Изобретение относится к электрическим самонастраивающимся системам управления, а именно к области адаптивных систем управления с пробным гармоническим сигналом, и предназначено для управления химическими, энергетическими, электромеханическими и другими объектами с переменными или нестационарными параметрами.
Наиболее близким по технической сущности к предлагаемому решению является адаптивная система управления, включающая схему сравнения, первый вход которой подключен к входу адаптивной системы управления, а выход через последовательно соединенные регулятор, сумматор, объект управления к второму входу схемы сравнения, первый измеритель амплитуды и фазы, блок фазовой автоподстройки частоты, выход которого подключен к первому входу вычислительного блока и входу генератора, выход которого подключен к второму входу сумматора и второму входу первого измерителя амплитуды и фазы, первый вход которого подключен к выходу объекта управления, а выход вычислительного блока подключен к входу подстройки регулятора, второй измеритель амплитуды и фазы, первый и второй входы которого подключены к выходу сумматора и выходу генератора, соответственно, и вычислитель амплитудно-частотной характеристики, выход амплитуды которого подключен к второму входу вычислительного блока, а первый, второй, третий и четвертый входы подключены к первому и второму выходам второго измерителя амплитуды и фазы, и первому и второму выходам первого измерителя амплитуды и фазы, соответственно, выход фазы вычислителя амплитудно-частотной характеристики подключен к входу блока фазовой автоподстройки частоты (см. RU(11) 2 339 988 C1 G05B 13/02 (2006.01)).
Недостатком известной системы является недостаточно высокое быстродействие, проявляющееся в том, что при отсутствии достаточной априорной информации о структуре и инерционности объекта, начальная частота генератора пробных колебаний, задаваемая произвольно, может значительно отличаться от частоты, искомой в процессе адаптации «характерной» точки амплитудно-фазовой характеристики объекта управления, что приводит к увеличению времени самонастройки, т.е. к увеличению времени вычисления коэффициентов ПИД-регулятора, или даже к срыву самонастройки, если начальная частота находится вне полосы пропускания объекта.
Задачей изобретения и обусловленным ею техническим результатом является повышение быстродействия, за счет снижения времени самонастройки системы, улучшение сходимости процесса адаптивного ПИД-управления.
Указанный результат достигается тем, что в адаптивную систему управления, включающую схему сравнения, первый вход которой подключен к входу адаптивной системы управления, а выход через последовательно соединенные регулятор, сумматор к входу объекта управления, блок фазовой автоподстройки частоты, выход которого подключен к входу генератора гармонических колебаний, а также через вычислительный блок к второму входу регулятора, выход генератора гармонических колебаний подключен к первым входам первого и второго фильтров Фурье, первые и вторые выходы которых подключены к соответствующим входам вычислителя АФХ, введены блок вычисления стартовой частоты, первый вход которого подключен через пятый ключ к выходу объекта регулирования, а выход через третий ключ к второму входу генератора гармонических колебаний, первый вход которого объединен с вторым входом вычислительного блока, а выход через первый ключ подключен к второму входу сумматора, генератор ступенчатого сигнала, выход которого подключен к второму входу блока вычисления стартовой частоты, а также через четвертый ключ к третьему входу сумматора, первый избирательный фильтр, вход которого подключен к выходу сумматора, а выход к второму входу первого фильтра Фурье, второй избирательный фильтр, вход которого подключен к выходу объекта регулирования, а выход к второму входу второго фильтра Фурье, выход объекта регулирования подключен через второй ключ к второму входу схемы сравнения.
Кроме того, блок вычисления стартовой частоты содержит вычислитель разгонной характеристики, первый и второй входы которого подключены к первому и второму входам блока вычисления стартовой частоты, а выход через последовательно включенные сглаживающий фильтр, вычислитель КЧХ, вычислитель нормированного периода колебаний к выходу блока вычисления стартовой частоты.
