Изобретение относится к области управления движением транспортных средств, преимущественно автотранспорта, и предназначено для принудительного обеспечения транспортной дисциплины техническими средствами в условиях насыщенных транспортных потоков, в первую очередь на магистралях с двухсторонним движением, не имеющих разделительных сооружений между полосами.
Известен «Способ и система вождения транспортного средства» (Патент №2514610 от 16.12.2010, МПК B60WF16H, патентообладатель СВ АБ (SE)). Способ заключается в том, что определяют, следует ли вести транспортное средство при низком передаточном числе согласно первому или второму режимам на основании необходимости в движущей силе. В первом режиме вождение транспортного средства осуществляется без подачи топлива на указанный двигатель. Во втором режиме двигатель обеспечивается подачей топлива для создания движущей силы для приведения транспортного средства в движение.
Данный способ и система направлены на оптимизацию подачи топлива в двигатель транспортного средства с учетом рельефа трассы и ни в коей мере не решает задачу предотвращения нарушений правил дорожного движения водителем. Здесь представляет интерес только операция автоматической коррекции ручного управления двигателем транспортного средства.
Известен «Способ повышения безопасности быстрого движения автомобиля» (Заявка на патент на изобретение PCT/KZ 2009/000014 от 07.09.2009 г., номер публикации WO 2011028083 А1 от 10.03.2011 г., МПК B60K 28/02), заключающийся в принудительном ограничении скорости автотранспортного средства до полной остановки в любой момент вождения при запаздывании реакции ответа водителя на воздействие системы, которое происходит программно или иным способом, путем воздействия на электрическую, топливную, воздушную, тормозную системы или в различной комбинации.
Данный способ направлен на провокационный контроль физического состояния водителя транспортного средства и тоже не решает задачу предотвращения неправомерных действий водителя, например, с целью получения односторонних преимуществ в условиях насыщенного транспортного движения, которые могут совершаться и при хорошем физическом состоянии водителя. Здесь предлагается другая операция автоматической коррекции ручного управления двигателем транспортного средства, приводящая к принудительной остановке транспортного средства, что не соответствует целям решаемой задачи.
Наиболее близким по технической сущности и принимаемый за прототип предлагаемого способа является «Способ и устройство следящего управления автомобиля», (Патент Германии, №4100993, МПК 5 G05D 1/02, B60K 31/00, 1991 г., ж. "Изобретения стран мира", Вып. 92 (G05) №9/92, стр. 28). Способ использует следующие операции:
- операцию измерения своими бортовыми средствами дистанции до впереди едущего транспортного средства;
- операцию измерения скорости движения автомобиля относительно впереди едущего транспортного средства бортовыми средствами автомобиля;
- операцию измерения путевой скорости автомобиля своими бортовыми средствами;
- операцию принудительного снижения путевой скорости транспортного средства посредством принудительного небольшого сокращения выходной мощности его двигателя;
- операцию принудительного увеличения путевой скорости автомобиля посредством принудительного увеличения выходной мощности его двигателя до обнуления его относительной скорости или нарушения безопасной дистанции для текущей скорости транспортного потока;
- операцию следящего управления двигателем автомобиля на основе поддержания нулевого значения относительной скорости автомобиля при отсутствии нарушений безопасной дистанции между транспортными средствами при текущей скорости транспортного потока, причем указанные операции выполняют по мере формирования условий их осуществимости.
Способ-прототип не решает задачу предотвращения запрещенных обгонов попутного транспорта, а предусмотренные в нем операции измерения относительной скорости и дистанции до впереди едущего транспорта его бортовыми средствами не обеспечивают стабильности процесса слежения из-за взаимного поперечного маневрирования транспортных средств, особенно на виражах. К тому же, полностью автоматическое управление двигателем автомобиля, задаваемое данным способом, превращает водителя в пассажира транспортного средства и затрудняет его реакцию на возникающие непредвиденные дорожные ситуации. Следовательно, данный способ-прототип не может быть использован для предотвращения неправомерных действий водителей, а именно, запрещенных обгонов и опасных сближений транспортных средств, особенно, в условиях насыщенного транспортного движения.
Известен «Способ и устройство для автоматического регулирования скорости движения и расстояния, отделяющего его от впереди идущего автомобиля» (Патент Франции №2733608, МПК 6 G05D 1/02, 1996 г., "Изобретения стран мира", Вып. 92 (G 05) №3/98, стр. 14), содержащее регулятор скорости движения автомобиля с заданной скоростью при отсутствии в зоне обнаружения впереди едущего автомобиля; регулятор интервала для поддержания задаваемой дистанции между автомобилем и впереди едущим в зоне обнаружения автомобиля; средство установления начала изменения пути движения автомобиля; регулятор уменьшения величины задаваемой дистанции при переходе автомобиля на левую полосу движения; регулятор ограничения предельной величины ускорения автомобиля при последующем переходе на правую полосу движения при отсутствии в зоне обнаружения впереди едущего автомобиля. Кроме того, автомобиль оснащен средством определения расстояния до впереди едущего автомобиля.
Это устройство-аналог не решает задачу предотвращения запрещенных обгонов попутного транспорта, а предусмотренные в нем измерения относительной скорости и дистанции до впереди едущего транспорта его бортовыми средствами не обеспечивают стабильности процесса слежения из-за взаимного поперечного маневрирования транспортных средств, особенно на виражах. К тому же, полностью автоматическое управление двигателем автомобиля, задаваемое данным способом, превращает водителя в пассажира транспортного средства и затрудняет его реакцию на возникающие непредвиденные дорожные ситуации. Следовательно, данное устройство-аналог не может быть использовано для предотвращения запрещенных обгонов и опасных сближений транспортных средств, особенно, в условиях насыщенного транспортного движения.
Наиболее близким по технической сущности к предлагаемой системе является принятая в качестве прототипа «Система обеспечения активной безопасности транспортных средств при движении в колонне» (Патент РФ №2388057, МПК G08G 1/16, опубл. 27.04 2010 г.), которая содержит антенну, модулятор, первый усилитель мощности, смеситель, преобразователь частоты, детектор, первый и второй регистраторы скорости, регистратор дальности и вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения, генератор непрерывных колебаний, второй усилитель мощности, сумматор, циркулятор и фильтр доплеровских частот, причем выход генератора непрерывных колебаний соединен с входом модулятора, первым входом смесителя и входом второго усилителя мощности, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом первого усилителя мощности, вход которого соединен с выходом модулятора, выход сумматора соединен с вторым входом циркулятора, первый вход которого соединен с антенной, а выход - со вторым входом смесителя, выход которого соединен с входами преобразователя частоты и фильтра доплеровских частот, выход которого соединен с входом второго регистратора скорости, выход которого соединен с первым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход преобразователя частоты через детектор соединен с первыми входами регистратора дальности и первого регистратора скорости, выход модулятора соединен с вторыми входами первого регистратора скорости и регистратора дальности, выход которого соединен с вторым входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, выход первого регистратора скорости соединен с третьим входом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, второй выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с входом схемы управления положением антенны, первый выход вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения связан с входом первой исполнительной схемы, выход которой соединен с источником звука, а третий - с входом второй исполнительной схемы, выход которой связан с дроссельной заслонкой, в систему дополнительно введены третья управляющая схема, соединенная с шестым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, а выход которой соединен с блоком управления антиблокировочной системы рабочей тормозной системы транспортного средства, антенна обмена данными между объектами колонны, которая через выход второго циркулятора соединена с выходом второго модулятора, а вход модулятора соединен с пятым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, сравнитель, который соединен с выходом второго циркулятора и четвертым выходом вычислителя опасного расстояния по дальности, путевой скорости и скорости сближения, четвертая исполнительная схема, связанная с выходом сравнителя, а выход четвертой исполнительной схемы связан со вновь введенной световой сигнализацией.
Это устройство-прототип не решает задачу предотвращения запрещенных обгонов попутного транспорта, а предусмотренные в нем измерения относительной скорости и дистанции до впереди едущего транспорта его бортовыми средствами не обеспечивают стабильности процесса слежения из-за взаимного поперечного маневрирования транспортных средств, особенно на виражах. К тому же, полностью автоматическое управление двигателем автомобиля, задаваемое данным способом, превращает водителя в пассажира транспортного средства и затрудняет его реакцию на возникающие непредвиденные дорожные ситуации. Следовательно, данное устройство-прототип практически не может быть использовано для предотвращения запрещенных обгонов и опасных сближений транспортных средств, особенно, в условиях насыщенного транспортного движения.
Принципиальным недостатком описанных способов и устройств является то, что их работа основывается на коллективном соблюдении транспортной дисциплины, что на практике в условиях насыщенного транспортного движения часто нарушается. В частности, в автопробках массовым образом нарушается безопасная дистанция между автомобилями и, как правило, находятся неадекватные водители, совершающие запрещенные обгоны по встречной полосе с созданием опасных аварийных ситуаций.
Задачей, на которую направлено заявляемое изобретение, является создание способа и устройства для пресечения нарушений дорожной дисциплины техническими средствами.
Техническим результатом изобретения является повышение безопасности дорожного движения на двунаправленных трассах без разделительных сооружений между транспортными потоками.
Технический результат достигается тем, что в способе предотвращения неправомерных действий водителя транспортного средства на двунаправленной трассе без разделительных сооружений между встречными транспортными потоками заключающемся в использовании операции принудительного снижения путевой скорости транспортного средства посредством небольшого уменьшения выходной мощности его двигателя, предварительно размещают на дорожном полотне магнитную полосу, разделяющую встречные транспортные потоки, первую и вторую поперечные магнитные маркерные линии на концах участков трассы с запретом обгонов по встречной полосе, и дополнительно используют:
- операцию контроля безопасности дистанции до впереди едущего транспортного средства для текущей скорости транспортного потока на основе регистрации зонированных полей излучений, создаваемых позади себя впереди едущим транспортным средством;
- операцию контроля выхода транспортного средства на встречную полосу на основе анализа истории сигналов обнаружения постоянного магнитного поля в области его днища, создаваемых магнитной полосой;
- операцию контроля нахождения транспортного средства на участке трассы с запретом обгонов по встречной полосе на основе анализа истории сигналов обнаружения постоянного магнитного поля в области его днища, создаваемых поперечными маркерными полосами на концах такого участка трассы;
- операцию контроля наличия минимальной ненулевой скорости транспортного средства;
- операцию контроля возможности поперечных маневров транспортного средства на основе анализа сигналов соответствующих средств обнаружения объектов слева и справа;
- операцию принудительного ограничения скорости транспортного средства до минимального ненулевого значения посредством принудительного ограничения выходной мощности его двигателя,
причем все перечисленные контрольные операции выполняют постоянно и одновременно, а исполнительные операции выполняют по мере формирования условий их осуществимости;
область зонированных полей излучений создают посредством излучения позади транспортного средства в одном направлении вдоль трассы нескольких полей различной протяженности и различными параметрами излучения, например, частотой, причем протяженность каждого такого поля соответствует безопасной дистанции между транспортными средствами при определенной скорости транспортного потока, а вместе указанные поля излучения покрывают весь реально возможный диапазон скоростей транспортного потока;
снижение выходной мощности двигателя транспортного средства выполняют посредством сокращения подачи топлива в двигатель транспортного средства с одновременным включением антиблокировочной системы торможения, световой и звуковой сигнализации;
магнитная полоса разделяющая встречные транспортные потоки сформирована, например, посредством использования грунтовой магнитной краски под обычную дорожную краску при разметке сплошной разделительной полосы на участке трассы с запретом обгонов по встречной полосе;
первая и вторая поперечные магнитные маркерные линии на концах участков трассы с запретом обгонов по встречной полосе удваиваются на дорожном полотне по ходу транспортного потока и формируются также, как и магнитная полоса разделяющая встречные транспортные потоки.
