Область техники, к которой относится изобретение
Изобретение относится, в общем, к коррекции принятого сигнала и более конкретно к гибридной коррекции с решающей обратной связью.
Уровень техники
При передаче цифровой информации обычно используется модулятор, который отображает цифровую информацию в аналоговых сигналах. Это отображение обычно выполняется на блоках битов, содержащихся в информационной последовательности, подлежащей передаче. Сигналы могут отличаться друг от друга амплитудой, фазой, частотой или их комбинацией. Затем данная информация передается как соответствующий сигнал. Процесс отображения из цифровой области в аналоговую область называется модуляцией.
В беспроводной системе связи модулированный сигнал передается по радиоканалу. Затем приемник демодулирует принятый сигнал, чтобы извлечь из него исходную цифровую информационную последовательность. В приемнике переданный сигнал подвергается воздействию линейных искажений, вводимых каналом, а также внешнего аддитивного шума и помех. Характеристики канала обычно изменяются во времени, и поэтому они не известны априори для приемника. Приемники компенсируют искажения и помехи, внесенные каналом, различными способами. Один способ компенсации искажений и уменьшения помех в принятом сигнале заключается в применении эквалайзера (корректора). Коррекция обычно включает в себя методы, используемые для уменьшения эффектов искажения в канале связи. Из принятого сигнала эквалайзер вырабатывает оценки исходной цифровой информации.
Известные способы коррекции построены на основе предположений, касающихся принятого сигнала. Такие предположения обычно не корректны для различных сценариев кодирования, модуляции и передачи, и поэтому работа этих эквалайзеров во многих условиях бывает неудовлетворительной. Кроме того, известные эквалайзеры с использованием решающей обратной связи часто страдают от эффектов распространения ошибок, которые усиливают действие изолированных ошибок решения. Также, в процессе решающей обратной связи используются жесткие решения для каждого символа и не учитывается вероятность того, что решение символа правильное.
Таким образом, существует потребность в способе коррекции, который бы уменьшал линейные искажения в принятом сигнале в широком спектре рабочих условий. Также существует потребность в уменьшении распространения ошибок в эквалайзере с решающей обратной связью. И еще существует потребность в обеспечении степени правдоподобия для процесса с решающей обратной связью.
