ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к беспроводной связи. В частности, изобретение относится к настройке коэффициентов отвода эквалайзера и оценкам отношения уровня сигнала к совокупному уровню помех и шумов в приемнике.
УРОВЕНЬ ТЕХНИКИ
Предполагается, что современная система связи предоставляет надежную передачу данных для ряда приложений, например приложений передачи речи и данных. В контексте многоточечной связи известные системы связи основываются на коллективном доступе с разделением по частоте (FDMA), коллективном доступе с временным разделением (TDMA), коллективном доступе с кодовым разделением (CDMA) и, возможно, других схемах связи с коллективным доступом.
Система CDMA может быть спроектирована для поддержки одного или нескольких стандартов CDMA, например (1) "TIA/EIA-95 Mobile Station-Base Station Compatibility Standard for Dual-Mode Wideband Spread Spectrum Cellular System" (этот стандарт с его расширенными редакциями A и B может называться "стандартом IS-95"), (2) "TIA/EIA-98-C Recommended Minimum Standard for Dual-Mode Wideband Spread Spectrum Cellular Mobile Station" ("стандарт IS-98"), (3) стандарт, спонсируемый консорциумом с названием "Проект Партнерства Третьего Поколения" (3GPP) и реализованный в наборе документов, известном как "стандарт W-CDMA", (4) стандарт, спонсируемый консорциумом с названием "Второй Проект Партнерства Третьего Поколения" (3GPP2) и реализованный в наборе документов, включающем "TR-45.5 Physical Layer Standard for cdma2000 Spread Spectrum Systems", "C.S0005-A Upper Layer (Layer 3) Signaling Standard for cdma2000 Spread Spectrum Systems" и "TIA/EIA/IS-856 cdma2000 High Rate Packet Data Air Interface Specification" (вместе "стандарт cdma2000"), (5) стандарт 1xEV-DO и (6) некоторые другие стандарты.
Беспроводной терминал доступа, например терминал в беспроводной системе CDMA, может принимать передачи данных от одной или нескольких базовых станций по прямой линии связи или линиям связи. Сигнал, переданный конкретной базовой станцией, может достигать терминала по нескольким маршрутам распространения. Принятый на терминале сигнал может включать в себя один или несколько экземпляров сигнала (также известных как компоненты многолучевого распространения), переданного базовой станцией. Слово "многолучевой" относится к наличию нескольких маршрутов распространения, по которым сигнал перемещается от передатчика (например, базовой станции) к приемнику (например, терминалу доступа). Каждый из многолучевых компонентов также подвергается меняющейся характеристике физического канала, шуму и помехам. Терминал может применять эквалайзер для компенсации характеристики канала и многолучевого искажения. Эквалайзер может быть фильтром коррекции с некоторым количеством элементов задержки и коэффициентов умножения в отводах, соответствующих элементам задержки. Некоторые методики коррекции и эквалайзеры описываются в принадлежащем тому же правообладателю патенте США № 7301990, озаглавленном "Equalization of Multiple Signals Received for Soft Handoff in Wireless Communication Systems"; и в принадлежащем тому же правообладателю патенте США № 6522683, озаглавленном "Method and Apparatus for Adaptive Linear Equalization for Walsh Covered Modulation".
Пилот-сигналы могут использоваться для оценки физического канала между передатчиком и приемником, например от базовой станции к терминалу доступа в системе CDMA. Пилот-сигнал является сигналом, несущим предопределенную последовательность данных, чтобы искажение пилот-сигнала могло быть отнесено к каналу передачи, и поэтому канал передачи может оцениваться из принятого пилот-сигнала.
Пилот-сигнал может передаваться с вполне определенными периодическими интервалами прямой линии связи. В некоторых системах CDMA, например, прямая линия связи задается в показателях кадров. Кадр может включать в себя шестнадцать временных интервалов. Каждый временной интервал может иметь длину в 2048 элементарных посылок, соответствующих длительности временного интервала в 1,67 миллисекунду и, следовательно, кадру с длительностью 26,67 миллисекунд. Каждый временной интервал может быть разделен на два временных полуинтервала с пакетом пилот-сигнала из 96 элементарных посылок, переданных в середине каждого временного полуинтервала. Оставшаяся часть каждого временного полуинтервала занята двумя переносящими трафик частями примерно по 400 элементарных посылок каждая и частями управления доступом к среде передачи (MAC).
С каждым пакетом пилот-сигнала эквалайзер регулируется («обучается»), и его коэффициенты отвода приспосабливаются на основе оценки, полученной с помощью пакета пилот-сигнала. Полученные таким образом коэффициенты затем используются для демодуляции частей трафика в каждой стороне пакета пилот-сигнала. Так как коэффициенты, полученные из регулировки на конкретном пакете пилот-сигнала, используются для демодуляции трафика, следующего во времени за пакетом пилот-сигнала, способ является антипричинным.
В быстро изменяющихся условиях канал может подвергаться существенному изменению между временем пакета пилот-сигнала и фактической передачей и приемом данных, особенно для данных, которые наиболее удалены во времени от пакета пилот-сигнала. Надлежащая регулировка эквалайзера важна для эффективности эквалайзера, а следовательно, для эффективности приемника. Поэтому в данной области техники существует потребность в устройстве, способах и изделиях, которые улучшают соответствие коэффициентов эквалайзера фактическим условиям в канале передачи во время передачи и приема данных. Также в данной области техники имеется потребность в приемниках с такими улучшенными эквалайзерами. В данной области техники существует еще одна потребность в системах беспроводной связи, которые применяют такие приемники.
Отношение уровня сигнала к совокупному уровню помех и шумов (SINR) для сигнала также измеряется во время пакетов пилот-сигнала и затем используется для масштабирования выходного сигнала эквалайзера перед подачей его в блок, который вычисляет логарифмическое отношение правдоподобия, и/или для другой обработки переданной информации. Следовательно, для приемника также важно получение хороших оценок SINR. Поэтому в данной области техники существует потребность в устройстве, способах и изделиях, которые улучшают оценки SINR фактических условий в канале передачи во время передачи и приема данных. Также в данной области техники имеется потребность в приемниках, которые используют такие улучшенные оценки SINR. В данной области техники существует еще одна потребность в системах беспроводной связи, которые применяют такие приемники.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Варианты осуществления, раскрытые в этом документе, могут удовлетворить одну или несколько вышеупомянутых потребностей путем предоставления устройства, способов и изделий для интерполирования коэффициентов эквалайзера и/или оценок SINR между пакетами пилот-сигналов. Системы, способы и изделия, описанные ниже, могут применяться в телекоммуникации, включая применения в сотовых терминалах доступа.
Описывается способ функционирования приемника в системе беспроводной связи. Способ включает в себя этап, на котором принимают кадр, включающий множество временных интервалов. Каждый временной интервал из множества временных интервалов имеет два временных полуинтервала, причем каждый временной полуинтервал включает в себя два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика. Множество временных интервалов включает в себя первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом. Первый временной полуинтервал содержит первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала. Второй временной полуинтервал содержит второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика. Способ также включает в себя этап, на котором разделяют первый и второй сегменты трафика на множество подсегментов. Множество подсегментов включает в себя первый подсегмент и второй подсегмент, следующий за первым подсегментом. Способ дополнительно включает в себя этап, на котором регулируют эквалайзер приемника на первом пакете пилот-сигнала, чтобы получить первое множество отрегулированных коэффициентов отвода, и этап, на котором регулируют эквалайзер приемника на втором пакете пилот-сигнала, чтобы получить второе множество отрегулированных коэффициентов отвода. Способ дополнительно включает в себя этап, на котором интерполируют между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить первый набор интерполированных коэффициентов отвода для первого подсегмента, и коррекцию первого подсегмента с использованием первого набора интерполированных коэффициентов отвода.
Другой способ функционирования приемника в системе беспроводной связи включает в себя этап, на котором принимают кадр с множеством временных интервалов, причем каждый временной интервал в множестве временных интервалов имеет два временных полуинтервала. Каждый из временных полуинтервалов содержит два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика. Множество временных интервалов включает в себя первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом. Первый временной полуинтервал включает в себя первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, а второй временной полуинтервал включает в себя второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика. Способ также включает в себя этап, на котором разделяют первый и второй сегменты трафика на множество подсегментов. Множество подсегментов содержит первый подсегмент и второй подсегмент, следующий за первым подсегментом. Способ дополнительно включает в себя этап, на котором измеряют отношение уровня сигнала к совокупному уровню помех и шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное SINR, и измерение отношения уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR. Способ дополнительно включает в себя этап, на котором интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента. Способ дополнительно включает в себя этап, на котором предоставляют пользователю, по меньшей мере, некоторые данные во множестве подсегментов.
Описывается беспроводной терминал. Беспроводной терминал включает в себя приемник, запоминающее устройство и контроллер, соединенный с приемником и запоминающим устройством. Контроллер выполнен с возможностью приема множества временных интервалов, причем каждый временной интервал в множестве временных интервалов включает в себя два временных полуинтервала. Каждый временной полуинтервал содержит два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика. Множество временных интервалов включает в себя первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом. Первый временной полуинтервал содержит первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала. Второй временной полуинтервал содержит второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика. Контроллер также выполнен с возможностью разделения первого и второго сегментов трафика на множество подсегментов. Множество подсегментов включает в себя первый подсегмент и второй подсегмент, следующий за первым подсегментом. Контроллер также выполнен с возможностью регулировки эквалайзера на первом пакете пилот-сигнала, чтобы получить первое множество отрегулированных коэффициентов отвода, и регулировки эквалайзера на втором пакете пилот-сигнала, чтобы получить второе множество отрегулированных коэффициентов отвода. Контроллер дополнительно выполнен с возможностью интерполирования между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить первый набор интерполированных коэффициентов отвода для первого подсегмента. Контроллер дополнительно выполнен с возможностью коррекции первого подсегмента с использованием эквалайзера с первым набором интерполированных коэффициентов отвода.
Описывается беспроводной терминал. Беспроводной терминал включает в себя приемник, запоминающее устройство и контроллер, соединенный с приемником и запоминающим устройством. Контроллер выполнен с возможностью приема множества временных интервалов, причем каждый временной интервал в множестве временных интервалов содержит два временных полуинтервала. Каждый временной полуинтервал включает в себя два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика. Множество временных интервалов включает в себя первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, без временного полуинтервала, разделяющего первый временной полуинтервал и второй временной полуинтервал. Первый временной полуинтервал включает в себя первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, а второй временной полуинтервал включает в себя второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика. Контроллер также выполнен с возможностью разделения первого и второго сегментов трафика на множество подсегментов. Множество подсегментов включает в себя первый подсегмент и второй подсегмент, следующий за первым подсегментом. Контроллер дополнительно выполнен с возможностью измерения отношения уровня сигнала к совокупному уровню помех и шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное SINR, и измерения отношения уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR. Контроллер дополнительно выполнен с возможностью интерполирования между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента. Контроллер дополнительно выполнен с возможностью предоставления пользователю, по меньшей мере, некоторых данных во множестве подсегментов.
