Область техники, к которой относится изобретение
Изобретение относится к автомобильной технике, а именно к способам помощи водителю наземных транспортных средств (далее - ТС) при обгоне на двухполосных дорогах, особенно при обгоне ТС категорий М3 и N3 по ГОСТ Р 52051, существенно ограничивающих обзор.
Уровень техники
Известна система помощи водителю при обгоне компании Volvo (https://www.volvocarsxom/by/support/manuals/v90-cross-country/2019w46/podderzhka-voditelya/ funkciya-pomoshchi-pri-obgone/funkciya-pomoshchi-pri-obgone, дата публ. - 19.03.2020 г.). Когда ТС под управлением адаптивного круиз-контроля или Pilot Assist (ассистент водителя) следует за другим ТС и водитель (указателем левого поворота в ТС с левосторонним управлением или правого поворота - в ТС с правосторонним управлением) демонстрирует намерение выполнить обгон, эта система помогает водителю, увеличивая скорость ТС относительно впереди идущего ТС до тех пор, пока ТС не совершит обгон в полосе обгона.
Недостаток способа, реализуемого данной системой, в том, что он не позволяет установить наличие встречного ТС и не помогает предотвратить столкновение с ним. Это особенно актуально для дорог с однополосным движением в каждую сторону.
Известны система помощи водителю BMW ConnectedDrive, система ночного видения, ассистент движения в полосе, система слежения за разметкой, система помощи при перестроении, система «Ассистент вождения Plus», в сочетании с полноцветным проекционным дисплеем BMW [рекламный каталог BMW1 серии, © BMW AG Мюнхен, 2016 г.]. Данные системы анализируют всю необходимую для безопасного движения дорожную ситуацию вокруг автомобиля, включая наличие и тип дорожных знаков (в частности, наличие ограничения скорости, запрета обгона), линии дорожной разметки, автоматически удерживая ТС в полосе движения, а также предотвращают столкновения с впереди идущими ТС.
Недостатком способа помощи водителю, реализуемого с помощью перечисленных систем, является то, что вся собираемая и анализируемая ими информация предназначена исключительно для использования на борту данного автомобиля водителем или системами автоматизированного управления ТС (например, системой Ассистента вождения и адаптивного круиз-контроля) и не передается на другие ТС.
Известна кооперативная система помощи при обгоне для условий плохой видимости (https://www.researchgate.net/publication/228549848_A_Cooperative _Overtaking_Assistance_System/figures?lo=l&utm_source=google&utm_medium=organic, дата публ. - 01.2009 г.), работающая следующим образом: когда система, используя информацию о кинематике ТС и форме дороги, предсказывает смену полосы движения автомобиля-робота, подсистема связи сообщает об этом событии, сопровождая эту информацию навигационными данными автомобиля-робота в интересующей области, которые приближаются к одному и тому же месту и движутся в противоположном направлении, подлежат изучению подсистемой интерпретатора дорожной сцены. Траектории обоих ТС прогнозируются в соответствии с их кинематикой и информацией о форме дороги, хранящейся на цифровой карте дорожного движения, и на ее основе предоставляется показатель риска предполагаемого маневра.
Недостатком способа, реализуемого данной системой, является невозможность его реализации при неустойчивом приеме сотового сигнала GSM.
Известна система помощи водителю компании Samsung, включающая видеокамеру, установленную за стеклом ветрового окна седельного тягача и передающая видеоизображение на LED-экраны (англ. light-emitting diode - светоизлучающие диоды), установленные на задних дверях полуприцепа https://www.xled.ru/news/svetodiodnyj-ekran-dlya-obgona (дата публикации -01.07.2016).
Способ помощи водителю, реализуемый данной системой, имеет ряд существенных недостатков. Первый: в реальных дорожных условиях экраны интенсивно загрязняются, поскольку находятся в зоне аэродинамического разрежения, в которую затягиваются частички грязи с дороги, обочины и от проезжающих ТС. Второй: при температурах ниже минус 15°С работа LED-экранов может быть нестабильной, что выражается в замедленном обновлении изображения, появлении черных полос или пикселизации на изображении. Третий: крупные LED-экраны имеют очень высокую стоимость. Четвертый: LED-экраны легко повредить при маневрировании в ограниченном пространстве (например, при подъезде к рампе). Пятый: LED-экраны для использования на воротах кузова грузового ТС должны быть оснащены системой защиты от вибраций и ударов, в противном случае они имеют крайне низкий ресурс. Шестой: восприятие водителем информации с LED-экранов может быть затруднено в связи с погодными условиями (например, интенсивными осадками).