Краткое описание чертежей
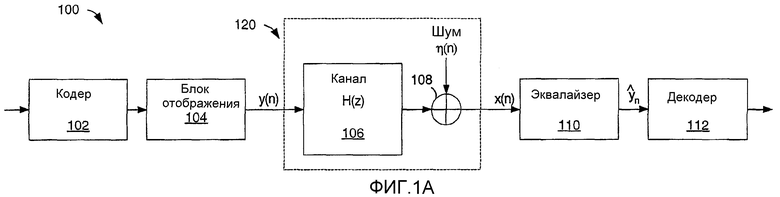
Фиг.1А изображает структурную схему компонентов системы связи,
фиг.1В детально изображает часть системы связи по фиг.1А,
фиг.2 изображает концептуальную модель эквалайзера с решающей обратной связью в системе связи,
фиг.3 изображает структурную схему эквалайзера с решающей обратной связью, подобного изображенному на фиг.2,
фиг.4 изображает математическую модель ограничителя уровня символа,
фиг.5 изображает алгоритм оптимизации коэффициентов фильтров в эквалайзере с решающей обратной связью,
фиг.6 изображает алгоритм адаптивной фильтрации по методу наименьших средних квадратов для оптимизации коэффициентов фильтров в эквалайзере с решающей обратной связью,
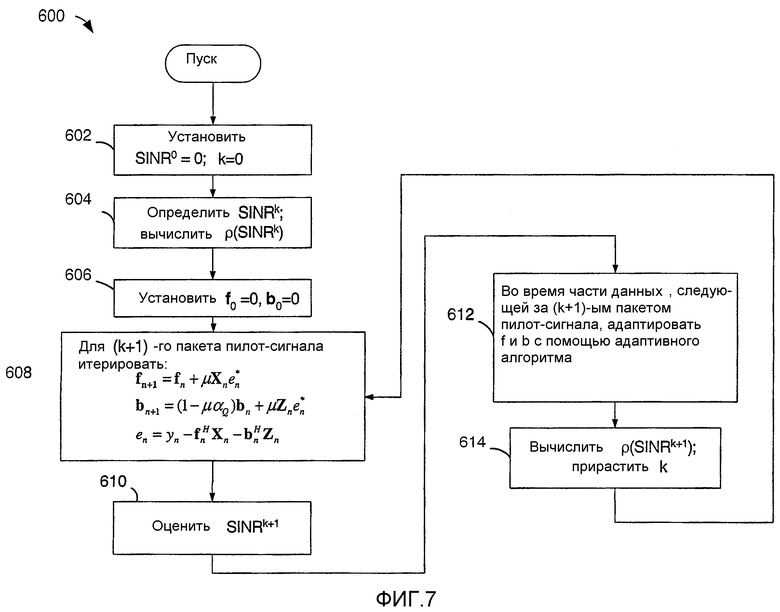
фиг.7 изображает алгоритм адаптивной фильтрации по методу наименьших средних квадратов для оптимизации коэффициентов фильтров в эквалайзере с решающей обратной связью для системы с использованием периодического пакетного пилот-сигнала,