Описывается беспроводной терминал. Беспроводной терминал включает в себя средство для приема беспроводного сигнала, средство для коррекции, средство для хранения данных и средство для обработки. Средство для обработки соединяется со средством для приема, средством для коррекции и средством для хранения. Средство для обработки выполнено с возможностью приема множества временных интервалов, причем каждый временной интервал в множестве временных интервалов содержит два временных полуинтервала. Каждый из временных полуинтервалов содержит два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика. Множество временных интервалов включает в себя первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, без временного полуинтервала, разделяющего первый временной полуинтервал и второй временной полуинтервал. Первый временной полуинтервал включает в себя первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, а второй временной полуинтервал включает в себя второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика. Контроллер также выполнен с возможностью разделения первого и второго сегментов трафика на множество подсегментов. Множество подсегментов включает в себя первый подсегмент и второй подсегмент, следующий за первым подсегментом. Контроллер дополнительно выполнен с возможностью регулировки средства для коррекции на первом пакете пилот-сигнала, чтобы получить первое множество отрегулированных коэффициентов отвода, и регулировки средства для коррекции на втором пакете пилот-сигнала, чтобы получить второе множество отрегулированных коэффициентов отвода. Контроллер дополнительно выполнен с возможностью интерполирования между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить первый набор интерполированных коэффициентов отвода для первого подсегмента. Контроллер дополнительно выполнен с возможностью коррекции первого подсегмента с использованием первого набора интерполированных коэффициентов отвода. Контроллер дополнительно выполнен с возможностью предоставления пользователю, по меньшей мере, некоторых данных во множестве подсегментов.
Описывается беспроводной терминал. Беспроводной терминал включает в себя средство для приема беспроводного сигнала, средство для коррекции, средство для хранения данных и средство для обработки. Средство для обработки соединяется со средством для приема, средством для коррекции и средством для хранения. Средство для обработки выполнено с возможностью приема множества временных интервалов, причем каждый временной интервал в множестве временных интервалов содержит два временных полуинтервала. Каждый из временных полуинтервалов содержит два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика. Множество временных интервалов включает в себя первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, без временных полуинтервалов, разделяющих первый временной полуинтервал и второй временной полуинтервал. Первый временной полуинтервал включает в себя первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала. Второй временной полуинтервал включает в себя второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика. Контроллер также выполнен с возможностью разделения первого и второго сегментов трафика на множество подсегментов. Множество подсегментов включает в себя первый подсегмент и второй подсегмент, следующий за первым подсегментом. Контроллер дополнительно выполнен с возможностью измерения отношения уровня сигнала к совокупному уровню помех и шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное SINR, и измерения отношения уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR. Контроллер дополнительно выполнен с возможностью интерполирования между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента. Контроллер дополнительно выполнен с возможностью предоставления пользователю, по меньшей мере, некоторых данных во множестве подсегментов.
Описывается машиночитаемый носитель. Носитель хранит команды. Когда команды выполняются, по меньшей мере, одним процессором беспроводного терминала доступа, они побуждают терминал доступа выполнять некоторое количество этапов. Этапы включают в себя прием множества временных интервалов, причем каждый временной интервал в множестве временных интервалов содержит два временных полуинтервала. Каждый из временных полуинтервалов включает в себя два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика. Множество временных интервалов включает в себя первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом. Первый временной полуинтервал включает в себя первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала. Второй временной полуинтервал включает в себя второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика. Этапы также включают в себя разделение первого и второго сегментов трафика на множество подсегментов. Множество подсегментов содержит первый подсегмент и второй подсегмент, следующий за первым подсегментом. Этапы дополнительно включают в себя регулировку эквалайзера на первом пакете пилот-сигнала, чтобы получить первое множество отрегулированных коэффициентов отвода, и регулировку эквалайзера на втором пакете пилот-сигнала, чтобы получить второе множество отрегулированных коэффициентов отвода. Этапы дополнительно включают в себя интерполирование между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить первый набор интерполированных коэффициентов отвода для первого подсегмента. Этапы дополнительно включают в себя коррекцию первого подсегмента с использованием первого набора интерполированных коэффициентов отвода.
Описывается машиночитаемый носитель. Носитель хранит команды. Когда команды выполняются, по меньшей мере, одним процессором беспроводного терминала доступа, команды побуждают беспроводной терминал доступа выполнять некоторое количество этапов. Этапы включают в себя прием множества временных интервалов, причем каждый временной интервал в множестве временных интервалов содержит два временных полуинтервала. Каждый из временных полуинтервалов включает в себя два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика. Множество временных интервалов включает в себя первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, без временного полуинтервала, разделяющего первый временной полуинтервал и второй временной полуинтервал. Первый временной полуинтервал включает в себя первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала. Второй временной полуинтервал включает в себя второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика. Этапы также включают в себя разделение первого и второго сегментов трафика на множество подсегментов. Множество подсегментов включает в себя первый подсегмент и второй подсегмент, следующий за первым подсегментом. Этапы дополнительно включают в себя измерение отношения уровня сигнала к совокупному уровню помех и шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное SINR, и измерение отношения уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR. Этапы дополнительно включают в себя интерполирование между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента. Этапы дополнительно включают в себя предоставление пользователю, по меньшей мере, некоторых данных во множестве подсегментов.
Эти и другие особенности настоящего изобретения станут понятнее на основании нижеследующего описания, чертежей и прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 иллюстрирует избранные компоненты сети связи, в которой приемник интерполирует коэффициенты эквалайзера и/или значения SINR;
Фиг.2 иллюстрирует избранные элементы кадров прямой линии связи, где временные полуинтервалы трафика делятся на подсегменты для интерполяции коэффициентов эквалайзера и/или значений SINR;
Фиг.3 иллюстрирует избранные элементы кадров прямой линии связи, где временные полуинтервалы трафика делятся на подсегменты для интерполяции коэффициентов эквалайзера и/или значений SINR и где подсегмент пересекает границу сегмента, границу временного полуинтервала и границу временного интервала; и
Фиг.4 иллюстрирует избранные этапы процесса для функционирования приемника с коэффициентами отвода и интерполяцией SINR.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В этом документе термины "вариант осуществления", "модификация" и аналогичные выражения используются для ссылки на конкретное устройство, процесс или изделие, но не обязательно на одно и то же устройство, процесс или изделие. Таким образом, "один вариант осуществления" (или аналогичное выражение), используемый в одном месте или контексте, может относиться к конкретному устройству, процессу или изделию; такое же или аналогичное выражение в другом месте может относиться к другому устройству, процессу или изделию. Выражения "альтернативный вариант осуществления", "в качестве альтернативы" и аналогичные фразы могут использоваться для указания одного из некоторого количества разных возможных вариантов осуществления. Количество возможных вариантов осуществления не обязательно ограничено двумя или каким-нибудь другим количеством.
Термин "интерполяция" означает любой процесс вычисления (приближения или оценки) новой точки между двумя существующими точками данных на основе существующих точек данных.
Терминал доступа, который также может называться АТ, абонентской станцией, пользовательским оборудованием, UE, мобильным терминалом, МТ или сотовым устройством связи, может быть подвижным или стационарным и может взаимодействовать с одной или несколькими базовыми приемопередающими станциями. Терминал доступа может быть любым из некоторого количества типов устройств, включающих, но не только, плату персонального компьютера (РС), внешний или внутренний модем, беспроводной телефон и персональный цифровой помощник (PDA) с возможностью беспроводной связи. Терминал доступа передает и принимает пакеты данных к контроллеру радиосети или от него через одну или несколько базовых приемопередающих станций.
Базовые приемопередающие станции и контроллеры базовых станций являются частями сети, называемой радиосетью, RN, или сетью доступа, AN. Радиосеть может быть UTRAN, или наземной сетью радиодоступа UMTS. Радиосеть может перемещать пакеты данных между несколькими терминалами доступа. Радиосеть дополнительно может быть подключена к дополнительным сетям вне радиосети, например корпоративной интрасети, Интернету, коммутируемой телефонной сети общего пользования (PSTN) или другой радиосети, и может перемещать пакеты с данными и речью между каждым терминалом доступа и такими внешними сетями. В зависимости от соглашений и определенных реализаций базовая приемопередающая станция может называться другими названиями, включая Узел Б, систему базовых станций (BSS) и просто базовую станцию. Аналогичным образом контроллер базовой станции может называться другими названиями, включая контроллер радиосети, RNC, контроллер, центр коммутации мобильной связи или обслуживающий узел поддержки GPRS.
Объем изобретения распространяется на эти и аналогичные компоненты системы беспроводной связи, а также на другое электронное оборудование.
Слово "типовой" в этом документе может использоваться, чтобы обозначать "служащий в качестве примера, отдельного случая или иллюстрации". Любой вариант осуществления или модификация, описанный в данном документе как "типовой", не обязательно должен быть истолкован как предпочтительный или выгодный по сравнению с другими вариантами осуществления или модификациями. Все варианты осуществления и модификации, описанные в этом описании, являются типовыми вариантами осуществления и модификациями, предоставленными для обеспечения возможности специалистам в данной области техники изготовить и использовать изобретение, а не обязательно для ограничения объема правовой охраны, предоставленного изобретению.
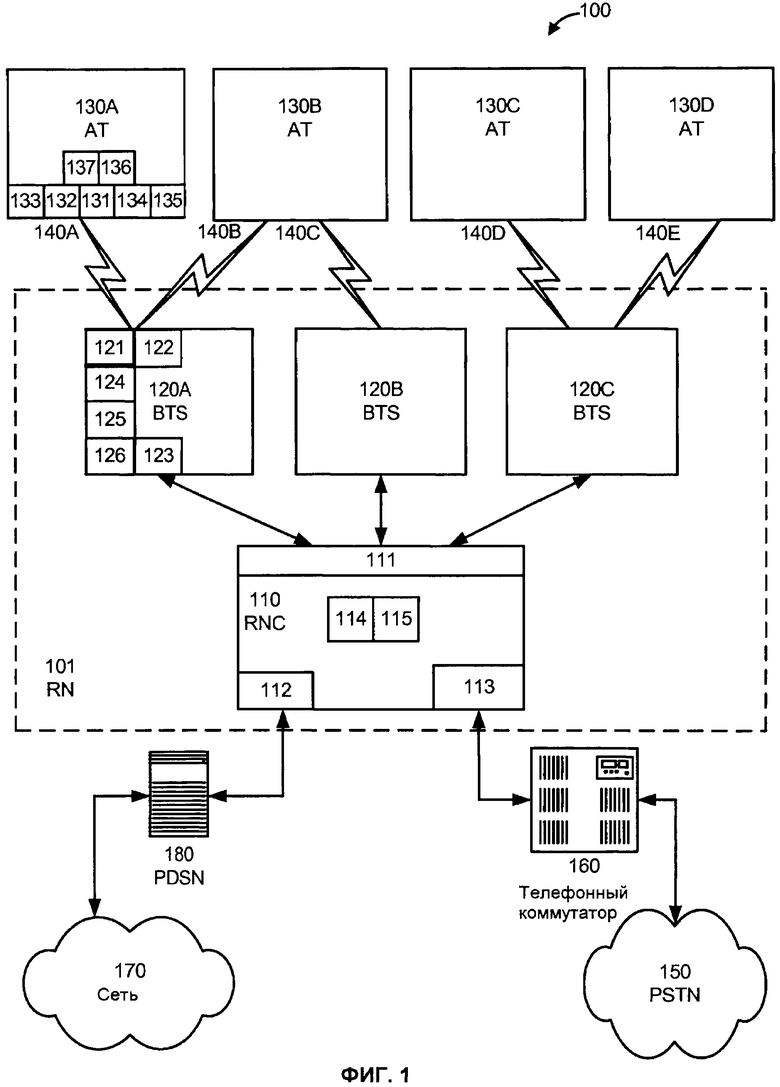
Фиг.1 иллюстрирует избранные компоненты сети 100 связи, которая включает в себя контроллер 110 радиосети, соединенный с беспроводными базовыми приемопередающими станциями 120A, 120B и 120C. Базовые приемопередающие станции 120 взаимодействуют с терминалами 130A, 130B, 130C и 130D доступа посредством беспроводных соединений с 140A по 140E. Контроллер 110 радиосети соединяется с коммутируемой телефонной сетью 150 общего пользования через телефонный коммутатор 160 и с сетью 170 с коммутацией пакетов через узел 180 обслуживания пакетных данных ("PDSN"). Обмен данными между различными элементами сети, например контроллером 110 радиосети и узлом 180 обслуживания пакетных данных, может быть реализован с использованием любого количества протоколов, например Интернет-протокола ("IP"), протокола с режимом асинхронной передачи ("АТМ"), Т1, Е1, ретрансляции кадров и других протоколов.
