Изобретение относится к области систем ориентации.
В настоящее время в мировой практике для ориентации незрячих людей используется способ, основанный на технологии GPS навигации. Незрячий человек получает звуковые подсказки о своем местоположении и о направлении движения от системы GPS навигации. Известны разработки ряда зарубежных компаний в этой области. В частности, компанией Human Ware разработана система ориентации для слепых «Trekker 3», основанная на технологии GPS. С помощью звуковых подсказок, которые вырабатываются в системе GPS навигации, незрячий человек ориентируется в пространстве, см. сайты www.gisa.ru. и www.12v-clab.ru.
Недостатком этого способа является трудность восприятия незрячим человеком звуковых подсказок во время движения, в частности выражающаяся в том, что необходимо отсчитывать в уме количество шагов, которые задаются подсказкой. Это вынуждает незрячего человека во время движения постоянно находиться в сконцентрированном состоянии для правильного восприятия и реализации звуковых подсказок, что приводит к усталости и совершению ошибок.
Другим способом ориентации незрячих людей является общеизвестный способ с использованием трости, который позволяет им преодолевать препятствия и двигаться по знакомым маршрутам. (См. www.rgbs.ru, www.skbs.ru, «Во славу белой трости», Журнал «Наша жизнь», 2005, №11).
Но этот способ не дает возможности слепому человеку ориентироваться в незнакомой обстановке.
Обычно спутниковая система GPS навигации и трость совместно используются для ориентации незрячего человека в пространстве.
В качестве прототипа предлагаемого изобретения выбраны оба эти способа.
Целью настоящего изобретения является создание способа ориентации, обеспечивающего незрячему человеку комфортное передвижение по любым незнакомым маршрутам с помощью технологии GPS навигации и устройства для его реализации.
Согласно изобретению, эта цель достигается тем, что на нижнем конце трости устанавливают колесо, катят трость на колесе перед собой, вырабатывают сигнал управления ориентацией колеса по информации от системы спутниковой навигации GPS, управляют этим сигналом разворотами колеса и следуют за тростью в направлении ее движения.
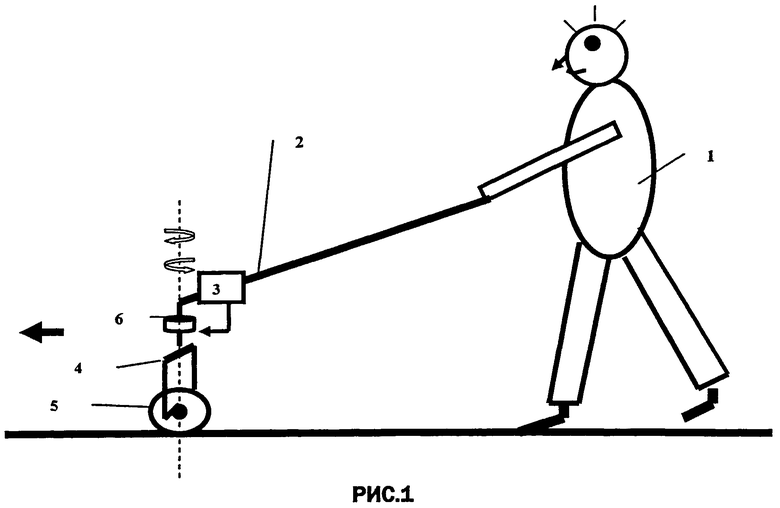
Схема устройства для реализации способа приведена на рис.1-3.