Изобретение поясняется с помощью чертежей, где на Фиг.1. показана структурная схема адаптивной системы управления, на Фиг.2. - график работы адаптивной системы управления без предварительного расчета исходной частоты пробных колебаний, начало автонастройки; на Фиг.3 - график работы адаптивной системы управления без предварительного расчета исходной частоты пробных колебаний, окончание автонастройки, на Фиг.4 - график работы адаптивной системы управления с предварительным расчетом исходной частоты пробных колебаний, начало автонастройки; на Фиг.5 - график работы адаптивной системы управления с предварительным расчетом исходной частоты пробных колебаний, окончание настройки.
На чертежах сделаны следующие обозначения.
1 - схема сравнения,
2 - регулятор,
3 - сумматор,
4 - объект управления,
5 - блок фазовой автоподстройки частоты (БФАЧ),
6 - вычислительный блок,
7 - генератор гармонических колебаний (ГГК),
8 - вычислитель амплитудно-частотной характеристики (АЧХ),
9 и 10 - первый и второй фильтры Фурье, соответственно,
11 и 12 - первый и второй избирательные фильтры, соответственно,
13 - блок формирования разгонной характеристики (вычислитель разгонной характеристики),
14 - сглаживающий фильтр,
15 - вычислитель комплексной частотной характеристики (КЧХ),
16 - вычислитель нормированного периода колебаний nf (блок интерполяции),
17 - генератор ступенчатого сигнала (ГСС),
18, 19, 20, 21 и 22 - первый, второй, третий, четвертый и пятый ключи соответственно,
23 и 24 - вход и выход системы соответственно,
25 - блок вычисления стартовой частоты.
Адаптивная система управления, содержит схему сравнения, первый вход которой подключен к входу адаптивной системы управления, а выход через последовательно соединенные регулятор, сумматор к входу объекта управления, блок фазовой автоподстройки частоты, выход которого подключен к входу генератора гармонических колебаний, а также через вычислительный блок к второму входу регулятора, выход генератора гармонических колебаний подключен к первым входам первого и второго фильтров Фурье, первые и вторые выходы которых подключены к соответствующим входам вычислителя АЧХ, блок вычисления стартовой частоты, первый вход которого подключен через пятый ключ к выходу объекта регулирования, а выход через третий ключ к второму входу генератора гармонических колебаний, первый вход которого объединен с вторым входом вычислительного блока, а выход через первый ключ подключен к второму входу сумматора, генератор ступенчатого сигнала, выход которого подключен к второму входу блока вычисления стартовой частоты, а также через четвертый ключ к третьему входу сумматора, первый избирательный фильтр, вход которого подключен к выходу сумматора, а выход к второму входу первого фильтра Фурье, второй избирательный фильтр, вход которого подключен к выходу объекта регулирования, а выход к второму входу второго фильтра Фурье, выход объекта регулирования подключен через второй ключ к второму входу схемы сравнения.
Блок вычисления стартовой частоты содержит вычислитель разгонной характеристики, первый и второй входы которого подключены к первому и второму входам блока вычисления стартовой частоты, а выход через последовательно включенные сглаживающий фильтр, вычислитель комплексной частотной характеристики, вычислитель нормированного периода колебаний к выходу блока вычисления стартовой частоты.
Адаптивная система управления работает следующим образом.
Адаптивная система управления реализует двухэтапную процедуру настройки, которая, как и прототип, представляющий собой адаптивный ПИД-регулятор, предполагает безыдентификационный подход к формированию алгоритма адаптации, т.е. без построения явной модели объекта.
Дополнительный этап заключается в предварительном определении искомой «характерной» точки частотной характеристики объекта (или ее малой окрестности). Данная задача решается путем подачи на вход объекта прямоугольного скачка (ступенчатого сигнала) при размыкании обратной связи в системе. Снятая с выхода объекта разгонная характеристика пересчитывается в комплексную частотную характеристику, из массива значений которой находится искомая «характерная» точка АФХ. Полученное значение частоты принимается за начальное. Далее выполняется второй этап самонастройки, который заключается собственно в поиске «характерной» точки АФХ объекта и расчете настроек ПИД-регулятора.