Сеть 100 связи может предоставлять терминалам 130 доступа как услуги передачи данных, так и услуги сотовой телефонии. В качестве альтернативы сеть 100 связи может предоставлять только услуги передачи данных либо только услуги телефонии.
Несколько или даже все терминалы 130 доступа могут находиться в одной соте или узле, либо каждый терминал 130 доступа может находиться в отдельной соте или узле.
Типичный терминал доступа, например терминал 130A доступа, включает в себя схемы 131 приемника, схемы 132 передатчика, кодер 133, декодер 134, эквалайзер 135, процессор 136 и запоминающее устройство 137. Терминал доступа также может включать в себя или быть подключенным к одному или нескольким устройствам с пользовательским интерфейсом, например микрофону, динамику, дисплею или клавишной панели. Приемник, передатчик, кодер, декодер и эквалайзер конфигурируются процессором, исполняющим код, сохраненный в запоминающем устройстве. Каждый терминал 130 доступа выполнен с возможностью передачи данных с использованием, по меньшей мере, одного протокола передачи, такого как протоколы беспроводной пакетной передачи, описанные выше. Терминалы 130 доступа взаимодействуют с базовыми приемопередающими станциями 120 по каналам связи 140A-140E, как показано на фиг.1. Каждый канал 140 связи может включать в себя как прямую линию связи, так и обратную линию связи с соответствующим терминалом 130 доступа.
Каждая из базовых приемопередающих станций 120 включает в себя один или несколько беспроводных приемников (например, приемник 121 в BTS 120A), один или несколько беспроводных передатчиков (например, передатчик 122 в BTS 120A), интерфейс контроллера радиосети (например, интерфейс 123), запоминающее устройство (например, запоминающее устройство 124), процессор (например, процессор 125) и схемы кодера/декодера (например, схемы 126 кодера/декодера). Пара "приемник/передатчик" в каждой базовой приемопередающей станции конфигурируется процессором станции, функционирующим под управлением программного кода, сохраненного в запоминающем устройстве BTS, чтобы устанавливать прямые и обратные линии связи с терминалами 130 доступа, чтобы отправлять пакеты данных и принимать пакеты данных от терминалов 130 доступа. Например, в случае услуг передачи данных базовые приемопередающие станции 120 принимают пакеты данных прямой линии связи из сети 170 с коммутацией пакетов посредством узла 180 обслуживания пакетных данных и посредством контроллера 110 радиосети и передают эти пакеты терминалам 130 доступа. Базовые приемопередающие станции 120 принимают пакеты данных обратной линии связи, которые возникают на терминалах 130 доступа, и перенаправляют эти пакеты в сеть 170 с коммутацией пакетов через контроллер 110 радиосети и узел 180 обслуживания пакетных данных. В случае услуг телефонии базовые приемопередающие станции 120 принимают пакеты данных прямой линии связи из телефонной сети 150 посредством телефонного коммутатора 160 и посредством контроллера 110 радиосети и передают эти пакеты терминалам 130 доступа. Содержащие речь пакеты, возникающие на терминалах 130 доступа, принимаются на базовых приемопередающих станциях 120 и перенаправляются в телефонную сеть 150 через контроллер 110 радиосети и телефонный коммутатор 160.
В качестве альтернативы каждый передатчик и приемник BTS могут иметь один или несколько отдельных процессоров.
Контроллер 110 радиосети включает в себя один или несколько интерфейсов 111 с базовыми приемопередающими станциями 120, интерфейс 112 с узлом 180 обслуживания пакетных данных и интерфейс 113 с телефонным коммутатором 160. Интерфейсы 111, 112 и 113 работают под управлением одного или нескольких процессоров 114, исполняющих программный код, сохраненный в запоминающем устройстве 115.
Как проиллюстрировано на фиг.1, сеть 100 включает в себя одну коммутируемую телефонную сеть общего пользования, одну сеть с коммутацией пакетов, один контроллер базовой станции, три базовые приемопередающие станции и четыре терминала доступа. Специалист в данной области техники после прочтения этого документа признал бы, что в качестве альтернативы сети не должны ограничиваться любым конкретным количеством этих компонентов. Например, может включаться меньшее или большее количество базовых приемопередающих станций и терминалов доступа. Кроме того, сеть 100 связи может подключать терминалы 130 доступа к одной или нескольким дополнительным сетям связи, например второй сети беспроводной связи, имеющей некоторое количество беспроводных терминалов доступа.
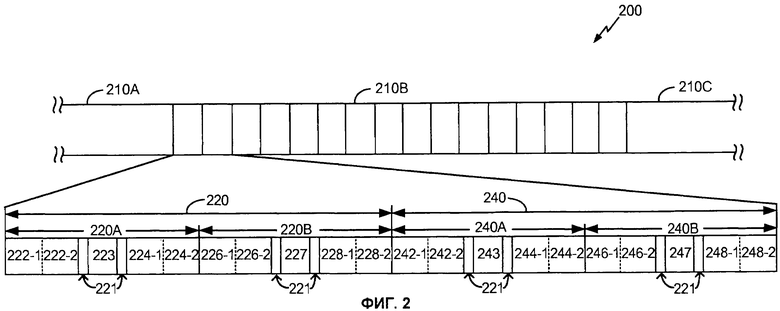
Фиг.2 показывает кадры 210A, 210B и 210C канала прямой линии 200 связи между выбранной BTS 120 и выбранными терминалами 130 доступа. Выбранная BTS может быть BTS 120A, а выбранный терминал доступа может быть терминалом 130A доступа; для простоты в дальнейшем мы будем ссылаться на эти сетевые устройства просто как BTS 120 и терминал 130 доступа соответственно. Отметим, что хотя на фиг.2 показано только три кадра, могут присутствовать и обычно присутствуют многие дополнительные кадры. В типовой системе каждый кадр содержит шестнадцать временных интервалов, каждый временной интервал длиной в 2048 элементарных посылок и соответствует длительности временного интервала в 1,67 миллисекунду; каждый кадр соответственно равен по длительности 26,67 миллисекундам. Временные интервалы кадра 210B включают в себя последовательные временные интервалы 220 и 240, которые показанные с дополнительными подробностями. Отметим, что другие временные интервалы выглядели бы также или практически также на этом уровне абстракции.
Каждый временной интервал разделяется на два временных полуинтервала с пакетами пилот-сигналов, переданными в середине каждого временного полуинтервала. Временной интервал 220 содержит соответственно временные полуинтервалы 220A и 220B с пакетом 223 пилот-сигнала в середине временного полуинтервала 220A и другим пакетом 227 пилот-сигнала в середине временного полуинтервала 220B; временной интервал 240 аналогично содержит временные полуинтервалы 240A и 240B с пакетами 243 и 247 пилот-сигналов соответственно. Каждый пакет пилот-сигнала окружается частями 221 MAC. Каждое сочетание пакетов пилот-сигнала с окружающими его MAC-частями разбивает соответствующий временной полуинтервал на два переносящих трафик сегмента. Здесь "трафик" относится к данным, отличным от пакетов пилот-сигнала и частей MAC; трафик обычно включает в себя полезные данные. Как показано на фиг.2, сегментами временных интервалов 220 и 240 в возрастающем порядке времени являются сегменты 222, 224, 226, 228, 242, 244, 246 и 248. Каждый из этих сегментов может занимать 400 элементарных посылок в длину, тогда как каждый из пакетов 223, 227, 243 и 247 пилот-сигнала может занимать 96 элементарных посылок в длину.
Терминал 130 доступа включает в себя приемник со схемами 131 приемника, декодером 134 и эквалайзером 135. Функционирование терминала доступа и его компонентов управляется процессором 136, исполняющим команду, сохраненную в запоминающем устройстве 137. В работе приемник принимает прямую линию связи с кадрами 210, включающими пакеты 223, 227, 243 и 247 пилот-сигнала во временных интервалах 220/240. Терминал доступа использует принятые пакеты пилот-сигнала для регулировки эквалайзера 135, получая соответствующие наборы коэффициентов отвода для демодуляции трафика в переносящих трафик сегментах.
Однако полученный таким образом одиночный набор коэффициентов не обязательно используется для демодуляции двух сегментов трафика на любой стороне пакета пилот-сигнала, которая использовалась для получения набора коэффициентов. Вместо этого каждый сегмент разбивается на несколько подсегментов. Например, как показано на фиг.2, каждый из сегментов разделяется на два подсегмента, хотя может использоваться другое число. Сегмент 222 соответственно разделяется на подсегменты 222-1 и 222-2, сегмент 224 соответственно разделяется на подсегменты 224-1 и 224-2 и так далее с соответствующими изменениями в номере сегмента. Для демодуляции, по меньшей мере, некоторых из этих подсегментов коэффициенты отвода эквалайзера определяются путем интерполирования коэффициентов, определенных с помощью регулировки эквалайзера на непосредственно предшествующих и непосредственно следующих пакетах пилот-сигнала.
Коэффициенты могут линейно интерполироваться между коэффициентами, определенными для последующих (то есть последовательных) пакетов пилот-сигнала. Обозначим наборы коэффициентов, определенные (посредством регулировки) для последовательных пакетов 223 и 227 пилот-сигнала, в виде CTk и CTk+1 соответственно, где нижние индексы относятся к индексу времени пакетов пилот-сигнала (который является таким же, как индекс временного полуинтервала). Также обозначим набор коэффициентов отвода эквалайзера, используемый для демодуляции подсегментов 224-1, в виде Ck,1. Этот последний набор коэффициентов затем может определяться путем линейной интерполяции по времени между CTk и CTk+1:
Ck,1=(4/5)*CTk+(1/5)*CTk+1.
Обозначая наборы коэффициентов эквалайзера, используемые для демодуляции подсегментов 224-2, 226-1 и 226-2, в виде Ck,2, Ck,3 и Ck,4 соответственно, их значения могут быть выведены следующим образом:
Ck,2=(3/5)*CTk+(2/5)*CTk+1;
Ck,3=(2/5)*CTk+(3/5)*CTk+1 и
Ck,4=(1/5)*CTk+(4/5)*CTk+1.
Отметим, что второй нижний индекс j в величинах Ck,j соответствует индексу определенного подсегмента в интервале времени между двумя последовательными пакетами 223 и 227 пилот-сигналов. Коэффициенты соответственно интерполируются практически линейным образом. Линейная интерполяция коэффициента, применимая к подсегменту, означает, что коэффициент вычисляется путем объединения взвешенных значений коэффициента одного и того же отвода, отрегулированных на пакетах пилот-сигнала, непосредственно предшествующих и непосредственно следующих за подсегментом; веса, назначенные отрегулированным коэффициентам, непосредственно предшествующим и непосредственно следующим за коэффициентом, применимым к подсегменту, обратно пропорциональны расстоянию между подсегментом и непосредственно предшествующим и непосредственно следующим пакетом пилот-сигнала. Таким образом, если временной интервал между центром подсегмента и центром непосредственно предшествующего пакетам пилот-сигнала равен x и временной интервал между центром подсегмента и центром непосредственно следующего пакета пилот-сигнала равен y, то относительный вес, назначенный соответствующему коэффициенту, отрегулированному на непосредственно предшествующем пакете пилот-сигнала, равен (y/(x+y)), а относительный вес, назначенный соответствующему коэффициенту, отрегулированному на непосредственно следующем пакете пилот-сигнала, равен (x/(x+y)). Как проиллюстрировано в вышеприведенном примере, это весовое соотношение может соблюдаться скорее большей частью, чем точно, с небольшими отклонениями, например, из-за квантования интервалов времени (длина элементарной посылки).