Известен способ, информационная система и прибор для информирования водителя ТС об условиях запланированного обгона (патент ИЗ RU №2601500 от 15.09.2011). Способ заключается в том, что система определяет скорость впереди идущего ТС и сравнивает ее со скоростью управляемого водителем ТС, оценивает и/или вычисляет длительность обгона и отображает ее водителю ТС. Также заявлены информационная система и прибор для осуществления способа.
Важнейшим недостатком данных системы и способа является то, что они не анализируют наличие и скорость встречного ТС на соседней полосе.
Существенным недостатком данного способа является его эффективность лишь при обгоне «с хода», на магистралях, для каждого направления движения которых предназначено две и более полосы, либо для дорог с низкой интенсивностью движения. Это очевидно по фразе «определяют скорость впереди идущего транспортного средства и сравнивают ее со скоростью управляемого водителем транспортного средства».
В условиях, когда для движения ТС каждого направления имеется лишь одна полоса, водитель ТС, следующего сзади, на протяжении длительного времени движется со скоростью впереди идущего ТС, и анализ разницы этих скоростей системой бесполезен. В изобретении не описан способ определения приемистости двигателя и оснащенного им рассматриваемого ТС, хотя он может закладываться в систему при настройке системы при ее установке на конкретное ТС. Это также вызывает сомнения в эффективности способа.
Определение наличия и скорости встречного ТС средствами технического зрения ТС, водитель которого планирует совершить обгон, как правило, невозможно, поскольку при небольшой дистанции до впереди идущего ТС угол обзора средств технического зрения не позволяет им определить эти параметры.
Психологическим недостатком ряда способов помощи водителю при обгоне, которые рекомендуют или не рекомендуют водителю совершить этот маневр, является иллюзия перекладывания ответственности за безопасность обгона на электронные устройства. Водители, получившие «разрешение» на обгон, с высокой вероятностью примут решение начать маневр, однако системе свойственно ошибаться, например, по причине недостатка вводных данных или неблагоприятных дорожных или погодных условий. Часть описанных в источниках информации способов не учитывают динамические характеристики обгоняющего ТС, зависящие от мощности его двигателя и текущей загрузки. Кроме того, водительское мастерство и опыт каждого из водителей различаются, и при их дефиците возможны дорожно-транспортные происшествия.
Известна система помощи водителю при обгоне (патент на изобретение RU №2550566 от 04.07.2013). В способе предотвращения столкновений автомобилей оптическое излучение от транспортных средств, находящихся на попутной и встречной полосах движения, а также от впередиидущего транспортного средства принимают на обгоняемом транспортном средстве. Затем излучение преобразовывают в электрические сигналы и на основе данной информации определяют возможность безопасного обгона для обгоняющего транспортного средства, после чего сигнализируют водителю обгоняющего транспортного средства, движущегося на попутной полосе движения. В случае угрозы столкновения транспортных средств сигнализируют о запрете обгона по полосе встречного движения. Устройство для реализации способа содержит два оптико-электронных преобразователя, датчик ускорения, датчик скорости, датчик продольного уклона дороги, вычислитель, переключатель ввода информации о геометрических размерах транспортных средств, световые и звуковые сигнализаторы.
Недостатком способа, реализуемого с помощью данной системы, является тот факт, что система включает «дополнительные световые излучатели», входящие в стоп-сигналы и указатели поворотов и сигнализирующие водителю ТС, следующего сзади, о «разрешении» или «запрете» обгона. Это приводит, во-первых, к необходимости изменения Международной нормативной базы в области устройств освещения и сигнализации, во-вторых - к необходимости изучения всеми водителями значений сигналов «дополнительных световых излучателей», и, кроме того, изменению конструкций всех фонарей ТС. Обязательным при реализации данного способа является определение геометрических размеров и скоростных характеристик ТС, следующего сзади, что создает дополнительную нагрузку на вычислительные ресурсы обгоняемого ТС.
