Предлагаемое устройство относится к области контрольно-измерительной техники, в частности к радиолокационным методам и средствам неразрушающего контроля, позволяющим дистанционно, например с летательного аппарата, осуществлять поиск траектории прокладки трасс действующих магистральных подземных трубопроводящих коммуникаций (нефтегазопроводы, газопроводы, оптоволоконные и металлические кабели) из металлических и неметаллических материалов, определять их поперечный размер и глубину залегания трасс в грунте, а также обнаруживать местоположение утечек нефти и газа из магистральных подземных трубопроводов.
Известны мобильные георадары для дистанционного определения траектории прокладки трассы нефтегазопровода и глубины его залегания в грунте (авт. свид. СССР №№1.287.680, 1.810.859; патенты РФ №№2.046.378, 2.119.680, 2.202.812, 2.206.106, 2.207.588, 2.256.941; патенты США №№4.905.008, 6.087.883, 6.252.588; патент WO №01/38.902 Дикарев В.И. и др. Вода, нефть, газ и трубы в нашей жизни. СПб, 2005 и другие).
Из известных устройств наиболее близким к предлагаемому является «Мобильный георадар для дистанционного поиска местоположения подземных магистральных коммуникаций и определения их поперечного размера и глубины залегания в грунте» (патент РФ №2.256.941, G01V 3/17, 2004), который и выбран в качестве прототипа.
При этом антенны георадара выполнены в виде коллимирующих решеток, шарнирно закрепленных снаружи, например на днище фюзеляжа летательного аппарата с возможностью синхронного качания каждой антенны в плоскости поперечного сечения фюзеляжа на угол 1-5°. Антенны сфокусированы в сторону поверхности земли. Длительность зондирующих электромагнитных импульсов фиксирована в пределах диапазона 10-0,2 нс.
Однако известный мобильный георадар обладает сравнительно низкой разрешающей способностью по азимуту.
Технической задачей изобретения является повышение разрешающей способности по азимуту путем синтезирования апертуры принимающей антенны.
Поставленная задача решается тем, что мобильный георадар для дистанционного поиска местоположения подземных магистральных коммуникаций и определения их поперечного размера и глубины залегания в грунте, содержащий, в соответствии с ближайшим аналогом, летательный аппарат, последовательно включенные высокочастотный генератор импульсов и передающую антенну высокочастотных электромагнитных импульсов, второй вход которого соединен с первым выходом блока управления антеннами, последовательно включенные принимающую антенну высокочастотных электромагнитных импульсов, второй вход которой соединен со вторым выходом блока управления антеннами, и приемник, последовательно включенные процессор с программным обеспечением и монитор, при этом антенны выполнены в виде коллимирующих решеток, шарнирно закрепленных снаружи на днище фюзеляжа летательного аппарата с возможностью синхронного качания каждой антенны в плоскости поперечного сечения фюзеляжа на угол 1-5° относительно вертикали и независимо от крена летательного аппарата и сфокусированных в сторону поверхности земли, длительность зондирующих электромагнитных импульсов фиксирована и назначается в пределах диапазона 10-0,2 нс, а данные зависимости контрастности от электрофизических свойств фракций грунтов и материалов трубопроводных коммуникаций введены в программное обеспечение процессора, отличается от ближайшего аналога тем, что он снабжен синхронизатором, многоотводной линией задержки и сумматором, обеспечивающими синтезирование апертуры принимающей антенны, причем входы управления блока управления антеннами, высокочастотного генератора импульсов и приемника соединены с соответствующими выходами синхронизатора, к выходу приемника последовательно подключены многоотводная линия задержки и сумматор, вход управления которого соединен с выходом приемника, а выход подключен к входу процессора с программным обеспечением, вход управления которого соединен с четвертым выходом синхронизатора.