Следует понимать, что вышеприведенные формулы и другие описания интерполяции в этом документе подразумевают одинаковый тип операции, выполняемый над каждым из отдельных коэффициентов в каждом наборе коэффициентов. В качестве поясняющего примера предположим, что каждый набор коэффициентов представлен вектором типа {cj[1], cj[2]... cj[n]}, где нижний индекс является индексом подсегмента, а величина в скобках является индексом отвода, соответствующим отдельным отводам в эквалайзере. Также предположим, что CTk={ctk[1], ctk[2],... ctk[n]}, где величина в скобках также является индексом отвода. Дополнительно предположим, что CTk+1={ctk+1[1], ctk+1[2],... ctk+1[n]}, где величина в скобках снова является индексом отвода. Коэффициенты, соответствующие одному и тому же отводу, интерполируются одинаково:
c1[m]=(4/5)* ctk[m]+(1/5)* ctk+1[m],
c2[m]=(3/5)* ctk[m]+(2/5)* ctk+1[m],
c3[m]=(2/5)* ctk[m]+(3/5)* ctk+1[m] и
c4[m]=(1/5)* ctk[m]+(4/5)* ctk+1[m], для всех m между 1 и числом, представляющим наивысший индекс отвода в эквалайзере.
В некоторых модификациях не интерполируются коэффициенты, используемые для демодуляции подсегментов, смежных с конкретным пакетом пилот-сигнала (с его сопроводительными MAC-частями), а вместо этого для таких подсегментов непосредственно используются коэффициенты, полученные из регулировки эквалайзера для пакета пилот-сигнала. Непосредственно предшествующий пример затем был бы изменен, чтобы Ck,1=CTk и Ck,4= CTk+1, тогда как Ck,2 и Ck,3 по-прежнему интерполируются, как описано выше.
Смещение отвода может происходить от одной регулировки на пакете пилот-сигнала до следующей регулировки на пакете пилот-сигнала. Это может быть обусловлено изменением центра масс или скольжением синхронизации, которое является сдвигом во временном сдвиге центра масс эквалайзера из-за грубого изменения ухода частоты между базовой станцией и терминалом доступа со временем. Для повышенной эффективности эквалайзера может быть желательно поддерживать эквалайзер почти центрированным, чтобы самые сильные многолучевые сигналы попадали в определенный промежуток времени слева и справа от центра адаптивного фильтра с конечной импульсной характеристикой. Логика смещения отводов в сочетании с логикой обнуления отводов может выполнять эту работу и сдвигать коэффициенты эквалайзера влево или вправо, как требуется для поддержания эквалайзера почти центрированным. Нулевые коэффициенты отвода могут смещаться для заполнения передних или задних отводов, в зависимости от направления смещения. Это используется для корректировки синхронизации эквалайзера. Смещение отводов более подробно описывается в принадлежащем тому же правообладателю Патенте США с номером 7012952, озаглавленном "Method and Apparatus for Adjusting Delay in Systems With Time-Burst Pilot and Fractionally Spaced Equalizers".
Коэффициенты эквалайзера затем смещаются в правильном направлении перед тем, как начнется регулировка на пакете пилот-сигнала. В таких случаях предыстория также смещается аналогичным образом, чтобы интерполяция коэффициентов выполнялась на правильных индексах. Предыстория в этом контексте означает два набора коэффициентов в запоминающем устройстве от предыдущих двух пакетов пилот-сигнала.
Процесс деления на подсегменты не обязательно выполнять так, чтобы каждый подсегмент полностью содержался в одном сегменте, одном временном полуинтервале или одном временном интервале. В модификациях подсегмент может пересекать границу сегмента, границу временного полуинтервала или границу временного интервала. Фиг.3 иллюстрирует пример, где подсегмент пересекает границу временного интервала (а также границы сегмента и временного полуинтервала). Как показано на фиг.3, временной интервал 320 включает в себя временные полуинтервалы 320A и 320B с пакетом 323 пилот-сигнала в середине временного полуинтервала 320A и другим пакетом 327 пилот-сигнала в середине временного полуинтервала 320B; временной интервал 340 аналогично содержит временные полуинтервалы 340A и 340B с пакетами 343 и 347 пилот-сигналов в середине каждого временного полуинтервала. Каждый из пакетов 323/327/343/347 пилот-сигнала окружается соседними MAC-частями 321. Каждое сочетание пакетов пилот-сигнала и его соседних MAC-частей разбивает соответствующий временной полуинтервал на два переносящих трафик сегмента, которые в возрастающем порядке времени являются сегментами 322, 324, 326, 328, 342, 344, 346 и 348. До настоящего времени это является по существу такой же структурой временного интервала, как показана на фиг. 2. Однако здесь каждый набор из двух соседних сегментов разбивается на пять (нечетное число) подсегментов. Сегменты 328 и 342 (которые находятся между пакетами 327 и 343 пилот-сигналов и являются смежными друг с другом) теперь разделяются на подсегменты SBS-1, SBS-2, SBS-3, SBS-4 и SBS-5. Отметим, что SBS-3 охватывает границы сегмента, временного полуинтервала и временного интервала.
Эквалайзер снова регулируется на пакетах 327 и 343 пилот-сигнала, чтобы получить наборы отрегулированных коэффициентов CTk и CTk+1 соответственно. Чтобы демодулировать конкретный подсегмент, набор коэффициентов получается путем интерполирования между наборами отрегулированных коэффициентов, окружающими конкретный сегмент. Например, наборы коэффициентов с Ck,1 по Ck,5 для демодуляции подсегментов с SBS-1 по SBS-5 соответственно могут быть получены следующим образом:
Ck,1=(5/6)*CTk+(1/6)*CTk+1;
Ck,2=(4/6)*CTk+(2/6)*CTk+1;
Ck,3=(3/6)*CTk+(3/6)*CTk+1.
Ck,4=(2/6)*CTk+(4/6)*CTk+1 и
Ck,5=(1/6)*CTk+(5/6)*CTk+1.
Снова может быть предпочтительным не интерполировать коэффициенты для подсегментов, непосредственно смежных с пакетом пилот-сигнала, а вместо этого использовать наборы отрегулированных коэффициентов, полученные для соседних пакетов пилот-сигнала, чтобы демодулировать конкретные подсегменты. Например, Ck,1 может быть установлен в CTk, Ck,5 может быть установлен в CTk+1, а Ck,2 по Ck,4 могут быть интерполированы, как описано выше. В более общем смысле коэффициенты только для некоторых выбранных подсегментов могут быть получены посредством интерполяции отрегулированных коэффициентов, окружающих сегменты. Конечно, как проиллюстрировано выше, все коэффициенты могут быть интерполированы.
Хотя фиг. 2 и 3 иллюстрируют разделение сегментов трафика на равные подсегменты, это не всегда нужно. Некоторые процессы и системы используют разделение на подсегменты, не все из которых являются равными. Кроме того, коррекцию не нужно проводить для всех данных в сегментах. В некоторых системах коррекция не выполняется для преамбул в сегментах трафика. В этом случае может отсутствовать необходимость включать преамбулы в процесс деления на подсегменты или выполнять интерполяцию для подсегментов, которые содержат только данные преамбулы.
SINR принятого сигнала иногда используется в обработке принятого сигнала.
Измерение SINR более подробно описывается в принадлежащем тому же правообладателю Патенте США с номером 7106792, озаглавленном "Method and Apparatus for Estimating the Signal to Interference-Plus-Noise Ratio of a Wireless Channel".
SINR принятого сигнала, измеренное во время пакетов пилот-сигнала, также может интерполироваться для подсегментов и затем использоваться в обработке информации в сегментах трафика. Например, SINR может интерполироваться для масштабирования выходного сигнала эквалайзера перед подачей выходного сигнала в блок, который вычисляет логарифмическое отношение правдоподобия (LLR). Интерполяция SINR может выполняться теми же способами, которые описываются во всем этом документе в отношении коэффициентов отвода. Ссылаясь снова на фиг.3, обозначим измерения SINR для пакетов 327 и 343 пилот-сигнала в виде SMk и SMk+1 соответственно. Затем интерполированные значения SINR с SIk,1 по SIk,5 для обработки подсегментов с SBS-1 по SBS-5 соответственно могут быть получены следующим образом:
SIk,1=(5/6)*SMk+(1/6)*SMk+1;
SIk,2=(4/6)*SMk+(2/6)*SMk+1;
SIk,3=(3/6)*SMk+(3/6)*SMk+1;
SIk,4=(2/6)*SMk+(4/6)*SMk+1 и
SIk,5=(1/6)*SMk+(5/6)*SMk+1.
Интерполяция SINR может осуществляться в линейной области/шкале в отличие от логарифмической области/шкалы или области/шкалы в децибелах. Если, например, измерения SINR SMk и SMk+1 выполняются, сохраняются или иным образом доступны в децибелах, они могут быть сначала преобразованы к линейной шкале. Затем может осуществляться интерполяция линейных значений, и интерполированные результаты могут быть преобразованы в децибелы и сохранены как значения в децибелах.
Как понял бы специалист в данной области техники после прочтения этого документа, значение "линейный", которое применено к области или шкале, не является таким же, как значение "линейный", которое применено к самому процессу интерполяции. SINR может интерполироваться в линейной области с использованием, например, способа нелинейной интерполяции.
Значения SINR только для некоторых выбранных подсегментов могут быть получены посредством интерполяции измерений SINR, полученных для пакетов пилот-сигнала. Например, значения SINR, используемые в обработке подсегментов, непосредственно смежных с конкретным пакетом пилот-сигнала, могут устанавливаться в измеренное значение SINR для того же конкретного пакета пилот-сигнала. Конечно, как проиллюстрировано выше, все значения SINR могут быть интерполированы.
Фиг.4 иллюстрирует избранные этапы процесса 400 для функционирования приемника с коэффициентами отвода и интерполяцией SINR. На этапе 401 приемник является действующим и выполнен с возможностью приема временных интервалов с пакетами пилот-сигналов в середине каждого временного полуинтервала и сегментами трафика, по меньшей мере, в частях оставшихся частей временных полуинтервалов.
На этапе 405 принимается первый временной полуинтервал, включающий первый пакет пилот-сигнала в середине первого временного полуинтервала и первый сегмент трафика, следующий за первым временным полуинтервалом.
На этапе 410 эквалайзер приемника регулируется на основе первого пакета пилот-сигнала, чтобы получить первый набор отрегулированных коэффициентов эквалайзера.
На этапе 415 определяется первое измеренное SINR на основе первого пакета пилот-сигнала.
На этапе 420 принимается второй временной полуинтервал, включающий второй пакет пилот-сигнала в середине второго временного полуинтервала и второй сегмент трафика, следующий за вторым временным полуинтервалом.
На этапе 425 эквалайзер приемника регулируется на основе второго пакета пилот-сигнала, чтобы получить второй набор отрегулированных коэффициентов эквалайзера.
На этапе 430 определяется второе измеренное SINR на основе второго пакета пилот-сигнала.
На этапе 435 первый и второй сегменты трафика сегментируются (разделяются) на три или более подсегмента.
На этапе 440 коэффициенты эквалайзера интерполируются между первым и вторым набором, чтобы получить множество интерполированных коэффициентов для одного или нескольких подсегментов.