Кроме того, данный способ не позволяет водителю ТС, следующего сзади, получать информацию о дорожных знаках перед впереди идущим ТС.
Известны система и способ «See-Through System» («система видения насквозь») https://www.researchgate.net/publication/259344592_Augmented_Reality_Driving_Supported_by_Vehicular_Ad_Hoc_Networking, дата публ. - 10.2013 г., прототип], позволяющие водителю следующего сзади ТС «насквозь» видеть крупногабаритные ТС, следующие перед ним. В передаче потоковой видеоинформации участвуют системы DSRC (англ. Dedicated short-range communications - выделенная связь ближнего действия), обеспечивающие связь между ТС (V2V- vehicle-to-vehicle) и беспроводные технологии, базирующиеся на Vehicular Ad Hoc Networks (VANETs) - автомобильные самоорганизующиеся (беспроводные) сети.
Первым недостатком данных системы и способа является необходимость управления ТС в «очках дополненной реальности», что представляет для водителя неудобства и в ряде случаев небезопасно. ПДД РФ не разрешают использование такой аппаратуры при управлении ТС. Второй недостаток - необходимость передачи между ТС потоковой видеоинформации в режиме реального времени, что может сопровождаться задержками, способными приводить к неверной оценке водителем ТС, следующего сзади, оперативной обстановки перед лидирующим ТС, и, как следствие, дорожно-транспортным происшествиям. Третий недостаток - необходимость разрешения дилеммы между передачей изображения в максимальном разрешении и увеличением скорости обмена данными. При увеличении разрешения изображения существенно снижается скорость передачи данных между ТС и возникают помехи, а при снижении разрешения снижается качество видеоизображения, что может привести к неверной оценке водителем ТС, следующего сзади, актуальной обстановки перед лидирующим ТС, и, как следствие, дорожно-транспортным происшествиям. Также при снижении качества видеоизображения практически невозможна передача ТС, следующему сзади, достоверной информации о дорожных знаках перед лидирующим ТС, что в случае со знаками, запрещающими обгон, способно снижать безопасность дорожного движения.
Раскрытие сущности изобретения
Техническая задача, решаемая изобретением - повышение безопасности обгона в условиях ограниченной видимости и отсутствия сигнала GSM на двухполосных дорогах с двухсторонним движением.
Способ помощи водителю ТС при обгоне включает получение впереди идущим ТС входных данных от его средств технического зрения, обработку полученных входных данных в аналитическом модуле впереди идущего ТС в режиме реального времени, при этом способ дополнительно включает следующие действия: установление аналитическим модулем ТС, движущегося сзади, факта его движения по двухполосной дороге с двухсторонним движением, а также наличия впереди попутного ТС, движущегося с меньшей скоростью; преобразование входных данных, полученных средствами технического зрения впереди идущего ТС, включающих видеоданные, полученные видеокамерой впереди идущего ТС, данные радара и данные о текущем местоположении ближайшего встречного ТС, полученные по каналам V2X (англ. Vehicle-to-Everything- ТС, подключенное к любому объекту), в аналитическом модуле впереди идущего ТС в набор выходных данных, включающий расстояние до встречного ТС и его скорость; передачу набора выходных данных из аналитического модуля впереди идущего ТС посредством бортовых средств передачи данных в передающий модуль впереди идущего ТС; передачу набора выходных данных от впереди идущего ТС посредством беспроводного сетевого взаимодействия V2V в приемный модуль ТС, следующего сзади; передачу данных из приемного модуля ТС, следующего сзади, посредством бортовых средств передачи данных на средства отображения информации, находящиеся на панели приборов ТС, следующего сзади; отображение данных о скорости и расстоянии до встречного ТС на средствах отображения информации, находящихся на панели приборов ТС, следующего сзади.
Для повышения безопасности обгона набор выходных данных, передаваемый впереди идущим ТС на следующее сзади ТС, включает данные о протяженности действия запрета на совершение обгона, обусловленного действием распознанных дорожных знаков и разметки, или протяженности зоны разрешенного обгона.
