Изобретение относится к области автоматизированных систем управления технологическими процессами и производствами, а конкретно к устройствам управления нагревательными процессами, и может быть использовано в металлургической, машиностроительной и других отраслях промышленности.
Из существующего уровня техники известен интеллектуальный контроллер с нейронной сетью и правилами самомодификации (патент RU 2266558, кл. G06F 9/00, G05B 13/02 от 31.12.2003), содержащий управляющую нейронную сеть, объект управления, выходы которого с первого по второй соединены соответственно с первым и вторым входами управляющей нейронной сети, вход объекта управления соединен с выходом управляющей нейронной сети. В него также введены блок коэффициента эффективности, обучающая нейронная сеть, блок правил самообучения управляющей нейронной сети, блок истории работы объекта управления, причем входы блока коэффициента эффективности с первого по второй связаны соответственно с первым и вторым выходами объекта управления, первый вход обучающей нейронной сети связан с выходом блока коэффициента эффективности, выход обучающей нейронной сети соединен с первым входом блока правил самообучения управляющей нейронной сети, первый вход блока истории работы объекта управления связан с первым выходом блока правил самообучения управляющей нейронной сети, второй и третий входы связаны с первым и вторым выходами объекта управления соответственно, первый выход блока истории работы объекта управления связан со вторым входом обучающей нейронной сети и вторым входом блока правил самообучения управляющей нейронной сети, а выходы со второго по третий связаны с первым и вторым входами управляющей нейронной сети, четвертый выход блока истории работы объекта управления соединен с выходом управляющей нейронной сети. Проблемой применения интеллектуального контроллера с нейронной сетью и правилами самомодификации является отсутствие ПИД-регулятора, влекущее за собой невозможность управления объектом в момент первичного обучения нейронной сети, что сказывается на надежности работы регулятора.
Также известен адаптивный ПИД-регулятор (Pfeiffer В.-М. Towards «plug and control»: self-tuning temperature controller for PLC // International journal of Adaptive Control and Signal Processing. - 2000. - №14. - P. 519-532), принцип работы которого основан на идентификации объекта управления с помощью ступенчатых тестовых сигналов. Результаты идентификации (полученные значения параметров объекта управления в виде апериодического звена первого порядка с запаздыванием) служат основой для вычисления параметров ПИД-регулятора. Проблемами применения адаптивного ПИД-регулятора являются: 1) моменты запуска процедуры идентификации, как и амплитуды тестовых сигналов, определяются оператором технологического процесса, что требует высокой квалификации персонала, то есть система адаптации работает в полуавтоматическом режиме, 2) идентификация строится на определении точки перегиба переходной характеристики объекта управления, что на практике приводит к тому, что результаты процедуры идентификации могут существенно отличаться даже из сходных начальных условий.
Наиболее близким к заявленному техническому решению является самонастраивающийся ПИД-регулятор, который содержит ПИД-регулятор, связанный выходом с входом объекта управления и первым входом идентификатора, выход объекта управления соединен со вторым входом идентификатора, выход которого соединен со входом синтезатора, первый выход которого подключен к первому входу ПИД-регулятора, второй вход ПИД-регулятора подключен к выходу сумматора, первый вход которого соединен с выходом объекта управления, второй вход сумматора соединен с выходом генератора испытательного сигнала, отличающийся тем, что введены И-регулятор, блок управления и блок самонастройки амплитуд испытательного сигнала, генератор испытательного сигнала настроен так, чтобы периоды испытательных частот были кратны периоду дискретности, при этом выход ПИД-регулятора соединен с первым входом блока управления, выход которого соединен с входом объекта управления и первым входом идентификатора, второй вход блока управления соединен с выходом И-регулятора, вход которого подключен к выходу сумматора, с третьим входом блока управления соединен второй выход синтезатора, выход объекта управления соединен с четвертым входом блока управления и с входом блока самонастройки амплитуд испытательного сигнала, выход которого соединен со входом генератора испытательного сигнала (RU 2419122 С2, опубл. 20.05.2011).
Недостатками такого технического решения являются низкая эффективность применения частотного метода на объектах управления с большой постоянной времени Т (например, теплотехнические объекты с Т>800 с), поскольку в этом случае частоты тестовых сигналов будут столь низки, что их амплитуда окажется существенно ниже амплитуды спектра самого объекта управления на данных частотах, то есть будет невозможно оценить влияние тестового сигнала на выход объекта управления. А кроме того, необходимо постоянно идентифицировать объект управления. Результаты данной процедуры могут существенно отличаться даже из сходных начальных условий.