На этапе 445 SINR интерполируется между первым и вторым измеренными значениями SINR, чтобы получить интерполированное значение или значения SINR для одного или нескольких подсегментов.
На этапе 450 трафик в подсегментах корректируется с использованием коэффициентов отвода, применимых к каждому подсегменту. Применимые коэффициенты отвода, по меньшей мере, для одного из подсегментов определены путем интерполяции на этапе 440. Затем трафик в подсегментах демодулируется.
На этапе 455 демодулированный трафик в подсегментах обрабатывается с использованием значений SINR, применимых к каждому подсегменту. Например, выходной сигнал эквалайзера масштабируется с использованием значений SINR. Применимое SINR, по меньшей мере, для одного из подсегментов определено путем интерполяции на этапе 445.
Затем процесс 400 завершается на этапе 499. Следует отметить, что процесс обычно повторялся бы с приемом следующих временных полуинтервалов. Кроме того, некоторые этапы (или результаты, полученные на этапах) одного экземпляра процесса 400 могут повторно использоваться в следующем экземпляре того же процесса.
Интерполяция SINR и интерполяция коэффициента отвода может применяться на практике вместе или в отдельности. Таким образом, система может применять интерполяцию коэффициента отвода без интерполяции SINR, она может применять интерполяцию SINR без интерполяции коэффициента отвода, либо она может одновременно применять интерполяцию коэффициента отвода и SINR. В последнем случае коэффициенты отвода и SINR могут интерполироваться одинаково и на тех же подсегментах; в качестве альтернативы, они могут интерполироваться разными способами и/или на разных подсегментах.
Хотя вышеприведенные примеры иллюстрируют линейную или практически линейную интерполяцию, могут использоваться другие виды интерполяции, например полиноминальная интерполяция, включающая кубическую интерполяцию. Также может использоваться методика усреднения. Усреднение означает использование среднего из значений коэффициентов, отрегулированных на последовательных пакетах пилот-сигнала для заданного отвода для всех подсегментов, находящихся между последовательными пакетами пилот-сигналов. Для интерполяции коэффициента линейная интерполяция может объединяться с усреднением коэффициентов. Нижеследующая формула может использоваться для определения коэффициента  заданного отвода для подсегмента между двумя последовательными пакетами пилот-сигналов, обозначенными с помощью индексов времени временного полуинтервала [n-2] (индекс раньше во времени) и [n-1] (следующий во времени индекс):
заданного отвода для подсегмента между двумя последовательными пакетами пилот-сигналов, обозначенными с помощью индексов времени временного полуинтервала [n-2] (индекс раньше во времени) и [n-1] (следующий во времени индекс):

Вышеприведенная формула предполагает расстояние между пакетами пилот-сигналов в 1024 (210) элементарные посылки, а отсюда появление значения 210 для временного интервала. В формуле  и
и  представляют соответственно значения данного коэффициента отвода, отрегулированные на пакетах пилот-сигнала во временных полуинтервалах [n-1] и [n-2]; коэффициент интерполяции
представляют соответственно значения данного коэффициента отвода, отрегулированные на пакетах пилот-сигнала во временных полуинтервалах [n-1] и [n-2]; коэффициент интерполяции  является расстоянием от центра подсегмента до центра пакета пилот-сигнала с индексом [n-1]; и Avg является коэффициентом усреднения, который уравновешивает вес усреднения (или сглаживания) и линейной интерполяции. Например, Avg=0 сокращает формулу просто до линейной интерполяции, Avg=1 сокращает формулу просто до усреднения, тогда как Avg=0,5 дает равный вес усреднению и линейной интерполяции.
является расстоянием от центра подсегмента до центра пакета пилот-сигнала с индексом [n-1]; и Avg является коэффициентом усреднения, который уравновешивает вес усреднения (или сглаживания) и линейной интерполяции. Например, Avg=0 сокращает формулу просто до линейной интерполяции, Avg=1 сокращает формулу просто до усреднения, тогда как Avg=0,5 дает равный вес усреднению и линейной интерполяции.
Неисключительным примером разных видов интерполяции является такой, где система интерполирует коэффициенты отвода линейно наряду с использованием кубической интерполяции для SINR. Другим неисключительным примером является такой, где система линейно интерполирует только коэффициенты отвода для подсегментов, несмежных с пакетами пилот-сигналов, интерполируя при этом SINR для всех подсегментов с использованием кубической интерполяции. Еще одним неисключительным примером является такой, где система использует большее количество подсегментов для интерполяции SINR, чем количество подсегментов, которое она использует для интерполяции коэффициента. Конечно, также возможны и другие примеры.
Процессы и системы, описанные в этом документе, могут использоваться в оптимизированных под данные системах, то есть системах, оптимизированных для передачи данных (в отличие от передачи речи), и в особенности такие системы оптимизируются для передачи данных по нисходящей линии связи (прямой линии связи). Оптимизированные под данные системы не должны исключать передачу данных по восходящей линии связи (обратной линии связи) или передачу речи в любом направлении. Следует отметить, что речь может передаваться в виде данных, например, в случае передач голоса по IP-протоколу (VoIP). Процессы и системы также могут использоваться в системах только для данных, то есть системах, используемых только для передачи данных. Более того, процессы и системы могут использоваться в передаче речи как таковой, то есть передаче речи без использования VoIP.
Описанные процессы и системы могут использоваться в терминалах доступа беспроводной сотовой системы связи. Процессы и системы также (или вместо этого) могут использоваться на стороне радиосети в беспроводной сотовой системе связи, например в базовой приемопередающей станции. Процесс и системы могут использоваться с многоотводным когерентным приемником или без него.
В некоторых системах этапы для интерполирования коэффициентов эквалайзера сохраняются в микропрограммном обеспечении, тогда как в других системах этапы сохраняются в программном обеспечении. Однако эти выборы хранения не обязательно являются необходимыми во всех системах.
Хотя этапы и решения различных способов в этом раскрытии изобретения могут быть описаны последовательно, некоторые из этих этапов и решений могут выполняться отдельными элементами совместно или параллельно, асинхронно или синхронно, конвейерным способом или иным образом. Отсутствует конкретное требование, что этапы и решения должны выполняться в том же порядке, в котором это описание их перечисляет, за исключением того, где это явно указано, выясняется иным образом из контекста или необходимо по сути. Однако следует отметить, что в выбранных модификациях этапы и решения выполняются в конкретных последовательностях, описанных выше и/или показанных на прилагаемых чертежах. Кроме того, не каждый проиллюстрированный этап и решение могут быть необходимы в каждой системе в соответствии с изобретением, хотя некоторые этапы и решения, которые не были проиллюстрированы конкретно, могут быть желательными или необходимыми в некоторых системах в соответствии с изобретением.
Специалисты в данной области техники также поняли бы, что информация и сигналы могут быть представлены с использованием любой из ряда различных технологий и методик. Например, данные, инструкции, команды, информация, сигналы, разряды, символы и элементарные посылки, на которые могут ссылаться по всему вышеприведенному описанию, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами или любым их сочетанием.
Специалисты дополнительно признали бы, что различные пояснительные логические блоки, модули, схемы и этапы алгоритмов, описанные применительно к вариантам осуществления, раскрытым в этом документе, могут быть реализованы в виде электронных аппаратных средств, компьютерного программного обеспечения или их сочетаний. Чтобы ясно показать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные пояснительные компоненты, блоки, модули, схемы и этапы могут быть описаны выше, как правило, на основе их функциональных возможностей. Реализованы ли такие функциональные возможности как аппаратные средства, программное обеспечение или сочетание аппаратных средств и программного обеспечения, зависит от конкретного применения и конструктивных ограничений, налагаемых на всю систему. Квалифицированные специалисты могут реализовать описанные функциональные возможности различными путями для каждого конкретного применения, но такие решения по реализации не должны интерпретироваться как вызывающие отклонение от объема настоящего изобретения.
Различные пояснительные логические блоки, модули и схемы, описанные применительно к вариантам осуществления, раскрытым в этом документе, могут быть реализованы или выполнены с помощью универсального процессора, цифрового процессора сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства, схемы на дискретных компонентах или транзисторной логики, дискретных аппаратных компонентов или любого их сочетания, предназначенных для выполнения описанных в этом документе функций. Универсальный процессор может быть микропроцессором, но в альтернативном варианте процессор может быть любым процессором, контроллером, микроконтроллером или конечным автоматом. Процессор также может быть реализован в виде сочетания вычислительных устройств, например сочетания DSP и микропроцессора, множества микропроцессоров, одного или нескольких микропроцессоров совместно с ядром DSP или любой другой подобной конфигурации.
Этапы способа или алгоритма, которые могут быть описаны применительно к вариантам осуществления, раскрытым в этом документе, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, выполняемом процессором, или в сочетании этих двух элементов. Программный модуль может находиться в памяти RAM, флэш-памяти, памяти ROM, памяти EPROM, памяти EEPROM, регистрах, на жестком диске, съемном диске, компакт-диске или любом другом виде носителя информации, известного в данной области техники. Типовой носитель информации соединяется с процессором таким образом, что процессор может считывать информацию и записывать информацию на носитель информации. В альтернативном варианте носитель информации может составлять единое целое с процессором. Процессор и носитель информации могут постоянно находиться в ASIC. ASIC может постоянно находиться в терминале доступа. В качестве альтернативы процессор и носитель информации могут находиться в виде обособленных компонентов в терминале доступа.