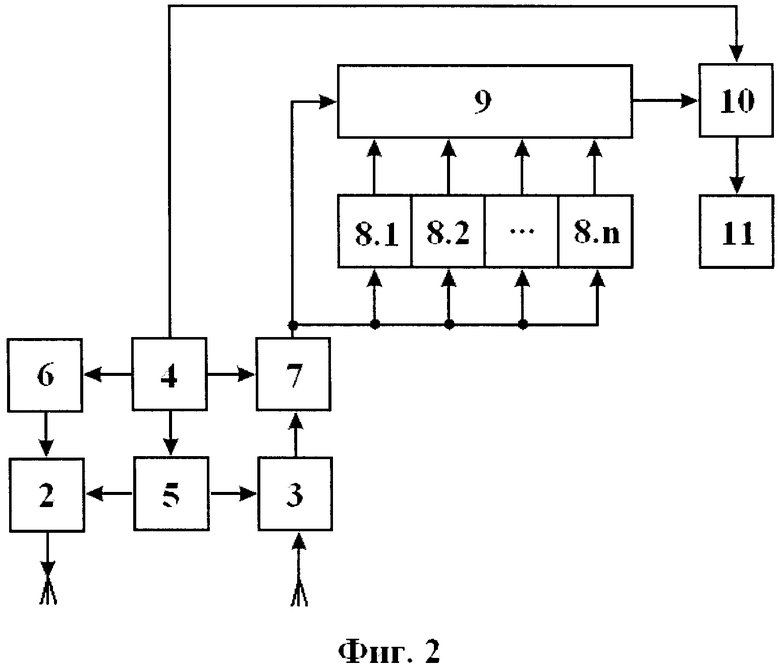
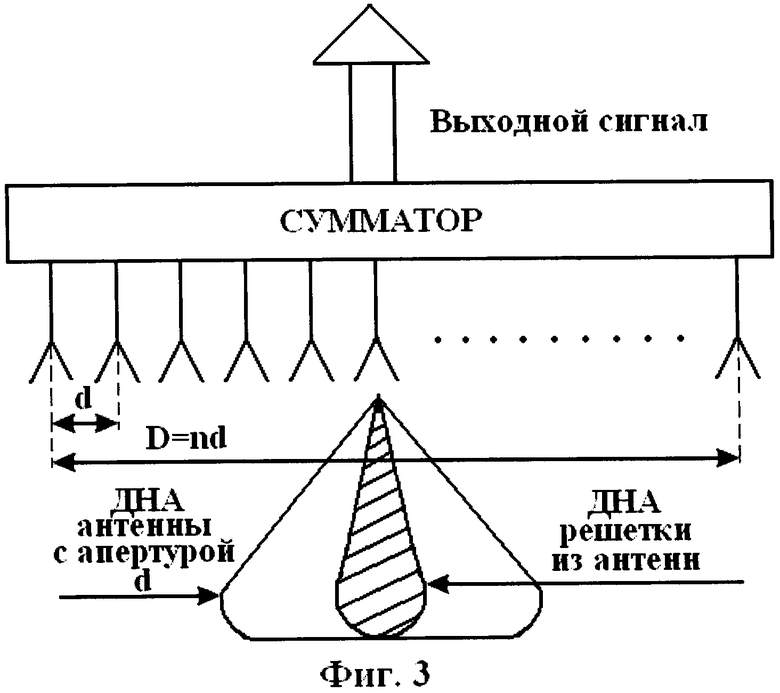
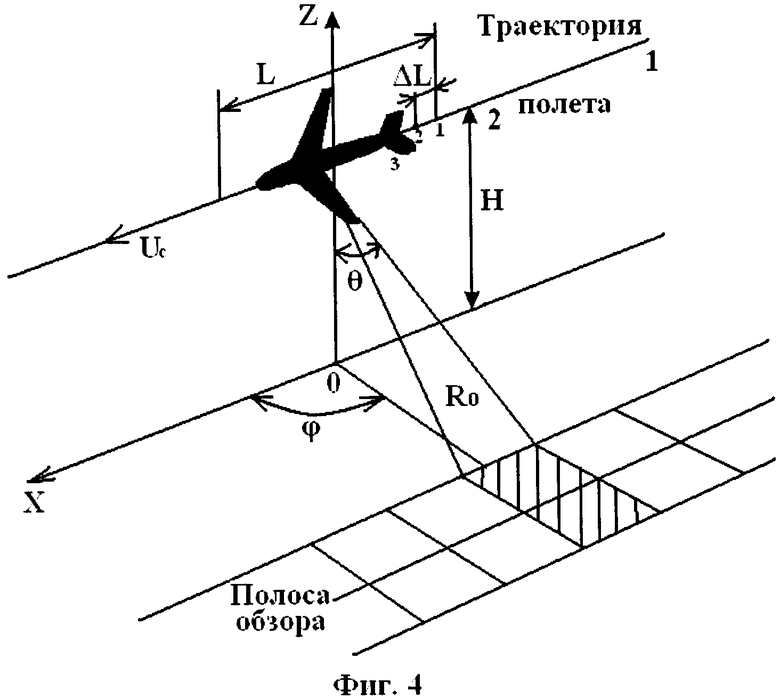
Топографо-геодезический фрагмент взаимного расположения мобильного георадара и подземной трассы магистрали показан на фиг.1. Структурная схема оборудования, размещенного на борту летательного аппарата, представлена на фиг.2. Принцип формирования синтезированной апертуры принимающей антенны 3 показан на фиг.3. Геометрическая схема бокового обзора РЛС с синтезированной апертурой изображена на фиг.4.
Мобильный георадар содержит летательный аппарат 1, передающую 2 и принимающую 3 антенны высокочастотных электромагнитных импульсов (фиг.1).
Оборудование, размещенное на борту летательного аппарата 1, содержит последовательно включенные синхронизатор 4, высокочастотный генератор 6 импульсов и передающую антенну 2, вход управления которого соединен с первым выходом блока 5 управления антеннами, последовательно включенные принимающую антенну 3, вход управления которого соединен со вторым выходом блока 5 управления антеннами, вход управления которого соединен с третьим выходом синхронизатора 4, многоотводная линия 8.i задержки (i=1, …, n), сумматор 9, вход управления которого соединен с выходом приемника, процессор 10 с программным обеспечением, вход управления которого соединен с четвертным выходом синхронизатора 4, и монитор 11 (фиг.2).