Технический результат достигается также тем, что, в систему для осуществления способа, содержащую на борту транспортного средства цифровой регистратор путевой скорости, своим семиразрядным выходом подключенный к одноименным линиям первого семиразрядного входа блока управления, выход которого связан со входами первой, второй, третьей и четвертой исполнительных схем, соответственно, световой сигнализации, звуковой сигнализации, управления дроссельной заслонкой подачи топлива в двигатель транспортного средства и управления его антиблокировочной системой торможения на борту транспортного средства дополнительно размещены левая и правая линейки по семь детекторов излучения, левый, средний и правый детекторы постоянного магнитного поля, детекторы присутствия объектов слева и справа, линейка семи излучателей зонированных полей излучений, причем левая и правая линейки по семь детекторов излучений, расположены во фронтальной части транспортного средства, левый, средний и правый детекторы постоянного магнитного поля, расположены на днище транспортного средства, детекторы присутствия объектов слева и справа размещены по бортам транспортного средства, линейка семи излучателей зонированных полей излучений расположена в задней части транспортного средства, семиразрядный выход левой линейки детекторов полей излучений связан одноименными линиями со вторым семиразрядным входом блока управления, семиразрядный выход правой линейки детекторов полей излучений связан одноименными линиями с третьим семиразрядным входом блока управления, выходы левого, среднего и правого детекторов магнитного поля связаны, соответственно, с четвертым, пятым и шестым входами блока управления, выходы детекторов присутствия объектов слева и справа связаны, соответственно, с седьмым и восьмым входами блока управления.
Причем, блок управления содержит блок обработки ситуаций сближения, блок обработки ситуаций обгона и первый логический элемент ИЛИ, причем первый, второй, третий семиразрядные входы блока обработки ситуаций сближения представляют, соответственно, второй, третий и первый входы блока управления, четвертый, пятый и шестой входы блока обработки ситуаций сближения представляют, соответственно, четвертый, седьмой и восьмой входы блока управления, первый, второй и третий входы блока обработки ситуаций обгона представляют, соответственно, четвертый, пятый и шестой входы блока управления, четвертый семиразрядный вход блока обработки ситуаций обгона совпадает с третьим семиразрядным входом блока управления, выход блока обработки ситуаций сближения связан с первым входом первого логического элемента ИЛИ, второй вход которого подключен к выходу блока обработки ситуаций обгона, а выход первого логического элемента ИЛИ является выхом блока управления.
Блок обработки ситуаций обгона содержит второй, третий, четвертый логические элементы ИЛИ, первый, второй, третий и четвертый логические элементы И, двухразрядную пересчетную схему, дешифратор, первый и второй ждущие мультивибраторы, S-триггер, причем первые входы второго и третьего логических элементов ИЛИ представляют, соответственно, первый и второй входы блока обработки ситуаций обгона, первый, второй и третий входы первого логического элемента И совпадают, соответственно, с первым, вторым и третьим входами блока обработки ситуаций обгона, выход первого логического элемента И связан с первым (счетным) входом двухразрядной пересчетной схемы, параллельный выход которой связан со входом дешифратора, первый выход которого, соответствующий состоянию 00 пересчетной схемы, соединен со вторым входом второго логического элемента ИЛИ, второй выход дешифратора, соответствующий состоянию 01 пересчетной схемы, связан с входом первого ждущего мультивибратора и первым входом четвертого логического элемента И, третий выход дешифратора, соответствующий состоянию 10 пересчетной схемы, связан с первым входом третьего логического элемента И, четвертый выход дешифратора, соответствующий состоянию 11 пересчетной схемы, соединен с входом второго ждущего мультивибратора, выход которого связан со вторым входом (сброс) пересчетной схемы, первый (прямой) и второй (инверсный) выходы первого ждущего мультивибратора связаны соответственно со вторыми входами третьего и четвертого логических элементов И, выход третьего логического элемента И связан с третьим входом второго логического элемента ИЛИ, выход четвертого логического элемента И связан со вторым входом третьего логического элемента ИЛИ, выходы второго и третьего логических элементов ИЛИ связаны, соответственно, со вторым (R) и первым (S) входами S-триггера, (прямой) выход которого соединен с первым входом второго логического элемента И, второй вход которого связан с выходом четвертого логического элемента ИЛИ, семиразрядный вход которого представляет четвертый семиразрядный вход блока обработки ситуаций обгона, а выход второго логического элемента И представляет выход блока обработки ситуаций обгона.
Блок обработки ситуаций сближения содержит первый, второй, третий, четвертый, пятый логические элементы ИЛИ-НЕ, логический элемент НЕ, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый, девятнадцатый, двадцатый, двадцать первый и двадцать второй логические элементы И, а также пятый, шестой и седьмой логические элементы ИЛИ, причем первые входы пятого и шестого логических элементов И представляют линию 1-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линии 2-7-разрядов которого связаны с шестиразрядным входом первого логического элемента ИЛИ-НЕ, выход которого связан со вторыми входами пятого и шестого логических элементов И, первые входы седьмого и восьмого логических элементов И представляют линию 2-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линии 3-7-разрядов которого связаны с пятиразрядным входом второго логического элемента ИЛИ-НЕ, выход которого связан со вторыми входами седьмого и восьмого логических элементов И, первые входы девятого и десятого логических элементов И представляют линию 3-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линии 4-7-разрядов которого связаны с четырехразрядным входом третьего логического элемента ИЛИ-НЕ, выход которого связан со вторыми входами девятого и десятого логических элементов И, первые входы одиннадцатого и двенадцатого логических элементов И представляют линию 4-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линии 5-7-разрядов которого связаны с трехразрядным входом четвертого логического элемента ИЛИ-НЕ, выход которого связан со вторыми входами одиннадцатого и двенадцатого логических элементов И, первые входы тринадцатого и четырнадцатого логических элементов И представляют линию 5-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линии 6-7-разрядов которого связаны с двухразрядным входом пятого логического элемента ИЛИ-НЕ, выход которого связан со вторыми входами тринадцатого и четырнадцатого логических элементов И, первые входы пятнадцатого и шестнадцатого логических элементов И представляют линию 6-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линия 7-го разряда которого связаны с входом логического элемента НЕ и первыми входами семнадцатого и восемнадцатого логических элементов И, третьи входы пятого, седьмого, девятого, одиннадцатого, тринадцатого и пятнадцатого логических элементов И представляют, соответственно, линии 1-го, 2-го, 3-го, 4-го, 5-го и 6-го разрядов первого семиразрядного входа блока обработки ситуаций сближения, линия 7-го разряда которого представляется вторым входом семнадцатого логического элемента И, третьи входы шестого, восьмого, десятого, двенадцатого, четырнадцатого и шестнадцатого логических элементов И представляют, соответственно, линии 1-го, 2-го, 3-го, 4-го, 5-го и 6-го разрядов второго семиразрядного входа блока обработки ситуаций сближения, линия 7-го разряда которого представляется вторым входом восемнадцатого логического элемента И, выходы пятого, седьмого, девятого, одиннадцатого, тринадцатого, пятнадцатого и семнадцатого логических элементов И связаны с семиразрядным входом пятого логического элемента ИЛИ, выходы шестого, восьмого, десятого, двенадцатого, четырнадцатого, шестнадцатого и восемнадцатого логических элементов И связаны с семиразрядным входом шестого логического элемента ИЛИ, выход пятого логического элемента ИЛИ связан с первыми входами девятнадцатого и двадцатого логических элементов И, выход шестого логического элемента ИЛИ соединен со вторыми входами девятнадцатого, двадцатого и двадцать второго логических элементов И, первый вход двадцатого элемента И представляет пятый вход блока обработки ситуаций сближений, второй вход двадцать первого логического элемента И представляет шестой вход блока обработки ситуаций сближения, первый вход двадцать второго логического элемента И представляет четвертый вход блок обработки ситуаций сближения, выходы девятнадцатого, двадцатого, двадцать первого и двадцать второго логических элементов И соединены, соответственно, с первым, вторым, третьим и четвертым входами седьмого логического элемента ИЛИ, выход которого представляет выход блока обработки ситуаций сближения.