В свою очередь, предлагаемое решение проводит подстройку параметров ПИ-регулятора непрерывно, не требует проведения процедуры идентификации объекта управления, работоспособно для объектов с большой постоянной времени Т, не требует длительной процедуры автономного обучения нейронной сети.
Задачей, на решение которой направлено заявляемое изобретение, является обеспечение качественного переходного процесса по температуре с минимальным расходом энергоносителя и необходимой по технологии скоростью нагрева в условиях изменения параметров объекта управления ввиду его нелинейности.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является обеспечение переходного процесса, отвечающего требуемым значениям критериев качества подобных процессов, в условиях изменения значений параметров объекта управления. Таким образом, будет учтена нелинейность, присущая объекту управления, что, в свою очередь, приведет к повышению энергоэффективности работы нагревательного объекта.
Данный результат достигается за счет того, что автоматический нейросетевой настройщик параметров ПИ-регулятора для управления нагревательными объектами, работающий непрерывно в реальном масштабе времени и содержащий нейронную сеть, производящую расчет параметров ПИ-регулятора, и базу правил, регламентирующую скорость настройки отдельных нейронов нейронной сети и объединенную с указанной нейронной сетью в единый модуль управления, первый выход которого соединен с П-каналом регулятора, второй выход которого соединен с И-каналом регулятора, уставка по температуре соединена с первым входом нейросетевого настройщика, выход объекта управления соединен со вторым входом настройщика и с двумя блоками задержки сигнала, выход первого блока задержки сигнала соединен с третьим входом настройщика, выход второго блока задержки соединен с четвертым входом настройщика, выход ПИ-регулятора соединен с пятым входом настройщика.