Также в целях повышения безопасности обгона набор выходных данных, передаваемый впереди идущим ТС на следующее сзади ТС, дополнительно включает информацию о дорожных знаках, дорожной разметке и сигналах светофора, обнаруженных приемным модулем и проанализированных аналитическим модулем впереди идущего ТС.
Для повышения точности информации о координатах и скорости встречного ТС данные о расстоянии до встречного ТС, передаваемые на следующее сзади ТС, может формироваться аналитическим модулем системы с привлечением данных высокоточных ГНСС-приемников впереди идущего и встречного ТС.
Решение технической задачи - повышение безопасности обгона в условиях ограниченной видимости и отсутствия сигнала GSM на двухполосных дорогах с двухсторонним движением - достигается следующей совокупностью отличительных признаков способа:
способ включает установление аналитическим модулем ТС, движущегося сзади, факта его движения по двухполосной дороге с двухсторонним движением, а также наличия впереди попутного ТС, движущегося с меньшей скоростью; преобразование входных данных, полученных средствами технического зрения впереди идущего ТС, включающих видеоданные, полученные видеокамерой впереди идущего ТС, данные радара и данные о текущем местоположении ближайшего встречного ТС, полученные по каналам V2X, в аналитическом модуле впереди идущего ТС в набор выходных данных, включающий расстояние до встречного ТС и его скорость; передачу набора выходных данных из аналитического модуля впереди идущего ТС посредством бортовых средств передачи данных в передающий модуль впереди идущего ТС; передачу набора выходных данных от впереди идущего ТС посредством беспроводного сетевого взаимодействия V2V в приемный модуль ТС, следующего сзади; передачу данных из приемного модуля ТС, следующего сзади, посредством бортовых средств передачи данных на средства отображения информации, находящиеся на панели приборов ТС, следующего сзади; отображение данных о скорости и расстоянии до встречного ТС на средствах отображения информации, находящихся на панели приборов ТС, следующего сзади.
Для повышения безопасности обгона набор выходных данных, передаваемый впереди идущим ТС на следующее сзади ТС, включает данные о протяженности действия запрета на совершение обгона, обусловленного действием распознанных дорожных знаков и разметки, или протяженности зоны разрешенного обгона.
Также в целях повышения безопасности обгона набор выходных данных, передаваемый впереди идущим ТС на следующее сзади ТС, дополнительно включает информацию о дорожных знаках, дорожной разметке и сигналах светофора, обнаруженных приемным модулем и проанализированных аналитическим модулем впереди идущего ТС.
Для повышения точности информации о координатах и скорости встречного ТС данные о расстоянии до встречного ТС, передаваемые на следующее сзади ТС, может формироваться аналитическим модулем системы с привлечением данных высокоточных ГНСС-приемников впереди идущего и встречного ТС.
Данная совокупность отличительных признаков способа не обнаружена в процессе патентно-информационного поиска, следовательно, техническое решение соответствует критерию «новизна». Оно также не следует явно из уровня техники, следовательно, оно соответствует критерию «изобретательский уровень».