Антенны 2 и 3 выполнены в виде коллимирующих решеток, шарнирно закрепленных снаружи на днище фюзеляжа летательного аппарата с возможностью синхронного качания каждой антенны 2, 3 в плоскости поперечного сечения фюзеляжа на угол 1…5° относительно вертикали и независимо от крена летательного аппарата и сфокусированных в сторону поверхности земли. Коллимирование антенных решеток позволяет сформировать необходимую апертуру излучаемого и отраженного электромагнитного пучка.
Длительность зондирующих электромагнитных импульсов фиксирована, величина которой назначается в пределах диапазона 10…0,2 нс и выбирается в зависимости от реальной геологии и типа фракций насыпного грунта, материала трубопровода и базы данных зависимости контрастности от электрофизических свойств фракций насыпного грунта, внесенной в память процессора. Максимальное количество точек в каждой реализации - 2048, минимальное время между выборками - 2,5 нс, максимальное - 1 нс.
Необходимо отметить, что фракции засыпных грунтов в канал, по которому проложена трасса, как правило, малогабаритные (песок, торф, легкие суглинки, супеси) по сравнению с поперечными размерами протяженных трубопроводов, а крупные фракции типа камней, булыжников при засыпке канала не используют.
Высокочастотный генератор 6 предназначен для излучения коротких высокочастотных импульсов в грунт земли через воздушное пространство посредством передающей антенны 2. Отраженные высокочастотные импульсы от поверхности земли и границ раздела фракций и других предметов, находящихся в грунте, принимаются антенной 3.
