Изобретение относится к области формирования изображения. В частности, оно находит применение при формировании нуклеарных медицинских изображений и относится к устройствам для его выполнения. Однако описанное ниже находит более широкое применение в способах и устройствах формирования томографических изображений, в общем.
В однофотонной эмиссионной компьютерной томографии (SPECT, ОФЭКТ) используются один или больше детекторов излучения, расположенных вокруг субъекта. Радиоактивный индикатор, заранее поданный в субъект (например, радиофармацевтическое средство, заранее поданное человеку - медицинскому пациенту), генерирует радиоактивное излучение, которое детектируют с помощью детекторов излучения как события излучения или подсчеты. Детектируемые события излучения определяют данные формирования изображения, которые реконструируют для генерирования изображения, в общем обозначающего распределение радиофармацевтического средства в субъекте. При некоторых подходах радиофармацевтическое средство выбирают так, чтобы оно предпочтительно накапливалось в органе или в другой области, представляющей интерес, такой как сердечная мышца, с целью формирования изображения сердца. В качестве детекторов излучения обычно устанавливают гамма-камеры с одной или больше головками детектора излучения, расположенными на раме, которая обеспечивает возможность томографического движения головок вокруг субъекта для получения видов при угловом охвате обычно приблизительно от 180° до 360°, что облегчает реконструирование трехмерного изображения.
В обычной кардиометрической камере SPECT две головки детектора расположены с фиксированным смещением 90° друг от друга на круглой или полукруглой раме и поворачиваются вокруг пациента одновременно, по меньшей мере, приблизительно на 90°, что обеспечивает, по меньшей мере, угловой охват 180° данных формирования изображения. Торс пациента обычно центрирован в изоцентре вращения головок детектора. Такая компоновка является удобной для установки сканирования, но при ее положении сердечная мышца находится в смещенном положении относительно изоцентра.
Реконструкция данных формирования изображения SPECT для получения трехмерного изображения представляет собой сложный вычислительный процесс. В некоторых подходах используют однопроходную фильтрованную реконструкцию по задней проекции. Такой подход является относительно быстрым и детерминистическим по сути. Однако однопроходная фильтрованная задняя проекция подвержена генерированию дефектов изображения, связанных с шумами в данных изображения. Также были разработаны итеративные статистические способы, такие как максимизация максимального правдоподобия - ожидания (ML-EM, ММП-О). Эти технологии являются недетерминистическими, то есть статистическими по своей сути, и они значительно более медленные и более интенсивные по расчетам, чем фильтрованная задняя проекция. Однако статистические технологии, такие как ML-EM имеют повышенную устойчивость к шумам по сравнению с фильтрованной задней проекцией.
Для нахождения медленного схождения ML-EM была разработана ускоренная деривативная технология, известная как максимизации ожидания упорядоченного подмножества (OS-EM, МУ-ОП). OS-EM также представляет собой итеративный процесс, но она работает путем обработки выбранных подмножеств из наборов данных формирования изображения. Вместо расчета обновления оценки, после оценки всех проекций (как в подходе ML-EM), в подходе OS-EM проекции группируют в соответствующие подмножества, и обновления оценки рассчитывают после оценки каждого из подмножеств.
Подмножества обработки данных значительно улучшают скорость схождения, но приводят к определенным недостаткам. Например, скорость схождения и точность OS-EM зависят от детальной компоновки подмножества или выбора проекций и от общей информации об объекте, содержащейся в каждом подмножестве данных проекций. В то время как ML-EM, в общем, обеспечивает гарантированное схождение после достаточного количества итераций, OS-EM и схожие технологии, которые обрабатывают подмножества данных, гарантированно сходятся, только если будет выполнен критерий, известный как критерий баланса подмножества. Выраженный в упрощенной форме критерий баланса подмножества состоит в том, что каждое подмножество проекции должно содержать одинаковое количество информации о наблюдаемом распределении индикатора. Если критерий баланса подмножества не удовлетворяется, что является типичным при клинических применениях, тогда, как известно, реконструкция OS-EM сходится в так называемый ограниченный цикл, заданный конечным количеством отдельных положений в пространстве решения. Следствие этого состоит в том, что решение, в соответствии с которым выполнили последнюю оценку подмножества, оказывает влияние на конечный результат реконструкции. На практике, итеративные алгоритмы реконструкции SPECT обычно останавливают перед тем, как возникнут циклы ограничения, поскольку, пока не будет достигнут цикл ограничения, итерация проявляет тенденцию формирования нефизических шумовых результатов. Однако, даже при раннем прекращении, качество реконструированного изображения зависит от выбора подмножеств проекции и их порядка обработки, когда критерий баланса подмножества не удовлетворяется или четко аппроксимирован.
В соответствии с одним аспектом раскрыт способ формирования изображения. Мгновенную скорость или время выдержки получения данных головки детектора оптимизируют как функцию положения вдоль пути головки детектора вокруг субъекта. Оптимизацию выполняют в отношении ожидаемого профиля радиоактивного излучения области, представляющей интерес, которая меньше, чем весь субъект. Головку детектора перемещают вдоль пути, используя оптимизированную мгновенную скорость или значения времени выдержки получения данных. Во время перемещения получают данные формирования изображения, используя головку детектора. Полученные данные формирования изображения реконструируют для генерирования реконструированного изображения, по меньшей мере, области, представляющей интерес.
В соответствии с другим аспектом раскрыта гамма-камера, выполненная с возможностью осуществления способа в соответствии с предыдущим параграфом.
В соответствии с другим аспектом раскрыта гамма-камера, включающая в себя одну или больше головок детектора и раму, выполненную с возможностью передвижения одной или больше головок детектора вдоль пути головки детектора с управляемой переменной скоростью или управляемыми значениями времени выдержки получения данных.
В соответствии с другим аспектом, раскрыт способ формирования изображения. Множество головок детектора одновременно перемещают вокруг субъекта так, что они расположены на определенном расстоянии вдоль пути и передвигаются с разными мгновенными скоростями или с разными значениями времени выдержки получения данных. Во время перемещения получают данные формирования изображения, используя множество головок детектора. Полученные данные формирования изображения реконструируют для генерирования реконструированного изображения, по меньшей мере, области, представляющей интерес, субъекта.
В соответствии с другим аспектом раскрыта справочная таблица. Справочная таблица содержит оптимизированные данные траектории головки детектора, содержащие одну из оптимизированных скоростей головки детектора и оптимизированных значений времени выдержки получения данных для головки детектора излучения, перемещающейся вдоль выбранного пути и получающей данные формирования изображения из области, представляющей интерес, субъекта.
В соответствии с другим аспектом раскрыта гамма-камера, содержащая, по меньшей мере, одну головку детектора, расположенную на раме, и пассивные ограничители, которые ограничивают, по меньшей мере, одну головку детектора, для движения вдоль пути в или на раме так, что чувствительная к излучению сторона, по меньшей мере, одной головки детектора обращена в направлении области, представляющей интерес.
Одно преимущество состоит в более быстрой итеративной реконструкции изображения.
Другое преимущество состоит в более точной итеративной реконструкции изображения.
Еще одно преимущество состоит в обеспечении кардиометрической камеры SPECT, которая более удобна для пациентов.
Дополнительное преимущество состоит в обеспечении улучшенной кардиометрической камеры SPECT.
Дополнительные преимущества настоящего изобретения будут понятны для специалистов данной области техники после чтения и понимания следующего подробного описания.
Изобретение может быть выполнено в форме различных компонентов и компоновок компонентов, и с использованием различных этапов и компоновок этапов. Чертежи представлены только с целью иллюстрации предпочтительных вариантов воплощения, и их не следует рассматривать как ограничение изобретения.
На Фиг.1 показан вид в перспективе кардиометрической камеры SPECT, установленной для формирования изображения сердца человеческого субъекта. На Фиг.1 неподвижная рама камеры SPECT показана в прозрачном виде для того, чтобы открыть внутренние компоненты, включающие в себя две головки детектора излучения.
