Изобретение относится к автоматическому управлению и регулированию и может быть использовано для экспериментального описания свойств объекта и построения моделей, описывающих поведение объекта с переменной структурой в условиях действия технологических изменений во времени входных величин управления (технологической программы управления) для циклических и непрерывных объектов в действующих системах управления.
Известен комплекс методов идентификации объектов в системах управления с применением псевдослучайных (ПС) сигналов, образованных на основе последовательностей максимальной длительности (см. Теория и применение псевдослучайных сигналов / Алексеев А.И., Шереметьев А.Г., Тузов Г.И., Глазов Б.И. // - «Наука», 1969). Под псевдослучайной последовательностью понимают последовательность p-ичных цифр, генерируемую регистром сдвига с соответствующей обратной связью. Псевдослучайными (шумоподобными) они называются по той причине, что несмотря на регулярную структуру обладают почти всеми признаками реализации случайных последовательностей. Кроме того, автокорреляционная функция ПС-сигнала, образованного в соответствии с двоичной последовательностью (p=2), напоминает функцию автокорреляции белого шума, т.е. δ-функцию. В системах измерения параметров движения ПС-сигналы обеспечивают максимальную точность измерения дальности и скорости, поскольку их диаграмма неопределенности практически оптимальна. Как известно, δ-функции используются для идентификации объектов в системах управления.
Идентификацию объектов в действующих системах управления осуществляют единовременно в период настройки систем поддержки принимаемых решений человека-оператора, либо периодически для супервизорной адаптации настроек используемых моделей объектов. Таким образом, во втором случае периоды управления объектами в обычном режиме чередуются с периодами активной идентификации этих объектов. В период идентификации объектов управление ими осуществляется в режиме подачи на вход скрытых или открытых ПС-сигналов.
Недостаток: под действием нанесенных на объект активных испытательных воздействий могут существенно меняться свойства этого объекта. Собственного влияния программы изменения испытательного (пробного) воздействия на результаты идентификации свойств объекта способ не учитывает. При этом результаты идентификации для одного и того же объекта могут оказаться существенно различными.
Наиболее близким по технической сущности к предлагаемому является способ идентификации объектов в действующих системах, включающий фиксирование траекторий изменения входных и выходных переменных во времени и оценку динамических характеристик исследуемых каналов регулирования по разности траекторий изменения во времени спрогнозированных и фактически полученных временных зависимостей выходных величин объекта, по разности траектории изменения во времени спрогнозированных и фактически реализованных временных зависимостей управлений, по оценкам ошибок прогнозирования и регулирования, предварительно идентифицированному каналу возмущения, причем оценку коэффициента передачи по каналу регулирования находят по формуле (SU №2325683 G058 13/04, 2008).
К недостатку способа относится то, что он не позволяет идентифицировать влияние технологических изменений во времени входных величин управления на динамические характеристики канала регулирования объекта с переменной структурой.
Задачей изобретения является идентификация влияния технологических изменений во времени входных величин управления на динамические характеристики канала регулирования объекта с переменной структурой, что повышает качество экспериментального изучения объекта.