Настройка системы осуществляется по одной точке АФХ объекта. В качестве характерной точки АФХ объекта управления используется точка с фазовым сдвигом - 2.11 рад. Вычисление параметров регулятора по вектору АФХ с аргументом - 2.11 рад позволяет получать настройки, близкие к оптимальным в смысле минимума СКО регулирования, причем даже для объектов с большим запаздыванием.
Процедура автонастройки запускается по достижении рабочего режима, т.е. когда управляемая величина достигла установившегося значения; при этом разомкнуты все ключи, изображенные на рисунке, а блок регулятора (2, фиг.1) передает входной сигнал на выход без изменений, т.е. работает по П-закону с KP=1. В этот момент на вход объекта управления (4, фиг.1), помимо задания, подается прямоугольный ступенчатый сигнал: замыкается ключ К4 на выходе генератора ступенчатого сигнала (ГСС - 17, фиг.1), также замыкаются ключи К3 и К5 в контуре вычисления начальной частоты пробных колебаний. Величина скачка Uп может варьироваться оператором; по умолчанию она составляет 20% от максимального значения управляющего воздействия. С выхода объекта снимается его разгонная характеристика, а именно ее дискретная реализация с временным интервалом, кратным периоду квантования. Накопление точек разгонной характеристики прекращается, когда величина отклонения выходного сигнала от установившегося значения превысит заданный уровень (целесообразно задать его равным величине подаваемого ступенчатого сигнала - в этом случае с выхода объекта будет полностью снят переходный процесс). Число точек кривой разгона ограничивается за счет децимации - n=500…1000. Для устранения влияния шумов в канале управления на достоверность полученных данных выполняется операция сглаживания - кривая разгона аппроксимируется полиномом 9-го порядка (14, фиг.1).
Далее, по массиву значений разгонной характеристики вычисляется набор значений комплексной частотной характеристики (КЧХ) объекта управления. Как известно, КЧХ и разгонная характеристика связаны следующим соотношением:
При вычислении данное выражение заменяется приближенным соотношением, путем перехода от производной к разности соседних значений разгонной характеристики. Число вычисляемых значений КЧХ равно числу снятых значений кривой разгона. Для большинства объектов диапазон существенных частот лежит ниже частоты, которая в 4 раза больше величины, обратной времени переходного процесса, т.е. верхнюю границу диапазона частот, для которых вычисляются значения КЧХ, можно определить как
где tпп - время переходного процесса; n - число точек снятой разгонной характеристики; Т0 - период квантования. Таким образом, значения КЧХ вычисляются вычислителем КЧХ (15, фиг.1) для массива частот  ,
,  ,…,
,…,  , ωmax формуле:
, ωmax формуле:
 ,
,
где h[k], k=0…n - массив снятых значений разгонной характеристики объекта.
Вычислителем nf (16, фиг.1) из массива значений КЧХ объекта управления выбирается ближайшее к «характерной» точке АФХ с фазовым сдвигом - 2.11 рад. Соответствующая частота принимается за начальную частоту пробного гармонического сигнала nf.
Следующий этап - определение настроек регулятора. Однократная автонастройка регулятора, как и определение начальной частоты пробных колебаний, осуществляется в разомкнутом контуре. После вычисления начальной частоты размыкается ключ К4 на выходе ГСС, также размыкаются ключи К3 и К5, и замыкается ключ К1 на выходе генератора гармонических колебаний (ГГК); данный генератор формирует синусоидальный сигнал с заданной амплитудой и частотой. Его значение на k-ом шаге работы вычисляется по формуле:
 ,
,
где А - амплитуда сигнала; nf - нормированный период колебаний, т.е. число тактов пересчета, за которое завершается один период колебаний.