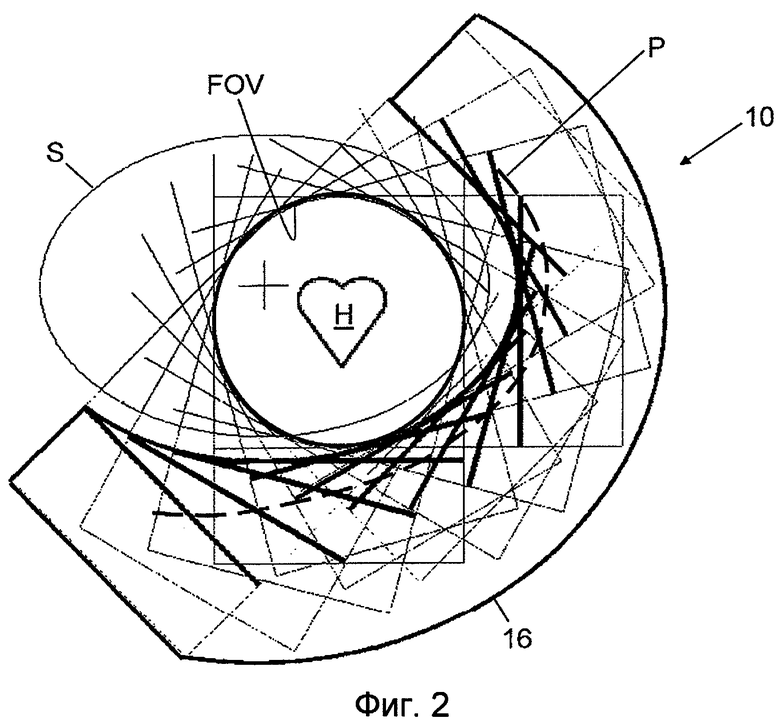
На Фиг.2 схематично показан осевой разрез, проходящий через камеру SPECT и торс субъекта, представленного на Фиг.1.
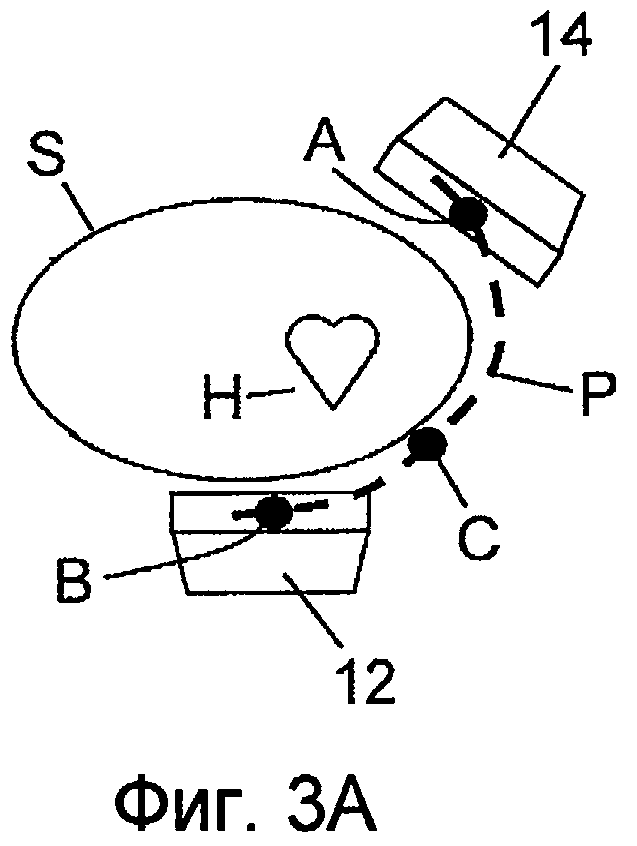
На Фиг.3A схематично идентифицированы примерные положения "A", "B" и "C" головок детектора вдоль пути перемещения.
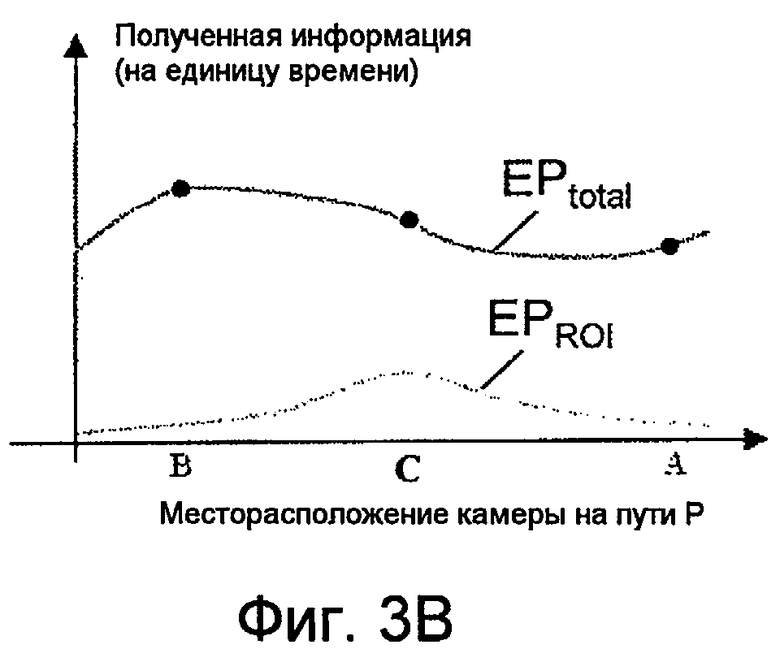
На Фиг.3B показаны планы радиоактивного излучения для субъекта и для области сердца, представляющей интерес.
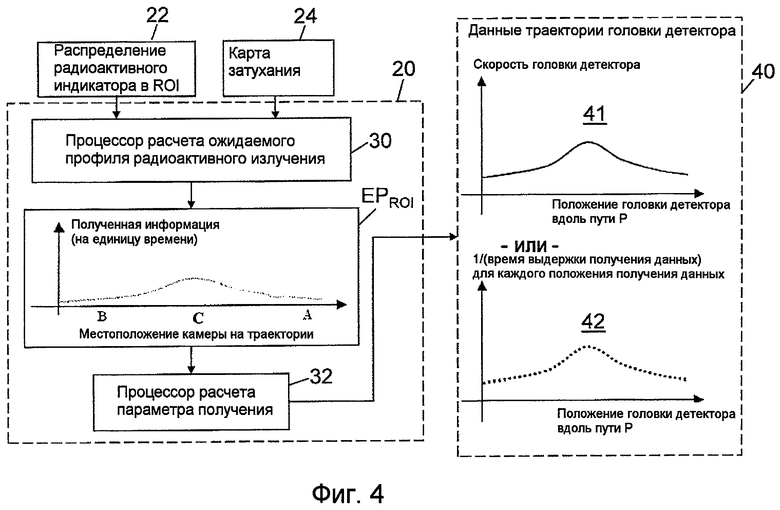
На Фиг.4 схематично представлена система оптимизации траектории головок детектора излучения.
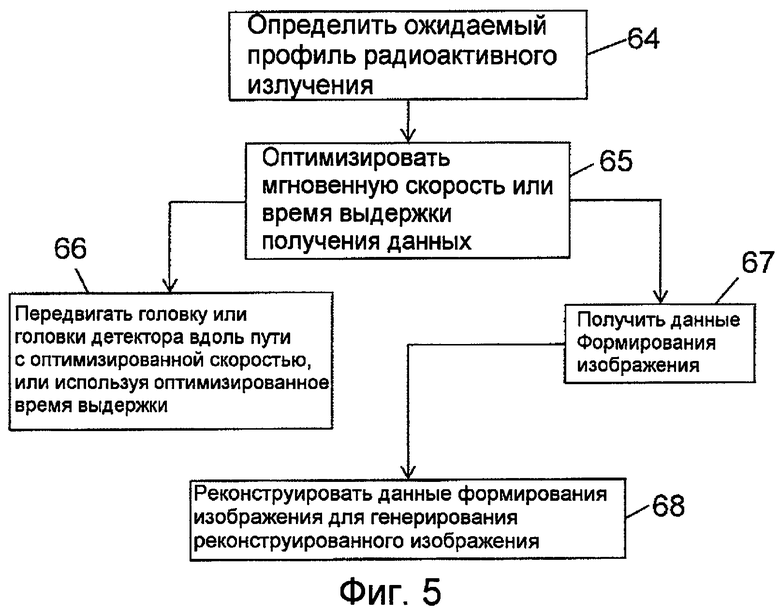
На Фиг.5 схематично показан способ формирования изображения, выполняемый, соответствующим образом, с использованием камеры по Фиг.1 и 2.
