датчик подключают к нагрузке Rн>500 кОм, измеряют начальный разбаланс и выходной сигнал при нормальной температуре t0, а также температурах t+ и t-, соответствующих верхнему и нижнему пределу рабочего диапазона температур. Вычисляют ТКЧ мостовой цепи 







1. Косвенный способ настройки тензорезисторных датчиков с мостовой измерительной цепью по мультипликативной температурной погрешности с учетом нелинейности температурной характеристики выходного сигнала датчика, заключающийся в том, что вычисляют нелинейность ТКЧ мостовой цепи 

















где Δt+=t+-t0 - положительный диапазон температур; Δt-=t--t0 - отрицательный диапазон температур;
перед проверкой принадлежности 








где 

после вычисления 


после включения резистора Ri и до вычисления 




















и
где 


 - ТКС резистора Rαm, зашунтированного резистором Rш1, при температурах t+ и t- соответственно:
- ТКС резистора Rαm, зашунтированного резистором Rш1, при температурах t+ и t- соответственно:
 - сопротивление резистора Rαm, зашунтированного резистором Rш2;
- сопротивление резистора Rαm, зашунтированного резистором Rш2;
 - ТКС резистора Rαm, зашунтированного резистором Rш2,
- ТКС резистора Rαm, зашунтированного резистором Rш2,
при температурах t+ и t- соответственно;


2. Способ по п. 1, отличающийся тем, что после вычисления номиналов компенсационных резисторов Rα и R∂ включают термозависимый резистор Rα с вычисленным номиналом путем частичного задействования технологического резистора Rαm.
| СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО МУЛЬТИПЛИКАТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ С УЧЕТОМ НЕЛИНЕЙНОСТИ ТЕМПЕРАТУРНОЙ ХАРАКТЕРИСТИКИ ВЫХОДНОГО СИГНАЛА ДАТЧИКА | 2010 |
|
RU2443973C1 |
| СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО МУЛЬТИПЛИКАТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ С УЧЕТОМ ПОЛОЖИТЕЛЬНОЙ НЕЛИНЕЙНОСТИ ТЕМПЕРАТУРНОЙ ХАРАКТЕРИСТИКИ ВЫХОДНОГО СИГНАЛА ДАТЧИКА | 2012 |
|
RU2507476C1 |
| СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО МУЛЬТИПЛИКАТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ С УЧЕТОМ НЕЛИНЕЙНОСТИ ТЕМПЕРАТУРНОЙ ХАРАКТЕРИСТИКИ ВЫХОДНОГО СИГНАЛА ДАТЧИКА | 2010 |
|
RU2450244C1 |
| Способ настройки тензометрических мостов | 1990 |
|
SU1758563A1 |
| US 4172389 A1, 30.10.1979. | |||