Предшествующее описание раскрытых вариантов осуществления предоставляется, чтобы дать возможность любому специалисту в данной области техники создавать или использовать настоящее изобретение. Различные модификации к этим вариантам осуществления будут полностью очевидны специалистам в данной области техники, а общие принципы, определенные в этом документе, могут быть применены к другим вариантам осуществления. Таким образом, настоящее изобретение не предназначено, чтобы ограничиваться показанными в этом документе вариантами осуществления, а должно соответствовать самому широкому объему, согласующемуся с принципами и новыми признаками, раскрытыми в этом документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРУКТУРА ПЕРЕДАЧИ, ПОДДЕРЖИВАЮЩАЯ МНОГОПОЛЬЗОВАТЕЛЬСКОЕ ПЛАНИРОВАНИЕ И MIMO ПЕРЕДАЧУ | 2008 |
|
RU2454798C2 |
| СИСТЕМА БЕСПРОВОДНОЙ СВЯЗИ CDMA | 2007 |
|
RU2432690C2 |
| СТРУКТУРА ПЕРЕДАЧИ, ПОДДЕРЖИВАЮЩАЯ МНОГОПОЛЬЗОВАТЕЛЬСКОЕ ПЛАНИРОВАНИЕ И ПЕРЕДАЧУ MIMO | 2006 |
|
RU2384949C2 |
| ОЦЕНКА КАНАЛА ДЛЯ ПОДАВЛЕНИЯ ПОМЕХ | 2005 |
|
RU2364023C2 |
| УПРАВЛЕНИЕ МОЩНОСТЬЮ ДЛЯ СИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2415515C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ПЕРЕДАЧИ ДАННЫХ В СИСТЕМЕ СВЯЗИ | 2004 |
|
RU2364026C2 |
| ЭФФЕКТИВНАЯ СТРУКТУРА КАНАЛОВ ДЛЯ СИСТЕМЫ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2406264C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГИБРИДНОЙ КОРРЕКЦИИ С РЕШАЮЩЕЙ ОБРАТНОЙ СВЯЗЬЮ | 2005 |
|
RU2407197C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГИБРИДНОЙ КОРРЕКЦИИ С РЕШАЮЩЕЙ ОБРАТНОЙ СВЯЗЬЮ | 2003 |
|
RU2328081C2 |
| ПРИЕМНИК СИГНАЛА | 2005 |
|
RU2311736C2 |

Изобретение относится к беспроводной связи, в частности к настройке коэффициентов отвода эквалайзера и оценкам отношения уровня сигнала к совокупному уровню помех и шумов в приемнике. Техническим результатом является улучшение рабочих характеристик приемника. Указанный результат достигается тем, что в способе функционирования приемника в системе беспроводной связи принимают кадр, включающий в себя множество временных интервалов. Каждый временной интервал содержит два временных полуинтервала, содержащих по два сегмента трафика и пакеты пилот-сигнала между двумя сегментами трафика. Множество временных интервалов содержит первый и второй временные полуинтервалы, содержащие первый пакет пилот-сигнала и первый сегмент трафика, и второй сегмент трафика и второй пакет пилот-сигнала. Затем разделяют первый и второй сегменты трафика на множество подсегментов, содержащее первый подсегмент и второй подсегмент, регулируют эквалайзер приемника на первом пакете пилот-сигнала, чтобы получить первое множество отрегулированных коэффициентов отвода, регулируют эквалайзер приемника на втором пакете пилот-сигнала, чтобы получить второе множество отрегулированных коэффициентов отвода, интерполируют между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить первый набор интерполированных коэффициентов отвода для первого подсегмента; и корректируют первый подсегмент с использованием первого набора интерполированных коэффициентов отвода. 8 н. и 54 з.п. ф-лы, 4 ил.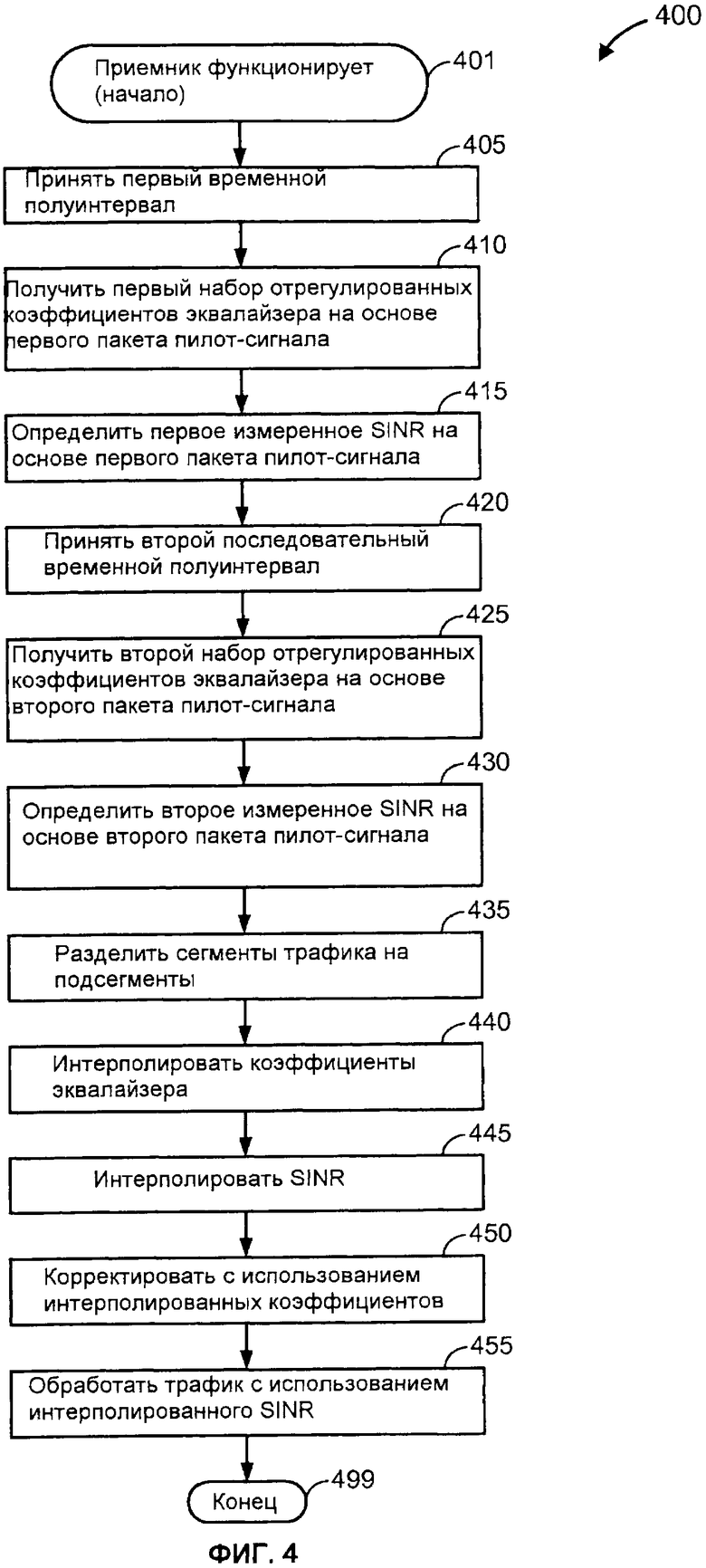
1. Способ функционирования приемника в системе беспроводной связи, содержащий этапы, на которых:
принимают кадр, включающий в себя множество временных интервалов, причем каждый временной интервал из множества временных интервалов содержит два временных полуинтервала, при этом каждый временной полуинтервал содержит два сегмента трафика и пакеты пилот-сигнала между двумя сегментами трафика, при этом множество временных интервалов содержит первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, причем первый временной полуинтервал содержит первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, второй временной полуинтервал содержит второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика;
разделяют первый и второй сегменты трафика на множество подсегментов, причем множество подсегментов содержит первый подсегмент и второй подсегмент, следующий за первым подсегментом;
регулируют эквалайзер приемника на первом пакете пилот-сигнала, чтобы получить первое множество отрегулированных коэффициентов отвода;
регулируют эквалайзер приемника на втором пакете пилот-сигнала, чтобы получить второе множество отрегулированных коэффициентов отвода;
интерполируют между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить первый набор интерполированных коэффициентов отвода для первого подсегмента; и
корректируют первый подсегмент с использованием первого набора интерполированных коэффициентов отвода.
2. Способ по п.1, в котором первый временной полуинтервал и второй временной полуинтервал не разделяются никаким другим временным полуинтервалом, способ дополнительно содержит этап, на котором пользователю предоставляют, по меньшей мере, некоторые данные во множестве подсегментов.
3. Способ по п.2, в котором этап интерполирования содержит этап, на котором используют линейную интерполяцию.
4. Способ по п.2, в котором этап, на котором интерполируют, содержит этап, на котором используют кубическую интерполяцию.
5. Способ по п.2, в котором этап, на котором интерполируют, содержит этап, на котором объединяют линейную интерполяцию с усреднением.
6. Способ по п.2, в котором этап, на котором разделяют, выполняется, чтобы второй подсегмент содержал первую часть из первого временного полуинтервала и вторую часть из второго временного полуинтервала.
7. Способ по п.2, в котором:
первый временной полуинтервал принадлежит первому временному интервалу;
второй временной полуинтервал принадлежит второму временному интервалу, следующему за первым временным интервалом; и
этап, на котором разделяют, выполняется, чтобы второй подсегмент содержал первую часть из первого временного полуинтервала и вторую часть из второго временного полуинтервала.
8. Способ по п.2, в котором этап, на котором разделяют, выполняется, чтобы множество подсегментов дополнительно содержало третий подсегмент, предшествующий первому подсегменту, при этом способ дополнительно содержит этапы, на которых:
интерполируют между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить второй набор интерполированных коэффициентов отвода для второго подсегмента;
корректируют второй подсегмент с использованием второго набора интерполированных коэффициентов отвода;
интерполируют между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить третий набор интерполированных коэффициентов отвода для третьего подсегмента; и
корректируют третий подсегмент с использованием третьего набора интерполированных коэффициентов отвода.
9. Способ по п.2, в котором этап, на котором разделяют, выполняется, чтобы множество подсегментов дополнительно содержало третий подсегмент, предшествующий первому подсегменту, при этом способ дополнительно содержит этапы, на которых:
корректируют второй подсегмент с использованием второго множества отрегулированных коэффициентов отвода; и
корректируют третий подсегмент с использованием первого множества отрегулированных коэффициентов отвода.
10. Способ по п.2, дополнительно содержащий этапы, на которых:
определяют, когда в эквалайзере возникает смещение отвода между первым и вторым пакетами пилот-сигнала;
сдвигают коэффициенты эквалайзера в направлении, указанном смещением отвода, перед этапом, на котором регулируют эквалайзер на втором пакете пилот-сигнала; и
сдвигают предысторию эквалайзера в направлении, указанном смещением отвода.
11. Способ по п.2, дополнительно содержащий этапы, на которых: измеряют отношение уровня сигнала к совокупному уровню помех и
шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное отношение уровня сигнала к совокупному уровню помех и шумов (SINR);
измеряют отношение уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR; и
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента.
12. Способ по п.11, дополнительно содержащий этапы, на которых:
с помощью первого интерполированного SINR масштабируют выходной сигнал эквалайзера, соответствующий первому подсегменту, чтобы получить первый набор масштабированных данных;
вычисляют первое логарифмическое отношение правдоподобия у первого набора масштабированных данных; и
декодируют первый подсегмент с использованием первого логарифмического отношения правдоподобия.
13. Способ по п.12, в котором этап, на котором интерполируют между первым измеренным SINR и вторым измеренным SINR, содержит интерполирование в линейной области.
14. Способ по п.12, в котором этап, на котором разделяют, выполняется, чтобы множество подсегментов дополнительно содержало третий подсегмент, предшествующий первому подсегменту, при этом способ дополнительно содержит этапы, на которых:
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить второе интерполированное SINR для второго подсегмента;
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить третье интерполированное SINR для третьего подсегмента;
с помощью второго интерполированного SINR масштабируют выходной сигнал эквалайзера, соответствующий второму подсегменту, чтобы получить второй набор масштабированных данных;
с помощью третьего интерполированного SINR масштабируют выходной сигнал эквалайзера, соответствующий третьему подсегменту, чтобы получить третий набор масштабированных данных;
вычисляют логарифмическое отношение правдоподобия у второго набора масштабированных данных; и
вычисляют логарифмическое отношение правдоподобия у третьего набора масштабированных данных.
15. Способ по п.12, в котором этап, на котором разделяют, выполняется, чтобы множество подсегментов дополнительно содержало третий подсегмент, предшествующий первому подсегменту, при этом способ дополнительно содержит этапы, на которых:
с помощью второго измеренного SINR масштабируют выходной сигнал эквалайзера, соответствующий второму подсегменту, чтобы получить второй набор масштабированных данных;
с помощью первого измеренного SINR масштабируют выходной сигнал эквалайзера, соответствующий третьему подсегменту, чтобы получить третий набор масштабированных данных;
вычисляют логарифмическое отношение правдоподобия у второго набора масштабированных данных; и
вычисляют логарифмическое отношение правдоподобия у третьего набора масштабированных данных.
16. Способ функционирования приемника в системе беспроводной связи, содержащий этапы, на которых:
принимают кадр, включающий в себя множество временных интервалов, причем каждый временной интервал из множества временных интервалов содержит два временных полуинтервала, каждый временной полуинтервал содержит два сегмента трафика и пакеты пилот-сигнала между двумя сегментами трафика, причем множество временных интервалов содержит первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, причем первый временной
полуинтервал содержит первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, второй временной полуинтервал содержит второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика;
разделяют первый и второй сегменты трафика на множество подсегментов, причем множество подсегментов содержит первый подсегмент и второй подсегмент, следующий за первым подсегментом;
измеряют отношение уровня сигнала к совокупному уровню помех и шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное SINR;
измеряют отношение уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR;
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента; и
предоставляют пользователю, по меньшей мере, некоторые данные во множестве подсегментов.