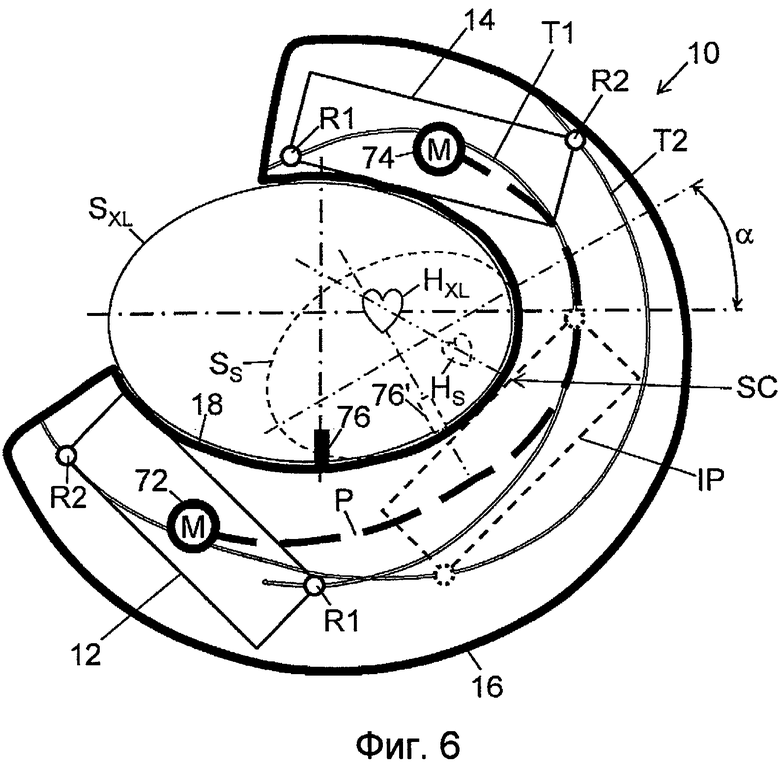
На Фиг.6 схематично показано, как камера SPECT по Фиг.1 и 2 может быть приспособлена для субъектов с различными размерами, используя фиксированный путь для головок детектора излучения.
Как показано на Фиг.1 гамма-камера, такая как представленная кардиометрическая камера 10 SPECT, включает в себя одну или больше головок детектора, таких как представленные две головки 12, 14 детектора, расположенные на или в раме 16. В каждой головке 12, 14 детектора используется соответствующая матрица детектора излучения, такая как, например, матрица трубки фотоумножителя, матрица диодных детекторов, матрица детекторов на кристаллах NaI и т.д. Соответствующая коллимация предусмотрена для определения данных проекции, например, с использованием сотовидного коллиматора поглощения излучения, расположенного перед матрицей детекторов. Представленная рама 16 включает в себя внешнюю эллиптическую стенку 18, по существу, соответствующую эллиптическому пути P (обозначен пунктирной линией на Фиг.1) головок 12, 14 детектора, а также, по существу, соответствующую торсу человеческого субъекта S. В более общем случае путь P представляет собой известный путь, который в иллюстрируемом варианте воплощения является эллиптическим так, что он, по существу, соответствует форме торса. Для других субъектов или участков субъекта может быть предпочтительным неэллиптический путь. Например, если область, представляющая интерес, представляет собой простату, тогда может быть предпочтительным неэллиптический путь, близкий к паху. Кроме того, предусматривается возможность регулирования пути P для пациентов с разными размерами, например, путем добавления или удаления увеличивающих соединителей. Для двух вставляемых, в случае необходимости увеличивающих соединителей, например, существуют четыре выбираемых пути P, соответствующих случаям использования без вставленных увеличивающих соединителей, обоим вставленным увеличивающим соединителям, и два дополнительных пути, выбираемых при вставке выбранного одного из двух увеличивающих соединителей.
В ходе формирования изображения одна или больше головок 12, 14 детектора движутся вдоль пути P и получают данные формирования изображения. В некоторых вариантах воплощения головки детектора движутся непрерывно во время получения данных. В некоторых вариантах воплощения головки детектора движутся в конфигурации "пошаговой съемки", в которой головка движется в положение получения, получает данные и затем движется к следующему положению получения данных, и т.д., получая данные изображения только, когда головка неподвижна в положении получения. В некоторых вариантах воплощения головки 12, 14 детектора могут двигаться относительно быстро и проходят путь P несколько раз вперед и назад во время получения данных формирования изображения. Типично, непрерывный режим получения данных является предпочтительным, когда головки качаются вперед и назад для получения данных. Следует понимать, что траектория головки может представлять собой либо непрерывную траекторию, на которой определена мгновенная скорость в каждой точке вдоль пути P, и может представлять собой траекторию типа "пошаговой съемки", на которой определено время нахождения головки детектора в каждом положении получения данных. Кроме того, следует понимать, что траектория может быть либо траекторией одного прохода, по которой головка детектора движется за один проход вдоль части или вдоль всего пути P, или может быть траекторией перемещения назад и вперед, на которой головка детектора движется назад и вперед за два или больше прохода вдоль части или всего пути P. Также предусматривается возможность траектории в виде многопроходной траектории, на которой головка детектора возвращается обратно в ту же исходную точку вдоль пути P при каждом проходе, в результате чего головка детектора движется вдоль одного и того же направления во время получения данных при множестве проходов.
Рама 16 выполнена с возможностью обеспечения позиционирования головок 12, 14 детектора, близко к торсу человеческого субъекта S, и обеспечивается определенная статичность рамы, наблюдаемая субъектом S. Движение головок 12, 14 детектора внутри рамы 16 не видимо для субъекта S, за исключением возможного случая опосредованного ощущения из-за вибрации или шума. Стационарная рама 16, в случае необходимости, служит упором для рук или столом для субъекта S. В некоторых вариантах воплощения комформная внешняя стенка 18 выполнена относительно тонкой и находится в непосредственном контакте с субъектом S, и головки детектора находятся в контакте или на некотором расстоянии, с определенном малым зазором от внутренней стороны стенки 18, что позволяет устанавливать головки 12, 14 детектора ближе к субъекту S во время их движения вдоль пути P. При такой компоновке с непосредственным контактом достигается приблизительно на 30% большая эффективность, по сравнению с головками детектора, расположенными на расстоянии два сантиметра от субъекта S.
На Фиг.2 схематично показан осевой разрез, проходящий через камеру 10 SPECT и торс субъекта S. Положение сердечной мышцы H в субъекте S схематично обозначено на Фиг.2 с использованием символа "сердца". При формировании изображения сердца область, представляющая интерес, представляет сбой сердечную мышцу H. В других клинических или диагностических вариантах применения другой орган или ткань, такой как простата, могут представлять собой область, представляющую интерес. Радиофармацевтическое средство обычно выбирают так, чтобы оно, предпочтительно, накапливалось в органе или в ткани, представляющей интерес. Путь P, по которому следуют головки 12, 14 детектора, обычно центрирован на сердце H, хотя предусматривается возможность некоторого отклонения от центрального позиционирования сердца. Местоположения линий кромки поля зрения для различных положений получения данных головок 12, 14 детектора вдоль пути P обозначены на Фиг.2. Линии кромки поля зрения для каждого положения, по существу, перпендикулярны стороне головки детектора, благодаря типичному использованию линейных или конических с малым углом коллиматоров головок 12, 14 детектора. Как показано на Фиг.2, местоположения линий кромки поля зрения совместно образуют, в общем, круглую или эллиптическую границу поля зрения FOV (ПЗ), центрированную на сердце H, расположенном, приблизительно, в изоцентре пути P и расположенном асимметрично относительно торса субъекта S.
На Фиг.3A и 3B представлены характеристики радиоактивного излучения, наблюдаемые головками 12, 14 детектора вдоль пути P. На Фиг.3A схематично показан осевой разрез, проходящий через головки 12, 14 детектора и тело субъекта S, включающее в себя сердце H. На Фиг.3A рама 16 пропущена для ясности представления. В момент времени, иллюстрируемый на Фиг.3A, головка 14 детектора находится в положении, обозначенном "A", в то время как головка 12 детектора находится в положении, обозначенном "B". Также обозначено дополнительное положение "C", промежуточное между положениями "A" и "B". На Фиг.3B представлен план ожидаемой общей информации, полученной из всего тела субъекта S за отрезок времени, вдоль пути P, то есть профиль радиоактивного излучения EPtotal, и также представлены планы полученной информации из области H, представляющей интерес, за отрезок времени вдоль пути P (то есть профиль EPROI радиоактивного излучения). Профиль EPtotal общего излучения и профиль EPROI излучения от сердца H отличаются по величине и очертанию или форме. Например, в положении "B" профиль EPtotal общего излучения имеет высокое значение, относительно других положений вдоль пути P, в то время как профиль EPROI радиоактивного излучения от сердца H относительно низкий в положении "B". В отличие от этого, в положении "C" профиль EPtotal общего излучения относительно низкий, в то время как профиль излучения EPROI области, представляющей интерес, имеет пик в положении "C". Разные очертания профиля EPtotal общего радиоактивного излучения и профиля излучения EPROI, области, представляющей интерес, отражают различные факторы, такие как расстояние от детектора до торса, в отличие от расстояния от детектора до сердца, распределение промежуточных поглощающих излучение тканей, таких как костная ткань, угол линии визирования головки детектора относительно торса или сердца и т.д.