Георадар дает пространственную информацию о геологических характеристиках просвечиваемой среды, в частности о наличии в грунте различных фракций, отличающихся друг от друга физико-электрическими свойствами, геометрической формой, глубиной залегания от поверхности грунта, о виде и состоянии грунтов в разрезе, что отражается на параметрах электромагнитных импульсов (скорости V распространения радиоволн в грунте и коэффициенте α поглощения).
Используемый в георадаре радиолокационный метод контроля основан на изучении параметров излучаемых и отраженных коротких высокочастотных импульсов, т.е. по времени t запаздывании между зондирующими и отраженными импульсами, скорости V распространения радиоволн в грунте [см/нс]:
V=С/εотн
и глубине залегания отражающего импульса:
h=(Vt)/2,
где С - скорость света в вакууме, равная 30 см/нс;
εотн - комплексная относительная диэлектрическая проницаемость, рассчитывается из выражения
εoтн=ε∗/ε0,
где ε∗ - диэлектрическая проницаемость исследуемой среды;
ε0 - диэлектрическая проницаемость в вакууме.
При изучении характера распространения электромагнитных волн в грунте для случаев, когда длина волны существенно меньше глубины до отраженных границ раздела фракций в грунте, что характерно для практики, можно с известной степенью приближения физику взаимодействия электрического поля со средой моделировать на схеме конденсатора. Так как значение εотн зависит, в основном, от количественного содержания влаги и минерального состава грунта, то относительная диэлектрическая проницаемость εотн показывает, во сколько раз увеличивается емкость конденсатора, если вместо воздуха в него поместить данный грунт.
По степени поглощения электромагнитных волн грунты подразделяются на три группы:
- слабо поглощающие - незаселенные грунты, стекло, пески, торф (α=0,3…7,0 дБ/м);
- промежуточные - легкие суглинки, супеси (α=7,0…14 дБ/м);
- сильно поглощающие - глины, тяжелые суглинки, металлы (α=14…26 и более дБ/м).
Отсюда следует, что с увеличением ослабления электромагнитного сигнала в грунте глубина исследования радиолокационным методом неразрушающего контроля изменяется от 25…30 м для песчаных и до 3…8 м - для глинистых пород. Но и этого минимального предела глубины (глинистых пород) достаточно для достоверного контроля параметров трубопровода, так как глубина залегания трубопроводных коммуникаций в грунте на практике не превышает 1,5…2 м.
Процессор георадара предназначен для обработки информационных параметров поступающих отраженных сигналов, их сопоставления с базой данных, введенных в программное обеспечение. Программное обеспечение состоит из двух частей: первичной (регистрация сигнала, его накопление и создание файлов) и вторичной обработки информации. Обеспечение вторичной обработки реализовано в виде пакета "Geo-data for Windows", предоставляющего оператору следующие возможности:
- чтение данных, запоминание и индикацию в виде среза грунта или отдельных реализаций;
- выбор цветной гаммы в изображении среза грунта;
- фильтрацию данных фильтрами низких и высоких частот;
- преобразование данных (масштабирование, интерполяция, децимация и вычитание), синтез апертуры, преобразование Гильберта;
- протоколирование преобразований за сеанс работы;
- печать данных.
Поскольку данные зависимости контрастности от электрофизических свойств применяемых для засыпки каналов под трубопровод грунтов занесены в память процессора, то при сопоставлении информационных данных с базой данных имеется возможность оператору улучшать качество изображения на экране монитора путем рационального выбора длительности электромагнитного сигнала, зондирующего грунт.
Видеомонитор предназначен для визуального наблюдения за текущей информацией, исходящей из процессора.
В качестве летательного аппарата могут быть самолет, вертолет, дельтоплан, зонд и др.
Принцип работы РЛС с синтезированной апертурой можно пояснить следующим образом.