17. Способ по п.16, в котором приемник содержит эквалайзер, при этом способ дополнительно содержит этапы, на которых:
с помощью первого интерполированного SINR масштабируют выходной сигнал эквалайзера, соответствующий первому подсегменту, чтобы получить первый набор масштабированных данных;
вычисляют первое логарифмическое отношение правдоподобия у первого набора масштабированных данных; и
декодируют первый подсегмент с использованием первого логарифмического отношения правдоподобия.
18. Способ по п.17, в котором этап, на котором интерполируют между первым измеренным SINR и вторым измеренным SINR, содержит этап, на котором интерполируют в линейной области.
19. Способ по п.17, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, при этом способ дополнительно содержит этапы, на которых:
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить второе интерполированное SINR для второго подсегмента;
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить третье интерполированное SINR для третьего подсегмента;
с помощью второго интерполированного SINR масштабируют выходной сигнал эквалайзера, соответствующий второму подсегменту, чтобы получить второй набор масштабированных данных;
с помощью третьего интерполированного SINR масштабируют выходной сигнал эквалайзера, соответствующий третьему подсегменту, чтобы получить третий набор масштабированных данных;
вычисляют логарифмическое отношение правдоподобия у второго набора масштабированных данных; и
вычисляют логарифмическое отношение правдоподобия у третьего набора масштабированных данных.
20. Способ по п.17, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, при этом способ дополнительно содержит этапы, на которых:
с помощью второго измеренного SINR масштабируют выходной сигнал эквалайзера, соответствующий второму подсегменту, чтобы получить второй набор масштабированных данных;
с помощью первого измеренного SINR масштабируют выходной сигнал эквалайзера, соответствующий третьему подсегменту, чтобы получить третий набор масштабированных данных;
вычисляют логарифмическое отношение правдоподобия у второго набора масштабированных данных; и
вычисляют логарифмическое отношение правдоподобия у третьего набора масштабированных данных.
21. Беспроводной терминал, содержащий:
приемник;
запоминающее устройство; и
контроллер, соединенный с приемником и запоминающим устройством, причем контроллер выполнен с возможностью:
приема множества временных интервалов, причем каждый временной интервал из множества временных интервалов содержит два временных полуинтервала, каждый временной полуинтервал содержит два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика, причем множество временных интервалов содержит первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, причем первый временной полуинтервал содержит первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, второй временной полуинтервал содержит второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика;
разделения первого и второго сегментов трафика на множество подсегментов, причем множество подсегментов содержит первый подсегмент и второй подсегмент, следующий за первым подсегментом;
регулировки эквалайзера на первом пакете пилот-сигнала, чтобы получить первое множество отрегулированных коэффициентов отвода;
регулировки эквалайзера на втором пакете пилот-сигнала, чтобы получить второе множество отрегулированных коэффициентов отвода;
интерполирования между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить первый набор интерполированных коэффициентов отвода для первого подсегмента; и
коррекции первого подсегмента с использованием эквалайзера с первым набором интерполированных коэффициентов отвода.
22. Беспроводной терминал по п.21, в котором первый временной полуинтервал и второй временной полуинтервал не разделяются никаким другим временным полуинтервалом, и контроллер дополнительно выполнен с возможностью предоставления пользователю, по меньшей мере, некоторых данных в трех или более подсегментах.
23. Беспроводной терминал по п.22, в котором контроллер выполнен с возможностью интерполирования с использованием линейной интерполяции.
24. Беспроводной терминал по п.22, в котором контроллер выполнен с возможностью интерполирования с использованием кубической интерполяции.
25. Беспроводной терминал по п.22, в котором контроллер выполнен с возможностью интерполирования путем объединения линейной интерполяции с усреднением.
26. Беспроводной терминал по п.22, в котором контроллер выполнен с возможностью разделения, чтобы второй подсегмент содержал первую часть из первого временного полуинтервала и вторую часть из второго временного полуинтервала.
27. Беспроводной терминал по п.22, в котором:
первый временной полуинтервал принадлежит первому временному интервалу;
второй временной полуинтервал принадлежит второму временному интервалу, следующему за первым временным интервалом; и
контроллер выполнен с возможностью разделения, таким образом, чтобы второй подсегмент содержал первую часть из первого временного полуинтервала и вторую часть из второго временного полуинтервала.
28. Беспроводной терминал по п.22, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и контроллер дополнительно выполнен с возможностью:
интерполирования между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить второй набор интерполированных коэффициентов отвода для второго подсегмента;
коррекции второго подсегмента с использованием второго набора интерполированных коэффициентов отвода;
интерполирования между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить третий набор интерполированных коэффициентов отвода для третьего подсегмента; и
коррекции третьего подсегмента с использованием третьего набора интерполированных коэффициентов отвода.
29. Беспроводной терминал по п.22, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и контроллер дополнительно выполнен с возможностью:
коррекции второго подсегмента с использованием второго множества отрегулированных коэффициентов отвода; и
коррекции третьего подсегмента с использованием первого множества отрегулированных коэффициентов отвода.
30. Беспроводной терминал по п.22, в котором контроллер дополнительно выполнен с возможностью:
определения, когда в эквалайзере возникает смещение отвода между первым и вторым пакетами пилот-сигналов;
сдвига коэффициентов эквалайзера в направлении, указанном смещением отвода, перед регулировкой эквалайзера на втором пакете пилот-сигнала; и
сдвига предыстории эквалайзера в направлении, указанном смещением отвода.
31. Беспроводной терминал по п.22, в котором контроллер дополнительно выполнен с возможностью:
измерения отношения уровня сигнала к совокупному уровню помех и шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное SINR;
измерения отношения уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR; и
интерполирования между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента.
32. Беспроводной терминал по п.31, в котором контроллер дополнительно выполнен с возможностью:
масштабирования выходного сигнала эквалайзера, соответствующего первому подсегменту, с помощью первого интерполированного SINR, чтобы получить первый набор масштабированных данных;
вычисления первого логарифмического отношения правдоподобия у первого набора масштабированных данных; и
декодирования первого подсегмента с использованием первого логарифмического отношения правдоподобия.
33. Беспроводной терминал по п.32, в котором интерполирование между первым измеренным SINR и вторым измеренным SINR содержит интерполирование в линейной области.
34. Беспроводной терминал по п.32, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и контроллер дополнительно выполнен с возможностью:
интерполирования между первым измеренным SINR и вторым измеренным SINR, чтобы получить второе интерполированное SINR для второго подсегмента;
интерполирования между первым измеренным SINR и вторым измеренным SINR, чтобы получить третье интерполированное SINR для третьего подсегмента;
масштабирования выходного сигнала эквалайзера, соответствующего второму подсегменту, с помощью второго интерполированного SINR, чтобы получить второй набор масштабированных данных;
масштабирования выходного сигнала эквалайзера, соответствующего третьему подсегменту, с помощью третьего интерполированного SINR, чтобы получить третий набор масштабированных данных;
вычисления логарифмического отношения правдоподобия у второго набора масштабированных данных; и
вычисления логарифмического отношения правдоподобия у третьего набора масштабированных данных.
35. Беспроводной терминал по п.32, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и контроллер дополнительно выполнен с возможностью:
масштабирования выходного сигнала эквалайзера, соответствующего второму подсегменту, с помощью второго измеренного SINR, чтобы получить второй набор масштабированных данных;
масштабирования выходного сигнала эквалайзера, соответствующего третьему подсегменту, с помощью первого измеренного SINR, чтобы получить третий набор масштабированных данных;
вычисления логарифмического отношения правдоподобия у второго набора масштабированных данных; и
вычисления логарифмического отношения правдоподобия у третьего набора масштабированных данных.
36. Беспроводной терминал, содержащий:
приемник;
запоминающее устройство; и
контроллер, соединенный с приемником и запоминающим устройством, причем контроллер выполнен с возможностью:
приема множества временных интервалов, причем каждый временной интервал из множества временных интервалов содержит два временных полуинтервала, каждый временной полуинтервал содержит два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика, причем множество временных интервалов содержит первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, при этом отсутствует временной полуинтервал, разделяющий первый временной полуинтервал и второй временной полуинтервал, причем первый временной полуинтервал содержит первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, второй временной полуинтервал содержит второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика;
разделения первого и второго сегментов трафика на множество подсегментов, причем множество подсегментов содержит первый подсегмент и второй подсегмент, следующий за первым подсегментом;
измерения отношения уровня сигнала к совокупному уровню помех и шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное SINR;
измерения отношения уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR;
интерполирования между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента; и
предоставления пользователю, по меньшей мере, некоторых данных во множестве подсегментов.
37. Беспроводной терминал по п.36, в котором контроллер дополнительно выполнен с возможностью:
масштабирования выходного сигнала эквалайзера, соответствующего первому подсегменту, с помощью первого интерполированного SINR, чтобы получить первый набор масштабированных данных;
вычисления первого логарифмического отношения правдоподобия у первого набора масштабированных данных; и
декодирования первого подсегмента с использованием первого логарифмического отношения правдоподобия.
38. Беспроводной терминал по п.37, в котором контроллер выполнен с возможностью интерполирования между первым измеренным SINR и вторым измеренным SINR путем интерполирования в линейной области.
39. Беспроводной терминал по п.37, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и контроллер дополнительно выполнен с возможностью:
интерполирования между первым измеренным SINR и вторым измеренным SINR, чтобы получить второе интерполированное SINR для второго подсегмента;
интерполирования между первым измеренным SINR и вторым измеренным SINR, чтобы получить третье интерполированное SINR для третьего подсегмента;
масштабирования выходного сигнала эквалайзера, соответствующего второму подсегменту, с помощью второго интерполированного SINR, чтобы получить второй набор масштабированных данных;
масштабирования выходного сигнала эквалайзера, соответствующего третьему подсегменту, с помощью третьего интерполированного SINR, чтобы получить третий набор масштабированных данных;
вычисления логарифмического отношения правдоподобия у второго набора масштабированных данных; и
вычисления логарифмического отношения правдоподобия у третьего набора масштабированных данных.
40. Беспроводной терминал по п.37, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и контроллер дополнительно выполнен с возможностью:
масштабирования выходного сигнала эквалайзера, соответствующего второму подсегменту, с помощью второго измеренного SINR, чтобы получить второй набор масштабированных данных;
масштабирования выходного сигнала эквалайзера, соответствующего третьему подсегменту, с помощью первого измеренного SINR, чтобы получить третий набор масштабированных данных;
вычисления логарифмического отношения правдоподобия у второго набора масштабированных данных; и
вычисления логарифмического отношения правдоподобия у третьего набора масштабированных данных.
41. Беспроводной терминал, содержащий:
средство для приема беспроводного сигнала;
средство для коррекции;
средство для хранения данных; и
средство для обработки, причем средство для обработки соединено со средством для приема, средством для коррекции и средством для хранения, где средство для обработки выполнено с возможностью:
приема множества временных интервалов, причем каждый временной интервал из множества временных интервалов содержит два временных полуинтервала, каждый временной полуинтервал содержит два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика, причем множество временных интервалов содержит первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, при этом отсутствует временной полуинтервал, разделяющий первый временной полуинтервал и второй временной полуинтервал, причем первый временной полуинтервал содержит первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, второй временной полуинтервал содержит второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика;
разделения первого и второго сегментов трафика на множество подсегментов, причем множество подсегментов содержит первый подсегмент и второй подсегмент, следующий за первым подсегментом;
регулировки средства для коррекции на первом пакете пилот-сигнала, чтобы получить первое множество отрегулированных коэффициентов отвода;
регулировки средства для коррекции на втором пакете пилот-сигнала, чтобы получить второе множество отрегулированных коэффициентов отвода;
интерполирования между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить первый набор интерполированных коэффициентов отвода для первого подсегмента;
коррекции первого подсегмента с использованием первого набора интерполированных коэффициентов отвода; и
предоставления пользователю, по меньшей мере, некоторых данных во множестве подсегментов.