Для получения непостоянного профиля радиоактивного излучения EPROI области, представляющей интерес (то есть сердца H, в примерном случае формирования изображения сердца), траекторию каждой камеры 10 SPECT независимо конфигурируют таким образом, что каждая головка 12, 14 детектора движется независимо вдоль пути P для оптимизации получения данных, в зависимости от профиля излучения EPROI области, представляющей интерес, таким образом, чтобы способствовать удовлетворению или существенному удовлетворению критерию баланса подмножества. В результате оптимизации или балансировки распределения информации в полученных данных формирования изображения лучше удовлетворяется критерий баланса подмножества, или он может быть аппроксимирован во время итеративной реконструкции, что в свою очередь приводит к более быстрой и более точной итеративной реконструкции.
Траектории оптимизируют путем оптимизации мгновенной скорости или времени выдержки получения данных для каждой головки детектора как функцию положения вдоль пути P с учетом профиля EPROI радиоактивного излучения области H, представляющей интерес, которая меньше, чем все весь субъект S. Мгновенная скорость или время выдержки получения данных каждой головки детектора оптимизируют в соответствии с областью, представляющей интерес, профиля радиоактивного излучения EPROI, вместо профиля общего излучения EPtotal, поскольку желательно оптимизировать реконструированное изображение в области, представляющей интерес. На каждой оптимизированной траектории головка детектора движется относительно более медленно (в случае непрерывного получения данных) или имеет более длительное время выдержки получения данных (в случае дискретного формирования изображения типа "пошаговой съемки") на этих участках пути P, для которых профиль радиоактивного излучения EPROI области H, представляющей интерес, является низким. В отличие от этого, головка детектора движется относительно быстрее и имеет относительно более короткое время выдержки получения данных на тех участках пути P, на которых профиль радиоактивного излучения EPROI области H, представляющей интерес, высокий. Цель оптимизации траектории состоит в том, чтобы обеспечить, по существу, одинаковый ожидаемый подсчет радиоактивных событий области H, представляющей интерес, для каждого углового интервала или времени выдержки получения данных вдоль пути P. Следует понимать, что термины "оптимизация" и "оптимизировать", используемые здесь, следует рассматривать в широком смысле, как охватывающие не глобальную или приблизительную оптимизацию траекторий, относительно профиля EPROI радиоактивного излучения области H, представляющей интерес. Например, может применяться итеративная оптимизация, которая заканчивается, когда ожидаемый подсчет радиоактивных событий для каждого углового интервала или времени выдержки получения данных становится однородным в пределах определенного измерения.
Со ссылкой на Фиг.4 описана соответствующая система 20 для оптимизации траекторий головок 12, 14 детектора. Система 20 принимает входные данные распределения 22 радиоактивного индикатора в области H, представляющей интерес, субъекта S. В случае необходимости, система 20 дополнительно принимает входную дополнительную информацию, такую как карта 24 затухания, извлеченная из данных формирования изображения трансмиссионной компьютерной томографии (CT, КТ) или другого источника. На основе таких источников информации процессор 30 расчета ожидаемого профиля радиоактивного излучения выполняет оценку или рассчитывает ожидаемый профиль радиоактивного излучения EPROI области H, представляющей интерес, субъекта S. Процессор 32 расчета параметра получения рассчитывает соответствующие данные 40 траектории головки детектора, для каждой головки 12, 14 детектора на основании ожидаемого профиля EPROI радиоактивного излучения области, представляющей интерес. Например, процессор 32 расчета параметра получения рассчитывает траекторию 41 в форме скорости головки детектора как функцию положения вдоль пути P, в случае получения данных, или как время выдержки положения головки детектора в положении получения для формирования изображения типа "пошаговой съемки".
Распределение 22 радиоактивного индикатора может быть получено различным образом, например на основе аналогичных, проведенных ранее обследований или на основе теоретических расчетов. Карта 24 затухания или другая структурная информация может быть получена от формирования изображения CT, от сканирования линейного/точечного источника, совместно с ожидаемым или обычным распределением 22 радиоактивного индикатора, или т.д. Если информация 24 о поглощении недоступна, соответствующим образом выполняют оптимизацию траектории, используя контур объекта оценки, например, предполагая, что объект однородно заполнен водой или другим соответствующим материалом.
Для заданной головки детектора и для заданного положения получения вдоль пути P этой головки детектора выполняют оценку EPROI интенсивности радиоактивного излучения на основе распределения 22 радиоактивного индикатора и информации 24 о поглощении. Оптимизированную скорость 41 головки детектора или значение времени 42 выдержки получения данных выбирают таким образом, чтобы обеспечить большее время получения в тех местах траектории, где количество информации, получаемой за единицу времени, мало, и меньшее время в других местах. В примере камеры 10 SPECT, показанной на Фиг.1 и 2, имеется две головки 12, 14 детектора, выполненные с возможностью независимого сканирования. В таком случае, когда имеется множество головок детектора, которые могут быть независимо просканированы, систему 20 оптимизации траектории, соответствующим образом, независимо применяют к каждой головке детектора, за исключением предпочтений по ограничению оптимизаций для гарантии исключения столкновения головок детектора.
Как далее показано на Фиг.4 и также дополнительно со ссылкой на Фиг.1, в некоторых вариантах воплощения данные 40 траектории головки детектора рассчитывают с помощью системы 20 оптимизации траектории перед началом получения данных формирования изображения. Контроллер 50 использует заранее рассчитанные данные 40 траектории головки детектора для управления камерой 10 SPECT для выполнения получения данных за один проход, при котором головку или головки 12, 14 детектора перемещают вдоль пути P, используя рассчитанные траектории 40, и во время перемещения получают данные формирования изображения, используя головку или головки 12, 14 детектора. Полученные данные формирования изображения сохраняют в запоминающем устройстве 52 и реконструируют, используя процессор 54 итеративной реконструкции, выполняющий алгоритм итеративной реконструкции, с помощью которого обрабатывают подмножества данных, таких как алгоритм максимизации ожидания упорядоченного подмножества (OS-EM). Поскольку оптимизированные заранее вычисленные данные 40 траектории головки детектора используются во время получения данных формирования изображения, подмножества данных формирования изображения обычно удовлетворяют или, по существу, удовлетворяют критерию баланса подмножества таким образом, что улучшается скорость и точность итеративной реконструкции. Процессор 54 реконструкции генерирует реконструированное изображение, по меньшей мере, области, представляющей интерес, которое сохраняют в запоминающем устройстве 56 изображений. Реконструированное изображение можно отображать, обрабатывать, с ним можно манипулировать, его можно передавать через сеть больницы или через сеть Интернет или использовать по-другому.
Если используют множество головок 12, 14 детектора, тогда формируют общее множество данных, в котором комбинируют полученные данные формирования изображения от множества головок 12, 14 детектора. Общее подмножество данных реконструируют с помощью процессора 54 реконструкции, используя алгоритм итеративной реконструкции, такой как OS-EM, который итеративно обрабатывает выбранные подмножества из общего множества данных для генерирования реконструированного изображения.
В других вариантах воплощения используют получение данных за два прохода, при котором выполняют перемещение и получение данных, как интегрированный процесс. При первом проходе получения данных формирования изображения головка или головки 12, 14 детектора перемещаются вокруг субъекта S вдоль пути P, используя неоптимизированную (или частично оптимизированную) траекторию с неоптимизированной (или частично оптимизированной) мгновенной скоростью или временем выдержки получения данных, и первые данные формирования изображения получают во время первого перемещения, используя головку или головки 12, 14 детектора. В первой траектории может, например, использоваться неоптимизированная постоянная мгновенная скорость головки детектора или постоянное время нахождения при получении данных, или скорость или время выдержки, частично оптимизированные на основе предыдущего формирования изображения аналогичных пациентов. Полученные в результате первые данные формирования изображения используют для определения ожидаемого профиля EPROI радиоактивного излучения области H, представляющей интерес, например, выполняя приблизительную реконструкцию первых данных формирования изображения, используя быстрый приблизительный алгоритм реконструкции, такой как фильтрованная задняя проекция. На основе ожидаемого профиля EPROI излучения процессор 32 расчета параметра получения данных определяет один или больше угловых интервалов, в которых недостаточно первых данных формирования изображения. В ходе второго прохода при получении данных формирования изображения головка или головки 12, 14 детектора перемещаются вдоль, по меньшей мере, участка пути P, включающего в себя один или больше угловых интервалов, в которых недостаточно первых данных формирования изображения, используя оптимизированную мгновенную скорость или время 40 выдержки получения данных, рассчитанные процессором 32 расчета параметра получения данных, используя ожидаемый профиль EPROI излучения, извлеченный из первых данных формирования изображения, как входных данных. Во время второго перемещения получают дополняющие данные формирования изображения, по меньшей мере, в одном или больше угловых интервалах, в которых недоставало первых данных формирования изображения. Это формирует соответствующий общий набор данных формирования изображения, который удовлетворяет или, по существу, удовлетворяет критерию баланса подмножества, в соответствии с областью H, представляющей интерес, которая пригодна для реконструкции с помощью алгоритма реконструкции OS-EM или другого итеративного алгоритма реконструкции, который обрабатывает подмножества данных формирования изображения.