Это достигается тем, что в способе идентификации влияния технологических изменений во времени входных величин управления на динамические характеристики канала регулирования объекта с переменной структурой, включающем проведение первого эксперимента - серии параллельных опытов - циклов работы объекта по снятию кривых разгона объекта (изменения во времени выходной величины объекта под действием скачкообразного изменения входной величины) по каналу регулирования без подачи технологических изменений во времени входных величин управления и второго эксперимента - серии параллельных опытов - циклов работы объекта с подачей технологических изменений во времени входных величин управления, в ходе каждого опыта вначале в течение определенного времени фиксируют сигнал на выходе объекта без подачи на его входы каких-либо организованных воздействий, затем на объект подают скачкообразный сигнал по каналу регулирования и технологические изменения во времени входных величин управления, фиксируя далее сигнал на выходе объекта вплоть до окончания переходных процессов, причем регулирующее воздействие изменяют либо одновременно с началом подачи технологической программы управления на объект, либо позже, причем во всех повторениях опытов каждого из экспериментов это запаздывание устанавливают одинаковым, после завершения каждого эксперимента кривые разгона, полученные в опытах, усредняют, усредненную кривую разгона первого эксперимента совмещают по моменту изменения регулирующего воздействия с усредненной кривой разгона второго эксперимента и вычитают первую усредненную кривую разгона из второй с получением итоговой кривой разгона, отражающей влияние во времени технологической программы управления на выходную величину объекта по изучаемому каналу регулирования, полученную итоговую кривую разгона сглаживают с выделением на ней старого и нового установившегося уровней и оценивают динамические характеристики влияния технологической программы управления по изучаемому каналу регулирования на выходную величину объекта, при этом условный коэффициент передачи по каналу «Влияние технологических изменений во времени входных величин управления на изменение выходной величины объекта» определяют по выражению:

 - значение старого установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта - до моментов подачи, как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления;
- значение старого установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта - до моментов подачи, как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления;
Δt≥0 - запаздывание момента изменения регулирующего воздействия по отношению к началу подачи технологической программы управления;
 - значение нового установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта - после подачи, как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления.
- значение нового установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта - после подачи, как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления.
На фиг.1 приведена итоговая кривая разгона по данным экспериментов, проведенным на объекте исследования.
На фиг.1 обозначено: 1 - технологические изменения во времени входных величин управления; 2 - скачкообразный сигнал по каналу регулирования, то есть траектория изменения во времени входной переменной объекта исследования; 3 - усредненная кривая разгона первого эксперимента - кривая изменения во времени выходной величины объекта под действием скачкообразного изменения входной величины объекта по каналу регулирования без подачи технологической программы управления; 4 - усредненная кривая разгона второго эксперимента - кривая изменения во времени выходной величины объекта под действием скачкообразного изменения входной величины объекта по каналу регулирования с подачей технологической программы управления; 5 - сглаженная итоговая кривая разгона объекта; Uпp - параметр, изменяемый технологической программой управления во времени; Up - регулирующее воздействие по изучаемому каналу регулирования; Δt - запаздывание момента изменения регулирующего воздействия по отношению к началу подачи технологической программы управления; - значение старого установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта - до моментов подачи, как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления; - значение нового установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта - после подачи, как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления.
После проведения экспериментов на исследуемом объекте и получения сглаженной итоговой кривой разгона объекта 5 (Фиг.1) по формуле (1) определяются не обычные динамические характеристики, а условные, т.к. эти характеристики будут зависеть от того, какое будет Δt - запаздывание момента изменения регулирующего воздействия по отношению к началу подачи технологической программы управления. По мере воздействия технологических изменений во времени входных величин управления свойства самого объекта изменяются!
В качестве объекта выступает объект с переменной структурой. Технологические изменения во времени входных величин управления меняют структуру самого объекта. Характерным примером такого объекта является ковш с расплавом стали и шлака в процессе внепечной обработки стали - при продувке расплава нейтральным газом через погружную футерованную фурму. Технологические изменения во времени входных величин управления представляют собой изменение положения фурмы в ковше во время продувки. Это положение изменяется по определенной программе, что способствует ускорению процесса гомогенизации расплава стали по температуре и химическому составу. При перемещении фурмы происходит срыв ламинарности конвективных потоков движения расплава под действием поднимающихся потоков газа, исходящих из рабочего конца фурмы.
Технологические изменения во времени входных величин управления могут быть весьма различные. Чаще всего реализуются в автоматическом режиме. При этом может реализовываться тот или иной заранее выбранный вариант автоматической программы.
В качестве регулирующего воздействия в рассмотренном примере выступает, например, интенсивность продувки - расход инертного газа. В качестве выходной величины объекта может рассматриваться, например, максимальный разброс температуры расплава по всему объему ковша, то есть разность между температурой наиболее нагретой и наименее нагретой локальными областями расплава в ковше.