Краткое описание чертежей
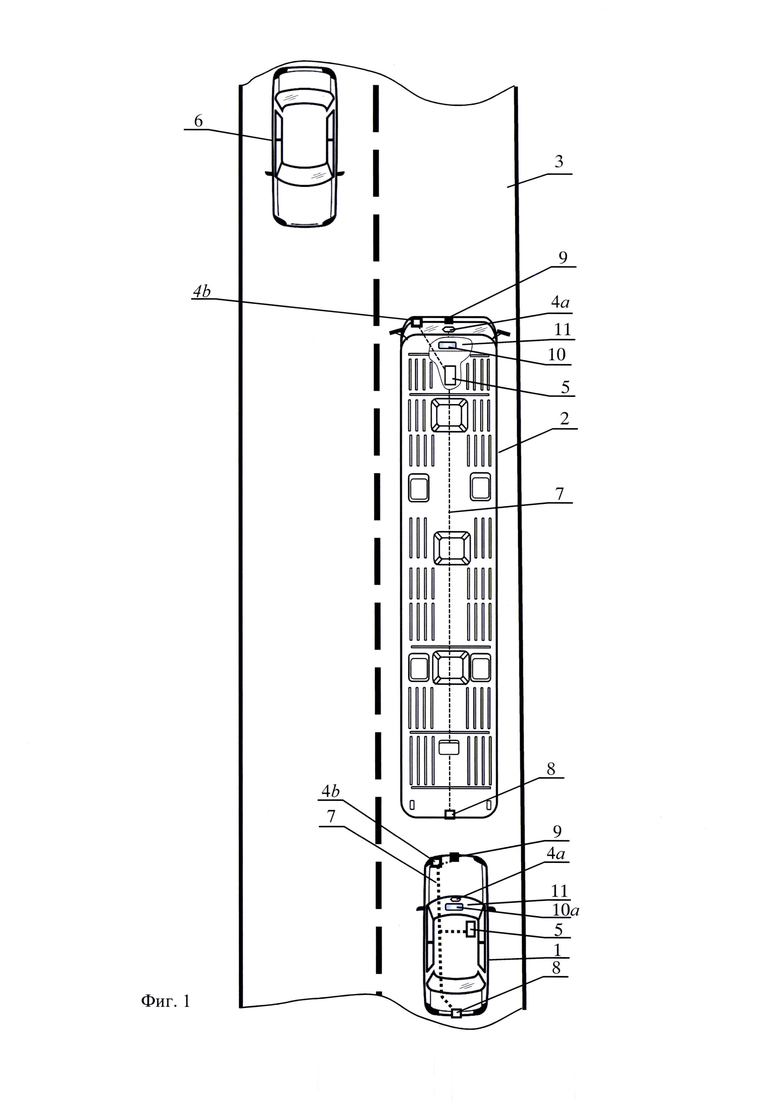
На фиг. 1 показана схема системы помощи водителю ТС при обгоне, с помощью которой реализован способ.
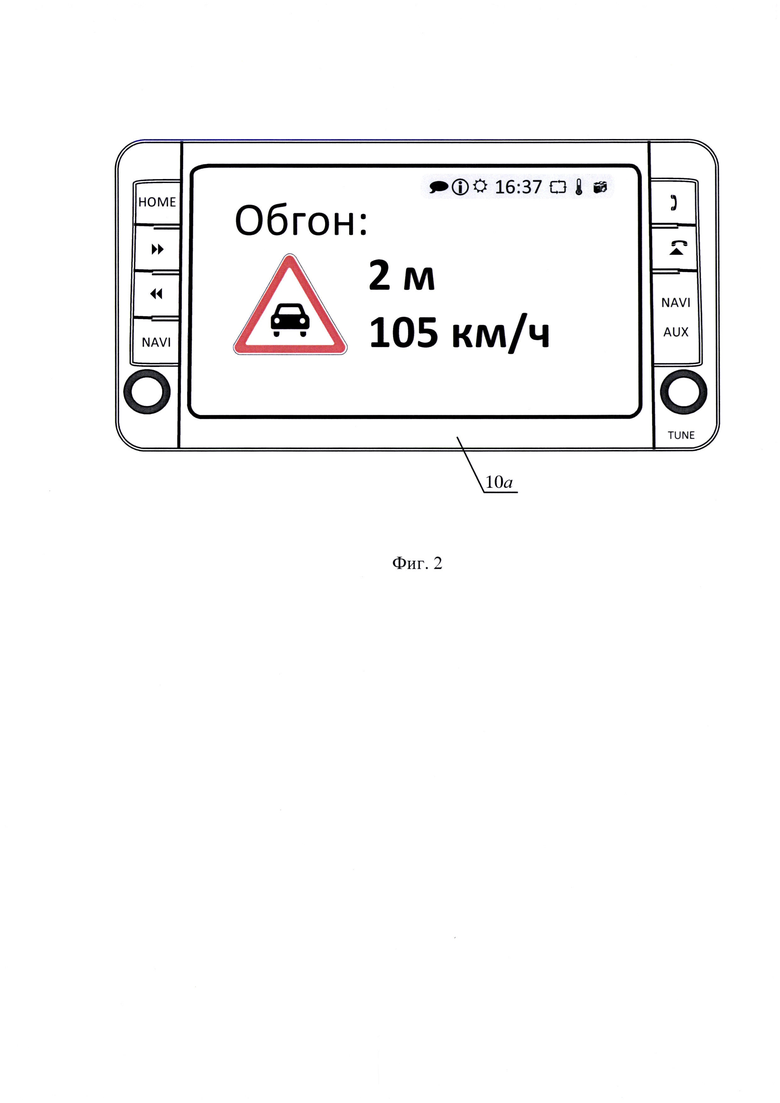
На фиг. 2 - пример предупреждения о наличии встречного ТС, расстоянии до него от ТС, следующего впереди, а также его скорости на средствах отображения информации (мониторе) ТС, следующего сзади.