В другом подходе, во время первого прохода получают предварительные данные формирования изображения, которые не используются при реконструкции изображения, но которые приблизительно реконструируют фильтрованной задней проекцией или тому подобным для генерирования ожидаемого профиля EPROI радиоактивного излучения в области H, представляющей интерес. Ожидаемый профиль EPROI радиоактивного излучения, сгенерированный по предварительным данным, вводят в процессор 32 расчета параметра получения данных для генерирования оптимизированной мгновенной скорости или времени 40 выдержки получения данных. Затем выполняют второй проход, используя оптимизированную мгновенную скорость или время 40 выдержки получения данных для получения данных формирования изображения, которые используются для клинической или диагностической реконструкции изображения, в то время как предварительные данные отбрасывают.
В некоторых вариантах воплощения предусматривается возможность регулировать мгновенную скорость или время выдержки получения данных во время перемещения и получения данных для формирования изображения на основе разностей между полученными данными для формирования изображения и ожидаемыми данными формирования изображения, оцененными по ожидаемому профилю EPROI радиоактивного излучения области H, представляющей интерес, субъекта S.
В некоторых вариантах воплощения данные 40 траектории, например оптимизированную мгновенную скорость 41 или значения 42 времени выдержки получения данных, получают из устройства 60 хранения данных. Оптимизированная мгновенная скорость 41 или значения 42 времени выдержки получения данных могут быть, например, сохранены в устройстве 60 хранения данных в виде справочной таблицы. В таких вариантах воплощения найденные данные 40 оптимизированной траектории заранее определены как оптимизированные в отношении ожидаемого профиля EPROI радиоактивного излучения области H, представляющей интерес. В некоторых таких вариантах воплощения оптимизация включает в себя определение размера области, представляющей интерес, и выбор оптимизированной мгновенной скорости или значения времени выдержки получения данных для поиска на основе определенного размера. Например, траектории, соответствующие различным ожидаемым профилям радиоактивного излучения для различных размеров сердца, могут быть сохранены в устройстве 60 хранения траекторий. Габариты, вес или другой размер сердца пациента, изображение которого предполагается сформировать, затем оценивают по габаритам, весу и другой характеристике пациента и находят соответствующие траектории. Сохраненную информацию траекторий в таких вариантах воплощения можно хранить локально, или она может быть передана из региональной или национальной базы данных, доступ к которой осуществляют через Интернет или другую цифровую сеть. Вместо сохранения оптимизированной мгновенной скорости или времени выдержки, в некоторых вариантах воплощения сохраняют ожидаемый профиль EPROI радиоактивного излучения области, представляющей интерес, и вводят его в процессор 20 оптимизации траекторий перед формированием изображения для генерирования траектории.
В представленной на чертеже камере 10 SPECT обе головки 12 14 детектора следуют по одному и тому же пути P, хотя каждая головка детектора может перемещаться по разному участку пути P во время формирования изображения. В других вариантах воплощения предусматриваются головки детектора, которые перемещаются по разным путям во время формирования изображения. Хотя представлены две головки 12, 14 детектора, в других вариантах воплощения могут быть включены одна, три или больше головок детектора.
Со ссылкой на Фиг.5 ниже будет описана блок-схема, соответствующая последовательности формирования изображения. Ожидаемый профиль EPROI радиоактивного излучения области, представляющей интерес, определяют в ходе операции 64. Это может быть выполнено различными способами. Например, в некоторых вариантах воплощения такой профиль определяют для субъекта, изображение которого формируют, используя предварительное сканирование. В других вариантах воплощения такой профиль находят в справочной таблице или в другом устройстве 60 хранения данных, например, находя стандартный профиль для размера субъекта, который ближе всего подходит к размеру субъекта, изображение которого формируют. На основе ожидаемого профиля EPROI радиоактивного излучения во время операции 65 определяют мгновенную скорость или время выдержки получения данных для перемещения одной или больше головок 12, 14 детектора вдоль пути P. В некоторых вариантах воплощения операции 64, 65 могут быть скомбинированы таким образом, что определяют стандартные траектории вдоль пути P на основе ожидаемого профиля EPROI радиоактивного излучения и сохраняют в устройстве 60 хранения. Головку или головки 12, 14 детектора передвигают вдоль пути P с определенной оптимизированной скоростью или скоростями или используя оптимизированное время выдержки, во время операции 66. Одновременно с передвижением головка или головки 12, 14 детектора принимают данные формирования изображения при одновременном выполнении операции 67. Полученные данные формирования изображения реконструируют с получением реконструированного изображения, по меньшей мере, области, представляющей интерес, во время операции 68.
На Фиг.1 и 2 показана камера 10 SPECT, формирующая изображение субъекта S, торс которого достаточно большой, так что он, по существу, заполняет область обследования рамы и соответствует по форме большей части конформной внешней стенке 18. На практике, субъекты поступают с разнообразными различными размерами, от худых людей малого роста до крупных и тучных людей.
На Фиг.6 показано, что камера 10 может иметь диапазон различных размеров субъекта, используя один путь P для головок 12, 14 детектора излучения. На Фиг.6 головка 12 детектора излучения показана в ее крайнем положении по часовой стрелке, в то время как головка 14 детектора излучения показана в ее крайнем положении против часовой стрелки. Для иллюстрации пунктирными линиями также показано промежуточное положение TP головки детектора, которое может быть занято любой из головок 12, 14 детектора излучения, в зависимости от времени и траектории. В конфигурации, показанной на Фиг.6, рама 16 и, в частности, конформная внешняя стенка 18, обращенная к области проверки, имеют такие габариты и форму, чтобы в них можно было разместить субъекта SXL с очень большими размерами. Для такого субъекта головки детектора излучения движутся в полном диапазоне вдоль пути P во время формирования изображения для получения данных формирования изображения в достаточно большом угловом диапазоне для формирования изображения субъекта SXL очень большого размера.
С другой стороны, малый субъект SS не заполняет область обследования камеры 10. Вместо этого, малый субъект SS размещают, насколько это возможно, близко, например, в контакте с центральным участком конформной внешней стенки 18 камеры 10, как показано на Фиг.6. Поворот торса малого субъекта SS на угол α, по сравнению с большим субъектом SXL, позволяет обеспечить контакт большего участка малого субъекта SS или расположить его в непосредственной близости к конформной внешней стенке 18. Точное значение угла α зависит от габарита и формы торса субъекта. Устанавливая малый субъект SS, насколько это возможно, близко к конформной внешней стенке 18 рамы 16, обеспечивается установка головок 12, 14 детектора близко к малому субъекту SS, что обеспечивает возможность значительной оптимизации качества изображения SPECT.
Кроме того, размещение малого субъекта SS близко к центральному участку конформной внешней стенки 18 в пределах углового поворота обеспечивает то, что центр области, представляющей интерес, малого субъекта SS (такого как представленное на иллюстрации сердце HS малого субъекта SS) и центр области, представляющей интерес, очень большого субъекта SXL (такого как представленное на иллюстрации сердце HXL, очень большого субъекта SXL) будут иметь одинаковые центры SC сканирования вдоль пути P. Как можно видеть на Фиг.6, центры HS, HXL обеих областей, представляющих интерес, приблизительно центрированы в области обследования рамы 16 и ближе всего находятся к конформной внешней стенке 18 вокруг одного и того же центра SC сканирования.
Путь P оптимизирован для формирования изображения области, представляющей интерес, имеющей центр HXL. Путь P не является оптимальным для формирования изображения области, представляющей интерес, имеющей центр HS, но его компенсируют путем установки центра HS ближе к детекторам 12, 14 излучения. Головки 12, 14 детектора движутся вдоль одного и того же пути P во время формирования изображения малого субъекта SS, так же как они движутся во время формирования изображения очень большого субъекта SXL. Однако головки 12, 14 детектора, в случае необходимости, движутся в меньшем диапазоне вдоль пути P во время формирования изображения малого субъекта SS, по сравнению с формированием изображения очень большого субъекта SXL. Малый угловой диапазон установлен с центром, приблизительно в центре SC сканирования. В более общем случае, угловой диапазон соответствующим образом адаптирован для субъектов разного размера, при этом угловой диапазон для каждого размера установлен с центром около одного и того же центра SC сканирования. В других вариантах воплощения, диапазон 180° или больший диапазон охватывается независимо от габарита пациента.