Каждому конструктивному расположению фурмы в ковше соответствует своя картина конвективных потоков - функции тока жидкости и кривых изменения скоростей движения расплава стали. Кроме того, при прочих равных условиях каждому такому положению фурмы соответствует свое распределение температуры и химического состава отдельных объемов расплава ковша. Если изменить положение фурмы, например приподнять ее, то в системе «ковш-фурма-расплав» начнется переходный процесс. Если же положение фурмы изменяется по программе, то в системе «ковш-фурма-расплав» конструктивно будет иметь место определенная последовательность во времени различных объектов. Переходные процессы от по существу разных объектов будут накладываться. Причем результат наложения нельзя получить простым суммированием, т.к. наблюдается эффект усиления влияния технологической программы. Причем сам эффект усиления не остается постоянным. Дело в том, что при этом меняется сама последовательность новых (сменяемых) объектов! Сама кривая разгона представляет собой сложную кривую (как сумма нескольких взаимообуславливающих кривых). Влияние от каждого нового состояния объекта, возникающего при изменении его структуры, как правило, до конца реализовываться не успевает. Система не успевает приходить в новое установившееся состояние, как наступает новое изменение технологической программы. Кривые разгона от по существу разных объектов будут накладываться. В рассмотренном выше примере это благоприятно сказывается на свойствах самого объекта, т.к. способствует выходу конвективных потоков расплава из ламинарного состояния. Оказывается возможным измерить лишь интегральный, обобщенный результат. По этим причинам получение описания в общем является затруднительным.
Поскольку измеряемые динамические характеристики объекта оказываются условными, то они имеют смысл только для данной технологической программы. При этом теряется общность получаемых динамических описаний объекта. Изучить динамические характеристики объекта с переменной структурой возможно только для конкретной технологической программы. Поэтому в качестве необходимого условия эксперимента необходимо фиксировать технологические изменения во времени входных величин управления.
Способ реализуется следующим образом.
1. В первом эксперименте несколько раз снимают кривую разгона объекта по каналу регулирования без технологической программы управления. Полученные кривые усредняют.
2. Во втором эксперименте несколько раз снимают кривую разгона объекта по каналу регулирования с технологической программой, причем входной сигнал по каналу регулирования меняют скачком одновременно или после подачи на объект технологической программы управления. Полученные кривые усредняют.
3. Первую усредненную кривую вычитают из второй, тем самым находят усредненную кривую разгона влияния технологической программы на переходную характеристику по изучаемому каналу регулирования. Полученную итоговую кривую разгона сглаживают.
4. На сглаженной итоговой кривой разгона выделяют старый и новый установившиеся уровни. находят как значение установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта, которое имело место до моментов подачи, как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления. находят как значение установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта, которое имело место после подачи, как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления.
5. Оценивают динамические свойства влияния технологической программы по изучаемому каналу регулирования на выходные переменные объекта. Так условный коэффициент передачи по каналу «Влияние технологической программы управления на изменение выходной величины объекта» определяют по выражению (1).
Число повторений опытов n в экспериментах должно быть таким, чтобы далее позволить надежно выявить эффекты влияния на объект регулирующего воздействия и технологической программы управления: n≥5. При этом меньшее значение соответствует меньшей дисперсии помехи. Чем разброс экспериментально снятых кривых разгона в пределах данного эксперимента будет выше, тем больше число необходимых опытов.