Создание зонированных полей излучений позади транспортного средства инициируется линейкой из семи излучателей, отличающихся друг от друга параметрами генерации, например, несущей частотой колебаний и мощностью.
Заявляемая система содержит две идентичные (левую и правую) линейки детекторов полей излучений, с помощью которых регистрируется факт и определяется характер сближения попутных транспортных средств. В каждой из указанных линеек сигналы зонированных полей излучений воспринимаются семью направленными детекторами излучений, конструктивно согласованными с параметрами соответствующих полей излучений.
В совокупности указанные отличия обеспечивают получение заявленного технического результата.
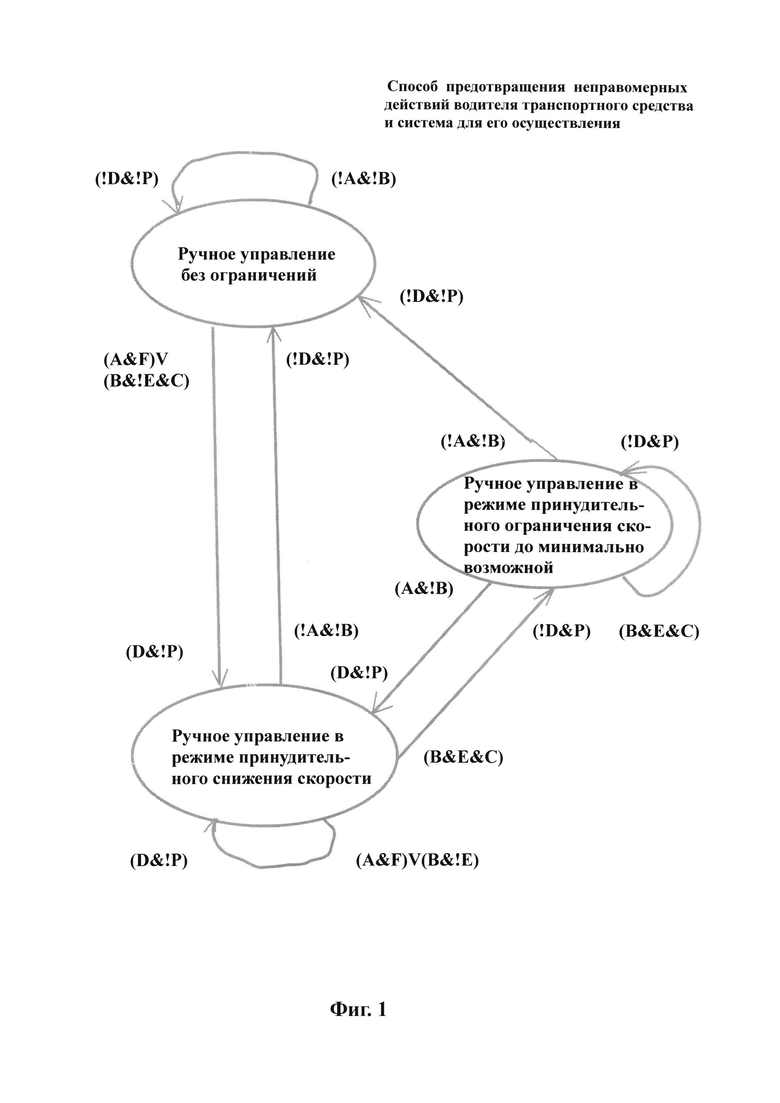
Порядок выполнения операций в заявляемом «Способе предотвращения неправомерных действий водителя транспортного средства» поясняется диаграммой переходов (фиг. 1), в которой в качестве устойчивых состояний рассматриваются три режима ручного управления транспортным средством: ручное управление без ограничений; ручное управление в режиме принудительного снижения скорости; ручное управление в режиме принудительного ограничения скорости до минимально ненулевой. Результаты выполнения контрольных операций заявляемого способа, играют роль сигналов, инициирующих переходы в рассматриваемой диаграмме, а исполнительные операции заявляемого способа трактуются в качестве выходных сигналов ее переходов. На фиг. 1 использованы следующие обозначения:
А - результат выполнения операции контроля безопасности дистанции до впереди едущего транспорта в случае ее нарушения;
!А - результат выполнения операции контроля безопасности дистанции до впереди едущего транспорта в случае отсутствия ее нарушения;
В - результат выполнения операции контроля выхода транспортного средства на встречную полосу в случае его осуществления;
!В - результат выполнения операции контроля выхода транспортного средства на встречную полосу в случае его отсутствия;
С - результат выполнения операции контроля нахождения транспортного средства на участке трассы с запретом обгонов по встречной полосе при наличия такового;
!С - результат выполнения операции контроля нахождения транспортного средства на участке трассы с запретом обгонов по встречной полосе при отсутствии такового;
Е - результат выполнения операции контроля ограничения скорости транспортного средства до минимума ненулевой скорости при его соблюдении;
!Е - результат выполнения операции контроля ограничения скорости транспортного средства до минимума ненулевой скорости при его нарушении;
F - результат выполнения операции контроля блокирования возможности поперечного маневра транспортного средства при наличии такой ситуации;
!F - результат выполнения операции контроля блокирования возможности поперечного маневра транспортного средства при отсутствии блокировки;
D - результат выполнения операции принудительного снижения путевой скорости транспортного средства посредством небольшого уменьшения выходной мощности его двигателя;
!D - результат блокирования операции принудительного снижения путевой скорости транспортного средства посредством небольшого уменьшения выходной мощности его двигателя;
Р - результат выполнения операции принудительного ограничения скорости транспортного средства до минимального ненулевого значения;
!Р - результат блокирования операции принудительного ограничения скорости транспортного средства до минимального ненулевого значения;
При движении транспортного средства без опасных сближений с впереди едущим транспортом и без выхода транспортного средства на встречную полосу, что соответствует истинному значению логического выражения (!А&!В), реализуют ручное управление транспортом без ограничений, что соответствует истинному значению логического выражения (!D&!P). При продолжении движения транспортного средства с сохранением указанных условий сохраняется и режим его управления. На диаграмме переходов это соответствует переходу из состояния ручного управления без ограничений под воздействием входного сигнала (!А&!В) в то же самое состояние с выдачей сигнала (!D&!P). В случае возникновения опасного сближения транспортного средства с впереди едущим транспортом при отсутствии возможности поперечного маневра, что соответствует истинному значению логического выражения (A&F), или выхода транспортного средства на встречную полосу на участке трассы с запретом обгонов по встречной полосе на скорости, большей минимальной ненулевой скорости, что соответствует истинному значению логического выражения (B&C&!E), выполняют переход к ручному управлению в режиме принудительного снижения скорости за счет небольшого сокращения подачи топлива в двигатель, что соответствует истинному значению логического выражения (D&!P). Такое состояние ручного управления транспортным средством с постепенным принудительным снижением его скорости будет поддерживаться некоторое время, что на диаграмме переходов иллюстрируется переходом из рассматриваемого состояния в него же с входным сигналом (A&F)v(D&C&!E) и выходным сигналом (D&!P). Выход из последнего состояния при первичном нарушении безопасной дистанции между транспортными средствами состоится лишь при восстановлении таковой, что соответствует истинному значению логической формулы (!А&!В), и, в этом случае осуществляют переход к ручному управлению без ограничений, что соответствует выходному сигналу (!D&!P) на данном переходе. Если же первичной причиной ручного управления транспортным средством в режиме принудительного снижения скорости был его выход на встречную полосу, то выход из указанного режима управления транспортным средством осуществляют только после достижения транспортным средством минимальной ненулевой скорости, что соответствует истинному значению логического выражения (В&Е&С) и переходят к режиму ручного управления транспортным средством с принудительным ограничением его скорости до минимальной ненулевой скорости с выходным сигналом (!D&P), оставляя возможность водителю вывести транспортное средство на разрешенную полосу движения. Поскольку это занимает определенное время, то последнее состояние подтверждается переходом из него в него же по входному сигналу (В&Е&С) с выходным сигналом (!D&P). От последнего режима управления транспортным средством переходят к режиму управления без ограничений только после возврата транспортного средства на разрешенную полосу при отсутствии нарушения безопасной дистанции до впереди едущего транспорта. Этот переход проходит по входному сигналу (!А&!В) с формированием выходного сигнала (D&!P). Если же после возврата транспортного средства на разрешенную полосу оказывается нарушенной безопасность дистанции до впереди едущего транспорта, что соответствует истинному значению логического выражения (А&!В), то происходит переход к ручному управлению транспортным средством в режиме принудительного снижения скорости вплоть до нулевой, что соответствует выходному сигналу (D&!P).
Операции с результатами А и !А выполняют с учетом характера взаимодействия транспортного средства с зонированными полями излучений от впереди едущего транспорта, а операции с результатами В,!В,С и !С - с учетом характера его взаимодействия с магнитными разделительной и поперечными маркерными полосами.
В предлагаемом способе используют новые операции: - операцию контроля безопасности дистанции до впереди едущего транспортного средства, - операцию контроля выхода транспортного средства на встречную полосу, - операцию контроля нахождения транспортного средства на участке трассы с запретом обгонов по встречной полосе, - операцию контроля наличия минимальной ненулевой скорости транспортного средства, операцию контроля возможности поперечных маневров транспортного средства, - операцию принудительного ограничения скорости транспортного средства до минимального ненулевого значения. Отличием является также использование зонированных полей излучений для определения нарушений безопасной дистанции между транспортными средствами, а также уменьшение выходной мощности двигателя транспортного средства посредством сокращения подачи топлива с одновременным включением звуковой и световой сигнализации, и антиблокировачной системы торможения.
Использование зонированных полей излучений позволяет определять нарушение безопасной дистанции между транспортными средствами, а также уменьшить выходную мощность двигателя транспортного средства посредством сокращения подачи топлива с одновременным включением звуковой и световой сигнализации, и антиблокировачной системы торможения.
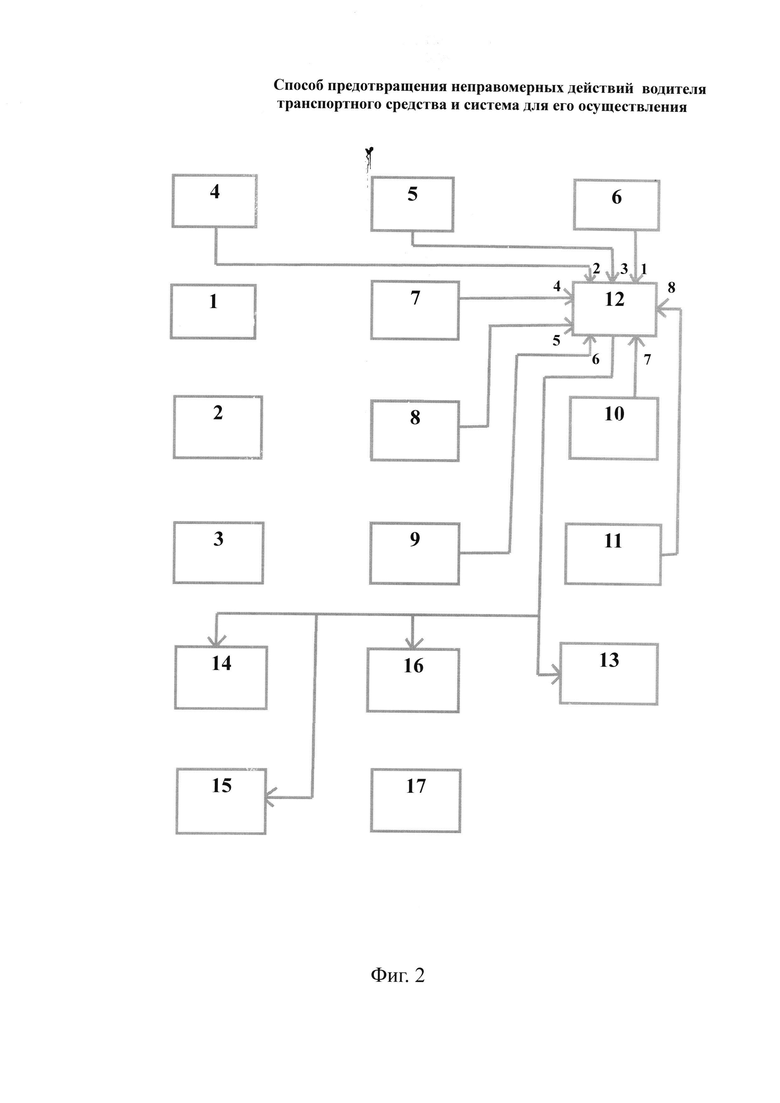
На фиг. 2 представлена функциональная схема системы для осуществления заявляемого способа.
На фиг. 3 представлена функциональная схема блока управления системы.
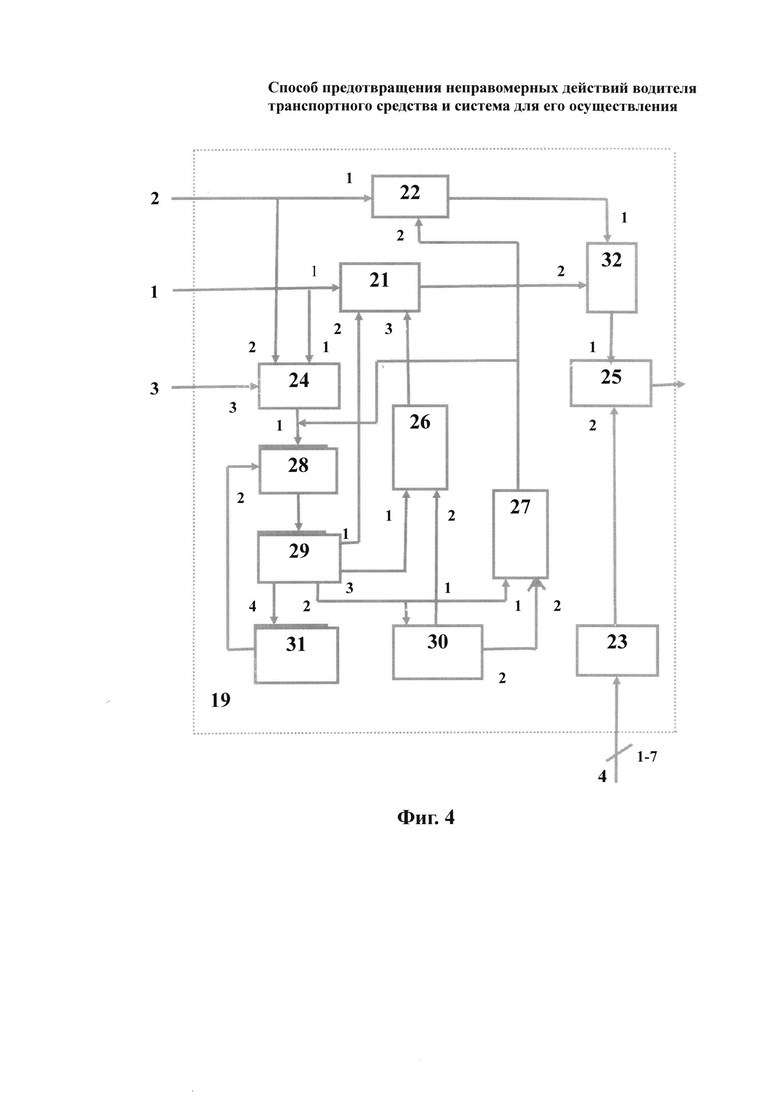
На фиг. 4 представлена функциональная схема блока обработки ситуаций обгона.