Избирательный фильтр ИФ1 выделяет из входного сигнала объекта гармонику с частотой пробного сигнала, фильтр ИФ2 осуществляет аналогичную операцию над выходом объекта. Разностное уравнение избирательного фильтра имеет вид:

где xf, yf - входной и выходной сигналы ИФ соответственно (для ИФ1 xf=U, yf=Uф; для ИФ2 xf=Y, yf=Yф); коэффициенты AF, BF и CF рассчитываются по формулам:
 ,
,  ,
,  ,
,
где  , Q - добротность ИФ.
, Q - добротность ИФ.
Фильтр Фурье 1 оценивает значения амплитуды Rвх и фазы φвх пробных колебаний в отфильтрованном сигнале управления Uф. Фильтр Фурье 2 оценивает Rвых и φвых в отфильтрованном выходном сигнале Yф объекта. Вычисление оценок амплитуды и фазы фильтр Фурье осуществляет по формулам:
 ,
,  ,
,
где
 ,
,  ,
,
где x - входной сигнал фильтра Фурье (для ФФ1 x=Uф, для ФФ2 x=Yф).
Вычислитель АФХ (6, фиг.1) определяет вектор комплексной характеристики объекта Ro, φо на частоте тестового сигнала:
 ,
, 
Поиск и дальнейшее отслеживание частоты, на которой фазовый сдвиг равен φЗ=-2.11 рад, осуществляет блок фазовой автоподстройки частоты 5 (фиг.1), который по прошествии заданного числа периодов изменяет частоту пробных колебаний (нормированный период nf) в зависимости от полученного значения φo следующим образом:
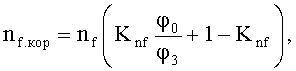
где nf - текущее значение нормированного периода колебаний; nf.кор - новое (скорректированное) значение периода; Knf - заданный коэффициент (выбирается из диапазона 0.5÷1).
Вычислительный блок (6, фиг.1) производит расчет настроек ПИД-регулятора при захвате БФАЧ фазы - 2.11 рад (используется цифровой ПИД-регулятор с независимыми настройками):
 ,
,  .
.
После вычисления настроек регулятора процесс управления можно продолжить в замкнутом контуре. При этом все вышеперечисленные действия (но уже без предварительного этапа) будут осуществляться далее непрерывно, при работе системы в замкнутом режиме. Таким образом, будет обеспечен постоянный пересчет настроек регулятора, что необходимо при управлении объектом с переменными параметрами.
Для оценки качества предлагаемого алгоритма адаптивного регулятора была разработана модель на ЭВМ в виде программы на языке высокого уровня (среда программирования Borland C++ Builder). Для получения трендов переходных процессов разработан соответствующий графический интерфейс. Задача моделирования заключалась в том, чтобы оценить влияние дополнительного этапа (определение начальной частоты пробных колебаний) на длительность и сходимость процесса автонастройки. С этой целью были получены графики переходного процесса до и после модификации алгоритма адаптивного регулятора.
Исследования проводились на модели объекта третьего порядка с запаздыванием; параметры модели: K=1; T1=0.001 с; Т2=3 с; Т3=10 с; h=0.6 с; период квантования Т0=0.165 с. «Характерной» точке АФХ данной модели соответствует период nf=134. Для исследования влияния шумов на точность получаемых результатов к выходу объекта добавлялся случайный сигнал со средней амплитудой 1.5% от максимального значения выхода объекта. Частота пробных колебаний пересчитывалась, если выполнялись следующие условия: прошло 2 периода колебаний и разница между фазовыми сдвигами, рассчитанными на каждом из этих периодов, не превышает заданного значения (т.е. завершились переходные процессы в фильтрах Фурье, и величина фазового сдвига достигла установившегося значения).