На рис.1-3 обозначено:
1 - незрячий человек;
2 - трость;
3 - GPS приемник;
4 - вилка;
5 - колесо;
6 - привод разворота вилки;
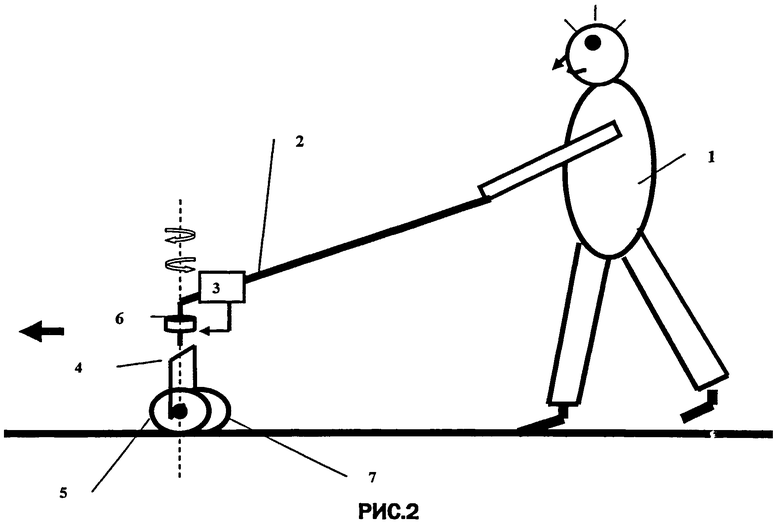
7 - второе колесо;
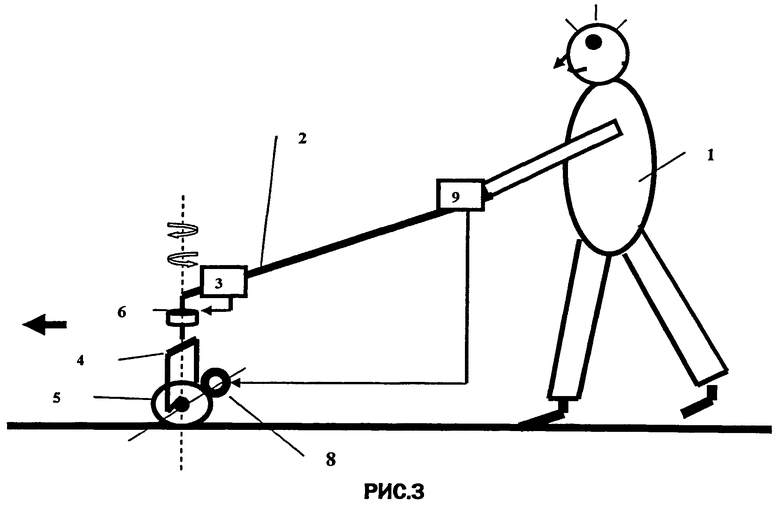
8 - привод тяги колеса;
9 - блок регулирования скорости колеса.
Сущность способа заключается в следующем.
Для того чтобы трость указывала незрячему человеку правильное направление движения в пространстве необходимо обеспечить передвижение самой трости в требуемом направлении.
Для этого, на трости устанавливают привод разворота вилки колеса, непрерывно измеряют GPS приемником фактическое текущее местоположение незрячего человека и сравнивают его на цифровой карте GPS приемника с требуемым маршрутом движения, который заранее введен в цифровую карту. Сигнал рассогласования текущего и заданного местоположения подают на привод разворота вилки и разворачивают колесо в требуемом направлении. При движении оно будет перемещаться по заданному маршруту.
За колесом будет перемещаться и трость, а за ней незрячий человек, который ее катит.
Таким образом, управляя от GPS приемника разворотами вилки колеса, закрепленного на трости, обеспечивают ее движение по заданному маршруту, что позволит незрячему человеку, толкающему трость достаточно легко ориентироваться в незнакомых областях пространства.
На рис.1 изображен незрячий человек 1, который держит в руках трость 2. На трости 2 закреплен GPS приемник 3. На конце трости 2 установлена вилка 4, в которой закреплено колесо 5. На оси вращения вилки 4 установлен привод разворота вилки 6.
На рис.2 показано устройство, в состав которого введено второе колесо 7, идентичное первому колесу 5 и установленное на одной оси вращения с первым колесом.