Некоторые типичные размеры торса очень большого субъекта SXL, могут представлять собой, например, 46 см × 32 см, в то время как типичные размеры торса малого субъекта SS могут представлять собой, например, 30 см × 20 см. Эти данные представляют собой только примеры, и габарит и диапазон соотношений габаритов должны соответствовать диапазону типичного охвата населения, представляющего интерес.
В одной соответствующей механической конструкции центры двух головок 12, 14 детекторов движутся вдоль пути P во время формирования изображения в пределах углового диапазона (который обычно является разным для каждой из головок 12, 14 детектора), выбранного на основе габарита субъекта. Движение головок детектора ограниченно следованием по пути P с использованием первого пассивного ограничителя, определенного первой вытянутой криволинейной поверхностью, канавкой, или другой направляющей или дорожкой T1, которая направляет первый шариковый подшипник, кулачок, ролик или другое соединение R1 в пределах одного угла каждой из головок 12, 14 детектора, и второго пассивного ограничителя, определенного второй вытянутой криволинейной поверхностью, канавкой или другой направляющей, или дорожкой T2, которая направляет второй шариковый подшипник, кулачок, ролик или другое соединение R2 в пределах противоположного угла каждой головки 14 детектора. Кривизну ограничителей дорожек T1 и T2 выбирают так, чтобы они удерживали центры детекторов 12, 14 излучения вдоль пути P, и чувствительные к излучению стороны головок 12, 14 детектора, обращенными к положению центра наибольшей области, представляющей интерес (то есть обращенными к центру HXL очень большого субъекта SXL). Для малого субъекта SS направление сторон чувствительных к излучению головок 12, 14 детектора будет несколько отклоняться от сердца Hs из-за смещения положения сердца Hs относительно сердца Hxl. Однако, это компенсируется близким положением стороны детектора к сердцу Hs. Однако, отклонение увеличивается при удалении углового положения от центра SC сканирования, и, таким образом, если используют меньший угловой диапазон для формирования изображения малого субъекта SS, дополнительно уменьшается влияние отклонения направления. В качестве альтернативы, диапазон 180° или больший диапазон может быть охвачен независимо от габарита тела пациента.
Ограничители R1, R2, T1, T2 могут быть выполнены в разных механических формах. Например, криволинейные поверхности или дорожки T1, T2 могут представлять собой обработанные на станке изогнутые дорожки канавки, поверхности или тому подобное в раме 16, изготовленной путем литья, фрезерования, шлифования или другого процесса или с использованием существующего профилированного материала, который перерабатывают для получения соответствующих форм, определяющих путь. В некоторых вариантах воплощения внутренняя стенка рамы 16, соответствующая конформной внешней стенке 18, служит криволинейной поверхностью или дорожкой, которая ограничивает движение головок 12, 14 детектора.
Благодаря использованию пассивных ограничителей R1, R2, T1, T2, в которых движение каждой головки 12, 14 детектора пассивно ограничено (в отличие от определенного использования рабочего органа привода, роботизированных рук или тому подобное), достаточно использовать один соответствующий двигатель 72, 74 на головку 12, 14 детектора для независимого приведения в движение двух головок 12, 14 детектора вдоль пути P так, чтобы чувствительные к излучению стороны постоянно обозревали центр наибольшей принятой области HXL, представляющей интерес. Для механической точности предпочтительно иметь головки 12, 14 детектора, двигающиеся только в одном направлении (по часовой стрелке или против часовой стрелки каждая) вдоль пути P во время получения изображения. Однако, также предусматривается возможность двунаправленного движения, то есть назад и вперед. Благодаря тому, что обеспечивается отдельный двигатель 72, 74 привода для каждой из головок 12, 14 детектора, обе головки 12, 14 можно передвигать независимо вдоль одного и того же пути P. Положения головок 12, 14 детектора, движущихся вдоль пути P, может быть определено с помощью датчиков, установленных вдоль дорожек T1 и T2, которые детектируют прохождение мимо соединений R1 и R2, или с помощью датчика движения, встроенного в приводящие в движение двигатели 72, 74, или тому подобное. Кроме того, хотя пассивные ограничители, такие как проиллюстрированные пассивные ограничители R1, R2, T1 и T2, имеют определенные преимущества, включающие в себя, по меньшей мере, те, которые были описаны здесь, также предусматривается возможность использования активных роботизированных головок детектора, рабочих органов привода, или тому подобного для обеспечения независимого движения одной, двух или больше головок детектора излучения, в случае необходимости, включающих в себя движение головок детектора в направлении к субъекту или от него.
Любой соответствующий подход можно использовать для определения углового диапазона сканирования изображения. В некоторых вариантах воплощения используется элемент для определения габарита субъекта. Например, элемент может быть мерной лентой (не показана), используемой для измерения размера талии субъекта перед тем, как субъект войдет в область обследования, и угловой диапазон можно выбрать из справочной таблицы или с помощью функции, относящейся к размеру талии, при изменении углового диапазона. В другом рассматриваемом варианте подхода элемент представляет собой ручку 76, установленную с возможностью скольжения в горизонтальном канале или прорези, сформированной в конформной внешней стенке 18. При этом субъект обеими руками удерживает ручку 76 для определения угловой ориентации α субъекта. Угловой диапазон затем определяют по угловой ориентации α. Например, показана ручка 76, при этом очень большой субъект SXL удерживает ее в центре впереди, в то время как представленная пунктиром ручка 76' представляет ситуацию, когда ручку держит малый субъект SS. Другие элементы можно использовать для определения габарита субъекта по измеренному параметру, например элемент может представлять собой шкалу веса, и габарит субъекта можно получать на основе измеренного веса субъекта. Если используют исходное предварительное сканирование для генерирования ожидаемого профиля EPROI радиоактивного излучения области H, представляющей интерес, для оптимизации получения данных формирования изображения, то исходное предварительное сканирование, в случае необходимости, также можно использовать для определения габарита пациента и идентификации габарита и положения сердца HS или сердца HXL.
Благодаря ограничению движения головок 12, 14 детектора пассивными ограничителями R1, R2, T1, T2 в комбинации с позиционированием субъекта, независимо от габарита, с установкой их как можно ближе к центру SC сканирования, можно обойтись без роботизированных рук, рабочих органов привода увеличивающих соединений или других механически сложных деталей для адаптации системы к разным габаритам пациента. Одного двигателя 72, 74 на головку 12, 14 детектора обычно достаточно для приведения в движение заданной головки детектора излучения вдоль ограниченного пути, хотя два или больше двигателя или движущих устройств могут быть предусмотрены для обеспечения более плавного движения. В то время как на схеме представлены двигатели 72, 74, установленные на соответствующих головках 12, 14 детектора, можно использовать другие движущиеся устройства, такие как двигатель для каждой головки детектора, установленный неподвижно на раме 16 и функционально соединенный с соответствующей головкой детектора с помощью приводной цепи, приводного ремня, или другого механического соединения. В представленном варианте воплощения головки 12, 14 детектора движутся горизонтально таким образом, что двигатели 72, 74, или другие движущие устройства могут быть малыми и недорогими. Адаптация к различным габаритам субъекта выполняется простым и понятным способом путем размещения субъекта на стуле или другой опоре субъекта как можно ближе к центру SC сканирования или путем расположения стоя как можно ближе к центру SC сканирования, если не предусмотрена опора для субъекта. Информация об угловом положении субъекта (например, угол α на Фиг.6) может быть предусмотрена в системе с помощью ручки 76 или другой метки, расположенной впереди пациента. Угловой диапазон головок 12, 14 детектора во время формирования изображения представляет собой единственную другую адаптацию габарита и может быть задан непосредственно программным способом. Детекторы 12, 14 излучения могут быть выполнены малыми таким образом, что позволяет расположить эти детекторы ближе к субъекту, так чтобы улучшить пространственную разрешающую способность и эффективность системы. По сравнению с существующими камерами, в которых используются эллиптические орбиты головок детекторов и расстояние от субъекта до коллиматора составляет 2 см, ожидается, что более плотный контакт, обеспечиваемый камерой 10, обеспечит повышение эффективности системы в среднем на 30% при такой же пространственной разрешающей способности для малых и больших пациентов SS, SXL. Когда субъект находится в положении сидя или стоя, используют малые головки детектора, давая возможность камере 10 иметь малое посадочное место. Оптимизированное получение данных с использованием независимого движения головки детектора, как описано со ссылкой на Фиг.2-4, непосредственно используется совместно с пассивно ограниченным движением головки детектора, ограниченным пассивными ограничителями R1, R2, T1, T2. Или угловое получение типа "пошаговой съемки" или непрерывное получение в режиме списка можно использовать с компоновкой пассивного ограничителя. Обычные технологии реконструкции можно использовать совместно с обычными коллиматорами с цилиндрическими отверстиями. При использовании комбинации относительно малых головок 12, 14 детектора Ангера и недорогих пассивных ограничителей, таких как кулачки, ролики, шариковые подшипники, дорожки, канавки или тому подобное, обеспечивается система с малой стоимостью. Камеру 10 также используют совместно с детекторами SPECT типа CZT (z-преобразование с линейной частотной модуляцией) или на основе SiPM (Silicon Photomultiplier, кремниевый фотоумножитель), поскольку область активного детектора может быть малой, например 30 см × 20 см. Такие детекторы могут быть выполнены меньшими, чем в камере Ангера, что позволяет дополнительно уменьшить габариты. Камера 10, в случае необходимости, может быть построена как движущее устройство, например на колесиках или роликах, что позволяет перемещать камеру 10 к субъекту, находящемуся в помещении интенсивного лечения, в травматическом центре, в помещении скорой помощи или в других помещениях, в которых можно формировать изображение критически больных пациентов.