Осуществление изобретения
Способ помощи водителю ТС 1, движущегося за ТС 2 по той же полосе движения 3, при обгоне на двухполосных дорогах с двухсторонним движением (фиг. 1, 2) включает:
- получение впереди идущим ТС 2, оснащенным средствами технического зрения 4, входных данных от его средств технического зрения 4;
- обработку полученных входных данных в аналитическом модуле 5 впереди идущего ТС 2 в режиме реального времени;
- установление аналитическим модулем 5 ТС 2 факта его движения по двухполосной дороге с двухсторонним движением, а также наличия впереди попутного ТС 2, движущегося с меньшей скоростью, чем ТС 1;
- преобразование входных данных, полученных средствами технического зрения 4 впереди идущего ТС 2, включающих видеоданные, полученные видеокамерой 4а впереди идущего ТС 2, данные радара 4b и данные о текущем местоположении ближайшего встречного ТС 6, полученные по каналам V2X, в аналитическом модуле 5 впереди идущего ТС 2 в набор выходных данных, включающий расстояние до встречного ТС 6 и его скорость;
- передачу набора выходных данных из аналитического модуля 5 впереди идущего ТС 2 посредством бортовых средств 7 передачи данных в передающий модуль 8 впереди идущего ТС 2;
- передачу набора выходных данных от впереди идущего ТС 2 посредством беспроводного сетевого взаимодействия V2V в приемный модуль 9 ТС 1, следующего сзади;
- передачу данных из приемного модуля 9 ТС 1, следующего сзади, посредством бортовых средств 7 передачи данных на средства 10 отображения информации в виде монитора 10а, находящегося на панели приборов 11 ТС 1, следующего сзади;
- отображение данных о скорости и расстоянии до встречного ТС 6 на средствах 10 отображения информации в виде монитора 10а, находящиеся на панели приборов 11 ТС 1, следующего сзади.
Для повышения безопасности обгона набор выходных данных, передаваемый впереди идущим ТС 2 на следующее сзади ТС 1, включает данные о протяженности действия запрета на совершение обгона, обусловленного действием распознанных дорожных знаков и разметки (не показаны), или протяженности зоны разрешенного обгона.
Также в целях повышения безопасности обгона набор выходных данных, передаваемый впереди идущим ТС 2 на следующее сзади ТС 1, дополнительно включает информацию о дорожных знаках, дорожной разметке и сигналах светофора, обнаруженных приемным модулем 9 ТС 2 и проанализированных аналитическим модулем 5 впереди идущего ТС 2.
Для повышения точности информации о координатах и скорости встречного ТС 6 данные о расстоянии до встречного ТС 6, передаваемые на следующее сзади ТС 1, формируются аналитическим модулем 5 с привлечением данных высокоточных ГНСС-приемников впереди идущего ТС 2 и встречного ТС 6.
Предложенный способ позволяет водителю ТС 1, следующего сзади, до начала обгона получить достоверную информацию о наличии или отсутствии встречного ТС 6, а также наличии перед впереди идущим ТС 2 сложного рельефа (опасных поворотов, спусков, подъемов и т.п.), перекрестков, пешеходных переходов, железнодорожного или трамвайного переезда, зоны с запрещенным обгоном, на основании предупреждающих дорожных знаков, - для того, чтобы не начинать обгон при отсутствии встречного ТС 6, но при наличии иных обстоятельств, способных снизить безопасность обгона.