На рис.3 показано устройство, в состав которого введен привод тяги колеса 8 и соединенный с ним и установленный на ручке трости 2 блок регулирования скорости колеса 9.
Работа устройства, изображенного на рис.1, происходит следующим образом.
В исходной точке незрячий человек 1 вводит в GPS приемник 3 конечную точку своего маршрута. В настоящее время разработаны устройства ввода данных для незрячих людей в GPS приемник. GPS приемник 3 прокладывает маршрут движения незрячего человека 1 в заданную точку. После этого незрячий человек начинает движение, толкая перед собой трость 2, на конце которой установлена вилка 4 с колесом 5. В процессе движения GPS приемник 3 определяет фактические текущие координаты - широту и долготу местоположения незрячего человека 1 и направление его движения и вычисляет рассогласование текущих координат и заданного маршрута, который проложил GPS приемник. Сигнал рассогласования Δ поступает на привод разворота вилки 6, в результате чего вилка 6 разворачивает колесо 5 и выводит трость, а за ней и толкающего ее человека на заданную траекторию движения. Таким образом, любое отклонение от траектории движения будет скомпенсировано поворотом вилки 4 с колесом 5. При этом, незрячий человек не получает никаких указаний о направлении движения, а просто следует за колесом 5, как за поводырем.
В устройстве, изображенном на рис.2, второе колесо 7 введено для обеспечения большей устойчивости трости 2 и более стабильного удержания заданного направления при движении за счет повышения сцепления колес с дорогой. При движении незрячего человека 1 по заданному маршруту оба колеса 5 и 7 синхронно разворачиваются в требуемом направлении при развороте вилки 4 приводом разворота вилки 6.
В устройстве, изображенном на рис.3, незрячий человек выбирает требуемый маршрут движения, затем с помощью блока регулирования скорости 9 устанавливает требуемую скорость движения и включает привод тяги колеса 8. После этого устройство начнет движение по заданному маршруту. Незрячий человек 1, держась за верхний конец трости 2, будет передвигаться вслед за ней в требуемую точку назначения.
В предлагаемом устройстве ориентации незрячего человека, сочетающем GPS приемник и автоматически управляемое направляющее колесо упрощено и сделано более понятным для незрячего человека взаимодействие с GPS приемником. В данном случае GPS приемник реально выступает как поводырь, задавая тактильным способом направление движения незрячего человека по заданному маршруту.
Возможность технической реализации предлагаемого способа и устройства ориентации незрячего человека обеспечивается следующими факторами:
1. В настоящее время уже разработаны и используются незрячими людьми GPS приемники с использованием точных цифровых карт местности. Точность способа при использовании дифференциального режима работы системы GPS приемника может быть не хуже 1-2 метров.
2. Электромеханическая часть устройства может быть выполнена на существующих малогабаритных шаговых двигателях.
Расчеты показывают, что масса трости вместе с электроникой может быть не более 1,5-2 кг.
Предложенные способ и устройство могут быть положены в основу построения ряда устройств ориентации для незрячих людей. Они позволяют реализовать легко понимаемый незрячим человеком интерфейс связи с системой ориентации.
В данном способе и устройствах может также использоваться отечественная спутниковая система ГЛОНАС.