Изобретение было описано со ссылкой на предпочтительные варианты его воплощения. Другие лица могут предусмотреть модификации и изменения после чтения и понимания предыдущего подробного описания. Предполагается, что изобретение следует рассматривать, как включающее в себя все такие модификации и изменения, если только они находятся в пределах объема приложенной формулы изобретения или ее эквивалентов.
Изобретение относится к области формирования изображения. В частности, оно находит применение при формировании нуклеарных медицинских изображений и относится к устройствам для его выполнения. Сущность изобретения заключается в том, что мгновенную скорость или время выдержки получения данных головки (14, 16) детектора оптимизируют как функцию положения вдоль пути (Р) головки детектора вокруг субъекта (S, SS, SXL). Оптимизацию выполняют в отношении ожидаемого профиля (EPROI) радиоактивного излучения области (H, HS, НXL), представляющей интерес, которая меньше, чем весь субъект. Головка детектора перемещается вдоль пути, используя оптимизированную мгновенную скорость или время выдержки получения данных (40). Во время перемещения получают данные формирования изображения, используя головку детектора. Полученные данные формирования изображения реконструируют для генерирования реконструированного изображения, по меньшей мере, области, представляющей интерес. Технический результат - повышение точности и быстроты итеративной реконструкции изображения. 5 н. и 31 з.п. ф-лы, 7 ил.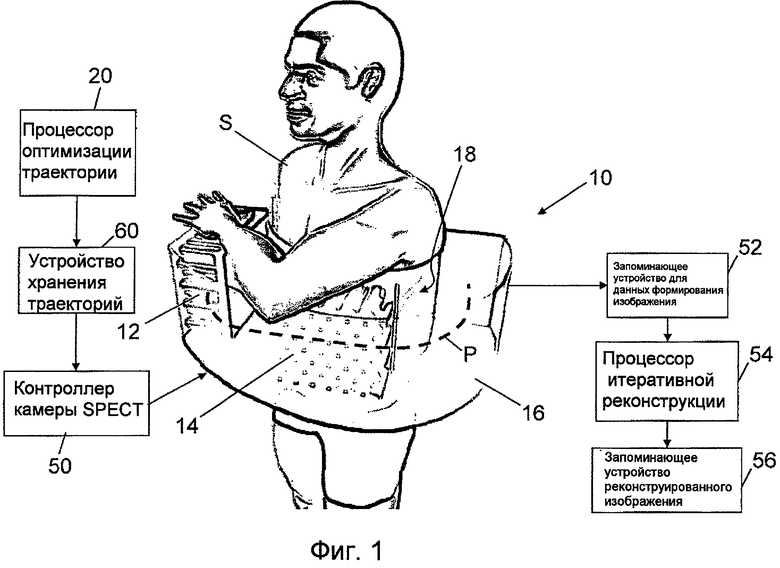
1. Способ формирования изображения, содержащий этапы на которых:
оптимизируют мгновенную скорость или время выдержки получения данных головки (12, 14) детектора как функцию положения вдоль пути (Р) головки детектора вокруг субъекта (S, SS, SXL), причем оптимизация соответствует профилю ожидаемого радиоактивного излучения (EPROI) области (Н, HS, НXL), представляющей интерес, которая меньше, чем весь субъект;
перемещают головку детектора вдоль пути, используя оптимизированную мгновенную скорость или время (40) выдержки получения данных;
во время перемещения получают данные формирования изображения, используя головку детектора; и
реконструируют полученные данные формирования изображения для генерирования реконструированного изображения, по меньшей мере, области, представляющей интерес.
2. Способ формирования изображения по п.1, в котором область (Н, НS, HXL), представляющая интерес, расположена асимметрично относительно субъекта (S, SS, SXL).
3. Способ формирования изображения по п.1, в котором субъект (S, SS, SXL) представляет собой человека и область (Н, HS, HXL), представляющая интерес, представляет собой сердечную мышцу.
4. Способ формирования изображения по п.1, в котором реконструкция включает в себя:
реконструируют полученные данные формирования изображения, используя алгоритм реконструкции максимизации ожидания упорядоченного подмножества (OS-EM).
5. Способ формирования изображения по п.1, в котором головка детектора включает в себя множество головок (12, 14) детектора, оптимизация включает в себя независимую оптимизацию мгновенной скорости или времени выдержки получения данных каждой головки детектора вдоль пути (Р), которому следует головка детектора, и выполняют реконструкцию с общим набором данных, в котором скомбинированы данные формирования изображения, полученные от множества головок детектора.
6. Способ формирования изображения по п.5, в котором независимая оптимизация включает в себя:
ограничивают независимую оптимизацию для исключения столкновения головок (12, 14) детектора.
7. Способ формирования изображения по п.5, в котором реконструкция включает в себя:
реконструируют общий набор данных, используя итеративный алгоритм реконструкции, который итеративно обрабатывает выбранные подмножества общего набора данных.
8. Способ формирования изображения по п.1, в котором оптимизация включает в себя:
получают предварительные данные формирования изображения, используя головку (12, 14) детектора; и определяют ожидаемый профиль (EPROI) радиоактивного излучения области (Н, HS, HXL), представляющей интерес, на основе полученных предварительных данных формирования изображения.
9. Способ формирования изображения по п.1, в котором дополнительно:
определяют ожидаемый профиль (EPROI) радиоактивного излучения области (Н, HS, НXL), представляющей интерес, на основе распределения (22) радиоактивного индикатора и карты (24) поглощения.
10. Способ формирования изображения по п.9, в котором дополнительно:
извлекают карту (24) поглощения из информации поглощения, полученной, используя формирование изображения с помощью трансмиссионной компьютерной томографии.
11. Способ формирования изображения по п.1, в котором дополнительно:
во время перемещения регулируют мгновенную скорость или время выдержки получения данных на основе разницы между полученными данными формирования изображения и ожидаемыми данными формирования изображения, от ожидаемого профиля (EPROI) радиоактивного излучения области (Н, HS, НXL), представляющей интерес, субъекта (S, SS, SXL).
12. Способ формирования изображения по п.1, в котором оптимизацию, перемещение и получение данных выполняют как интегрированный процесс, включающий в себя:
первично перемещают головку (12, 14) детектора вокруг субъекта (S, SS, SXL) вдоль пути (Р), используя первую траекторию;
во время первого перемещения получают первые данные формирования изображения, используя головку детектора;
определяют один или больше угловых интервалов, в которых не достаточно первых данных формирования изображения;
вторично перемещают головку детектора вдоль, по меньшей мере, участка пути, включающего в себя один или больше угловых интервалов, в которых не достаточно первых данных формирования изображения, используя оптимизированную мгновенную скорость и время выдержки получения данных; и
во время второго перемещения получают дополняющие данные формирования изображения, по меньшей мере, в одном или больше угловых интервалах, в которых не достаточно первых данных изображения.
13. Способ формирования изображения по п.1, в котором путь (Р) имеет непостоянное расстояние от области (Н, HS, HXL), представляющей интерес, причем головка детектора включает в себя множество головок (12, 14) детектора, и оптимизация включает в себя:
независимую оптимизацию мгновенной скорости или времени выдержки получения данных каждой головки детектора вдоль пути, по которому следует головка детектора, для достижения, по существу, одинакового подсчета радиоактивных событий области, представляющей интерес, для каждого углового интервала или времени выдержки получения данных вдоль пути.