В отличие от известных способов, при которых на ТС 1, следующее сзади, передается видеопоток, характеризующийся большим объемом данных, что вызывает значительные задержки, снижающие эффективность способа путем снижения надежности передачи данных и повышения нагрузки на аналитический модуль 5, в предложенном способе на ТС 1, следующее сзади, передается лишь ограниченный набор выходных данных, позволяющий с помощью штатного монитора 10а ТС 1 проинформировать его водителя о наличии и скорости встречного ТС 6 и расстоянии до него от ТС 2, а также об иных обстоятельствах, имеющих важное значение для принятия решения о начале обгона, что существенно повышает безопасность дорожного движения в одной из наиболее сложных и опасных дорожных ситуаций.
Заявленный технический результат достигается без диспетчерского центра, не зависит от погодных (к примеру, наличия, вида и интенсивности осадков), дорожных и прочих внешних условий, включая наличие и стабильность функционирования сетей GSM, а также не зависит от наличия аналогичной системы на встречном ТС 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система помощи водителю наземного транспортного средства при обгоне | 2023 |
|
RU2831762C1 |
| Устройство для информирования водителя автомобиля об условиях обгона | 2021 |
|
RU2755645C1 |
| СПОСОБ ВИЗУАЛЬНОГО ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ ВОДИТЕЛЮ БЕЗРЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2458351C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550566C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2625213C2 |
| Комплекс оповещения участников дорожного движения для предотвращения их столкновений | 2024 |
|
RU2836064C1 |
| Способ автоматизированного оповещения водителей транспортных средств на особо опасных участках дороги | 2016 |
|
RU2666103C2 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| Способ автоматизированного определения и контроля местоположения транспортного средства на дорожном полотне с двусторонним однополосным движением | 2017 |
|
RU2666087C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
Изобретение относится к способу помощи водителю наземного транспортного средства при обгоне. Способ включает: получение впереди идущим ТС входных данных от его средств технического зрения, включающих расстояние до встречного ТС и его скорость; обработку полученных данных в режиме реального времени; установление аналитическим модулем ТС, движущегося сзади, факта его движения по двухполосной дороге с двухсторонним движением, а также наличия впереди попутного ТС, движущегося с меньшей скоростью; передачу данных от впереди идущего ТС в приемный модуль ТС, следующего сзади; отображение данных о скорости и расстоянии до встречного ТС на средствах отображения информации, находящихся на панели приборов ТС, следующего сзади. Достигается повышение безопасности обгона. 3 з.п. ф-лы, 2 ил.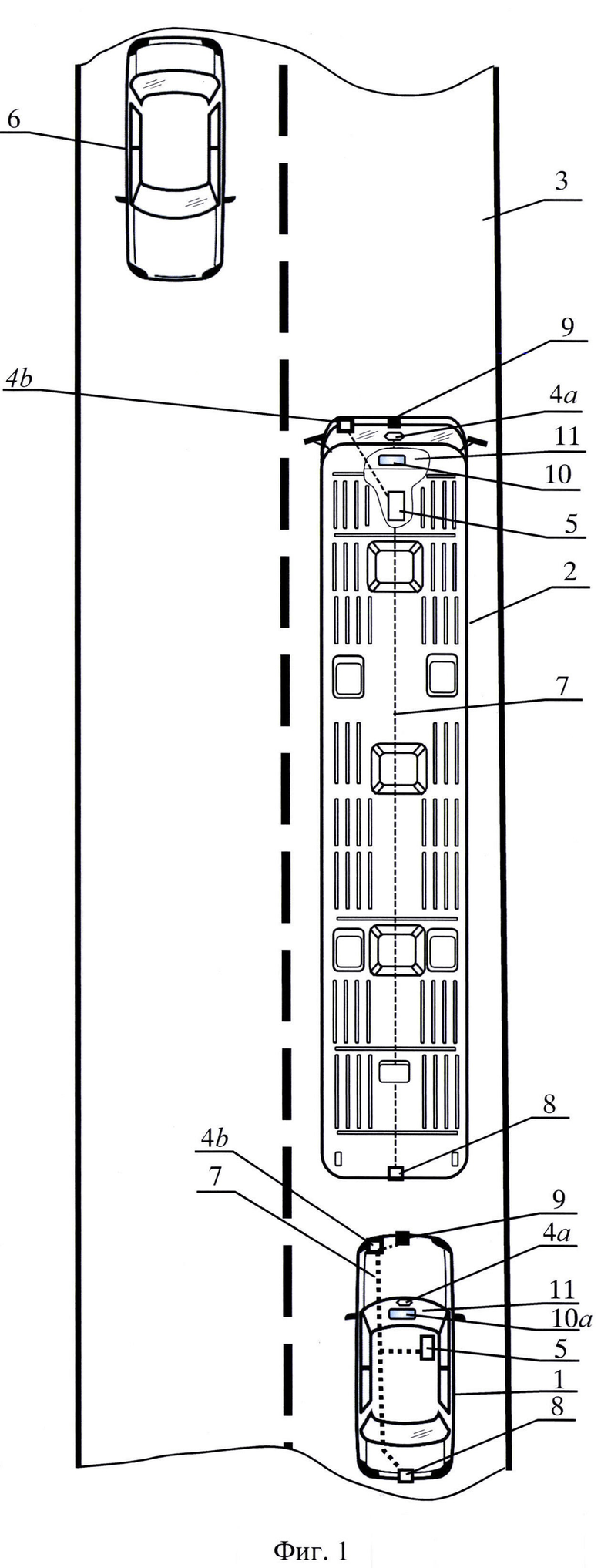