Достоинство способа - его относительная простота. Он может применяться для объектов с переменной структурой различной природы, для которых применяются технологические программы управления: металлургических агрегатов, мешалок с интеллектуальным управлением, псевдоожижителей, систем вентиляции с переменным положением лопаток и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФРАГМЕНТАЛЬНОГО УПРАВЛЕНИЯ И ИДЕНТИФИКАЦИИ КАНАЛА РЕГУЛИРОВАНИЯ СОСТОЯНИЯ ОБЪЕКТА В ДЕЙСТВУЮЩЕЙ СИСТЕМЕ | 2007 |
|
RU2327197C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ДЕЙСТВУЮЩИХ ОБЪЕКТОВ В СИСТЕМАХ УПРАВЛЕНИЯ | 2004 |
|
RU2277259C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ КАНАЛОВ РЕГУЛИРОВАНИЯ ОБЪЕКТОВ С НАНЕСЕНИЕМ ПРОБНЫХ СИГНАЛОВ НА ПРОГНОЗИРУЕМЫЕ РАБОЧИЕ УПРАВЛЕНИЯ | 2004 |
|
RU2271561C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ СОПРЯЖЕННЫХ КАНАЛОВ РЕГУЛИРОВАНИЯ РАСПРЕДЕЛЕННЫХ ОБЪЕКТОВ | 2006 |
|
RU2326422C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ В ДЕЙСТВУЮЩИХ СИСТЕМАХ | 2006 |
|
RU2325683C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ С ИЗМЕНЕНИЕМ ЗАДАНИЙ | 2004 |
|
RU2276396C2 |
| СПОСОБ АКТИВНО-ПАССИВНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ СО СМЕНОЙ ДЕЙСТВУЮЩИХ СИСТЕМ УПРАВЛЕНИЯ ОБЪЕКТАМИ | 2010 |
|
RU2459227C1 |
| Автоматический нейросетевой настройщик параметров ПИ-регулятора для управления нагревательными объектами | 2016 |
|
RU2644843C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
Изобретение относится к автоматическому управлению и регулированию. Техническим результатом является идентификация влияния технологических изменений во времени входных величин управления на динамические характеристики канала регулирования объекта с переменной структурой. Он достигается тем, что в ходе каждого опыта вначале в течение определенного времени фиксируют сигнал на выходе объекта без подачи на его входы каких-либо организованных воздействий, затем на объект подают скачкообразный сигнал по каналу регулирования и технологическую программу управления, фиксируя далее сигнал на выходе объекта вплоть до окончания переходных процессов, причем регулирующее воздействие изменяют либо одновременно с началом подачи технологической программы управления на объект, либо позже, причем во всех повторениях опытов каждого из экспериментов это запаздывание устанавливают одинаковым, после завершения каждого эксперимента кривые разгона, полученные в опытах, усредняют, усредненную кривую разгона первого эксперимента совмещают по моменту изменения регулирующего воздействия с усредненной кривой разгона второго эксперимента и вычитают первую усредненную кривую разгона из второй с получением итоговой кривой разгона, полученную итоговую кривую разгона сглаживают с выделением на ней старого и нового установившегося уровней и оценивают динамические характеристики влияния технологической программы управления по изучаемому каналу регулирования на выходную величину объекта. 1 ил.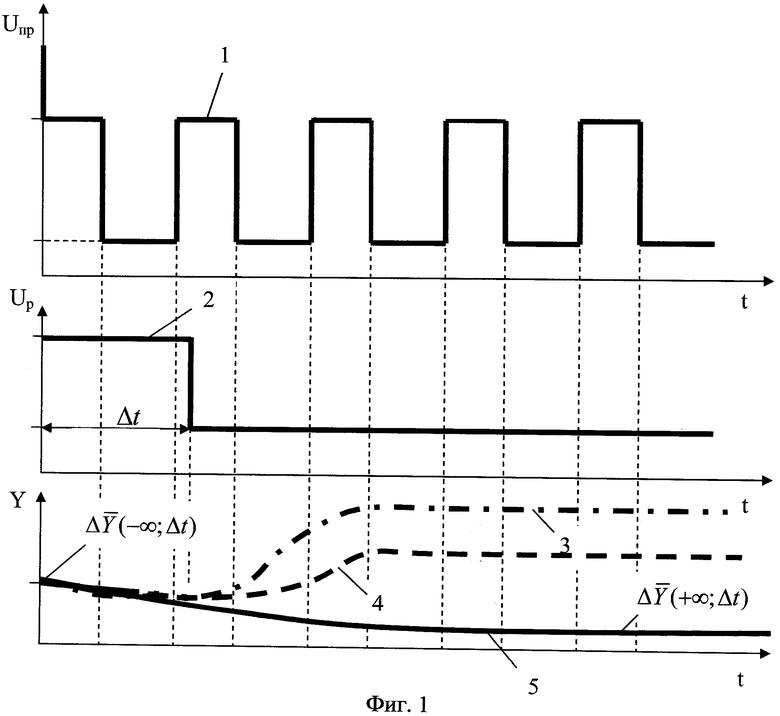