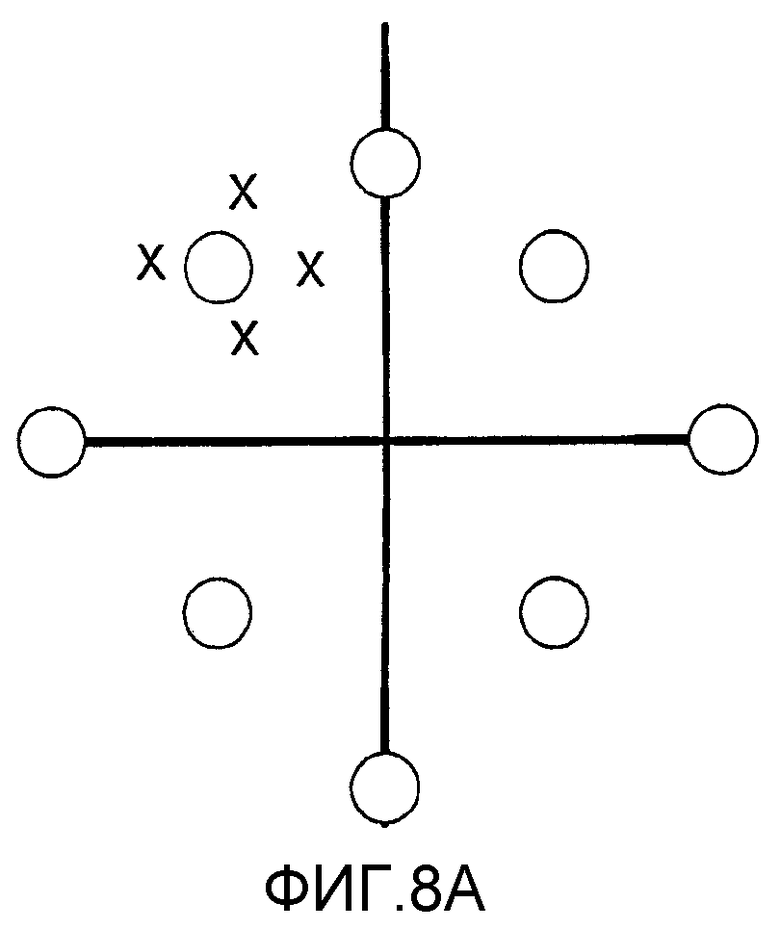
фиг.8А изображает отображение совокупности для 8-позиционной фазовой манипуляции (PSK),
фиг.8В иллюстрирует области сетки, использованные для решений мягкого ограничителя, наложенные на отображение совокупности на фиг.8А,
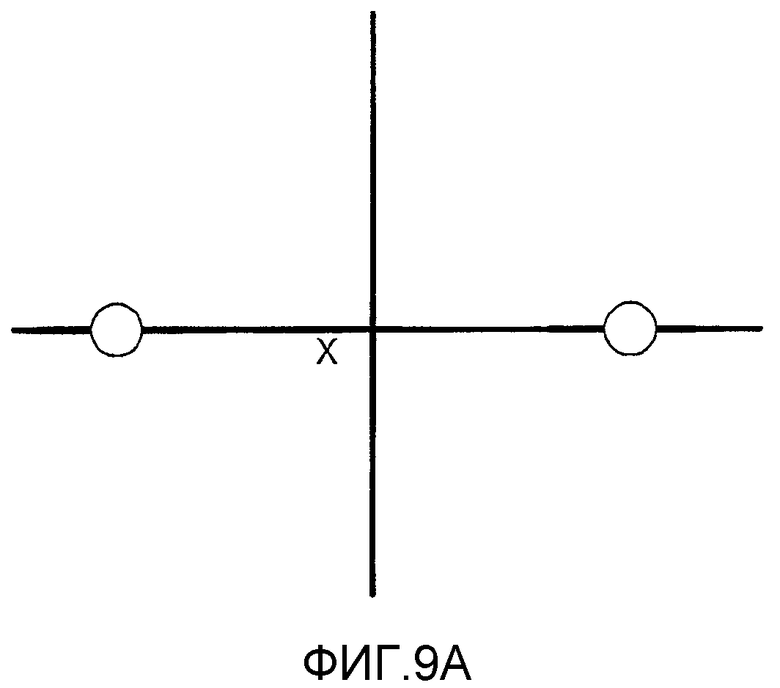
фиг.9А изображает отображение совокупности для случая бинарной фазовой манипуляции (BPSK), или 2-PSK,
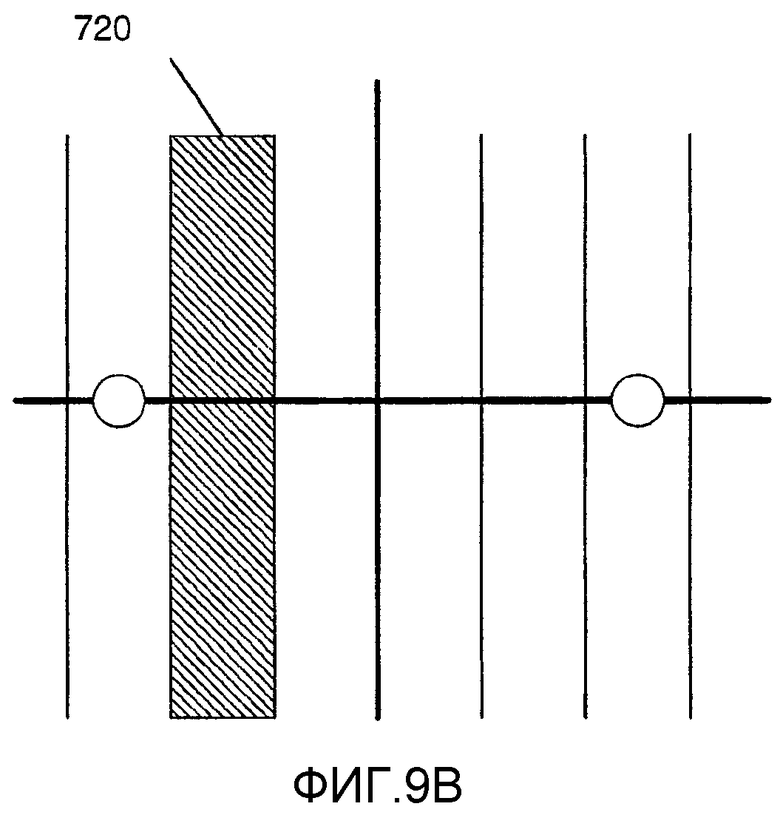
фиг.9В иллюстрирует области сетки, использованные для решений мягкого ограничителя, наложенные на отображение совокупности на фиг.9А,
фиг.10 изображает эквалайзер с решающей обратной связью, в котором реализуется процесс решения "с мягким ограничением",
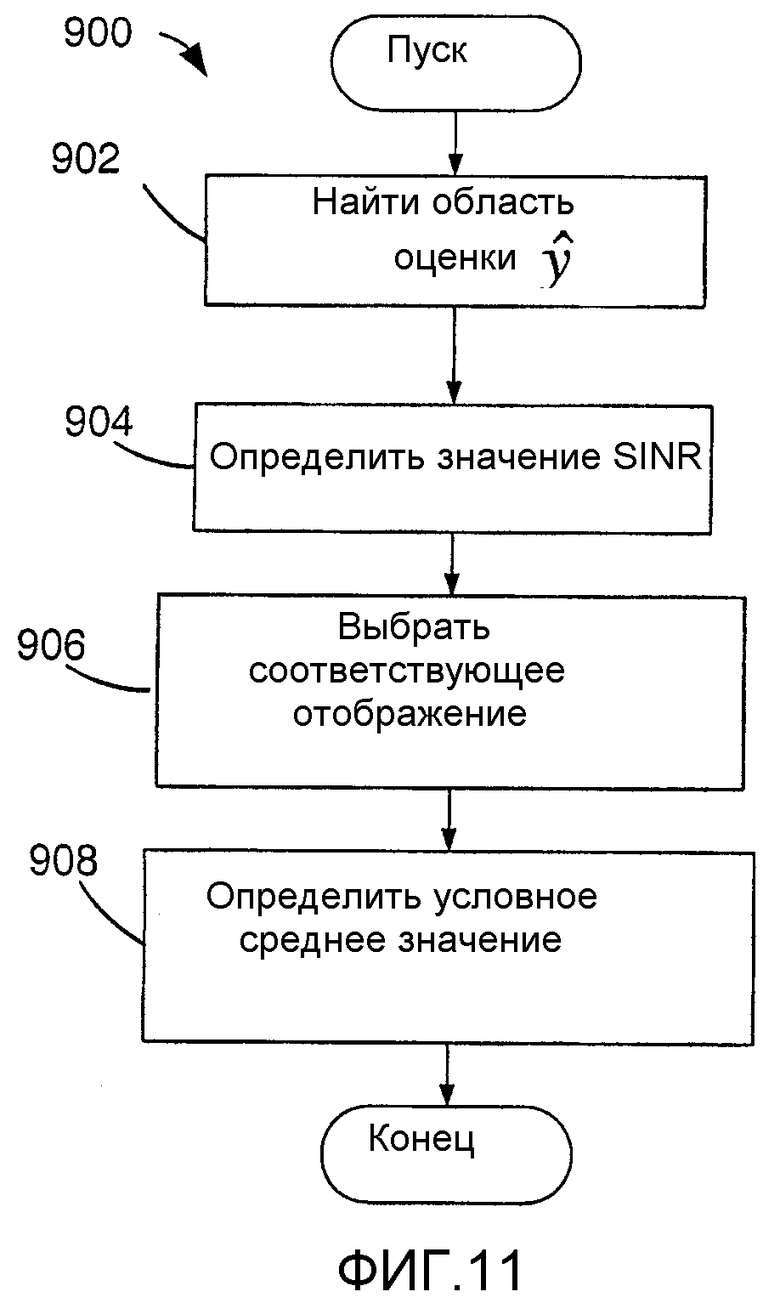
фиг.11 изображает процесс решения "с мягким ограничением",
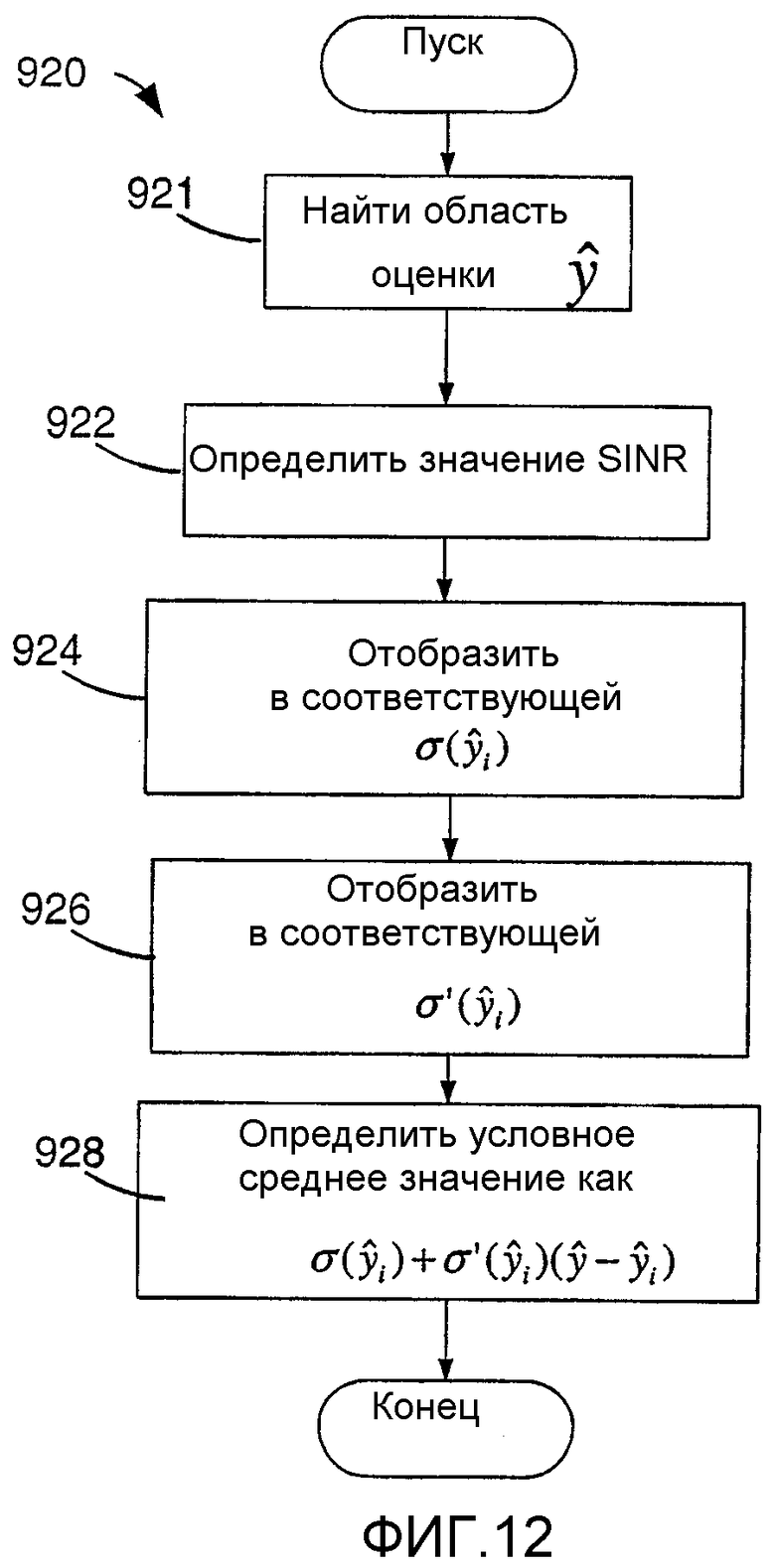
фиг.12 изображает процесс решения "с мягким ограничением", в котором применяется вычисление ряда Тейлора,
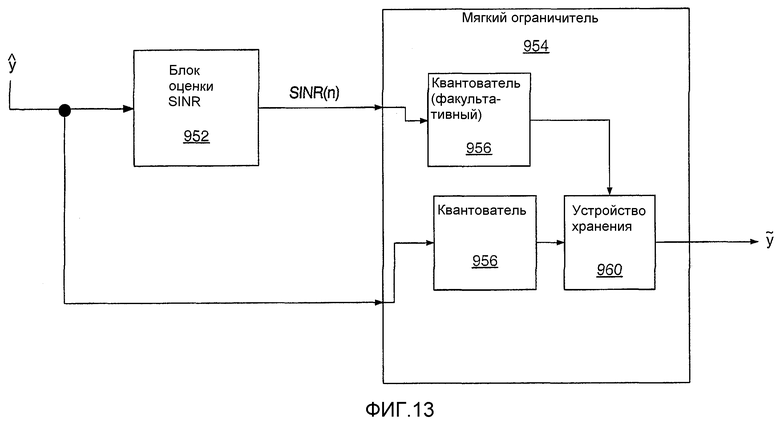
фиг.13 изображает структурную схему "мягкого ограничителя",
фиг.14 изображает структурную схему "мягкого ограничителя" с применением вычисления ряда Тейлора.