В связи с изложенным автор просит выдать патент на изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ориентации в пространстве людей с нарушением зрительных функций с помощью трости с тактильным экраном-оболочкой | 2019 |
|
RU2727885C1 |
| ЭЛЕКТРОННЫЙ ПОВОДЫРЬ ДЛЯ СЛЕПЫХ | 2006 |
|
RU2342108C2 |
| СПОСОБ ОРИЕНТАЦИИ, НАВИГАЦИИ И ИНФОРМАЦИИ В ПРОСТРАНСТВЕ ЛЮДЕЙ С НАРУШЕНИЕМ ЗРИТЕЛЬНЫХ ФУНКЦИЙ И СИСТЕМА ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2503436C1 |
| СПОСОБ И СИСТЕМА ТОЧНОЙ ЛОКАЛИЗАЦИИ СЛАБОВИДЯЩЕГО ИЛИ СЛЕПОГО ЧЕЛОВЕКА | 2017 |
|
RU2681346C2 |
| Способ ориентирования пользователя с применением спутниковой системы навигации, без звуковых оповещений и визуального контроля продвижения по карте маршрута, и устройство для осуществления способа | 2016 |
|
RU2638127C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ОРИЕНТИРОВАНИЯ ИНВАЛИДОВ ПО ЗРЕНИЮ В ЗАМКНУТОМ И ОТКРЫТОМ ПРОСТРАНСТВАХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2737914C2 |
| СИСТЕМА ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ЛЮДЕЙ С НАРУШЕНИЕМ ЗРИТЕЛЬНЫХ ФУНКЦИЙ | 2005 |
|
RU2299052C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2272255C1 |
Изобретение относится к области систем ориентации и может быть использовано в системах ориентации незрячих и слабовидящих людей. Способ заключается в том, что на трости незрячего человека устанавливают колесо с вилкой и GPS приемник, в котором задают координаты маршрута движения незрячего человека, вырабатывают координаты его текущего положения, определяют сигнал рассогласования координат текущего и заданного положения и катят перед собой трость. Кроме того на трости устанавливают привод разворота вилки и блок управления приводом разворота вилки, подают сигнал рассогласования координат текущего положения незрячего человека и заданного маршрута его движения на блок управления приводом разворота вилки и следуют за тростью в направлении ее движения. Устройство состоит из трости с вилкой и колесом, на которой установлен GPS приемник, а также снабжено приводом разворотов вилки. Выход GPS приемника соединен со входом привода разворотов вилки. Использование изобретения позволяет упростить ориентирование незрячего человека. 2 н. и 2 з.п. ф-лы, 3 ил.
1. Способ ориентации незрячего человека, заключающийся в том, что на его трости устанавливают колесо с вилкой и GPS-приемник, в котором задают координаты маршрута движения незрячего человека, вырабатывают координаты его текущего положения, определяют сигнал рассогласования координат текущего и заданного положений и катят перед собой трость, отличающийся тем, что на трости устанавливают привод разворота вилки и блок управления приводом разворота вилки, подают сигнал рассогласования координат текущего положения незрячего человека и заданного маршрута его движения на блок управления приводом разворота вилки и следуют за тростью в направлении ее движения.
2. Устройство для реализации способа по п.1, содержащее трость с вилкой и колесом, на которой установлен GPS-приемник, отличающееся тем, что в состав устройства введен привод разворотов вилки, при этом выход GPS-приемника соединен со входом привода разворотов вилки.
3. Устройство по п.2, отличающееся тем, что в него введено второе колесо, идентичное первому и установленное на одной оси вращения с первым колесом.
4. Устройство по п.2, отличающееся тем, что в его состав введен электрический привод колеса и соединенный с ним блок регулирования скорости колеса, установленный на ручке трости.
| US 2008251110 A1, 16.10.2008 | |||
| CN 201139688 Y, 29.10.2008 | |||
| CN 101483806 A, 15.07.2009 | |||
| US 2009032590 A1, 05.02.2009 | |||
| JP 9328725 A, 22.12.1997 | |||
| KR 20070104817 A, 29.10.2007 | |||
| US 6502032 B1, 31.12.2002 | |||
| US 2007018890 A1, 25.01.2007 | |||
| Трость | 1981 |
|
SU1088699A1 |
| ТРОСТЬ ДЛЯ ИНВАЛИДА ПО ЗРЕНИЮ | 2005 |
|
RU2280429C1 |
| Регулировочный автотрансформатор | 1949 |
|
SU89221A1 |