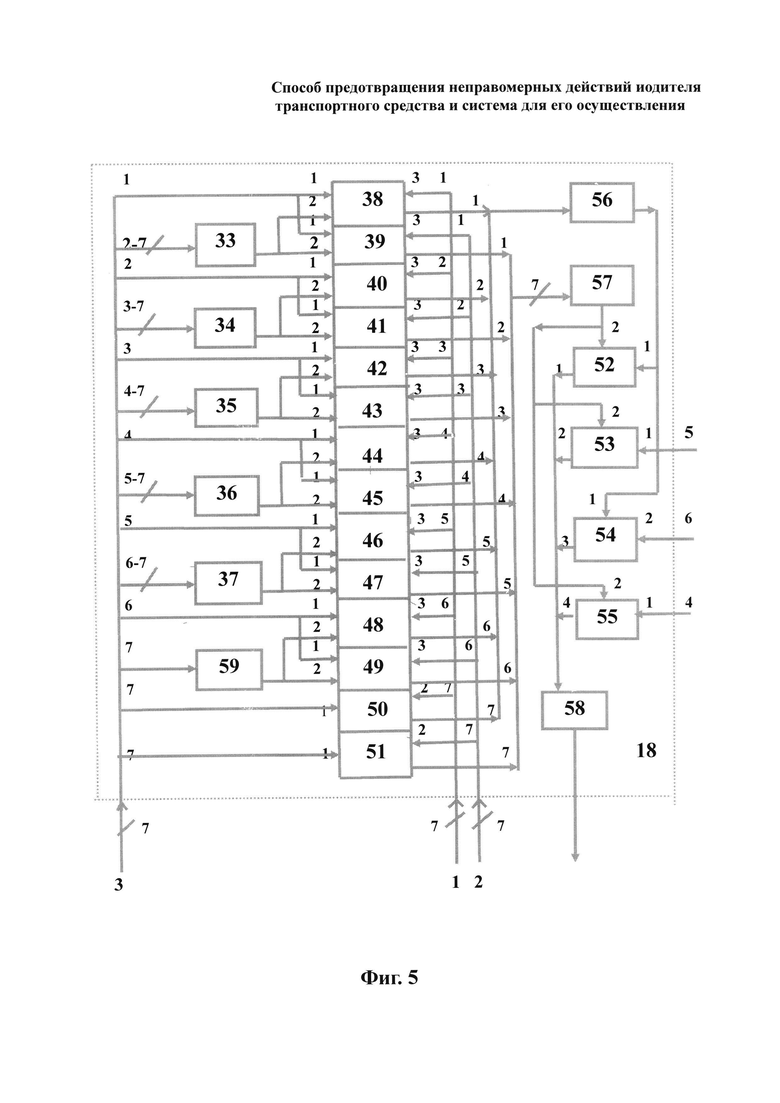
На фиг. 5 представлена функциональная схема блока обработки ситуаций сближения.
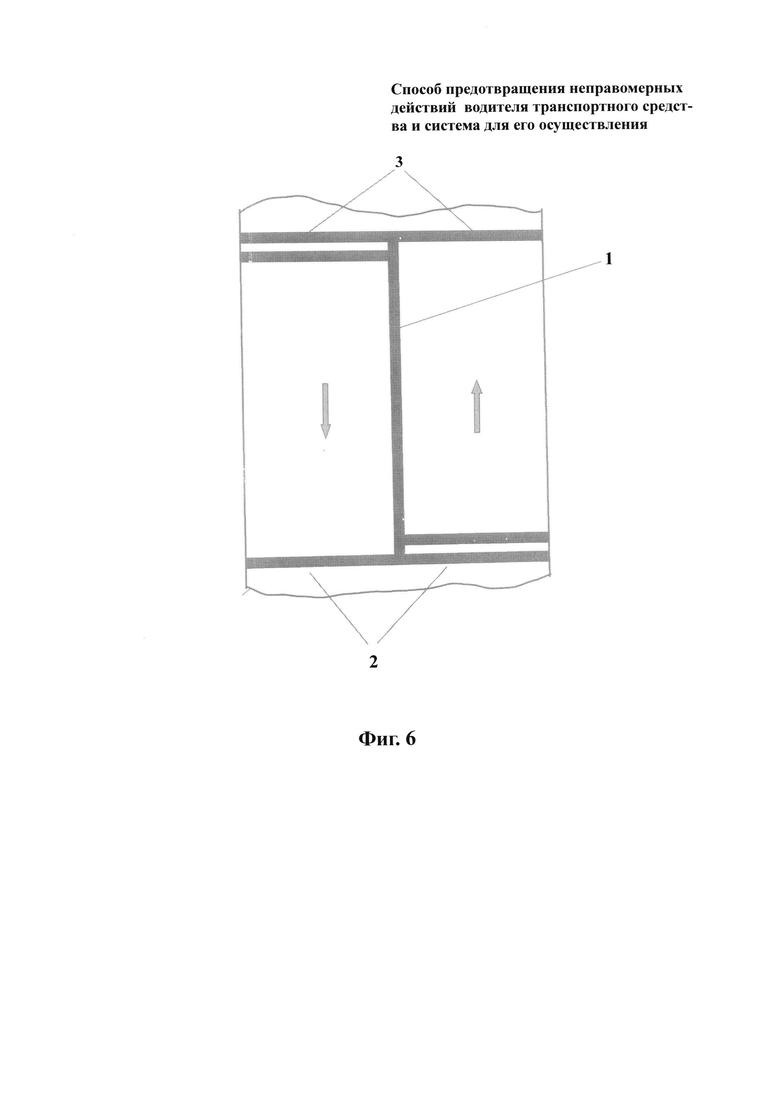
На фиг. 6 представлена схема горизонтальной дорожной разметки участка трассы с запретом обгонов по встречной полосе.
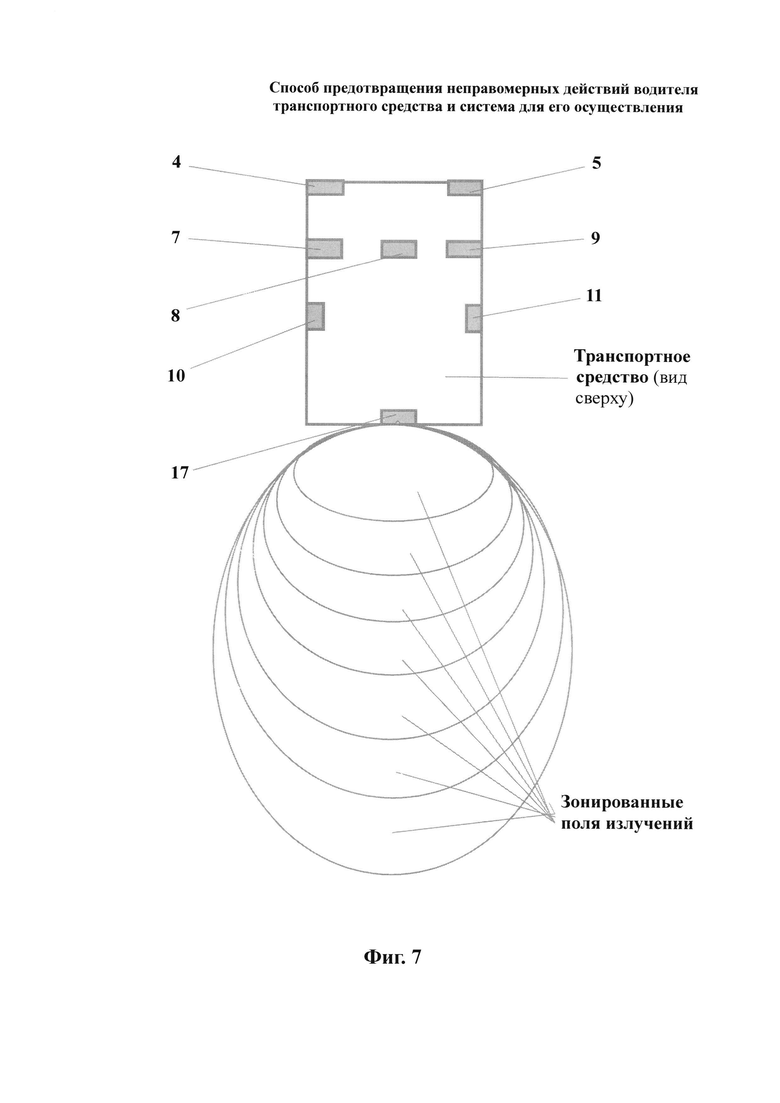
На фиг. 7 представлена схема размещения компонентов системы на борту транспортного средства. На чертежах использованы следующие обозначения:
1 - магнитная разделительная полоса;
2 - первая маркерная полоса;
3 - вторая маркерная полоса;
4 - левая линейка семи детекторов полей излучений;
5 - правая линейка семи детекторов полей излучений;
6 - цифровой регистратор путевой скорости;
7 - левый детектор постоянного магнитного поля;
8 - средний детектор постоянного магнитного поля;
9 - правый детектор постоянного магнитного поля;
10 - детектор присутствия объектов слева;
11 - детектор присутствия объектов справа;
12 - блок управления;
13 - первая исполнительная схема световой сигнализации;
14 - вторая исполнительная схема звуковой сигнализации;
15 - третья исполнительная схема управления дроссельной заслонкой подачи топлива в двигатель транспортного средства;
16 - четвертая исполнительная схема управления антиблокировачной системой (АБС) торможения транспортного средства;
17 - линейка излучателей зонированных полей излучений;
18 - блок обработки ситуаций сближения;
19 - блок обработки ситуаций обгона;
20 - первый логический элемент ИЛИ;
21 - второй логический элемент ИЛИ;
22 - третий логический элемент ИЛИ;
23 - четвертый логический элемент ИЛИ;
24 - первый логический элемент И;
25 - второй логический элемент И;
26 - третий логический элемент И;
27 - четвертый логический элемент И;
28 - двухразрядная пересчетная схема;
29 - дешифратор;
30 - первый ждущий мультивибратор;
31 - второй ждущий мультивибратор;
32 - S-триггер;
33 - первый логический элемент И-НЕ;
34 - второй логический элемент И-НЕ;
35 - третий логический элемент И-НЕ;
36 - четвертый логический элемент И-НЕ;
37 - пятый логический элемент И-НЕ;
38 - пятый логический элемент И;
39 - шестой логический элемент И;
40 - седьмой логический элемент И;
41 - восьмой логический элемент И;
42 - девятый логический элемент И;
43 - десятый логический элемент И;
44 - одиннадцатый логический элемент И;
45 - двенадцатый логический элемент И;
46 - тринадцатый логический элемент И;
47 - четырнадцатый логический элемент И;
48 - пятнадцатый логический элемент И;
49 - шестнадцатый логический элемент И;
50 - семнадцатый логический элемент И;
51 - восемнадцатый логический элемент И;
52 - девятнадцатый логический элемент И;
53 - двадцатый логический элемент И;
54 - двадцать первый логический элемент И;
55 - двадцать второй логический элемент И;
56 - пятый логический элемент ИЛИ;
57 - шестой логический элемент ИЛИ;
58 - седьмой логический элемент ИЛИ;
59 - логический элемент НЕ;
Система содержит на дорожном полотне магнитную разделительную полосу 1, первую 2 и вторую 3 поперечные маркерные полосы, а на борту транспортного средства левую 4 и правую 5 линейки по семи детекторов полей излучений, цифровой регистратор путевой скорости 6, левый 7, средний 8 и правый 9 детекторы постоянного магнитного поля, детекторы присутствия объектов слева 10 и справа 11, блок управления 12, первую 13, вторую 14, третью 15 и четвертую 16 исполнительные схемы, соответственно, световой сигнализации, звуковой сигнализации, управления дроссельной заслонкой подачи топлива в двигатель и управления антиблокировочной системой (АБС) торможения транспортного средства, а также линейку излучателей зонированных полей излучений. Семиразрядный выход левой линейки детекторов полей излучений-4 связан одноименными линиями с первым семиразрядным входом блока управления-12, семиразрядный выход правой линейки детекторов полей излучений-5 связан одноименными линиями со вторым семиразрядным входом блока управления-12, выход цифрового регистратора путевой скорости-6 транспортного средства связан с соответствием имен разрядов с третьим семиразрядным входом блока управления-12, выходы левого-7, среднего-8 и правого-9 детекторов магнитного поля связаны соответственно, с четвертым, пятым и шестым входами блока управления-12, выходы детекторов присутствия объектов слева-10 и справа-11 связаны, соответственно, с седьмым и восьмым входами блока управления 12, выход которого соединен с входами первой-13, второй-14, третьей-15 и четвертой-16 исполнительных схем управления, соответственно, световой сигнализацией, звуковой сигнализацией, дроссельной заслонкой и тормозами АБС.
Блок управления-12 содержит блок обработки ситуаций сближения-18, блок обработки ситуаций обгона-19 и первый логический элемент ИЛИ-20, причем первый, второй, третий семиразрядные входы блока обработки ситуаций сближения-18 представляют, соответственно, первый, второй, третий входы блока управления-12, четвертый, пятый и шестой входы блока обработки ситуаций сближения-18 представляют, соответственно, четвертый, седьмой и восьмой входы блока управления-12, первый, второй и третий входы блока обработки ситуаций обгона-19 представляют, соответственно, четвертый, пятый и шестой входы блока управления-12, четвертый семиразрядный вход блока обработки ситуаций обгона-19 совпадает с третьим семиразрядным входом блока управления-12, выход блока обработки ситуаций сближения-18 связан с первым входом первого логического элемента ИЛИ-20, второй вход которого подключен к выходу блока обработки ситуаций обгона-19, а выход первого логического элемента ИЛИ-20 представляет выход блока управления-12.