Подробное описание изобретения
В данном контексте слово "примерный" используется в смысле "служащий в качестве примера, случая или иллюстрации". Любой вариант, описанный как "примерный", не следует обязательно считать предпочтительным или имеющим преимущество по сравнению с другими вариантами.
На фиг.1А показана часть компонентов системы связи 100. В дополнение к проиллюстрированным блокам в систему связи можно ввести другие блоки и модули. Биты, вырабатываемые источником (не показан), кадрируются, кодируются и затем преобразуются в символы в сигнальной совокупности. Последовательность двоичных чисел, сформированная источником, называется информационной последовательностью. Информационная последовательность кодируется кодером 102, который выдает битовую последовательность. Выходной сигнал кодера 102 подается в блок 104 отображения, который служит в качестве интерфейса с каналом связи. Блок 104 отображения отображает выходную последовательность кодера в символах y(n) в комплексной оцененной сигнальной совокупности. Дальнейшая обработка передачи, включая блоки модуляции, а также канал связи и обработка аналогового приемника смоделированы секцией 120.
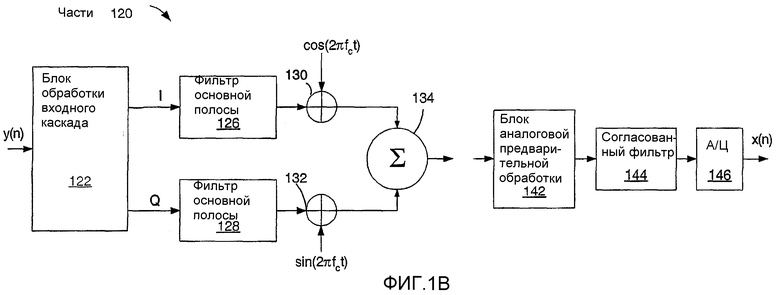
На фиг.1В показаны некоторые детали, входящие в состав секции 120 на фиг.1А. Как видно на фиг.1В, комплексные символы y(n) модулированы на импульсе аналогового сигнала, а полученный комплексный модулирующий сигнал синусоидально модулирован на синфазной и квадратурной ветвях несущего сигнала. Полученный аналоговый сигнал передается ВЧ антенной (не показана) по каналу связи. Таким образом можно использовать целый ряд схем модуляции, например, M-арную фазовую манипуляцию (М-PSK), 2M-арную квадратурную амплитудную модуляцию (2M QAM) и т.п.
Каждая схема модуляции имеет соответствующую "сигнальную совокупность", которая отображает один или несколько битов в уникальном комплексном символе. Например, при модуляции типа 4-PSK два закодированных бита отображаются одним из четырех возможных комплексных значений {1,i,-1,-i}. Следовательно, каждый комплексный символ y(n) может принимать четыре возможных значения. В общем, для M-PSK log2M кодированных битов отображаются одним из М возможных комплексных значений, лежащих на единичном круге комплекса.
Также на фиг.1В показано, что в приемнике аналоговый сигнал подвергается понижающему преобразованию, фильтрации и выборке, например, с подходящим кратным частоты Найквиста. Полученные выборки обрабатываются эквалайзером 110, который корректирует искажения сигнала и другой шум и помехи, внесенные каналом, как смоделировано секцией 120. Эквалайзер 110 выдает оценки переданных символов y(n). Эти оценки символов затем обрабатываются декодером для определения исходных информационных битов, т.е. битов источника, которые были введены в кодер 102.
Комбинация импульсного фильтра, I-Q модулятора, канала и аналогового процессора на входном каскаде приемника, показанная на фиг.1А и 1В, моделируется линейным фильтром 106, имеющим импульсную характеристику {h k } и z-преобразование H(z), в котором введенные каналом помехи и шум моделируются как аддитивный белый гауссов шум (АБГШ).
На фиг.1В детально изображена секция 120, содержащая блок обработки 122 входного каскада, подсоединенный к фильтрам 126 и 128 основной полосы для обработки синфазной (I) и квадратурной (Q) компонент, соответственно. Каждый фильтр 126, 128 основной полосы далее подключен к умножителю для умножения на соответствующую несущую. Полученные сигналы затем суммируются в суммирующем блоке 134 и передаются по каналу связи в приемник. В приемнике блок 142 аналоговой предварительной обработки принимает переданный сигнал, который обрабатывается и подается в согласованный фильтр 144. Выходной сигнал согласованного фильтра 144 затем подается в аналого-цифровой преобразователь (A/Ц) 146. Следует отметить, что можно использовать и другие модули в соответствии с конструктивными и операционными критериями. Компоненты и элементы на фиг.1А и 1В представлены в целях обеспечения понимания следующего описания и не предназначены для полного описания системы связи.