14. Способ формирования изображения по п.1, в котором оптимизация включает в себя:
извлекают значение (40) оптимизированной мгновенной скорости или времени выдержки получения данных из устройства (60) хранения данных, причем извлеченное значение оптимизированной мгновенной скорости или времени выдержки получения данных заранее определяют так, чтобы они были оптимизированы относительно ожидаемого профиля (EPROI) радиоактивного излучения области (Н, HS, НXL), представляющей интерес.
15. Способ формирования изображения по п.14, в котором оптимизация дополнительно включает в себя:
определяют размер области (Н, HS, НXL), представляющей интерес; и выбирают значение (40) оптимизированной мгновенной скорости или времени выдержки получения данных для извлечения данных на основе определенного размера.
16. Способ формирования изображения по п.1, в котором дополнительно:
выбирают путь (Р) из множества выбираемых путей.
17. Способ формирования изображения по п.1, в котором перемещение включает в себя:
перемещают вдоль пути (Р) множество раз в направлении назад и вперед.
18. Гамма-камера (10), выполненная с возможностью выполнения способа по п.1.
19. Гамма-камера (10), содержащая:
одну или больше головок (12, 14) детектора и
раму (16), выполненную с возможностью передвижения одной или больше головок детектора вдоль пути (Р) головки детектора с управляемой переменной скоростью или управляемым временем выдержки получения данных.
20. Гамма-камера (10) по п.19, в которой путь (Р) головки детектора, в общем, является эллиптическим и рама (16) включает в себя:
по меньшей мере, внешнюю эллиптическую стенку (18), по существу, соответствующую по форме как эллиптическому пути, так и форме торса человека.
21. Гамма-камера (10) по п.19, в которой рама (16) включает в себя:
конформную стенку (18), находящуюся в контакте с субъектом (S, SS, SXL), изображение которого формируют с помощью гамма-камеры, причем одна или больше головок (12, 14) детектора находится близко или в контакте с внутренней частью конформной стенки.
22. Гамма-камера (10) по п.19, в которой одна или больше головок детектора включает в себя, по меньшей мере, две головки (12, 14) детектора и рама (16) выполнена с возможностью (i) получения данных формирования изображения, использующего, по меньшей мере, две головки детектора, и (ii) во время получения данных формирования изображения эти две или больше головки детектора передвигают с переменной скоростью с, по существу, независимым управлением или временем выдержки получения данных с независимым управлением.
23. Гамма-камера (10) по п.19, дополнительно включающая в себя:
контроллер (50), выполненный с возможностью управления гамма-камерой для получения данных формирования изображения при независимом движении одной или больше головок (12, 14) детектора, используя мгновенную скорость или время выдержки получения данных, которые оптимизированы в отношении ожидаемого профиля (EPROI) радиоактивного излучения области (Н, HS, НXL), представляющей интерес, субъекта (S, SS, SXL), которая меньше, чем весь субъект; и процессор (54) итеративной реконструкции, выполненный с возможностью итеративной реконструкции полученных данных формирования изображения для генерирования реконструированного изображения, по меньшей мере, области, представляющей интерес.
24. Гамма-камера (10) по п.19, в которой путь (Р) головки детектора является не круглым и не полукруглым и имеет изоцентр, по существу, совпадающий с областью (Н, HS, НXL), представляющей интерес, расположенной со смещением от изоцентра субъекта (S, SS, SXL,), содержащего область, представляющую интерес.
25. Гамма-камера (10) по п.24, в которой субъект представляет собой человеческий субъект (S, SS, SXL,) и область, представляющая интерес, представляет собой сердце (Н, HS, HXL) субъекта.
26. Гамма-камера (10) по п.19, дополнительно включающая в себя:
пассивные ограничители (R1, R2, T1, T2), которые ограничивают одну или больше головок детектора (12, 14) вдоль пути (Р) так, что при этом чувствительные к излучению стороны одной или больше головок (12, 14) детектора постоянно, в общем, обращены к области, представляющей интерес.
27. Гамма-камера (10) по п.26, дополнительно включающая в себя:
один двигатель (72, 74), независимо приводящий в движение каждую из головок (12, 14) детектора.
28. Способ формирования изображения, содержащий этапы, на которых:
одновременно перемещают множество головок (12, 14) детектора вокруг субъекта (S, SS, SXL), расположенного со смещением, вдоль пути (Р), и передвижение выполняют с разными мгновенными скоростями или с разными значениями времени выдержки получения данных;
независимо оптимизируют мгновенную скорость или времена выдержки получения данных каждой головки детектора вдоль пути, по которому следует головка детектора для достижения, по существу, одинакового подсчета радиоактивных событий области, представляющей интерес, для каждого углового интервала или времени выдержки получения данных вдоль пути;
во время перемещения получают данные формирования изображения, используя множество головок детектора; и
реконструируют полученные данные формирования изображения для генерирования реконструированного изображения, по меньшей мере, области (Н, НS, НXL), представляющей интерес, субъекта.
29. Способ формирования изображения по п.28, в котором дополнительно:
для каждой головки (12, 14) детектора выбирают профиль мгновенной скорости или времени (40) выдержки получения данных вдоль пути (Р) для получения, по существу, одинакового числа подсчетов событий излучения, испускаемого из области (Н, HS, НXL), представляющей интерес, для каждого из множества равных угловых интервалов вдоль пути.
30. Способ формирования изображения по п.29, в котором область (Н, HS, НXL), представляющая интерес, субъекта (S, SS, SXL) меньше, чем весь субъект.
31. Способ формирования изображения по п.28, в котором дополнительно:
располагают субъект (SS, SXL), рядом с центром (SC) сканирования и
определяют угловой диапазон одновременного перемещения на основе размера субъекта, причем угловой диапазон обычно меньше для малых субъектов, определяют угловой диапазон так, чтобы его центрировать приблизительно в центре сканирования.
32. Способ формирования изображения по п.31, в котором дополнительно:
определяют размер субъекта на основе углового положения (а) субъекта.
33. Гамма-камера (10), содержащая:
по меньшей мере, одну головку (12, 14) детектора, расположенную на раме (16);
пассивные ограничители (R1, R2, T1, T2), которые ограничивают, по меньшей мере, одну головку (12, 14), детектора для передвижения вдоль пути (Р) в или на раме так, что при этом сторона, чувствительная к излучению, по меньшей мере, одной из головок (12, 14) детектора, обращена к области, представляющей интерес;
элемент (76), выполненный с возможностью определения размера субъекта (S, SS, SXL); и
процессор (50), выполненный с возможностью передвижения, по меньшей мере, одной головки (12, 14) детектора вдоль пути (Р) в угловом диапазоне, выбранном на основе определенного размера, причем рама (16) имеет размеры для приема большого субъекта (SXL); и выбранный угловой диапазон выполнен меньшим для меньшего субъекта (SS), чем большой субъект (SXL).
34. Гамма-камера (10) по п.33, в которой пассивные ограничители включают в себя;
по меньшей мере, одну направляющую или дорожку (T1, T2), расположенную в или на раме; и
по меньшей мере, одно соединение, расположенное с, по меньшей мере, одной головкой (12, 14) детектора и функционально соединенное с, по меньшей мере, одной направляющей или дорожкой (T1, T2).
35. Гамма-камера (10) по п.33, дополнительно включающая в себя:
одно движущее устройство (72, 74) на головку (12, 14) детектора, функционально соединенное с соответствующей головкой детектора для передвижения головки детектора вдоль пути (Р), ограниченного пассивными ограничителями (R1, R2, T1, T2).
36. Гамма-камера (10) по п.33, дополнительно включающая в себя:
по меньшей мере, одно движущее устройство (72, 74) на головку (12, 14) детектора, функционально соединенное с, по меньшей мере, одной головкой детектора, для передвижения, по меньшей мере, одной головки детектора вдоль пути (Р), ограниченного пассивными ограничителями (R1, R2, T1, T2);
контроллер (50), выполненный с возможностью управления, по меньшей мере, одним движущим устройством на головку детектора, независимо передвигающим каждую голову детектора для получения данных формирования изображения, используя мгновенную скорость или время выдержки получения данных, оптимизированное в отношении ожидаемого профиля (EPPOI) радиоактивного излучения области (Н, HS, HXL), представляющей интерес, субъекта (S, SS, SXL); которая меньше чем весь субъект; и
процессор (54) итеративной реконструкции, выполненный с возможностью итеративной реконструкции полученных данных формирования изображения для генерирования реконструированного изображения, по меньшей мере, области, представляющей интерес.
| US 20060000983 A1, 05.01.2006 | |||
| US 5097131 A, 17.03.1992 | |||
| US 5598003 A, 28.01.1997 | |||
| ГАММА-КАМЕРА С ПРЯМОУГОЛЬНЫМ ПОЛЕМ ВИДЕНИЯ | 1999 |
|
RU2151552C1 |