Траекторию летательного аппарата (ЛА), будь то самолет, вертолет или ИСЗ, на коротких интервалах времени (порядка нескольких секунд) можно считать прямолинейной, а скорость движения по траектории - постоянной. Соответственно равномерно и прямолинейно движется бортовая принимающая антенна ЗЛА.
Диаграмма направленности антенной решетки (ДНА) формируется в результате когерентного сложения колебаний, принимаемых отдельными ее элементами. Так, если антенная система состоит из n рядом расположенных одинаковых антенн размером d (линейная решетка) и сигналы, принимаемые каждой антенной, когерентно суммируются, антенная решетка имеет такую же узкую диаграмму направленности, как и антенна размером D=dn (фиг.3).
В РЛС синтезированной апертурой применяется небольшая приемная антенна 3, широкая диаграмма направленности (ДНА) которой направлена перпендикулярно траектории, т.е. осуществляет боковой обзор пространства. При полете самолета приемная антенна 3 последовательно занимает в пространстве различные положения 1, 2, 3 и т.д. (фиг, 4) на прямой линии (траектории полета ЛА), тем самым формируя искусственную (синтезированную) антенную решетку.
Задерживая сигналы на время  где Vc - скорость ЛА, последовательно принимаемые антенной 3 в каждой точке траектории, и когерентно их суммируя, можно получить узкую диаграмму направленности искусственно сформированной антенной решетки. Размер решетки, т.е. размер синтезированной апертуры приемной антенны 3, равен длине L участка траектории, на котором когерентно суммируются сигналы, принятые в разные моменты времени в разных последовательных точках траектории.
где Vc - скорость ЛА, последовательно принимаемые антенной 3 в каждой точке траектории, и когерентно их суммируя, можно получить узкую диаграмму направленности искусственно сформированной антенной решетки. Размер решетки, т.е. размер синтезированной апертуры приемной антенны 3, равен длине L участка траектории, на котором когерентно суммируются сигналы, принятые в разные моменты времени в разных последовательных точках траектории.
Максимально возможная (потенциальная) угловая разрешающая способность РЛС по азимуту определяется шириной диаграммы направленности синтезированной антенны
 ,
,
где L - размер участка траектории ЛА, на котором обрабатываются принимаемые сигналы и синтезируется апертура. При боковом обзоре радиолокационная информация формируется в полосе местности, границы которой располагаются параллельно траектории ЛА (фиг.4).
При движении РЛС по траектории частота f0 сигнала, отраженного магистралью, отличается от частоты зондирующего сигнала fз на значение доплеровского сигнала
 ,
,
где θ - угол между направлением на объект и боковым направлением.
Работа георадара заключается в следующем.
При взлете летательного аппарата 1 включают в бортовую электрическую сеть блоки георадара, а при выходе аппарата 1 на предполагаемый топографический маршрут трассы начинают сканировать поверхность земли антеннами 2 и 3, синтезировать апертуру принимающей антенны 3.
Синхронизатор 4 предназначен для формирования запускающих, управляющих и бланкирующих видеоимпульсов. Он обеспечивает координацию работы всех функциональных блоков георадара во времени. Импульсы запуска генератора 6 импульсов, поступающие из синхронизатора 4, определяют моменты излучения зондирующих импульсов. Зондирующие поверхность земли короткие электромагнитные импульсы, проникая через толщу грунта, отражаются обратно от поверхности земли, границ фракций среды грунта и искусственно вложенного в грунт протяженного трубопровода и через принимающую антенну 3 и приемник 7 поступают на сумматор 9 непосредственно и через n-отводную линию задержки 8.i (i=1, …, n). Последние формируют синтезированную апертуру принимающей антенны 3 с узкой диаграммой направленности. Амплитуда принимаемых радиоимпульсов изменяется за время облучения поверхности земли в соответствии с диаграммой направленности реальной антенны по азимуту с синтезированной апертурой. Фаза радиоимпульсов изменяется в соответствии с доплеровским смещением частоты, определяемым путевой скоростью ЛА и текущим азимутом магистрали. По отраженным сигналам формируется картина профиля грунта с массивным протяженным объектом. Границы раздела фракций грунта и трубопровода отображаются на экране видеомонитора 11 в виде ярко-темных линий, однородность среды - одним цветом ровной тональности, степень которой зависит от электрофизических свойств структуры грунта. Чем выше коэффициент поглощения, тем темнее тональность. По разности контрастности участков, их габаритам и резким ярко-темным границам, высвечиваемым на экране монитора 11, судят о наличии трубопровода и его поперечном размере, а по времени прихода соответствующих отраженных сигналов от поверхности грунта земли и границы раздела трубопровода с фракциями грунта до антенны 3 судят о глубине залегания трубопровода в грунте.