1. Способ помощи водителю наземного транспортного средства при обгоне, включающий:
- получение впереди идущим ТС, оснащенным системой технического зрения, входных данных от его средств технического зрения;
- обработку полученных входных данных в аналитическом модуле впереди идущего ТС в режиме реального времени,
отличающийся тем, что он дополнительно включает:
- установление аналитическим модулем ТС, движущегося сзади, факта его движения по двухполосной дороге с двухсторонним движением, а также наличия впереди попутного ТС, движущегося с меньшей скоростью;
- преобразование входных данных, полученных средствами технического зрения впереди идущего ТС, включающих видеоданные, полученные видеокамерой впереди идущего транспортного средства, данные радара и данные о текущем местоположении ближайшего встречного транспортного средства, полученные по каналам V2X (англ. Vehicle-to-Everything - ТС, подключенное к любому объекту), в аналитическом модуле впереди идущего ТС в набор выходных данных, включающий расстояние до встречного ТС и его скорость;
- передачу набора выходных данных из аналитического модуля впереди идущего ТС посредством бортовых средств передачи данных в передающий модуль впереди идущего ТС;
- передачу набора выходных данных от впереди идущего ТС посредством беспроводного сетевого взаимодействия V2V (V2V - vehicle-to-vehicle, непосредственная связь между ТС) в приемный модуль ТС, следующего сзади;
- передачу данных из приемного модуля ТС, следующего сзади, посредством бортовых средств передачи данных на средства отображения информации, находящиеся на панели приборов ТС, следующего сзади;
- отображение данных о скорости и расстоянии до встречного ТС на средствах отображения информации, находящихся на панели приборов ТС, следующего сзади.
2. Способ по п. 1, отличающийся тем, что набор выходных данных, передаваемый впереди идущим ТС на ТС, следующее сзади, включает данные о протяженности действия запрета на совершение обгона, обусловленного действием распознанных дорожных знаков и разметки, или протяженности зоны разрешенного обгона.
3. Способ по п. 1, отличающийся тем, что набор выходных данных, передаваемый впереди идущим ТС на ТС, следующее сзади, дополнительно включает информацию о дорожных знаках, дорожной разметке и сигналах светофора, обнаруженных приемным модулем и проанализированных аналитическим модулем впереди идущего ТС.
4. Способ по п. 1, отличающийся тем, что данные о расстоянии до встречного ТС, передаваемые на ТС, следующее сзади, формируются аналитическим модулем системы с привлечением данных высокоточных ГНСС-приемников впереди идущего и встречного ТС.
| DE 10255331 A1, 17.06.2004 | |||
| US 2017144657 A1, 25.05.2017 | |||
| US 6516273 B1, 04.02.2003 | |||
| DE 102010042115 A1, 12.04.2012 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550566C2 |