Блок обработки ситуаций обгона 19 содержит второй-21, третий-22 и четвертый-23 логические элементы ИЛИ, первый-24, второй-25, третий-26 и четвертый-27 логические элементы И, двухразрядную пересчетную схему-28, дешифратор-29, первый-30 и второй-31 ждущие мультивибраторы, S-триггер-32, причем первые входы второго-21 и третьего-22 логических элементов ИЛИ представляют, соответственно, первый и второй входы обработчика ситуаций обгона 19, первый, второй и третий входы первого логического элемента И-24 совпадают, соответственно, с первым, вторым и третьим входами блока обработки ситуаций обгона 19, выход первого логического элемента И-24 связан с первым (счетным) входом двухразрядной пересчетной схемы-28, параллельный выход которой связан со входом дешифратора-29, первый выход которого, соответствующий состоянию 00 пересчетной схемы-28, соединен со вторым входом второго логического элемента ИЛИ-21, второй выход дешифратора 29, соответствующий состоянию 01 пересчетной схемы-28, связан с входом первого ждущего мультивибратора-30 и первым входом четвертого логического элемента И-27, третий выход дешифратора-29, соответствующий состоянию 10 пересчетной схемы-28, связан с первым входом третьего логического элемента И-26, четвертый выход дешифратора-29, соответствующий состоянию 11 пересчетной схемы-28, соединен со входом второго ждущего мультивибратора-31, выход которого связан со вторым входом (сброс) пересчетной схемы-28, первый (прямой) и второй (инверсный) выходы первого ждущего мультивибратора-30 связаны, соответственно, со вторыми входами третьего 26 и четвертого 27 логических элементов И, выход третьего логического элемента И-26 связан с третьим входом второго логического элемента ИЛИ-21, выход четвертого логического элемента И-27 связан со вторым входом третьего логического элемента ИЛИ-22 и первым (счетным) входом пересчетной схемы 28, выходы второго-21 и третьего-22 логических элементов ИЛИ связаны, соответственно, со вторым (R) и первым (S) входами S-триггера-32, выход (прямой) которого соединен с первым входом второго логического элемента И-25, второй вход которого связан с выходом четвертого логического элемента ИЛИ-23, семиразрядный вход которого представляет четвертый семиразрядный вход блока обработки ситуаций обгона 19, а выход второго логического элемента И-25 представляет выход блока обработки ситуаций обгона 19.
Блок обработки ситуаций сближения-18 содержит первый-33, второй-34, третий-35, четвертый-36, пятый-37 логические элементы ИЛИ-НЕ, пятый-38, шестой -39, седьмой-40, восьмой-41, девятый-42, десятый-43, одиннадцатый-44, двенадцатый-45, тринадцатый-46, четырнадцатый-47, пятнадцатый-48, шестнадцатый-49, семнадцатый-50, восемнадцатый-51, девятнадцатый-52, двадцатый-53, двадцать первый-54 и двадцать второй-55 логические элементы И, а также пятый-56, шестой-57 и седьмой-58 логические элементы ИЛИ, логический элемент НЕ-59, причем первые входы пятого-38 и шестого-39 логических элементов И представляют линию 1-го разряда третьего семиразрядного входа обработчика ситуаций сближения-18, линии 2-7-разрядов которого связаны с шестиразрядным входом первого логического элемента ИЛИ-НЕ-33, выход которого связан со вторыми входами пятого-38 и шестого-39 логических элементов И, первые входы седьмого-40 и восьмого-41 логических элементов И представляют линию 2-го разряда третьего семиразрядного входа блока обработки ситуаций сближения-18, линии 3-7-разрядов которого связаны с пятиразрядным входом второго логического элемента ИЛИ-НЕ-34, выход которого связан со вторыми входами седьмого-40 и восьмого-41 логических элементов И, первые входы девятого-42 и десятого-43 логических элементов И представляют линию 3-го разряда третьего семиразрядного входа блока обработки ситуаций сближения-18, линии 4-7-разрядов которого связаны с четырехразрядным входом третьего логического элемента ИЛИ-НЕ-35, выход которого связан со вторыми входами девятого-42 и десятого-43 логических элементов И, первые входы одиннадцатого-44 и двенадцатого-45 логических элементов И представляют линию 4-го разряда третьего семиразрядного входа блока обработки ситуаций сближения-18, линии 5-7-разрядов которого связаны с трехразрядным входом четвертого логического элемента ИЛИ-НЕ-36, выход которого связан со втоми входами одиннадцатого-44 и двенадцатого-45 логических элементов И, первые входы тринадцатого-46 и четырнадцатого-47 логических элементов И представляют линию 5-го разряда третьего семиразрядного входа блока обработки ситуаций сближения-18, линии 6-7-разрядов которого связаны с двухразрядным входом пятого логического элемента ИЛИ-НЕ-37, выход которого связан со вторыми входами тринадцатого-46 и четырнадцатого-47 логических элементов И, первые входы пятнадцатого-48 и шестнадцатого-49 логических элементов И представляют линию 6-го разряда третьего семиразрядного входа блока обработки ситуаций сближения-18, линия 7-го разряда которого связаны с входом логического элемента НЕ-59 и первыми входами семнадцатого-50 и восемнадцатого-51 логических элементов И, третьи входы пятого-38, седьмого-40, девятого-42, одиннадцатого-44, тринадцатого-46 и пятнадцатого-48 логических элементов И представляют, соответственно, линии 1-го, 2-го, 3-го, 4-го, 5-го и 6-го разрядов первого семиразрядного входа блока обработки ситуаций сближения-18, линия 7-го разряда которого представляется вторым входом семнадцатого логического элемента И-50, третьи входы шестого-39, восьмого-41, десятого-43, двенадцатого-45, четырнадцатого-47 и шестнадцатого-49 логических элементов И представляют, соответственно, линии 1-го, 2-го, 3-го, 4-го, 5-го и 6-го разрядов второго семиразрядного входа блока обработки ситуаций сближения-18, линия 7-го разряда которого представляется вторым входом восемнадцатого логического элемента И-51, выходы пятого-38, седьмого-40, девятого-42, одиннадцатого-44, тринадцатого-46, пятнадцатого-48 и семнадцатого-50 логических элементов И связаны с семиразрядным входом пятого логического элемента ИЛИ-56, выходы шестого-39, восьмого-41, десятого-43, двенадцатого-45, четырнадцатого-47, шестнадцатого-49 и восемнадцатого-51 логических элементов И связаны с семиразрядным входом шестого логического элемента ИЛИ-57, выход пятого логического элемента ИЛИ-56 связан с первыми входами девятнадцатого-52 и двадцать первого-54 логических элементов И, выход шестого логического элемента ИЛИ-57 соединен со вторыми входами девятнадцатого-52, двадцатого-53 и двадцать второго-55 логических элементов И, первый вход двадцатого элемента И-53 представляет пятый вход блока обработки ситуаций сближения 18, второй вход двадцать первого логического элемента И-54 представляет шестой вход блока обработки ситуаций сближения-18, первый вход двадцать второго логического элемента И-55 представляет четвертый вход блока обработки ситуаций сближения-18, выходы девятнадцатого-52, двадцатого-53, двадцать первого-54 и двадцать второго-55 логических элементов соединены, соответственно, с первым, вторым, третьим и четвертым входами седьмого логического элемента ИЛИ-58, выход которого представляет выход блока обработки ситуаций сближения-18.
Система работает следующим образом. Использование системы возможно как, на трассе с обычной разметкой только с предотвращением опасных сближений попутных транспортных средств, так и на трассе с магнитной горизонтальной разметкой с полным объемом заявленных качеств. В первом случае левый-7, средний-8 и правый-9 детекторы магнитного поля и блок обработки ситуаций обгона-19 в блоке управления-12 в работе не участвуют, а выявление опасного сближения транспортного средства с впереди едущим транспортом обеспечивается с помощью левой-4 и правой-5 линеек детекторов полей излучений.. В заявляемой системе для определения количества и размеров зонированных полей излучений используется цифровая природа регистратора путевой скорости-6. При этом полагается достаточным указание значения скорости с помощью восьми двоичных разрядов. Это позволяет с точностью до единицы получать значение путевой скорости транспортного средства во всем диапазоне реально возможных на магистралях скоростей транспортных средств. По показаниям цифрового регистратора путевой скорости-6 выделяется семь возможных диапазонов скоростей транспортного средства:
0000001X соответствует диапазону [2,3] км/час;
000001XX соответствует диапазону [4,7] км/час;
00001XXX соответствует диапазону [8,15] км/час;
0001ХХХХ соответствует диапазону [16,31] км/час;
001ХХХХХ соответствует диапазону [32,63] км/час;
01ХХХХХХ соответствует диапазону [64,127] км/час;
1ХХХХХХХ соответствует диапазону [128,255] км/час,
где символ X подразумевает произвольное значение разряда 0 или 1. В практике вождения автотранспорта безопасной дистанцией между транспортными средствами в транспортном потоке считается расстояние, численно равное половине скорости транспортного потока и выраженное в метрах (Иванов В.Н. Наука управления автомобилем. М. «Транспорт», 1990, с. 150). Следовательно, для каждого выделенного диапазона скоростей можно вполне определенно указать соответствующую безопасную дистанцию в транспортном потоке, основываясь на верхней границе диапозона. Получим:
для диапзона [2,3] км/час дистанция равна 1.5 м;
для диапозона [4,7] км/час дистанция равна 3.5 м;
для диапозона [8,15] км/час дистанция равна 7.5 м;
для диапозона [16,31] км/час дистанция равна 15.5 м;
для диапозона [32,63] км/час дистанция равна 31.5 м;
для диапозона [64,127] км/час дистанция равна 63.5 м;
для диапозона [127,255] км/час дистанция равна 127.5 м.
Возможная коррекция приведенных значений безопасных дистанций для разных диапазонов скоростей транспортного потока на основе экспертных оценок не меняет заявляемого способа и системы. Полученные в итоге значения безопасных дистанций для различных диапазонов скоростей определяют длины соответствующих зонированных полей излучений, создаваемых линейкой излучателей зонированных полей излучений-17. Поскольку все излучатели линейки-17 находятся в одном месте и направления их излучения совпадают, то происходит суперпозиция диаграмм их излучения как показано на фиг. 6. По мере сближения транспортного средства с впереди едущим транспортом с такой линейкой излучателей, происходит обнаружение полей излучений, в которые вторгается транспортное средство, рядом детекторов излучения в левой-4 и/или правой-5 линейке детекторов полей излучений. Для дальнейшей обработки в блоке управления-12, а именно в блоке обработки ситуаций сближения-18 интерес представляет лишь факт наличия или отсутствия сигнала от детектора соответствующего зоне излучения, определяющей безопасную дистанцию между транспортными средствами при текущей скорости транспортного средства. Цифровой регистратор путевой скорости-6 в виде двоичного кода выдает ее текущее значение на третий семиразрядный вход блока управления 12, и далее на третий семиразрядный вход блока обработки ситуаций сближения-18. В этом блоке с помощью первого-33, второго-34, третьего-35, четвертого-36, пятого-37 логических элементов ИЛИ-НЕ, логического элемента НЕ-59 играющих роль логических масок, а также пятого-38, шестого-39, седьмого-40, восьмого-41, девятого-42, десятого-43, одиннадцатого-44, двенадцатого-45, тринадцатого-46, четырнадцатого-47, пятнадцатого-48, шестнадцатого-49, семнадцатого-50 и восемнадцатого-51 логических элементов И, определяется диапазон скоростей к которому принадлежит текущая путевая скорость транспортного средства и на основе сопоставления с сигналами от левой-4 и правой-5 линеек детекторов полей излучений, поступающими в виде семиразрядных двоичных кодов, соответственно, через первый и второй семиразрядные входы блока управления-12 и далее через первый и второй семиразрядные входы блока обработки ситуаций сближения-18 на перечисленные выше логические элементы И. Если транспортное средство вторгается в зону излучения, определяющую безопасную межтранспортную дистанцию для текущей скорости транспортного средства, т.е. происходит нарушение безопасной дистанции, то на выходах одного или двух соответствующих логических элементов И из элементов 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50 и 51 возникают единичные сигналы. Если, например, текущая путевая скорость транспортного средства имеет значение 40 км/час и происходит его опасное сближение с впереди едущим транспортом, то от цифрового регистратора путевой скорости-6 на третий семиразрядный вход блока обработки ситуаций сближения-18 проходит двоичный код 0010100, возникают единичные сигналы на первых входах девятого-42, десятого-43, тринадцатого-46 и четырнадцатого-47, а также вторых входах тринадцатого-46, четырнадцатого-47, пятнадцатого-48 и шестнадцатого-49 логических элементов И. На первых входах пятого-38, шестого-39, седьмого-40, восьмого-41, одиннадцатого-44, одиннадцатого-44, двенадцатого-45, пятнадцатого-48, шестнадцатого-49, семнадцатого-50 и восемнадцатого-51 логических элементов И в это время формируется нулевые сигналы.