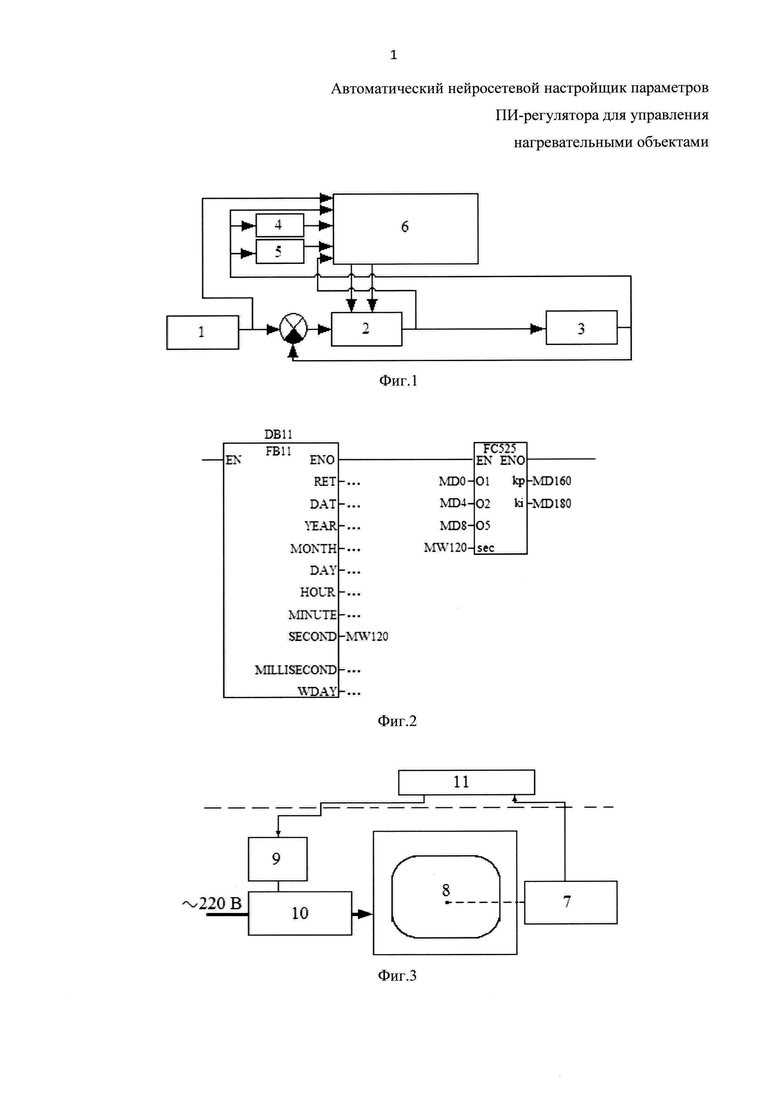
Сущность изобретения поясняется чертежами, на которых изображена: фиг. 1 - структурная схема автоматического нейросетевого настройщика параметров ПИ-регулятора для управления нагревательными объектами;
фиг. 2 - частная программная реализация настройщика в блоке ОВ1 пакета Step7; фиг. 3 - функциональная схема системы управления муфельной электропечью;
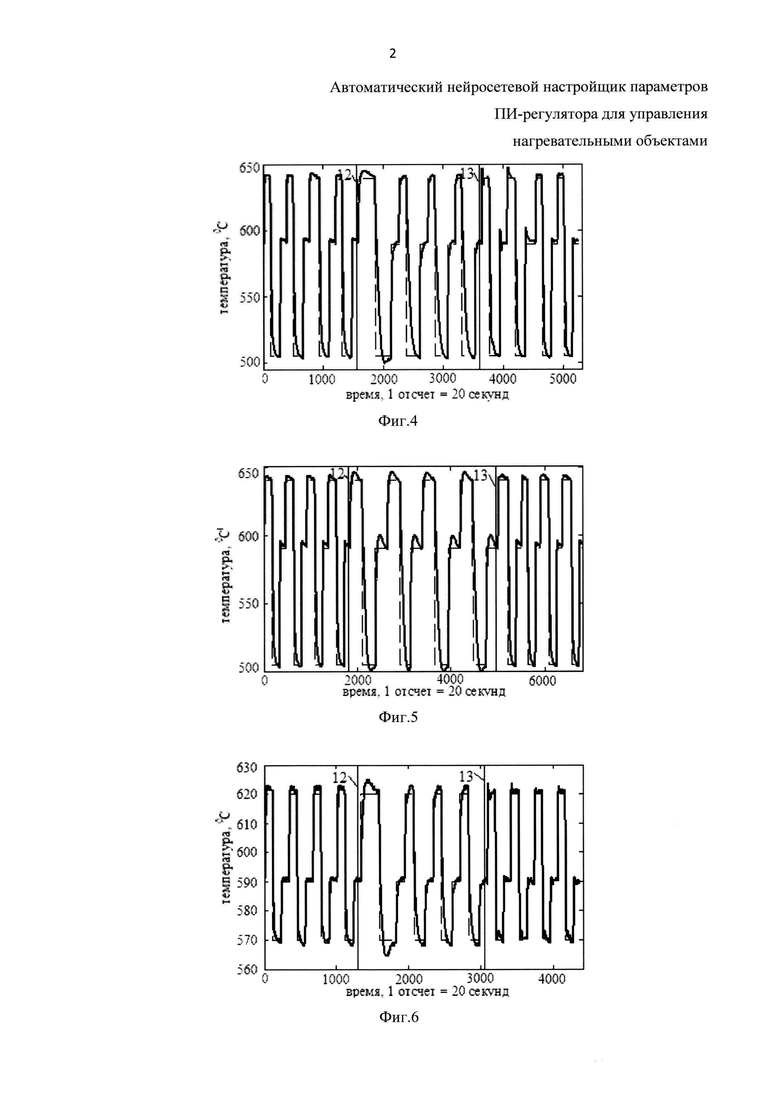
фиг. 4 - результаты экспериментов для графика смены заданий 590°C→640°C→505°C→590°C, полученные с использованием автоматического нейросетевого настройщика параметров ПИ-регулятора;
фиг. 5 - результаты экспериментов для графика смены заданий 590°C→640°C→505°C→590°C, полученные с использованием обычного ПИ-регулятора;
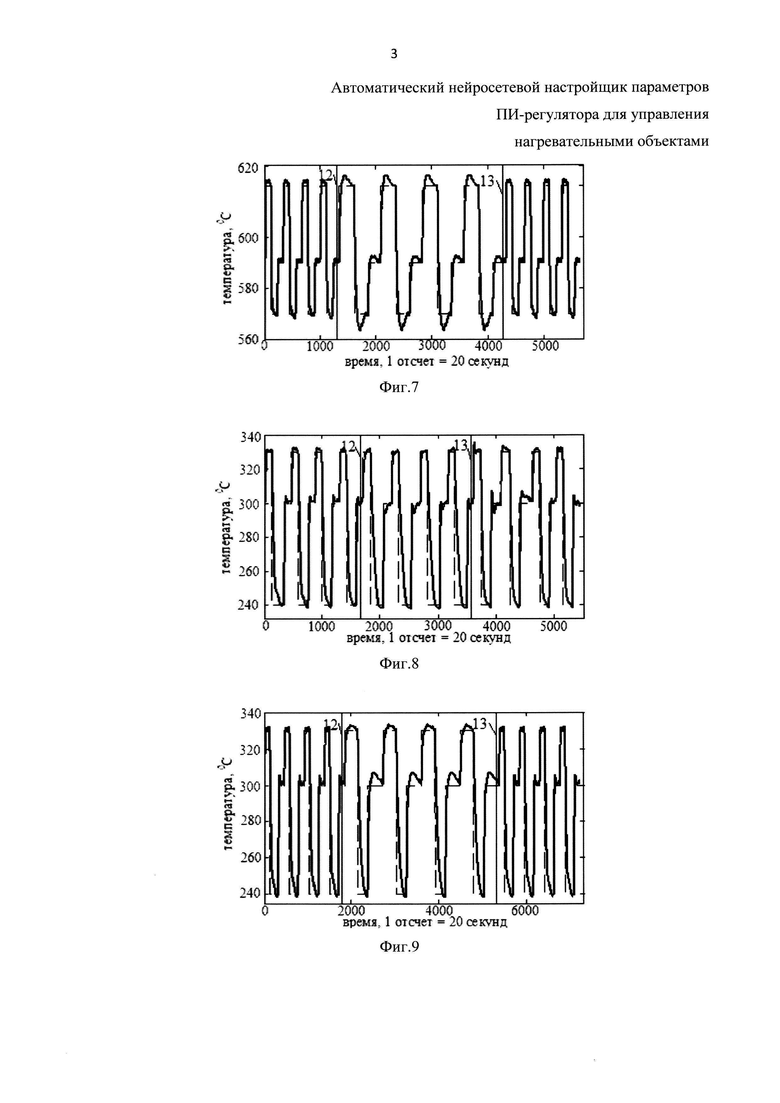
фиг. 6 - результаты экспериментов для графика смены заданий 590°C→620°C→570°C→590°C, полученные с использованием автоматического нейросетевого настройщика параметров ПИ-регулятора;
фиг. 7 - результаты экспериментов для графика смены заданий 590°C→620°C→570°C→590°C, полученные с использованием обычного ПИ-регулятора;
фиг. 8 - результаты экспериментов для графика смены заданий 300°C→330°C→240°C→300°C, полученные с использованием автоматического нейросетевого настройщика параметров ПИ-регулятора:
фиг. 9 - результаты экспериментов для графика смены заданий 300°C→330°C→240°C→300°C, полученные с использованием обычного ПИ-регулятора.