Таким образом, предлагаемый мобильный георадар по сравнению с прототипом обеспечивает повышение разрешающей способности по азимуту. Это достигается за счет синтезирования апертуры принимающей антенны.
Считается, что с использованием метода синтезирования можно увеличить разрешающую способность мобильного георадара по азимуту в 100 раз и более по сравнению с разрешающей способностью панорамных РЛС и прототипа. По потенциальным характеристикам разрешающей способности предлагаемый мобильный георадар с синтезированной апертурой принимающей антенны приближается к разрешению, характерному для оптических приборов.
Размер синтезируемой антенны, т.е. участок траектории, на котором обрабатываются сигналы, можно изменять так, чтобы ширина синтезированной диаграммы направленности уменьшалась пропорционально увеличению дальности. Этот эффект позволяет получать радиолокационные изображения с постоянной разрешающей способностью независимо от удаленности просматриваемого участка местности.
Положительным результатом предлагаемого мобильного георадара являются расширенные функциональные возможности (одновременный поиск трассы, определение ее поперечного размера и глубины залегания в грунте), высокая помехозащищенность и качество изображения на видеомониторе вследствие выбранных параметров зондирующих импульсов, синхронизации сканирования антенн и работы всех функциональных блоков георадара во времени, наличия базы данных, хранящейся в памяти процессора, зависимости контрастности от электрофизических свойств фракций грунтов и высокая разрешающая способность по азимуту за счет формирования искусственной (синтезированной) антенной решетки. С помощью последней может быть построена подробная и точная карта просвечиваемой среды. Качество такой радиолокационной съемки сравнимо с качеством снимков в оптическом диапазоне. Но проведению радиолокационной съемки практически не мешают погодные условия и условия освещенности, которые существенно влияют на использование оптики.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ ГЕОРАДАР ДЛЯ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2004 |
|
RU2256941C1 |
| Способ зондирования лунного грунта | 2017 |
|
RU2667695C1 |
| Способ выполнения изоляционного покрытия подземного нефтепровода | 2021 |
|
RU2778210C1 |
| Способ обнаружения границы локального подземного торфяного пожара и робот для проведения разведки подземных торфяных пожаров | 2016 |
|
RU2625602C1 |
| Способ обнаружения границы локального подземного торфяного пожара и способ доставки на поверхность торфяника портативного георадара и приёма данных зондирования в режиме реального времени | 2016 |
|
RU2647221C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2439519C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2628872C2 |
| СПОСОБ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2017 |
|
RU2656287C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА УТЕЧКИ ЖИДКОСТИ ИЛИ ГАЗА ИЗ ТРУБОПРОВОДА, НАХОДЯЩЕГОСЯ В ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2411476C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