Как было описано выше, последовательности передаваемых символов обозначены как {y(n)}. Для целей данного описания предположим, что символы {y(n)} нормированы по средней единице энергии, т.е. E|yn|2=1. Если выходной сигнал канала подвергнуть фильтрации и выборке с частотой символов (которая может быть, хотя и не обязательно, равна частоте Найквиста), то выходной сигнал канала будет:

где ηт - белый гауссов шум с дисперсией (E
s
/N
0
)
-1. Эквалайзер обычно реализуется как линейный фильтр с коэффициентами {f
k
} и характеризуется z-преобразованием F(z). Пусть  означает выходной сигнал эквалайзера, где определяется как:
означает выходной сигнал эквалайзера, где определяется как:
где G(z)=F(z)H(z) и

Следует отметить, что второй член в квадратных скобках […] в ур. (2) представляет межсимвольные помехи (ISI) и шум. Первый член ур. (2) соответствует помехам, связанным с прошлыми символами, а второй член соответствует помехам, связанным с будущими символами. Первый член часто называют "причинными" ISI, а второй член часто называют "анти-причинными" ISI. Если разработчик предполагает, что прошлые символы были обнаружены корректно, то член причинных ISI можно удалить. В идеальном случае, если эквалайзеру известны символы совокупности y
n-1
, y
n-2
,K, т.е. символы совокупности, переданные до момента времени n, при определении оценки эквалайзер может удалить часть межсимвольных помех путем вычитания первого члена […] ур. (2). Однако в практических системах эквалайзеру известны только ранее сформированные оценки символов, такие как  ,
,  ,K. Если помехи и шум достаточно малы, то можно ожидать, что эти решения символов на оценке дадут исходный переданный символ yn совокупности. Устройство, выполняющее такие решения для символов, называется "ограничитель" и его работа обозначена как σ(.). При этом приемник может сформировать оценку причинных ISI с помощью последовательности решений для символов из ограничителя и вычесть эту оценку из выходного сигнала эквалайзера, чтобы получить:
,K. Если помехи и шум достаточно малы, то можно ожидать, что эти решения символов на оценке дадут исходный переданный символ yn совокупности. Устройство, выполняющее такие решения для символов, называется "ограничитель" и его работа обозначена как σ(.). При этом приемник может сформировать оценку причинных ISI с помощью последовательности решений для символов из ограничителя и вычесть эту оценку из выходного сигнала эквалайзера, чтобы получить:
в предположении, что σ(
 )≈y
n-k. В этом состоит основной принцип коррекции с обратной решающей связью, при которой причинные ISI удаляются посредством причинной фильтрации решений для символов, выполненных ограничителем уровня символов, оперирующим на выходе эквалайзера.
)≈y
n-k. В этом состоит основной принцип коррекции с обратной решающей связью, при которой причинные ISI удаляются посредством причинной фильтрации решений для символов, выполненных ограничителем уровня символов, оперирующим на выходе эквалайзера.
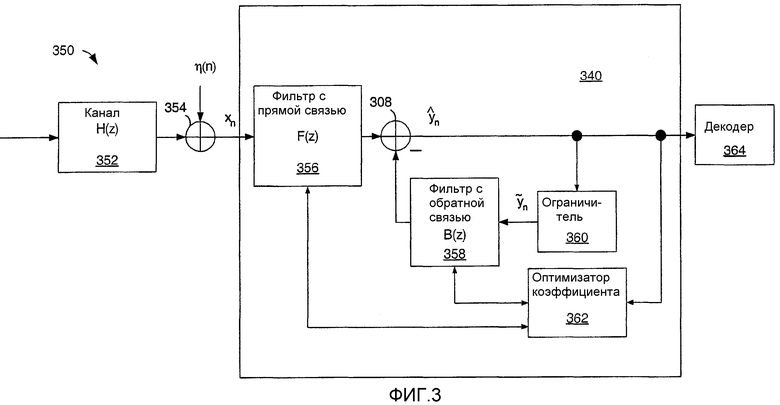
На фиг.3 показана система связи 350, в которой используется эквалайзер 340 с решающей обратной связью (ЭРОС). Система связи 350 смоделирована таким образом, что она имеет эквивалентный линейный канал 352, который фильтрует последовательность символов y
n. Шум и помехи, ηn, добавляются в суммирующем блоке 354, и выходной сигнал xn означает выборки сигнала, полученные после обработки входным каскадом и выборки в приемнике. ЭРОС 340 обрабатывает x
n и фильтрует x
n, чтобы сформировать оценку . ЭРОС 340 смоделирован с линейным фильтром 356 прямой связи и линейным фильтром 358 обратной связи. Фильтр 356 прямой связи имеет коэффициенты отводов, обозначенные как {fk}, и применяет z-преобразование F(z). ЭРОС 340 также содержит чисто причинный фильтр 358 обратной связи, подключенный к ограничителю 360, образующий петлю обратной связи, которая формирует оценку причинных ISI. Иными словами, фильтр 358 обратной связи удаляет из оценки настоящего символа часть ISI, вызванную ранее обнаруженными символами. Оценка причинных ISI из фильтра 358 обратной связи подается в суммирующий блок 308, который вычитает оценку причинных ISI из выходного сигнала фильтра 356 прямой связи. Полученный выходной сигнал суммирующего блока 308 является выходным сигналом  эквалайзера. Выходной сигнал
эквалайзера. Выходной сигнал  эквалайзера также является оценкой переданного символа уn и подается в декодер 364 для определения исходной информационной последовательности.