Нейронная сеть, используемая в автоматическом нейросетевом настройщике параметров ПИ-регулятора для управления нагревательными объектами, является многослойной сетью прямого распространения сигнала.
В целом, нейросетевой настройщик работает следующим образом (фиг. 1). На нейросетевой настройщик 6 поступают сигналы с уставки 1, управляющие воздействие с ПИ-регулятора 2, выход с объекта управления 3, выход с объекта управления подается на входы блоков задержки сигналов 4 и 5, выходы блоков задержки сигналов 4 и 5 подаются на нейросетевой настройщик. При выполнении одного из условий, содержащихся в базе правил, скорость обучения нейронов, ответственных за соответствующие каналы регулятора, становится ненулевой. В этом случае производится один такт оперативного обучения нейронной сети методом обратного распространения ошибки. Выходом нейронастройщика являются новые коэффициенты ПИ-регулятора 2.
Настройщик устанавливается на работающий под управлением ПИ-регулятора агрегат. Для этого необходимы сведения о текущих значениях параметров ПИ-регулятора; требуемый диапазон допустимых скоростей нагрева/остывания для текущего технологического процесса; требования к качеству переходных процессов по перерегулированию, колебательности, статической ошибке; ограничения на сигнал управления; максимальная для данной печи температура; длительность в секундах Tn самого короткого по времени из текущей картины уставок переходного процесса под управлением регулятора с текущими (до установки настройщика) параметрами, количество точек, по которым ведется усреднение выходного параметра объекта управления. Данные характеристики вносятся в настройщик один раз.