Если имеет место опасное сближение только слева по фронту транспортного средства при той же его путевой скорости 40 км/час, то от левой-4 и правой-5 линеек полей излучений на первый и второй семиразрядные входы блока обработки ситуаций сближения-18 поступают коды, соответственно, 1110000 и 0000000. Тогда,, единичный сигнал возникает только на выходе тринадцатого логического элемента И-46, а на выходах пятого-38, шестого-39, седьмого-40, восьмого-41, девятого-42, десятого-43, одиннадцатого-44, двенадцатого-45, четырнадцатого-47, пятнадцатого-48, шестнадцатого-49, семнадцатого-50 и восемнадцатого-51 логических элементов И формируются нулевые сигналы.
Если же имеет место опасное сближение только справа по фронту транспортного средства при той же его путевой скорости 40 км/час, то от левой-4 и правой -5 линеек полей излучений на первый и второй семиразрядные входы блока обработки ситуаций сближения-18 поступают коды, соответственно, 0000000 и 1110000. Тогда, очевидно, единичный сигнал возникает только на выходе четырнадцатого логического элемента И-47, а на выходах пятого-38, шестого-39, седьмого-40, восьмого-41, девятого-42, десятого-43, одиннадцатого-44, двенадцатого-45, тринадцатого-46, пятнадцатого-48, шестнадцатого-49, семнадцатого-50 и восемнадцатого-51 логических элементов И формируются нулевые сигналы.
В случае опасного сближения транспортного средства с впереди едущим транспортом и возникновения единичных сигналов на выходах одного или двух логических элементов И из множества элементов 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, они через пятый логический элемент ИЛИ-56 поступают на первые входы девятнадцатого-52 и двадцать первого-54 логических элементов И, а через шестой логический элемент ИЛИ-57 поступают на вторые входы девятнадцатого-52, двадцатого-53 и двадцать второго-55 логических элементов И. Если на первом и втором входах девятнадцатого логического элемента И-52 сформировались единицы, то это означает опасное сближение транспортного средства по всему переднему фронту. Тогда на выходе девятнадцатого логического элемента И-52 формируется единичный сигнал, который через седьмой логический элемент ИЛИ-58 поступает на выход блока обработки ситуаций сближения-18 и далее через первый элемент ИЛИ-20 и выход блока управления-12 поступают на входы первой-13, второй-14, третьей-15 и четвертой 16 исполнительной схемы управления, соответственно, световой сигнализацией, звуковой сигнализации, дроссельной заслонкой и антиблокировочной системы торможения (АБС). В результате указанных действий помимо внутренней и внешней сигнализации, сокращается подача топлива в двигатель транспортного средства и приводится в действие его система торможения. Скорость транспортного средства снижается, а дистанция до впереди едущего транспорта увеличивается. Это происходит до исчерпания ситуации опасного сближения транспортных средств, признаком чего является одновременное формирование нулевых сигналов на выходах пятого-38, шестого-39, седьмого-40, восьмого-41, девятого-42. десятого-43, одиннадцатого-44, двенадцатого-45, тринадцатого-46, четырнадцатого-47, пятнадцатого-48, шестнадцатого-49, семнадцатого-50 и восемнадцатого-51 логических элементов И, хотя на некоторых линиях семиразрядных выходов левой-4 и правой-5 линеек детекторов полей излучений в это время могут формироваться единичные сигналы. Как следствие, происходит формирование нулевого сигнала на выходе седьмого логического элемента ИЛИ-58 с последующим прекращением указанных выше действий по предотвращению опасного сближения транспортных средств. Если единичный сигнал сформировался только на выходе шестого логического элемента ИЛИ-57, а на выходе пятого логического элемента ИЛИ-56 имеет место нулевой сигнал, то это означает, что возникло опасное сближение с впереди едущим транспортом только по правому краю данного транспортного средства. Такая ситуация может возникнуть, например, при попытке обгона транспортным средством слева впереди едущего транспорта. Тогда, если на выходе детектора присутствия объектов слева-10 в это время имеет место единичный сигнал, который через седьмой вход блока управления-12 и далее через пятый вход блока обработки ситуаций сближения-18 поступает на первый вход двадцатого логического элемента И-53, то возникает единичный сигнал на выходе двадцатого логического элемента-53. Этот единичный сигнал через седьмой логический элемент ИЛИ-53 проходит входы первой-13, второй-14, третьей-15 и четвертой 16 исполнительных схем соответственно, световой, звуковой, управления дроссельной заслонкой и тормозной системы АБС, вызывая описанные выше действия по снижению скорости транспортного средства до исчезновения ситуации опасной ситуации. Если же в это время слева от транспортного средства нет других транспортных средств, то водителю разрешается продолжать маневр по обгону слева, в том числе и по встречной полосе, едущего впереди транспорта.
Если единичный сигнал сформировался только на выходе пятого логического элемента ИЛИ-56, а на выходе шестого логического элемента ИЛИ-57 имеет место нулевой сигнал, то это означает, что возникло опасное сближение с впереди едущим транспортом только по левому краю данного транспортного средства. Такая ситуация может возникнуть, например, при попытке обгона справа транспортным средством впереди едущего транспорта. Тогда, если на выходе детектора присутствия объектов справа-11 в это время имеет место единичный сигнал, который через восьмой вход блока управления-12 и далее через шестой вход блока обработки ситуаций сближения-18 поступает на второй вход двадцать первого логического элемента И-54, то возникает единичный сигнал на выходе двадцать первого логического элемента-54. Этот единичный сигнал через седьмой логический элемент ИЛИ-58 проходит на входы первой-13, второй-14, третьей-15 и четвертой 16 исполнительных схем, соответственно, световой, звуковой, управления дроссельной заслонкой и тормозной системы АБС, вызывая устранение ситуации опасного сближения. Если же в это время справа от транспортного средства нет других транспортных средств, то водителю разрешается продолжать маневр по обгону справа едущего впереди транспорта.
Наконец, если транспортное средство едет по участку трассы с запретом обгонов по встречной полосе и возникает ситуация опасного сближения по правому краю транспортного средства, т.е. возникает единичный сигнал на выходе шестого логического элемента ИЛИ-57 при наличии нулевого сигнала на выходе пятого логического элемента ИЛИ-56, но при этом имеет место единичный сигнал на выходе левого детектора постоянного магнитного поля-7, который через четвертый вход блока управления 12 и далее через четвертый вход блока обработки ситуаций сближения-18 поступает на первый вход двадцать второго логического элемента И-55, то на выходе этого элемента формируется единичный сигнал блокировки сближения. Этот сигнал через седьмой логический элемент ИЛИ-58 поступает на входы первой-13, второй-14, третьей-15, четвертой исполнительных схем управления, соответственно, световой сигнализацией, звуковой сигнализацией, дроссельной заслонкой и системой АБС, вызывая описанные выше действия по снижению путевой скорости транспортного средства до исчезновения ситуации опасного сближения транспортных средств с блокированием попытки обгона по встречной полосе.
Теперь рассмотрим работу заявляемого устройства по предотвращению запрещенных обгонов попутных транспортных средств. Предполагается, что перед въездом на участок трассы со сплошной разделительной полосой все элементы с памятью блока обработки ситуаций обгона 19, в частности, S-триггер-32, пересчетная схема-28, а также первый 30 и второй 31 ждущие мультивибраторы находятся в начальном нулевом состоянии и на выходах левого 7, среднего 8 и правого 9 детекторов постоянного магнитного поля имеют место нулевые сигналы. Тогда имеют место нулевые сигналы и на первом, втором и третьем входах блока обработки ситуаций обгона 19, которые, очевидно, не меняют указанные нулевые состояния S-триггера 32, пересчетной схемы 28 и первого 30 и второго 31 ждущих мультивибраторов. Следовательно, в этой ситуации на первый вход второго логического элемента И 25 с первого (прямого) выхода S-триггера 32 подается нулевой сигнал, следствием чего является наличие нулевого сигнала на выходе второго логического элемента И 25, представляющего выход блока обработки ситуаций обгона 19. Тогда, если в это время не возникает ситуации опасного сближения попутных транспортных средств и не только на втором, но и на первом входе первого логического ИЛИ 20 имеют место нулевые сигналы, то формируется нулевой сигнал и на его выходе. Поскольку выход первого логического элемента ИЛИ 20 представляет выход блока управления 12, то имеют место нулевые сигналы входах первой 13, второй 14, третьей 15 и четвертой 16 исполнительных схем управления, соответственно, световой сигнализацией, звуковой сигнализацией, дроссельной заслонкой и тормозами АБС, не принуждая их к действию.
При неправомерном въезде транспортного средства на участок трассы со сплошной разделительной полосой 1, т.е. хотя бы с частичным заходом на встречную полосу при пересечении входной маркерной полосы 2 или 3 происходит однократное одновременное срабатывание левого-7, среднего-8 и правого-8 детекторов постоянного магнитного поля и единичные сигналы с выходов указанных блоков поступают, соответственно, через четвертый, пятый и шестой входы блока управления-12 и далее, соответственно, на первый, второй и третий входы блока обработки ситуаций обгона-19. С первого входа блока обработки ситуаций обгона-19 единичный сигнал поступает на первые входы первого логического элемента И-24 и второго логического элемента ИЛИ-21. Со второго входа блока обработки ситуаций обгона-19 единичный сигнал поступает на второй вход первого логического элемента И-24 и первый вход третьего логического элемента ИЛИ-22. С третьего входа блока обработки ситуаций обгона-19 единичный сигнал поступает на третий вход первого логического элемента И-24. В результате наличия единичных сигналов на всех трех входах первого логического элемента И-24 на его выходе формируется единичный сигнал, который проходит на первый (счетный) вход двухразрядной пересчетной схемы-28, переводя ее из состояния 00 в состояние 01. Параллельный двухразрядный код с выхода пересчетной схемы 28 поступает на двухразрядный вход дешифратора-29, который преобразует его в унитарный код в виде единичного сигнала на своем втором выходе. Этот единичный сигнал поступает на вход первого ждущего мультивибратора-30 и запускает его, а также поступает на первый вход четвертого логического элемента И-27. Запущенный первый ждущий мультивибратор-30 по своему первому (прямому) выходу вырабатывает на второй вход третьего логического элемента И 26 единичный сигнал длительностью не меньше времени пересечения транспортным средством двойной части маркерной полосы с минимальной возможной скоростью. При минимально возможной скорости 1 км/час и ширине двойной части первой-2 или второй-3 маркерной полосы в 1 м это примерно 3.6 сек. Во время наличия единичного сигнала на первом (прямом) выходе первого ждущего мультивибратора-30 на его втором (инверсном) выходе формируется нулевой сигнал, который поступает на второй вход четвертого логического элемента И-27. В это время на третьем выходе дешифратора-29 имеет место нулевой сигнал, который поступает на первый вход третьего логического элемента И-26. В это же время на первом и четвертом выходах дешифратора-29 также имеют место нулевые сигналы, которые поступают, соответственно, на второй вход второго логического элемента ИЛИ 21 и вход второго ждущего мультивибратора-31. Поэтому во время неправомерного проезда транспортным средством входной первой-2 или второй-3 маркерной полосы на выходах третьего-26 и четвертого-27 логических элементов И имеют место нулевые сигналы, которые поступают, соответственно, на четвертый вход второго логического элемента ИЛИ-21 и второй вход третьего логического элемента ИЛИ-22. В результате единичные сигналы с первых входов второго-21 и третьего-22 логических элементов ИЛИ проходят одновременно на второй (R) вход и первый (S) вход S-триггера-32, что переводит его в единичное состояние. Поэтому на (прямом) выходе S-триггера-32 формируется единичный сигнал, который поступает на первый вход второго логического элемента И-25. После завершения импульса, формируемого первым ждущим мультивибратором 30, на его втором (инверсном) выходе сформируется единичный сигнал, который поступает на первый (счетный) вход двухразрядной пересчетной схемы 28 и второй вход третьего логического элемента 22. В результате двухразрядная пересчетная схема 28 перейдет в состояние 10 и произойдет подтверждение единичного состояния S-триггера.