42. Беспроводной терминал, содержащий:
средство для приема беспроводного сигнала;
средство для коррекции;
средство для хранения данных; и
средство для обработки, причем средство для обработки соединено со средством для приема, средством для коррекции и средством для хранения, причем средство для обработки выполнено с возможностью:
приема множества временных интервалов, причем каждый временной интервал из множества временных интервалов содержит два временных полуинтервала, каждый временной полуинтервал содержит два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика, при этом множество временных интервалов содержит первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, при этом отсутствует временной полуинтервал, разделяющий первый временной полуинтервал и второй временной полуинтервал, причем первый временной полуинтервал содержит первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, второй временной полуинтервал содержит второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика;
разделения первого и второго сегментов трафика на множество подсегментов, причем множество подсегментов содержит первый подсегмент и второй подсегмент, следующий за первым подсегментом;
измерения отношения уровня сигнала к совокупному уровню помех и шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное SINR;
измерения отношения уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR;
интерполирования между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента; и
предоставления пользователю, по меньшей мере, некоторых данных во множестве подсегментов.
43. Машиночитаемый носитель, содержащий команды, которые при выполнении, по меньшей мере, одним процессором в беспроводном терминале доступа побуждают терминал доступа выполнять этапы, на которых:
принимают множество временных интервалов, причем каждый временной интервал из множества временных интервалов содержит два временных полуинтервала, каждый временной полуинтервал содержит два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика, причем множество временных интервалов содержит первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, причем первый временной полуинтервал содержит первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, второй временной полуинтервал содержит второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика;
разделяют первый и второй сегменты трафика на множество подсегментов, причем множество подсегментов содержит первый подсегмент и второй подсегмент, следующий за первым подсегментом;
регулируют эквалайзер на первом пакете пилот-сигнала, чтобы получить первое множество отрегулированных коэффициентов отвода;
регулируют эквалайзер на втором пакете пилот-сигнала, чтобы получить второе множество отрегулированных коэффициентов отвода;
интерполируют между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить первый набор интерполированных коэффициентов отвода для первого подсегмента; и
корректируют первый подсегмент с использованием первого набора интерполированных коэффициентов отвода.
44. Машиночитаемый носитель по п.43, в котором:
первый временной полуинтервал и второй временной полуинтервал не разделяются никаким другим временным полуинтервалом; и
этапы дополнительно содержат предоставление пользователю, по меньшей мере, некоторых данных во множестве подсегментов.
45. Машиночитаемый носитель по п.44, в котором этап интерполирования содержит использование линейной интерполяции.
46. Машиночитаемый носитель по п.44, в котором этап интерполирования содержит использование кубической интерполяции.
47. Машиночитаемый носитель по п.44, в котором этап интерполирования содержит этап, на котором объединяют линейную интерполяцию с усреднением.
48. Машиночитаемый носитель по п.44, в котором этап разделения выполняется, чтобы второй подсегмент содержал первую часть из первого временного полуинтервала и вторую часть из второго временного полуинтервала.
49. Машиночитаемый носитель по п.44, в котором:
первый временной полуинтервал принадлежит первому временному интервалу;
второй временной полуинтервал принадлежит второму временному интервалу, следующему за первым временным интервалом; и
этап разделения выполняется, так чтобы второй подсегмент содержал первую часть из первого временного полуинтервала и вторую часть из второго временного полуинтервала.
50. Машиночитаемый носитель по п.44, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и этапы дополнительно содержат этапы, на которых:
интерполируют между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить второй набор интерполированных коэффициентов отвода для второго подсегмента;
корректируют второй подсегмент с использованием второго набора интерполированных коэффициентов отвода;
интерполируют между первым и вторым множествами отрегулированных коэффициентов отвода, чтобы получить третий набор интерполированных коэффициентов отвода для третьего подсегмента; и
корректируют третий подсегмент с использованием третьего набора интерполированных коэффициентов отвода.
51. Машиночитаемый носитель по п.44, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и этапы дополнительно содержат этапы, на которых:
корректируют второй подсегмент с использованием второго множества отрегулированных коэффициентов отвода; и
корректируют третий подсегмент с использованием первого множества отрегулированных коэффициентов отвода.
52. Машиночитаемый носитель по п.44, в котором этапы дополнительно содержат этапы, на которых:
определяют, когда в эквалайзере возникает смещение отвода между первым и вторым пакетами пилот-сигналов;
сдвигают коэффициенты эквалайзера в направлении, указанном смещением отвода, перед этапом регулировки эквалайзера приемника на втором пакете пилот-сигнала; и
сдвигают предысторию эквалайзера в направлении, указанном смещением отвода.
53. Машиночитаемый носитель по п.44, в котором этапы дополнительно содержат этапы, на которых:
измеряют отношение уровня сигнала к совокупному уровню помех и шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное SINR;
измеряют отношение уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR; и
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента.
54. Машиночитаемый носитель по п.53, в котором этапы дополнительно содержат этапы, на которых:
масштабируют выходной сигнал эквалайзера, соответствующий первому подсегменту, с помощью первого интерполированного SINR, чтобы получить первый набор масштабированных данных;
вычисляют первое логарифмическое отношение правдоподобия у первого набора масштабированных данных; и
декодируют первый подсегмент с использованием первого логарифмического отношения правдоподобия.
55. Машиночитаемый носитель по п.54, в котором этап интерполирования между первым измеренным SINR и вторым измеренным SINR содержит этап, на котором интерполируют в линейной области.
56. Машиночитаемый носитель по п.54, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и этапы дополнительно содержат этапы, на которых:
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить второе интерполированное SINR для второго подсегмента;
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить третье интерполированное SINR для третьего подсегмента;
масштабируют выходной сигнал эквалайзера, соответствующий второму подсегменту, с помощью второго интерполированного SINR, чтобы получить второй набор масштабированных данных;
масштабируют выходной сигнал эквалайзера, соответствующий третьему подсегменту, с помощью третьего интерполированного SINR, чтобы получить третий набор масштабированных данных;
вычисляют логарифмическое отношение правдоподобия у второго набора масштабированных данных; и
вычисляют логарифмическое отношение правдоподобия у третьего набора масштабированных данных.
57. Машиночитаемый носитель по п.54, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и этапы дополнительно содержат этапы, на которых:
масштабируют выходной сигнал эквалайзера, соответствующий второму подсегменту, с помощью второго измеренного SINR, чтобы получить второй набор масштабированных данных;
масштабируют выходной сигнал эквалайзера, соответствующий третьему подсегменту, с помощью первого измеренного SINR, чтобы получить третий набор масштабированных данных;
вычисляют логарифмическое отношение правдоподобия у второго набора масштабированных данных; и
вычисляют логарифмическое отношение правдоподобия у третьего набора масштабированных данных.
58. Машиночитаемый носитель, содержащий команды, которые при выполнении, по меньшей мере, одним процессором в беспроводном терминале доступа побуждают беспроводной терминал доступа выполнять этапы, на которых:
принимают множество временных интервалов, причем каждый временной интервал из множества временных интервалов содержит два временных полуинтервала, каждый временной полуинтервал содержит два сегмента трафика и пакет пилот-сигнала между двумя сегментами трафика, причем множество временных интервалов содержит первый временной полуинтервал и второй временной полуинтервал, следующий за первым временным полуинтервалом, при этом отсутствует временной полуинтервал, разделяющий первый временной полуинтервал и второй временной полуинтервал, причем первый временной полуинтервал содержит первый пакет пилот-сигнала и первый сегмент трафика, следующий за первым пакетом пилот-сигнала, второй временной полуинтервал содержит второй сегмент трафика и второй пакет пилот-сигнала, следующий за вторым сегментом трафика;
разделяют первый и второй сегменты трафика на множество подсегментов, причем множество подсегментов содержит первый подсегмент и второй подсегмент, следующий за первым подсегментом;
измеряют отношение уровня сигнала к совокупному уровню помех и шумов у первого пакета пилот-сигнала, чтобы получить первое измеренное SINR,
измеряют отношение уровня сигнала к совокупному уровню помех и шумов у второго пакета пилот-сигнала, чтобы получить второе измеренное SINR;
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить первое интерполированное SINR для первого подсегмента; и
предоставляют пользователю, по меньшей мере, некоторые данных во множестве подсегментов.
59. Машиночитаемый носитель по п.58, в котором этапы дополнительно содержат этапы, на которых:
масштабируют выходной сигнал эквалайзера, соответствующий первому подсегменту, с помощью первого интерполированного SINR, чтобы получить первый набор масштабированных данных;
вычисляют первое логарифмическое отношение правдоподобия у первого набора масштабированных данных; и
декодируют первый подсегмент с использованием второго логарифмического отношения правдоподобия.
60. Машиночитаемый носитель по п.59, в котором этап интерполирования между первым измеренным SINR и вторым измеренным SINR содержит этап, на котором интерполируют в линейной области.
61. Машиночитаемый носитель по п.59, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и этапы дополнительно содержат этапы, на которых:
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить второе интерполированное SINR для второго подсегмента;
интерполируют между первым измеренным SINR и вторым измеренным SINR, чтобы получить третье интерполированное SINR для третьего подсегмента;
масштабируют выходной сигнал эквалайзера, соответствующий второму подсегменту, с помощью второго интерполированного SINR, чтобы получить второй набор масштабированных данных;
масштабируют выходной сигнал эквалайзера, соответствующий третьему подсегменту, с помощью третьего интерполированного SINR, чтобы получить третий набор масштабированных данных;
вычисляют логарифмическое отношение правдоподобия у второго набора масштабированных данных; и
вычисляют логарифмическое отношение правдоподобия у третьего набора масштабированных данных.
62. Машиночитаемый носитель по п.59, в котором множество подсегментов дополнительно содержит третий подсегмент, предшествующий первому подсегменту, и этапы дополнительно содержат этапы, на которых:
масштабируют выходной сигнал эквалайзера, соответствующий второму подсегменту, с помощью второго измеренного SINR, чтобы получить второй набор масштабированных данных;
масштабируют выходной сигнал эквалайзера, соответствующий третьему подсегменту, с помощью первого измеренного SINR, чтобы получить третий набор масштабированных данных;
вычисляют логарифмическое отношение правдоподобия у второго набора масштабированных данных; и
вычисляют логарифмическое отношение правдоподобия у третьего набора масштабированных данных.
| US 6175588 В1, 16.01.2001 | |||
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| US 5175747 А, 29.12.1992 | |||
| DE 19926504 А1, 13.06.2001 | |||
| Устройство для правки серповидной металлической ленты | 1981 |
|
SU978969A1 |
| Штамм вируса иммунного дефицита человека для приготовления диагностических систем | 1990 |
|
SU1703686A1 |
| БЕЗРИГЕЛЬНЫЙ БЕСКАПИТЕЛЬНЫЙ ЖЕЛЕЗОБЕТОННЫЙ КАРКАС ЗДАНИЯ | 2001 |
|
RU2247812C2 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ получения 2-, 2,3- или 2,3,6-алкилхинолинов | 1990 |
|
SU1816759A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| ЕР 1443679 А2, 04.08.2004 | |||
| RU 2002119005 А, 10.02.2004. | |||