Далее настройщик запускается, рассчитывает дискретность своей работы Δt как отношение Tn к количеству нейронов в скрытом слое N. Для блока 4 фиг. 1 устанавливается время задержки Δt, для блока 5-2 Δt. Далее настройщик первые N тактов собирает сведения об объекте управления (в это время параметры регулятора сохраняются прежними и не меняются), а затем первично за один такт обучает нейронную сеть методом экстремального обучения таким образом, чтобы его выходы оказались равны текущим значениям параметров ПИ-регулятора (установка начального состояния нейронной сети). Это позволяет сохранить устойчивость объекта при пуске настройщика.
В дальнейшем настройщик работает по следующему алгоритму. Раз в Δt производится его вызов. Настройщик получает данные с датчика, установленного на объекте управления, данные о текущей уставке и сигнале управления с ПИ-регулятора. Значение выходного параметра объекта управления усредняется по выбранному числу точек. Для каждого из нейронов выходного слоя вычисляется значение рассогласования, в соответствии с которым будет проведено оперативное обучение. Для нейрона, отвечающего за значение Ku, - это значение рассогласования e между значением уставки и усредненным выходом объекта управления, для нейрона, отвечающего за Kn, - это значение скорости изменения e.
Далее все скорости обучения для всех нейронов приравниваются к нулю.
Затем производится вызов базы правил. База правил содержит правила, в условиях которых определены все ситуации, когда необходима настройка регулятора, с точки зрения требуемых значений критериев качества переходных процессов, а следствия правил содержат значения скорости обучения (различные) для каждого из двух нейронов выходного слоя нейронной сети (отвечают за вычисление параметров ПИ-регулятора Kn и Ku соответственно). При верном указании начальных параметров и расчете дискретности вызова настройщика эти правила обеспечат его устойчивое функционирование в условиях изменения параметров объекта управления, но без необходимости его идентификации и постоянной переидентификации.
Если срабатывает хотя бы одно правило, то одна из скоростей обучения нейронов выходного слоя становится отличной от нуля. Тогда скорость обучения нейронов скрытого слоя приравнивается к 10-5 и происходит вызов процедуры обучения. Иначе обучения не происходит. Далее вычисляются выходы нейронной сети, они становятся выходами настройщика и данная итерация работы настройщика завершается.
Процедура обучения нейронной сети - это выполнение одного такта оперативного ее обучения методом обратного распространения ошибки. В отличие от классической реализации данного метода в данном случае скорости обучения отдельных нейронов выходного слоя зависят от порядка реального значения формируемого данным выходным нейроном параметра ПИ-регулятора. Само значение скорости, как уже упоминалось выше, определяется базой правил.
Управление нагревательными технологическими объектами в различных отраслях промышленности ведется с помощью программируемых логических контроллеров (ПЛК) различных фирм производителей: Siemens Simatic, ОВЕН, OMRON, Mitsubishi, Rockwell Automation (Allen Bradley), Schneider Electric, Honeywell, Yokogawa, SEW Eurodrive и др. Внутри данных ПЛК программно в виде функционального блока реализован ПИ-регулятор, значения параметров которого хранятся в памяти контроллера по определенным заранее известным адресам. ПЛК принимает данные о состоянии технологического процесса, передает их на вход функционального блока ПИ-регулятора, вычисляет управляющее воздействие, которое в дальнейшем передается на объект управления. Предлагаемый автоматический нейросетевой настройщик параметров ПИ-регулятора для управления нагревательными объектами реализован в виде функционального блока, загружаемого в память ПЛК, на языке программирования Structured Text. Данный язык программирования основан на стандарте IEC 61131-3 (EN 61131) и схож с языком «Паскаль». Он поддерживается всеми упомянутыми выше марками контроллеров. Таким образом, описанная реализация предлагаемого настройщика позволяет (с небольшими изменениями) интегрировать его в большинство ПЛК различных производителей.
Программный код реализации настройщика можно условно разделить на 3 подраздела:
1) в первой части кода находятся функции расчета средних и задержанных температур, записи из памяти контроллера значений уставок и выхода ПИ-регулятора;
2) во второй части программы реализована база правил в виде формализованных условий. Результатом работы данного участка кода являются скорости обучения весовых коэффициентов и смещений нейронной сети;
3) третья часть программы представляет собой реализацию обучения нейронной сети методом обратного распространения ошибки. Здесь же происходит расчет выхода нейронной сети и запись рассчитанных коэффициентов регулятора в программный модуль ПИ-регулятора.