В это время, если транспортное средство движется, то в параллельном коде значения его скорости, который поступает с семиразрядного выхода цифрового регистратора путевой скорости-6, через третий семиразрядный вход блока управления-12 и далее через четвертый семиразрядный вход блока обработки ситуаций обгона-19 имеется хотя бы одна единица, и после преобразования этого кода четвертым логическим элементом ИЛИ-23 с его выхода на второй вход второго логического элемента И-25 поступает единичный сигнал. В результате на выходе второго логического элемента И-25, который представляет выход блока обработки ситуаций обгона-19 формируется единичный сигнал, который через первый логический элемент 20 поступает на входы первой 13, второй 14, третьей 15 и четвертой 16 исполнительных схем управления, соответственно, световой сигнализацией, звуковой сигнализацией, дроссельной заслонкой и тормозами АБС. В итоге скорость транспортного средства автоматически гасится до тех пор пока в старших семи разрядах цифрового значения скорости не сформируются нулевые сигналы, то есть до 1 км/час. Тогда на втором входе второго логического элемента И 25 формируется нулевой сигнал, который приводит к появлению нулевого сигнала на его выходе и, следовательно, на выходе блока обработки ситуаций обгона 19. Разблокирование скорости транспортного средства происходит лишь в случае его медленного со скоростью 1 км/час выруливания вправо на свою разрешенную полосу. При этом в процессе поперечного смещения транспортного средства вправо над магнитной разделительной 1 будут последовательно, возможно в смежной комбинации, справа налево реагировать правый 9, средний 8 и левый 7 детекторы постоянного магнитного поля. Из всех соответствующих единичных сигналов на первом, втором и третьем входах блока обработки ситуаций обгона 19 и их комбинаций изменяет состояние S-триггера 32 на нулевое только унарный единичный сигнал с выхода левого 7 детектора постоянного магнитного поля по первому входу блока обработки ситуаций обгона 19. Эта ситуация соответствует завершению возвращения транспортного средства на свою разрешенную полосу. При переходе S-триггера 32 в нулевое состояние на его первом (прямом) выходе формируется нулевой сигнал, который поступает на первый вход второго логического элемента И 25 и тем самым обнуляет сигнал на его выходе и, соответственно, на выходе блока обработки ситуаций обгона 19. В итоге на входах первой 13, второй 14, третьей 15 и четвертой 16 исполнительных схем управления, соответственно, световой сигнализацией, звуковой сигнализацией, дроссельной заслонкой и тормозами АБС формируется нулевой сигнал, по которому они прекращают свое действие в связи с исчезновением ситуации запрещенного обгона. При правомерном въезде транспортного средства на участок трассы со сплошной разделительной полосой 1 по своей разрешенной полосе оно пересекает двойную часть входного маркера 2 или 3 и возникают последовательно два одновременных срабатывания левого 7, среднего 8 и правого 9 детекторов постоянного магнитного поля. По первому такому событию, как показано выше, пересчетная схема 28 переходит в состояние 01, запускается первый ждущий мультивибратор 30 и S-триггер 32 переходит в единичное состояние. По второму одновременному срабатыванию левого 7, среднего 8 и правого 9 детекторов постоянного магнитного поля пересчетная схема 28 переходит в состояние 10 и одновременно единичные сигналы на втором(R) и первом(S)-входах S-триггер 32 подтвердят его единичное состояние. Однако, поскольку длительность импульса первого ждущего мультивибратора 30 больше времени пересечения детекторами постоянного магнитного поля 7, 8, 9, то после завершения их повторного срабатывания оказывается, что на первый вход третьего логического элемента И 26 поступает единичный сигнал с третьего выхода дешифратора 29, а на второй вход - единичный сигнал с первого (прямого) выхода первого ждущего мультивибратора 30. В результате на выходе третьего логического элемента И 26 формируется единичный сигнал, который по четвертому входу через второй логический элемент ИЛИ 21 поступает на второй (R)-вход S-триггера 32 и перебрасывает его в нулевое состояние. На прямом выходе S-триггера 32 формируется нулевой сигнал, который поступая на первый вход второго логического элемента И 25, обнуляет сигнал на его выходе и тем самым прекращается блокирование действий исполнительных схем управления первой 13, второй 14, третьей 15 и четвертой 16, соответственно, световой сигнализации, звуковой сигнализации, дроссельной заслонкой и тормозами АБС. Поскольку период блокирования скорости в данном случае незначителен (всего около 0.3 сек), то в силу определенной инерционности систем световой, звуковой, подачи топлива и торможения они просто не успеют включиться и транспортное средство поедет дальше без препятствий с прежней скоростью.
Если при перемещении транспортного средства внутри участка трассы со сплошной разделительной полосой 1 оно начинает выезжать для совершения запрещенного обгона на встречную полосу, то в какой-то момент одновременно срабатывает левый 7 и средний 8 детекторы постоянного магнитного поля и единичные сигналы с первого и второго входов блока обработки ситуаций обгона 19 одновременно поступают на второй (R) вход и первый (S) вход S-триггера 32, которые переводят его в единичное состояние. То же самое происходит при унарном срабатывании среднего 8 детектора постоянного магнитного поля и прохождении единичного сигнала только на первый (S) вход S-триггера 32. Поэтому на выходе второго логического элемента 25 при любой скорости транспортного средства больше 1 км/час формируется единичный сигнал, который приводит в действие первую 13, вторую 14, третью 15 и четвертую 16 исполнительные схемы управления, соответственно, световой сигнализацией, звуковой сигнализацией, дроссельной заслонкой и тормозами АБС. В результате скорость транспортного средства автоматически падает до 1 км/час, давая водителю транспортного средства возможность медленно вернуться на свою разрешенную полосу. Состояние других элементов с памятью блока обработки ситуаций обгона 19, а именно, двухразрядной пересчетной схемы 28, первого 30 и второго 31 ждущих мультивибраторов не изменится, так как, очевидно, при поперечном смещении транспортного средства относительно сплошной разделительной полосы 1 не могут одновременно возникнуть единичные сигналы на всех входах первого логического элемента И 24. Признаком возвращения транспортного средства на свою разрешенную полосу является появление унарного единичного сигнала на выходе левого 7 детектора постоянного магнитного поля и, следовательно, на первом входе блока обработки ситуаций обгона 19 и далее на втором (R) входе S-32. В результате S-триггер 32 перебрасывается в нулевое состояние, на выходе второго логического элемента И формируется нулевой сигнал и снимаются ограничения на скоростной режим транспортного средства, а также прекращаются соответствующие световые и звуковые сигналы. Покинуть участок трассы с запретом обгонов по встречной полосе транспортное средство может как по своей разрешенной полосе, так и. очевидно, с выездом на встречную полосу. В любом варианте происходит, по крайней мере, однократное одновременное срабатывание левого 7, среднего 8 и правого 9 детекторов постоянного магнитного поля при пересечении выходной маркерной полосы 3 или 2, что приводит к одновременному появлению единичных сигналов на первом, втором и третьем входах блока обработки ситуаций обгона 19. Это, очевидно, приводит к переходу S-триггера 32 в единичное состояние и одновременно к переходу пересчетной схемы 28 в состояние 11. В результате на четвертом выходе дешифратора 29 формируется унарный единичный сигнал, который поступает на вход второго ждущего мультивибратора 31 и запускает его. Длительность импульса этого мультивибратора выбирается из тех же соображений и такой же, как и первого ждущего мультивибратора 30. Поэтому независимо от того будет или нет второе одновременное срабатывание левого 7, среднего 8 и правого 9 детекторов постоянного магнитного поля, по времени сразу после завершения импульса, формируемого вторым ждущим мультивибратором 31, на его выходе (инверсном) формируется единичный сигнал, который поступая на второй (сброс) вход пересчетной схемы 28, переведет ее в нулевое состояние 00. В итоге на первом выходе дешифратора 29 сформируется единичный сигнал, который поступая на второй (R) вход S-триггера 32, переведет его в нулевое состояние, с очевидным снятием единичных сигналов на входах первой 13, второй 14, третьей 15 четвертой 16 схем управления, соответственно, световой сигнализацией, звуковой сигнализацией, дроссельной заслонкой и тормозами АБС. Перечисленные системы в силу определенной инерционности не успеют сработать и транспортное средство далее поедет без каких-либо ограничений, а все элементы с памятью блока обработки ситуаций обгона 19 приобретут начальные нулевые состояния.
Как видно из вышеизложенного, предлагаемые способ и система для его реализации обеспечивают повышение надежности предотвращения опасных сближений транспортных средств, поскольку оценка безопасности дистанции между транспортными средствами производится по «прямым сигналам», тогда как в аналогах и прототипах это производится на основе «отраженных сигналов» с высоким уровнем помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310922C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2450365C2 |
| УСТРОЙСТВО СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ АВТОМОБИЛЯ | 1999 |
|
RU2161814C1 |
| СПОСОБ ПОМОЩИ ВОДИТЕЛЯМ ПРИ ПЕРЕСТРОЕНИЯХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2646782C2 |
| ТРЕНАЖЕР ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025784C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2625213C2 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ ДВИЖЕНИИ В КОЛОННЕ | 2007 |
|
RU2388057C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550566C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |

Изобретение относится к области управления движением транспортных средств и предназначено для принудительного обеспечения транспортной дисциплины в условиях насыщенных транспортных потоков на магистралях со встречным движением, не имеющих разделительных сооружений. Способ предотвращения неправомерных действий водителя транспортного средства и система для его осуществления заключаются в принудительном автоматическом снижении скорости транспортного средства посредством сокращения подачи топлива в двигатель в случаях опасного сближения попутных транспортных средств или выезда транспортного средства на встречную полосу для выполнения запрещенного обгона до устранения указанных ситуаций. Нарушение безопасной дистанции до впереди едущего транспортного средства определяют при обнаружении вхождения транспортного средства в область зонированных полей излучений, создаваемых позади себя впереди едущим транспортным средством. Выход транспортного средства на встречную полосу для совершения запрещенного обгона определяют при обнаружении в области середины днища транспортного средства постоянного магнитного поля, создаваемого сплошной разделительной полосой. Начало и конец участка трассы с запретом обгонов по встречной полосе определяют по кратковременным обнаружениям постоянного магнитного поля под днищем транспортного средства, а также в боковых и средней областях. Обеспечивается повышение безопасности дорожного движения на двунаправленных трассах без разделительных сооружений между транспортными потоками. 2 н. и 7 з.п. ф-лы, 7 ил.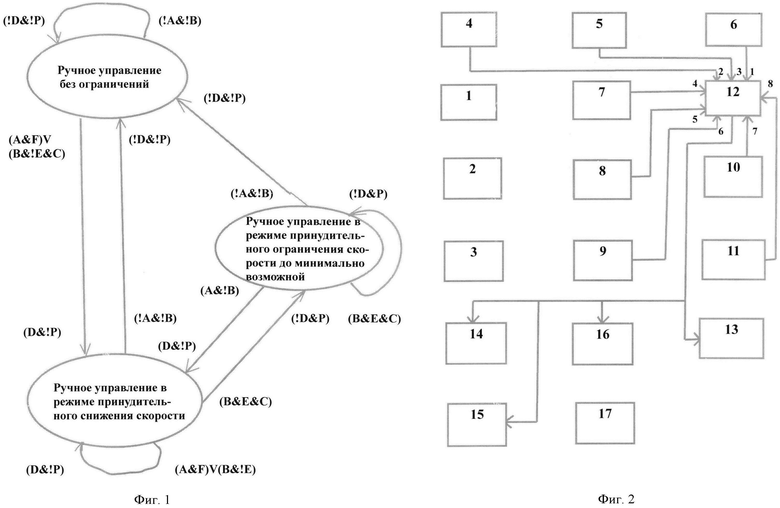
1. Способ предотвращения неправомерных действий водителя транспортного средства на двунаправленной трассе без разделительных сооружений между встречными транспортными потоками, в котором используют операцию принудительного снижения путевой скорости транспортного средства посредством небольшого уменьшения выходной мощности его двигателя, отличающийся тем, что предварительно размещают на дорожном полотне магнитную полосу, разделяющую встречные транспортные потоки, первую и вторую поперечные магнитные маркерные линии на концах участков трассы с запретом обгонов по встречной полосе и дополнительно используют:
- операцию контроля безопасности дистанции до впереди едущего транспортного средства для текущей скорости транспортного потока на основе регистрации зонированных полей излучений, создаваемых позади себя впереди едущим транспортным средством;
- операцию контроля выхода транспортного средства на встречную полосу на основе анализа истории сигналов обнаружения постоянного магнитного поля в области его днища, создаваемых магнитной разделительной полосой;
- операцию контроля нахождения транспортного средства на участке трассы с запретом обгонов по встречной полосе на основе анализа истории сигналов обнаружения постоянного магнитного поля в области его днища, создаваемых поперечными маркерными полосами на концах такого участка трассы;
- операцию контроля наличия минимальной ненулевой скорости транспортного средства;
- операцию контроля возможности поперечных маневров транспортного средства на основе анализа сигналов соответствующих средств обнаружения объектов слева и справа;
- операцию принудительного ограничения скорости транспортного средства до минимального ненулевого значения посредством принудительного ограничения выходной мощности его двигателя, причем все перечисленные контрольные операции выполняют постоянно и одновременно, а исполнительные операции выполняют по мере формирования условий их осуществимости.