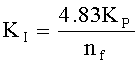
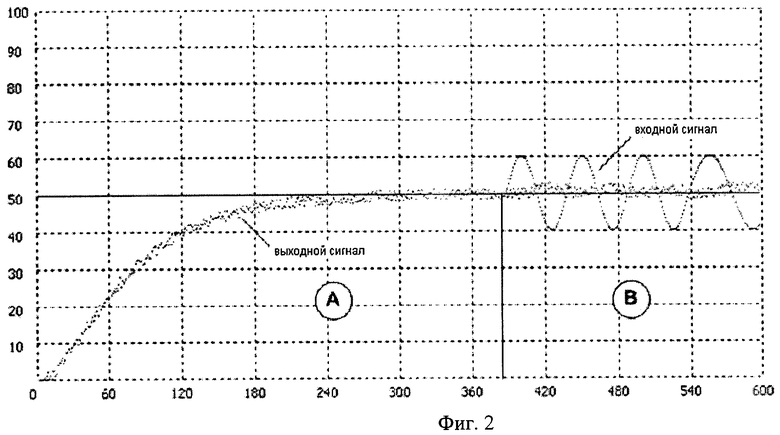
При отсутствии дополнительного этапа идентификации процесс автонастройки происходит следующим образом. Начальное значение периода nf было выбрано равным 60. На Фиг.2 и 3 приведены графики переходных процессов в системе. На графике показаны следующие стадии процесса: А - процесс выхода на рабочий режим; В - процесс самонастройки.
Как видно из Фиг.2, время автонастройки составило около 2950 тактов (по окончании автонастройки подача на вход пробных колебаний прекращается). Значение нормированного периода колебаний, при котором завершилась автонастройка: nf=133. Полученные настройки регулятора: КP=2.74; КI=0.0995; КD=15.6.
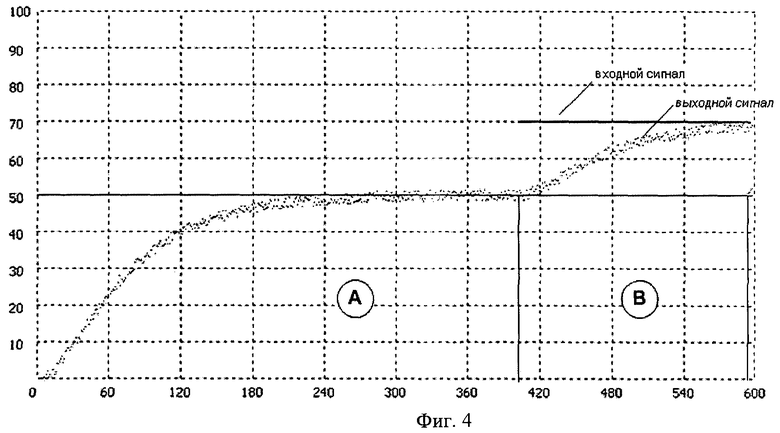
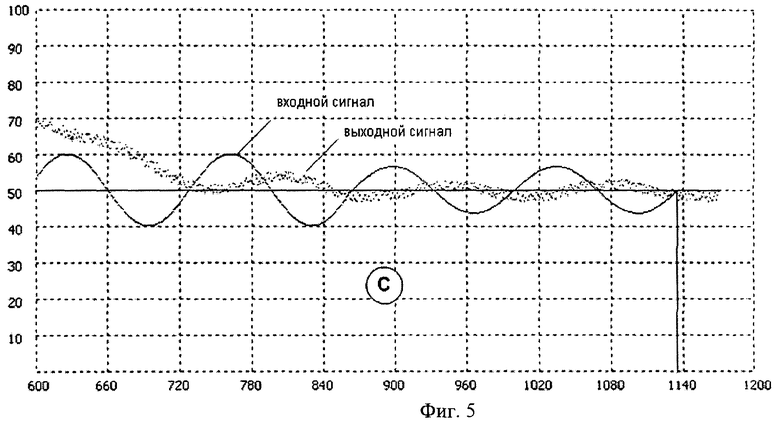
Аналогичные исследования были проведены при наличии в алгоритме автонастройки дополнительного этапа, результаты которых представлены на Фиг.4 и 5. На чертежах стадии процесса обозначены следующим образом: А - процесс выхода на рабочий режим; В - предварительный этап снятия разгонной характеристики и расчета начальной частоты колебаний; С - процесс самонастройки.