Для частной реализации изобретения в качестве ПЛК было выбрано семейство контроллеров фирмы Siemens Simatic S7-300/400 по причине их широкого применения в металлургии, где, в свою очередь, на многих этапах производства используются нагревательные печи. Было использовано программное обеспечение Step7+SCL, позволяющее проводить комплекс работ по созданию и обслуживанию систем автоматизации. Пакет SCL содержит в себе структурированный язык управления SCL (Structured Control Language - Structured Text), являющийся языком программирования высокого уровня для Simatic S7 и основанный на указанном выше стандарте. Язык SCL поддерживает характерную для STEP 7 блочную структуру, а также позволяет создавать 87-программы, включающие в себя фрагменты на базовых языках STL, LAD и FBD.
Для обеспечения строгой дискретности вызова настройщика было использовано системное время контроллера с использованием стандартной системной функции «SFC1». Данная функция позволяет получить системное время в формате год-месяц-неделя-день-час-минута-секунда-миллисекунда. Знание системного времени позволяет оперировать этими данными и реализовать таймер на их основе. Для этого на языке SCL был реализован функциональный блок FB11, где вызывается функция SFC1, а его выходами являются год, месяц, неделя, день, час, минута и секунды, но уже как отдельные переменные, а не единая переменная типа DATA. Дискретность вызова нейросетевого настройщика Δt предполагает использование секунд, в связи с чем выход блока FB11 «SEC» записывается в область памяти MW120 для дальнейшего использования.
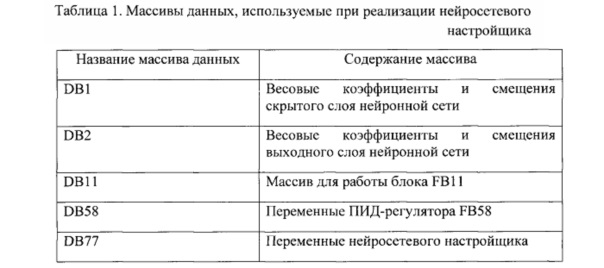
Непосредственно сам нейросетевой настройщик в соответствии с описанием изобретения реализован в виде функции FC525, написанной на языке SCL. Одной из особенностей реализации, учитывающей требования языка программирования, является хранение переменных функции не в ее теле, а в отдельных массивах данных, представленных в таблице 1. Причиной является ограничение на размер памяти, отводимой в функции под временные переменные.
Нейронная сеть имеет архитектуру входной слой, скрытый слой, выходной слой. Во входном слое расположено 5 нейронов: текущее задание по температуре; сигнал по выходу объекта управления, задержанный на 1 секунду, на Δt секунд и на 2⋅Δt секунд; задержанный на 1 секунду сигнал управления, формируемый ПИ-регулятором. В скрытом слое расположено 15 нейронов и сигмоидальная функция активации, в выходном слое - 2 нейрона и линейная функция активации.
Непосредственно ПИД-регулятор реализован фирмой Siemens и представляет собой стандартный функциональный блок FB58. Так как ПИД-регулятор должен вызываться со строгой дискретностью, блок FB58 реализован в стандартном организационном блоке ОВ35, что приводит к вызову раз в 100 мс. Значение коэффициента Д-канала приравнено к нулю.
В результате частная программная реализация настройщика в блоке ОВ1 пакета Step7 имеет вид, показанный на фиг. 2.
Здесь FB11 - блок расчета системного времени. Выходом является текущая секунда, записываемая в участок меркерной памяти MW120, FC525 - модуль нейросетевого настройщика, входами в который являются значение температуры (MD4), выход с ПИ-регулятора (MD8) и уставка по температуре (MD0). Выходом нейросетевого настройщика являются коэффициенты Kn и Ku ПИ-регулятора.
Полученная программа загружается в память контроллера. Далее он функционирует автономно.
В качестве ОУ для натурных экспериментов была выбрана муфельная электронагревательная печь типа СНОЛ-1,6.2,5.1/11-И4. Реализованная система управления муфельной электропечью, функциональная схема которой представлена на фиг. 3, состояла из двух уровней управления. На нижнем уровне находились термопара 7, измеряющая температуру рабочей зоны печи 8, и реле 9, посредством симисторов 10 включающее нагревательный элемент.
Управляющий уровень (Simatic S7-300 - 11) осуществлял непосредственное управление муфельной электропечью. Контроллер получал данные от термопары через термопреобразователь, производил их обработку и вычислял значение управляющего воздействия. В контроллере производилась широтно-импульсная модуляция управляющего воздействия и его выдача на исполнительный механизм включения нагревательного элемента.
В котроллер 11 была загружена программа, реализующая ПИ-регулятор и нейросетевой настройщик, осуществляющий вычисление его параметров Kn и Ku.