эквалайзера также является оценкой переданного символа уn и подается в декодер 364 для определения исходной информационной последовательности.
Ограничитель 360 обрабатывает выходной сигнал эквалайзера из суммирующего блока 308 и в ответ принимает решение относительно исходного символа yn. Выходной сигнал ограничителя 360 затем подается в чисто причинный фильтр 358 обратной связи. Фильтр 356 прямой связи также называется "ФПС". Фильтр 358 обратной связи также называется "ФОС". В ЭРОС оптимизация коэффициентов фильтров фильтра 356 прямой связи и фильтра 358 обратной связи прямо влияет на работу эквалайзера. Устройство, которое выполняет данную оптимизацию, на фиг.3 обозначено как оптимизатор 362 коэффициентов. Существует целый ряд путей оптимизации коэффициентов фильтров.
Традиционно коэффициенты ФПС и ФОС оптимизируются в неявном предположении, что решения ограничителя для символов совершенно надежны и что причинные ISI, т.е. помехи от прошлых символов, совершенно удаляются с помощью ФОС. При этом предположении коэффициенты ФПС оптимизируются таким образом, чтобы член остаточных помех и шума в ур. (3) был малым. Более точно, z-преобразование ФПС, F(z), оптимизируется так, что в ур. (3) приближается к y
n в среднеквадратическом смысле.
На практике ФПС и ФОС часто реализуются фильтрами с конечной импульсной характеристикой (ФКИХ) и во время начального периода тренировки/преамбулы/адаптации ФПС и ФОС "тренируются" на символах пилот-сигнала в предположении совершенной работы ограничителя, т.е. σ(
)=y
n. Это реализуется посредством обхода ограничителя и обратной подачи локально сформированных (и поэтому правильных) символов пилот-сигнала, вместо ограниченных (а значит возможно ошибочных) решений для символов пилот-сигнала, в ФОС. Можно применить целый ряд алгоритмов для оптимизации коэффициентов фильтров во время периода тренировки, включая адаптивные алгоритмы, такие как алгоритм наименьших средних квадратов (НСК), рекурсивный алгоритм наименьших квадратов (РНК), алгоритм прямого обращения матриц и другие. После завершения тренировочного периода включается ограничитель 360, и ограниченные символы данных подаются обратно через ФОС.
Обычные алгоритмы оптимизации ЭРОС вносят ряд потенциальных проблем. В системах с применением сильного кодирования решения ограничителя часто имеют высокую частоту появления ошибочных символов (ЧОС). Например, в системе с применением совокупности среднего размера, такой как 16-QAM, и низкоскоростного турбокода, например, со скоростью 1/3, при работе на уровне частоты появления ошибочных пакетов величиной 1% часто встречается ЧОС 25% или выше. С другой стороны, коэффициенты ФПС и ФОС в ЭРОС обычно оптимизируются с неверным предположением, что решения ограничителя совершенно надежны.
Кроме того, коэффициенты ФПС и ФОС оптимизируются в предположении, что причинные ISI совершенно удалены. В результате анти-причинные ISI уменьшаются за счет более высоких причинных ISI. Обычные алгоритмы оптимизации ЭРОС в смысле представленных уравнений (особенно ур. (1)-(3)) приводят к значениям g k, которые имеют тенденцию быть больше для k>0, но меньше для k<0. Однако, когда ЧОС ограничителя не является пренебрежимо малой, ошибочные решения для символов заражают ФОС и после этого вычитаются ошибочно. Когда значения gk для k>0 большие, возрастают остаточные помехи, а это может приводить к дальнейшим ошибкам ограничителя на последующих символах. Такое явление называется распространением ошибок.
Попытки уменьшить распространение ошибок включают в себя обратную подачу ограниченных символов пилот-сигнала во время тренировки, в отличие от тренировки ФПС и ФОС посредством обратной подачи локально генерированных (а значит правильных) выборок пилот-сигнала. Ограниченные символы пилот-сигнала время от времени бывают ошибочными, что вынуждает соответственно корректироваться ФПС и ФОС. Однако этот способ также не лишен проблем. Ограниченные символы пилот-сигнала и ограниченные символы данных могут иметь очень разные частоты появления ошибок, так как символы пилот-сигнала обычно передаются через BPSK, т.е. 2-PSK (или другую меньшую совокупность), а символы данных обычно передаются через совокупность большего размера. В результате, ЧОС символов пилот-сигнала и символов данных могут быть совершенно разными. В этом случае коэффициенты ФПС и ФОС оптимизируются на основании ограниченных символов пилот-сигнала, и эффект этих коэффициентов в обработке символов данных приводит к работе ниже оптимального уровня.