Как видно из Фиг.3, время автонастройки составило около 1140 тактов, т.е. процесс вычисления параметров регулятора по сравнению с адаптивной системой-прототипом ускорился в 2.5 раза. Значение нормированного периода колебаний, полученное после предварительного этапа: nf=136. При этом же значении nf завершилась автонастройка. Полученные настройки регулятора: КP=2.74; KI=0.0973; КD=16. Соответственно настройки ПИД-регулятора исходной и предлагаемой системы близки, т.е. дополнительный этап не повлиял на оптимизацию настроек ПИД-регулятора.
Заявленная система, реализующая алгоритм адаптивного ПИД-регулятора, может быть внедрена на промышленных предприятиях. Один из возможных путей реализации адаптивной системы регулирования - электронный микропроцессорный модуль управления с встроенным адаптивным регулятором, способным интегрироваться в управляющий микропроцессорный контроллер и расширять его функциональные возможности. Преимущество такой реализации заключается в том, что микропроцессорный контроллер в этом случае достаточно оснастить микропроцессором, не обладающим достаточным объемом оперативной памяти и быстродействием. В приложении к заявке приведена программа для ЭВМ, которая может быть использована в случае такой микропроцессорной реализации заявленного решения.
Представленные графики подтверждают работоспособность адаптивной системы управления, а также повышение ее быстродействия, за счет снижения времени самонастройки системы.
Таким образом, предлагаемая адаптивная система управления позволяет обеспечить высокое качество управления широким классом промышленных объектов с переменными параметрами и обладает более высоким быстродействием по сравнению с прототипом за счет снижения времени самонастройки системы и улучшения сходимости процесса адаптивного ПИД-управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| Система синергетического стохастического управления технологическим процессом анаэробной очистки сточных вод | 2024 |
|
RU2835756C1 |
| СПОСОБ ПОДАВЛЕНИЯ ШУМА В ИНФОРМАЦИОННОМ СИГНАЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2206960C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАПРЯЖЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465717C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2423719C1 |
| СПОСОБ ЗАЩИТЫ ИНФОРМАЦИИ В ПРОВОДНЫХ КАНАЛАХ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152690C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
Изобретение относится к электрическим самонастраивающимся системам управления, а именно к области адаптивных систем управления с пробным гармоническим сигналом, и предназначено для управления химическими, энергетическими, электромеханическими и другими объектами с переменными или нестационарными параметрами. Технический результат заключается в повышении быстродействия за счет снижения времени самонастройки системы. Адаптивная система управления, включающая схему сравнения, первый вход которой подключен к входу адаптивной системы управления, а выход через последовательно соединенные регулятор, сумматор к входу объекта управления, блок фазовой автоподстройки частоты, выход которого подключен к входу генератора гармонических колебаний, а также через вычислительный блок к второму входу регулятора, выход генератора гармонических колебаний подключен к первым