Для первого опыта график смены заданий выглядел следующим образом: 590°C→640°C→505°C→590°C и т.д. Для смены уставки температура должна удерживаться в окрестности задания, равной 5% разницы между текущим заданием и предыдущим, в течение 30 минут. Для второго опыта был использован следующий график заданий: 590°C→620°C→570°C→590°C, сохраняющий прежнюю базовую температуру, но при этом амплитуда ступенчатых смен заданий выбрана меньше. Для третьего опыта был выбран график заданий с измененной базовой температурой и амплитудой смен задания: 300°C→330°C→240°C→300°C и т.д.
Для рассматриваемой пустой печи были подобраны коэффициенты ПИ-регулятора. Для переходов 505°C→590°C и 590°C→620°C: Kn=0,6, Ku=6,976⋅10-4. Для перехода 240°C→300°C: Kn=0,37, Ku=2,66⋅10-4.
В рамках исследования были проведены три пары экспериментов (каждая пара - для одного из графиков изменения задания). Каждая пара состояла из двух одинаковых по условиям экспериментов для двух систем управления - для системы с нейросетевым настройщиком параметров ПИ-регулятора и для обычного ПИ-регулятора.
Эксперимент заключался в том, что исследовалась работа системы в следующих условиях: с начального момента и до момента, когда задание было изменено 12 раз, муфельная печь была пустой, далее в нее загружалась литая заготовка объемом примерно 30% от рабочего пространства печи, и задание изменялось еще 12 раз, а затем печь разгружалась и проводилось еще 12 переходных процессов. Каждый переходный процесс считался завершенным, если после входа в окрестность задания, равную 5% разницы между текущим заданием и предыдущим, проходило 30 минут. Затем происходила смена задания. Для этого был использован счетчик времени. Если температура в печи выходила за пределы окрестности, то счетчик времени обнулялся. Нейросетевой настройщик всегда начинал эксперимент с известными значениями коэффициентов ПИ-регулятора, указанными ранее как оптимальные для пустой печи. Обычный ПИ-регулятор всегда использовал только их.
Результаты экспериментов для графика смены заданий 590°C→640°C→505°C→590°C, полученные с использованием нейросетевого настройщика параметров ПИ-регулятора, приведены на фиг. 4, а для обычного ПИ-регулятора - на фиг. 5. На данных и последующих рисунках линии 12 и 13 обозначают моменты загрузки и разгрузки печи соответственно, сплошной график - выход ОУ, прерывистый график - задание по температуре.
До момента загрузки печи болванкой обе системы ведут себя практически одинаково. В период работы загруженной печи система с нейросетевым настройщиком позволила добиться 4% перерегулирования для процессов нагрева и 2,2% - для охлаждений, в то время как для обычного ПИ-регулятора для процессов нагрева этот показатель составил 12%, для охлаждения - 4,5%. После разгрузки печи ПИ-регулятор с первого переходного процесса начинает работать, как до загрузки печи. Системе с нейросетевым настройщиком требуется некоторое время, чтобы вернуть параметры регулятора к исходным. Затем системы начинают работать практически идентично. Общее время опыта для системы с нейросетевым настройщиком составило 29,08 часа при расходе электроэнергии 15,11 кВт⋅ч, а для обычного ПИ-регулятора - 37,7 часа при расходе электроэнергии 17,56 кВт⋅ч. Таким образом, экономия по времени на выполнение графика задания при использовании нейросетевого настройщика составила 23%, а электроэнергии - 14%.
Результаты экспериментов, полученные с использованием нейросетевого настройщика параметров ПИ-регулятора и обычного ПИ-регулятора, для графика смены заданий 590°C→620°C→570°C→590°C приведены на фиг. 6 и фиг. 7 соответственно. Перерегулирование для переходных процессов при загруженной печи для обычного ПИ-регулятора составило 11% для процессов нагрева и 12% для процессов охлаждения, для системы с нейросетевым настройщиком - 6% для нагрева и 4% - для охлаждения. Общее время опыта для системы с нейросетевым настройщиком составило 24,1 часа при расходе электроэнергии 12,9кВт*ч, а для обычного ПИ-регулятора - 31,36 часа при расходе электроэнергии 16,6 кВт*ч (экономия по времени на выполнение графика задания - 23%, по расходу электроэнергии - 22%).