Способ идентификации влияния технологических изменений во времени входных величин управления на динамические характеристики канала регулирования объекта с переменной структурой, включающий проведение первого эксперимента - серии параллельных опытов - циклов работы объекта по снятию кривых разгона объекта (изменения во времени выходной величины объекта под действием скачкообразного изменения входной величины) по каналу регулирования без подачи технологической программы управления и второго эксперимента - серии параллельных опытов - циклов работы объекта с подачей технологической программы управления, отличающийся тем, что в ходе каждого опыта вначале в течение определенного времени фиксируют сигнал на выходе объекта без подачи на его входы каких-либо организованных воздействий, затем на объект подают скачкообразный сигнал по каналу регулирования и технологическую программу управления, фиксируя далее сигнал на выходе объекта вплоть до окончания переходных процессов, причем регулирующее воздействие изменяют либо одновременно с началом подачи технологической программы управления на объект, либо позже, причем во всех повторениях опытов каждого из экспериментов это запаздывание устанавливают одинаковым, после завершения каждого эксперимента кривые разгона, полученные в опытах усредняют, усредненную кривую разгона первого эксперимента совмещают по моменту изменения регулирующего воздействия с усредненной кривой разгона второго эксперимента и вычитают первую усредненную кривую разгона из второй с получением итоговой кривой разгона, отражающей влияние во времени технологической программы управления на выходную величину объекта по изучаемому каналу регулирования, полученную итоговую кривую разгона сглаживают с выделением на ней старого и нового установившегося уровней и оценивают динамические характеристики влияния технологической программы управления по изучаемому каналу регулирования на выходную величину объекта, при этом условный коэффициент передачи по каналу «Влияние технологической программы управления на изменение выходной величины объекта» определяют по выражению
 ,
,
где  - значение старого установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта - до моментов подачи как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления;
- значение старого установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта - до моментов подачи как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления;
Δt≥0 - запаздывание момента изменения регулирующего воздействия по отношению к началу подачи технологической программы управления;
 - значение нового установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта - после подачи как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления.
- значение нового установившегося уровня на сглаженной итоговой кривой разгона выходной величины объекта - после подачи как регулирующего воздействия по изучаемому каналу регулирования, так и технологической программы управления.
| СПОСОБ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ В ДЕЙСТВУЮЩИХ СИСТЕМАХ | 2006 |
|
RU2325683C2 |
| СПОСОБ ФРАГМЕНТАЛЬНОГО УПРАВЛЕНИЯ И ИДЕНТИФИКАЦИИ КАНАЛА РЕГУЛИРОВАНИЯ СОСТОЯНИЯ ОБЪЕКТА В ДЕЙСТВУЮЩЕЙ СИСТЕМЕ | 2007 |
|
RU2327197C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ КАНАЛОВ РЕГУЛИРОВАНИЯ ОБЪЕКТОВ С НАНЕСЕНИЕМ ПРОБНЫХ СИГНАЛОВ НА ПРОГНОЗИРУЕМЫЕ РАБОЧИЕ УПРАВЛЕНИЯ | 2004 |
|
RU2271561C2 |
| US 6125831 A, 03.10.2000. | |||