входам первого и второго фильтров Фурье, первые и вторые выходы которых подключены к соответствующим входам вычислителя АЧХ, блок вычисления стартовой частоты, первый вход которого подключен через пятый ключ к выходу объекта регулирования, а выход через третий ключ к второму входу генератора гармонических колебаний, первый вход которого объединен с вторым входом вычислительного блока, а выход через первый ключ подключен к второму входу сумматора, генератор ступенчатого сигнала, выход которого подключен к второму входу блока вычисления стартовой частоты, а также через четвертый ключ к третьему входу сумматора, первый избирательный фильтр, вход которого подключен к выходу сумматора, а выход к второму входу первого фильтра Фурье, второй избирательный фильтр, вход которого подключен к выходу объекта регулирования, а выход к второму входу второго фильтра Фурье, выход объекта регулирования подключен через второй ключ к второму входу схемы сравнения. 1 з.п. ф-лы, 5 ил.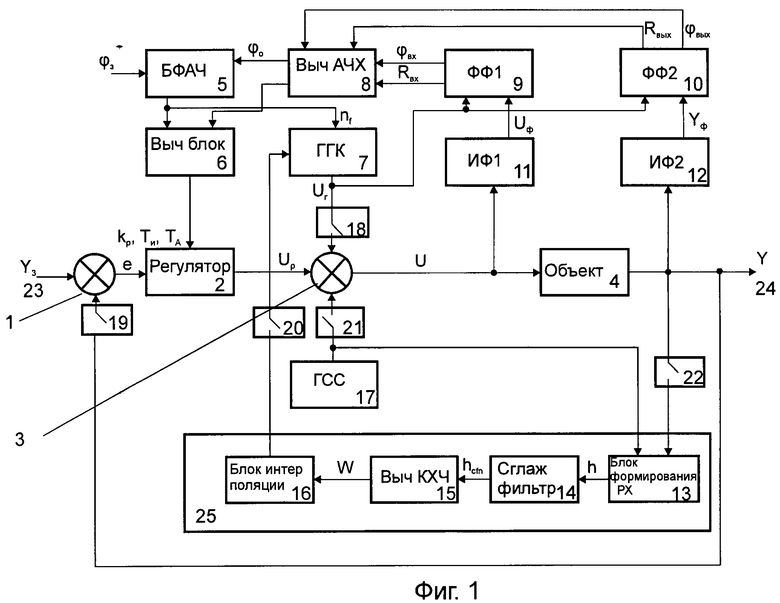
1. Адаптивная система управления, включающая схему сравнения, первый вход которой подключен к входу адаптивной системы управления, а выход через последовательно соединенные регулятор, сумматор к входу объекта управления, блок фазовой автоподстройки частоты, выход которого подключен к входу генератора гармонических колебаний, а также через вычислительный блок к второму входу регулятора, выход генератора гармонических колебаний подключен к первым входам первого и второго фильтров Фурье, первые и вторые выходы которых подключены к соответствующим входам вычислителя АЧХ, отличающаяся тем, что в нее введены блок вычисления стартовой частоты, первый вход которого подключен через пятый ключ к выходу объекта регулирования, а выход через третий ключ к второму входу генератора гармонических колебаний, первый вход которого объединен с вторым входом вычислительного блока, а выход через первый ключ подключен к второму входу сумматора, генератор ступенчатого сигнала, выход которого подключен к второму входу блока вычисления стартовой частоты, а также через четвертый ключ к третьему входу сумматора, первый избирательный фильтр, вход которого подключен к выходу сумматора, а выход к второму входу первого фильтра Фурье, второй избирательный фильтр, вход которого подключен к выходу объекта регулирования, а выход к второму входу второго фильтра Фурье, выход объекта регулирования подключен через второй ключ к второму входу схемы сравнения.
2. Адаптивная система управления по п.1, отличающаяся тем, что блок вычисления стартовой частоты содержит вычислитель разгонной характеристики, первый и второй входы которого подключены к первому и второму входам блока вычисления стартовой частоты, а выход через последовательно включенные сглаживающий фильтр, вычислитель комплексной частотной характеристики, вычислитель нормированного периода колебаний к выходу блока вычисления стартовой частоты.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМАЛЬНОЙ ИМПУЛЬСНОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2006 |
|
RU2384872C2 |
| НЕЛИНЕЙНАЯ АДАПТИВНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2004 |
|
RU2267147C1 |
| US 20030195641 A1, 16.10.2003 | |||
| US 20110022193 A1, 27.01.2011 | |||
| EP 0384437 A, 29.08.1990 | |||
| US 7383235 B1, 03.06.2008. | |||