Изобретение относится к радиолокационным методам и средствам обнаружения подповерхностных объектов, позволящим осуществлять поиск траектории прокладки трасс подземных трубопроводящих коммуникаций, определять их поперечный размер и глубину залегания трасс в грунте, а также обнаруживать местоположение утечек нефти и газа из магистральных подземных трубопроводов. Технический результат: повышение разрешающей способности по азимуту путем синтезирования апертуры принимающей антенны. Сущность: мобильный георадар содержит летательный аппарат 1, передающую 2, принимающую 3 антенну, синхронизатор, блок управления антеннами, высокочастотный генератор импульсов, приемник, многоотводную линию задержки, сумматор, процессор с программным обеспечением и монитор. 4 ил.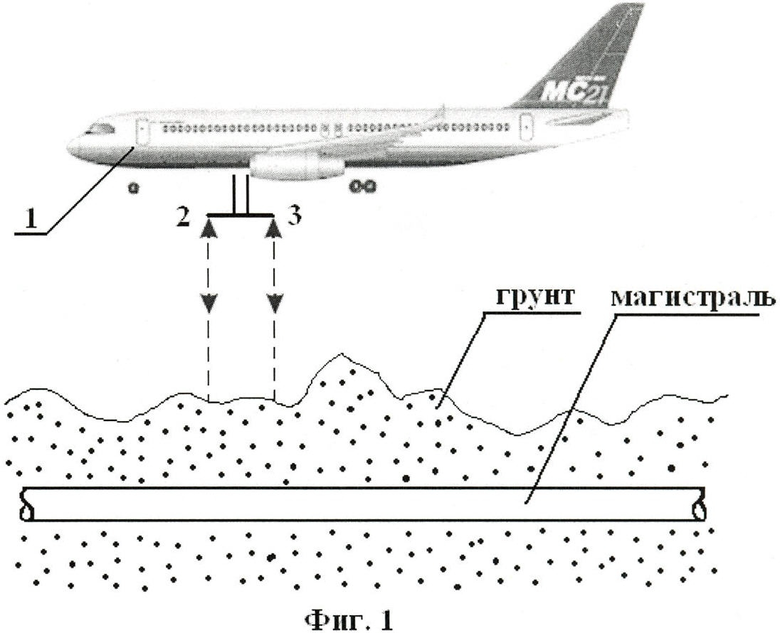
Мобильный георадар для дистанционного поиска местоположения подземных магистральных коммуникаций и определения их поперечного размера и глубины залегания в грунте, содержащий летательный аппарат, последовательно включенные высокочастотный генератор импульсов и передающую антенну высокочастотных электромагнитных импульсов, второй вход которого соединен с первым выходом блока управления антеннами, последовательно включенные принимающую антенну высокочастотных электромагнитных импульсов, второй вход которой соединен со вторым выходом блока управления антеннами, и приемник, последовательно включенные процессор с программным обеспечением и монитор, при этом антенны выполнены в виде коллимирующих решеток, шарнирно закрепленных снаружи на днище фюзеляжа летательного аппарата с возможностью синхронного качания каждой антенны в плоскости поперечного сечения фюзеляжа на угол 1-5° относительно вертикали и независимо от крена летательного аппарата и сфокусированных в сторону поверхности земли, длительность зондирующих электромагнитных импульсов фиксирована и назначается в пределах диапазона 10-0,2 нс, а данные зависимости контрастности от электрофизических свойств фракций грунтов и материалов трубопроводных коммуникаций введены в программное обеспечение процессора, отличающийся тем, что он снабжен синхронизатором, многоотводной линией задержки и сумматором, обеспечивающими синтезирование апертуры принимающей антенны, причем входы управления блока управления антеннами, высокочастотного генератора импульсов и приемника соединены с соответствующими выходами синхронизатора, к выходу приемника последовательно подключены многоотводная линия задержки и сумматор, вход управления которого соединен с выходом приемника, а выход подключен к входу процессора с программным обеспечением, вход управления которого соединен с четвертым выходом синхронизатора.
| МОБИЛЬНЫЙ ГЕОРАДАР ДЛЯ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2004 |
|
RU2256941C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
| Фотоэлемент | 1929 |
|
SU22826A1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2001 |
|
RU2207588C2 |
| Способ определения модуля упругости железобетонных изделий | 1982 |
|
SU1067398A1 |
| EP 1965223 A1, 03.09.2008 | |||
| US 6091354 A, 18.07.2000. | |||