Результаты экспериментов, полученные с использованием нейросетевого настройщика ПИ-регулятора и обычного ПИ-регулятора, для графика смены заданий 300°C→330°C→240°C→300°C приведены на фиг. 8 и фиг. 9 соответственно. Перерегулирование для переходных процессов нагрева в течение периода использования загруженной печи для обычного ПИ-регулятора составило 10% для нагрева и 4% для охлаждения, для системы с нейросетевым настройщиком эти показатели составили 6% для нагревов и 2,2% - для охлаждений. Общее время опыта для системы с нейросетевым настройщиком составило 30,2 часа, а расход электроэнергии - 6,46 кВт⋅ч, а для обычного ПИ-регулятора - 40,08 часа и 8,2 кВт⋅ч. Таким образом, можно сделать вывод об экономии по времени в 24% и по расходу электроэнергии в 21% на выполнение графика задания при использовании нейросетевого настройщика.
Приведенные результаты подтверждают получение технического результата при применении описанного изобретения. Показанная частная реализация не является единственно возможной. Модуль нейросетевого настройщика может быть интегрирован в контроллеры других производителей, установленные в системах управления, в которых нижний уровень управления может отличаться от показанного на фиг. 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЙРОСЕТЕВОЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ОБЖИГА ИЗВЕСТНЯКА В ПЕЧАХ ШАХТНОГО ТИПА | 2009 |
|
RU2445668C2 |
| Устройство управления одноконтурной зависимой системой отопления | 2023 |
|
RU2825177C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ ПО КУРСУ И ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2519315C2 |
| Устройство автоматического регулирования нагрузки угледобывающего комбайна | 2020 |
|
RU2747136C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПРОКАЛИВАНИЯ СЫРЬЕВОГО МАТЕРИАЛА ВО ВРАЩАЮЩЕЙСЯ ПЕЧИ | 2006 |
|
RU2308651C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СВЕТОФОРНЫМ ОБЪЕКТОМ С ЭВМ С НЕЙРОПРОГРАММАМИ | 1998 |
|
RU2151424C1 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| Способ определения источников аномалии в кибер-физической системе | 2020 |
|
RU2749252C1 |
| Нейропроцессор (NPU) | 2024 |
|
RU2825124C1 |
Автоматический нейросетевой настройщик параметров ПИ-регулятора для управления нагревательными объектами содержит уставку по температуре, ПИ-регулятор, объект управления, два блока задержки сигналов, нейросетевой настройщик, соединенные определенным образом. Обеспечивается повышение энергоэффективности работы нагревательного объекта. 9 ил. 1 табл.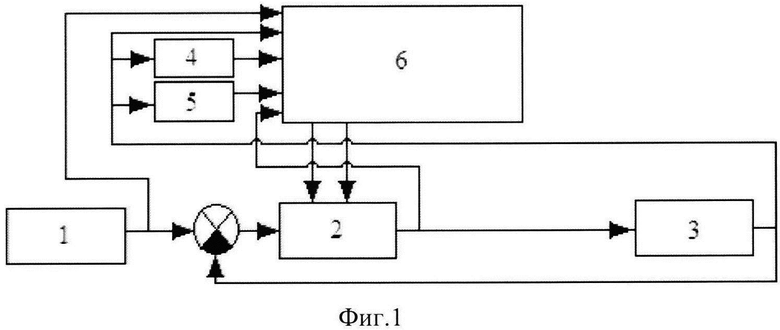
Автоматический нейросетевой настройщик параметров ПИ-регулятора для управления нагревательными объектами, работающий непрерывно в реальном масштабе времени и содержащий нейронную сеть, производящую расчет параметров ПИ-регулятора, и базу правил, регламентирующую скорость настройки отдельных нейронов нейронной сети и объединенную с указанной нейронной сетью в единый модуль управления, первый выход которого соединен с П-каналом регулятора, второй выход которого соединен с И-каналом регулятора, уставка по температуре соединена с первым входом нейросетевого настройщика, выход объекта управления соединен со вторым входом настройщика и с двумя блоками задержки сигнала, выход первого блока задержки сигнала соединен с третьим входом настройщика, выход второго блока задержки соединен с четвертым входом настройщика, выход ПИ-регулятора соединен с пятым входом настройщика.
| НЕЙРОСЕТЕВОЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ОБЖИГА ИЗВЕСТНЯКА В ПЕЧАХ ШАХТНОГО ТИПА | 2009 |
|
RU2445668C2 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ПО ПИД-ЗАКОНУ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2510956C2 |
| US 5877954 A1, 02.03.1999 | |||
| CN 104914720 A, 16.09.2015. | |||