2. Способ по п. 1, отличающийся тем, что область зонированных полей излучений создают посредством излучения позади транспортного средства в одном направлении вдоль трассы нескольких полей различной протяженности и различными параметрами излучения, например частотой, причем протяженность каждого такого поля соответствует безопасной дистанции между транспортными средствами при определенной скорости транспортного потока, а вместе указанные поля излучения покрывают весь реально возможный диапазон скоростей транспортного потока.
3. Способ по п. 1, отличающийся тем, что снижение выходной мощности двигателя транспортного средства выполняют посредством сокращения подачи топлива в двигатель транспортного средства с одновременным включением антиблокировочной системы торможения, световой и звуковой сигнализации.
4. Способ по п. 1, отличающийся тем, что магнитная полоса, разделяющая встречные транспортные потоки, сформирована, например, посредством использования грунтовой магнитной краски под обычную дорожную краску при разметке сплошной разделительной полосы на участке трассы с запретом обгонов по встречной полосе.
5. Способ по п. 1, отличающийся тем, что первая и вторая поперечные магнитные маркерные линии на концах участков трассы с запретом обгонов по встречной полосе удваиваются на дорожном полотне по ходу транспортного потока и формируются так же, как и магнитная полоса, разделяющая встречные транспортные потоки.
6. Система для осуществления способа по п. 1, содержащая на борту транспортного средства цифровой регистратор путевой скорости, своим семиразрядным выходом подключенный к одноименным линиям первого семиразрядного входа блока управления, выход которого связан с входами первой, второй, третьей и четвертой исполнительных схем соответственно световой сигнализации, звуковой сигнализации, управления дроссельной заслонкой подачи топлива в двигатель транспортного средства и управления его антиблокировочной системой торможения, отличающаяся тем, что на борту транспортного средства размещены левая и правая линейки по семь детекторов излучения, левый, средний и правый детекторы постоянного магнитного поля, детекторы присутствия объектов слева и справа, линейка семи излучателей зонированных полей излучений, причем левая и правая линейки по семь детекторов излучений расположены во фронтальной части транспортного средства, левый, средний и правый детекторы постоянного магнитного поля расположены на днище транспортного средства, детекторы присутствия объектов слева и справа размещены по бортам транспортного средства, линейка семи излучателей зонированных полей излучений расположена в задней части транспортного средства, семиразрядный выход левой линейки детекторов полей излучений связан одноименными линиями со вторым семиразрядным входом блока управления, семиразрядный выход правой линейки детекторов полей излучений связан одноименными линиями с третьим семиразрядным входом блока управления, выходы левого, среднего и правого детекторов магнитного поля связаны соответственно с четвертым, пятым и шестым входами блока управления, выходы детекторов присутствия объектов слева и справа связаны соответственно с седьмым и восьмым входами блока управления.
7. Система по п. 6, отличающаяся тем, что блок управления содержит блок обработки ситуаций сближения, блок обработки ситуаций обгона и первый логический элемент ИЛИ, причем первый, второй, третий семиразрядные входы блока обработки ситуаций сближения представляют соответственно второй, третий и первый входы блока управления, четвертый, пятый и шестой входы блока обработки ситуаций сближения представляют соответственно четвертый, седьмой и восьмой входы блока управления, первый, второй и третий входы блока обработки ситуаций обгона представляют соответственно четвертый, пятый и шестой входы блока управления, четвертый семиразрядный вход блока обработки ситуаций обгона совпадает с третьим семиразрядным входом блока управления, выход блока обработки ситуаций сближения связан с первым входом первого логического элемента ИЛИ, второй вход которого подключен к выходу блока обработки ситуаций обгона, а выход первого логического элемента ИЛИ представляет выход блока управления.
8. Система по п. 7, отличающаяся тем, что блок обработки ситуаций обгона содержит второй, третий, четвертый логические элементы ИЛИ, первый, второй, третий и четвертый логические элементы И, двухразрядную пересчетную схему, дешифратор, первый и второй ждущие мультивибраторы, S-триггер, причем первые входы второго и третьего логических элементов ИЛИ представляют соответственно первый и второй входы блока обработки ситуаций обгона, первый, второй и третий входы первого логического элемента И совпадают соответственно с первым, вторым и третьим входами блока обработки ситуаций обгона, выход первого логического элемента И связан с первым (счетным) входом двухразрядной пересчетной схемы, параллельный выход которой связан со входом дешифратора, первый выход которого, соответствующий состоянию 00 двухразрядной пересчетной схемы, соединен со вторым входом второго логического элемента ИЛИ, второй выход дешифратора, соответствующий состоянию 01 двухразрядной пересчетной схемы, связан с входом первого ждущего мультивибратора и первым входом четвертого логического элемента И, третий выход дешифратора, соответствующий состоянию 10 двухразрядной пересчетной схемы, связан с первым входом третьего логического элемента И, четвертый выход дешифратора, соответствующий состоянию 11 двухразрядной пересчетной схемы, соединен с входом второго ждущего мультивибратора, выход которого связан со вторым входом (сброс) двухразрядной пересчетной схемы, первый (прямой) и второй (инверсный) выходы первого ждущего мультивибратора связаны соответственно со вторыми входами третьего и четвертого логических элементов И, выход третьего логического элемента И связан с третьим входом второго логического элемента ИЛИ, выход четвертого логического элемента И связан со вторым входом третьего логического элемента ИЛИ, выходы второго и третьего логических элементов ИЛИ связаны соответственно со вторым (R) и первым (S) входами S-триггера, (прямой) выход которого соединен с первым входом второго логического элемента И, второй вход которого связан с выходом четвертого логического элемента ИЛИ, семиразрядный вход которого представляет четвертый семиразрядный вход блока обработки ситуаций обгона, а выход второго логического элемента И представляет выход блока обработки ситуаций обгона.
9. Система по п. 7, отличающаяся тем, что блок обработки ситуаций сближения содержит первый, второй, третий, четвертый, пятый логические элементы ИЛИ-НЕ, логический элемент НЕ, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый, восемнадцатый, девятнадцатый, двадцатый, двадцать первый и двадцать второй логические элементы И, а также пятый, шестой и седьмой логические элементы ИЛИ, причем первые входы пятого и шестого логических элементов И представляют линию 1-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линии 2-7-разрядов которого связаны с шестиразрядным входом первого логического элемента ИЛИ-НЕ, выход которого связан со вторыми входами пятого и шестого логических элементов И, первые входы седьмого и восьмого логических элементов И представляют линию 2-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линии 3-7-разрядов которого связаны с пятиразрядным входом второго логического элемента ИЛИ-НЕ, выход которого связан со вторыми входами седьмого и восьмого логических элементов И, первые входы девятого и десятого логических элементов И представляют линию 3-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линии 4-7-разрядов которого связаны с четырехразрядным входом третьего логического элемента ИЛИ-НЕ, выход которого связан со вторыми входами девятого и десятого логических элементов И, первые входы одиннадцатого и двенадцатого логических элементов И представляют линию 4-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линии 5-7-разрядов которого связаны с трехразрядным входом четвертого логического элемента ИЛИ-НЕ, выход которого связан со вторыми входами одиннадцатого и двенадцатого логических элементов И, первые входы тринадцатого и четырнадцатого логических элементов И представляют линию 5-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линии 6-7-разрядов которого связаны с двухразрядным входом пятого логического элемента ИЛИ-НЕ, выход которого связан со вторыми входами тринадцатого и четырнадцатого логических элементов И, первые входы пятнадцатого и шестнадцатого логических элементов И представляют линию 6-го разряда третьего семиразрядного входа блока обработки ситуаций сближения, линия 7-го разряда которого связаны с входом логического элемента НЕ и первыми входами семнадцатого и восемнадцатого логических элементов И, третьи входы пятого, седьмого, девятого, одиннадцатого, тринадцатого и пятнадцатого логических элементов И представляют соответственно линии 1-го, 2-го, 3-го, 4-го, 5-го и 6-го разрядов первого семиразрядного входа блока обработки ситуаций сближения, линия 7-го разряда которого представляется вторым входом семнадцатого логического элемента И, третьи входы шестого, восьмого, десятого, двенадцатого, четырнадцатого и шестнадцатого логических элементов И представляют соответственно линии 1-го, 2-го, 3-го, 4-го, 5-го и 6-го разрядов второго семиразрядного входа блока обработки ситуаций сближения, линия 7-го разряда которого представляется вторым входом восемнадцатого логического элемента И, выходы пятого, седьмого, девятого, одиннадцатого, тринадцатого, пятнадцатого и семнадцатого логических элементов И связаны с семиразрядным входом пятого логического элемента ИЛИ, выходы шестого, восьмого, десятого, двенадцатого, четырнадцатого, шестнадцатого и восемнадцатого логических элементов И связаны с семиразрядным входом шестого логического элемента ИЛИ, выход пятого логического элемента ИЛИ связан с первыми входами девятнадцатого и двадцатого логических элементов И, выход шестого логического элемента ИЛИ соединен со вторыми входами девятнадцатого, двадцатого и двадцать второго логических элементов И, первый вход двадцатого элемента И представляет пятый вход блока обработки ситуаций сближений, второй вход двадцать первого логического элемента И представляет шестой вход блока обработки ситуаций сближения, первый вход двадцать второго логического элемента И представляет четвертый вход блок обработки ситуаций сближения, выходы девятнадцатого, двадцатого, двадцать первого и двадцать второго логических элементов И соединены соответственно с первым, вторым, третьим и четвертым входами седьмого логического элемента ИЛИ, выход которого представляет выход блока обработки ситуаций сближения.
| СПОСОБ ОБЕСПЕЧЕНИЯ АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ ДВИЖЕНИИ В КОЛОННЕ | 2007 |
|
RU2388057C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2361750C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ И ПЕШЕХОДОВ НА ДОРОГАХ | 2013 |
|
RU2540816C1 |
| СИСТЕМА И ПРОГРАММА ПРОВОДКИ ПО МАРШРУТУ | 2007 |
|
RU2400710C1 |