Эти проблемы можно решить посредством оптимизации коэффициентов ФПС и ФОС в целях учета ошибок, обусловленных ограничителем 360 на фиг.3. Иными словами, оптимизатор 362 коэффициентов модифицируют, признавая, что из-за ошибок ограничителя причинные ISI невозможно удалить совершенно. Этот принцип отличается от известных методов, в которых неявно предполагается, что ограничитель свободен от ошибок, и поэтому причинные ISI совершенно удаляются.
Теория, положенная в основу одного варианта, заключается в моделировании работы ограничителя с помощью независимого, одинаково распределенного (н.о.р.) "канала", обозначенного Q(
 ). Предполагается, что этот "канал" не зависит от шумового процесса, обозначенного как {η
n
} в ур. (0), и передаваемой последовательности символов, обозначенной как {y
n
}. Этот "канал" полностью характеризуется его условной плотностью Q(
), где
). Предполагается, что этот "канал" не зависит от шумового процесса, обозначенного как {η
n
} в ур. (0), и передаваемой последовательности символов, обозначенной как {y
n
}. Этот "канал" полностью характеризуется его условной плотностью Q(
), где  и y соответственно означают выходной сигнал ограничителя и действительный переданный символ. Допустим, что канал является причиной ошибочных символов в ФОС. На практике ошибочные символы возникают в пакетах, потому что ошибка ограничителя на текущем символе подразумевает, что следующие символы могут быть неправильно ограничены с более высокой вероятностью. В рассматриваемой упрощенной модели ограничителя предполагается, что ошибки ограничителя являются н.о.р.
и y соответственно означают выходной сигнал ограничителя и действительный переданный символ. Допустим, что канал является причиной ошибочных символов в ФОС. На практике ошибочные символы возникают в пакетах, потому что ошибка ограничителя на текущем символе подразумевает, что следующие символы могут быть неправильно ограничены с более высокой вероятностью. В рассматриваемой упрощенной модели ограничителя предполагается, что ошибки ограничителя являются н.о.р.
На фиг.2 показана концептуальная модель 300 системы связи с эквалайзером с решающей обратной связью. Символы, переданные по каналу связи 302, смоделированному передаточной функцией H(z), искажены аддитивным шумом в суммирующем блоке 304. Результирующий сигнал фильтруется в ФПС 306. Оценка исходного переданного символа формируется путем вычитания вектора ошибки члена в суммирующем блоке 308. Оценка исходного переданного символа передается в декодер 316. Вектор ошибки формируется причинным фильтром 310 обратной связи, с передаточной функцией B(z), который фильтрует выходные сигналы "канала"  314. Вектор ошибки, сформированный фильтром 310 обратной связи, представляет оценку причинных ISI, присутствующих в выходном сигнале ФПС 306. "Канал" копирует статистическое поведение ограничителя 360 на фиг.3, т.е. статистическое соотношение между входным и выходным сигналами канала 314 идентично статистическому соотношению между переданным символом уn и соответствующим выходным сигналом
314. Вектор ошибки, сформированный фильтром 310 обратной связи, представляет оценку причинных ISI, присутствующих в выходном сигнале ФПС 306. "Канал" копирует статистическое поведение ограничителя 360 на фиг.3, т.е. статистическое соотношение между входным и выходным сигналами канала 314 идентично статистическому соотношению между переданным символом уn и соответствующим выходным сигналом  ограничителя 360. Оптимизатор 320 коэффициента осуществляет оптимизацию коэффициентов фильтров из ФПС 306 и ФОС 310. Следует отметить, что основное отличие между фиг.3 и фиг.2 заключается в замене ограничителя 360 концептуальной моделью "канала"
ограничителя 360. Оптимизатор 320 коэффициента осуществляет оптимизацию коэффициентов фильтров из ФПС 306 и ФОС 310. Следует отметить, что основное отличие между фиг.3 и фиг.2 заключается в замене ограничителя 360 концептуальной моделью "канала"  314.
314.
Как отмечалось выше, ограничитель смоделирован на фиг.2 посредством выбора "канала"  чтобы смоделировать статистическое поведение действительного ограничителя без учета статистической зависимости ошибок ограничителя во времени. Так как действительный ограничитель оперирует с выходным сигналом эквалайзера, соответствующая маргинальная статистика содержит остаточные помехи. Пусть SINR представляет отношение сигнал/помеха+шум в выходном сигнале эквалайзера, т.е. в выходном сигнале суммирующего блока 308 на фиг.2. Допустим, что остаточные помехи и шум в выходном сигнале эквалайзера можно смоделировать как нулевую среднюю комплексную гауссову случайную переменную Z с независимыми действительной и мнимой частями, каждая с дисперсией σ2, где
чтобы смоделировать статистическое поведение действительного ограничителя без учета статистической зависимости ошибок ограничителя во времени. Так как действительный ограничитель оперирует с выходным сигналом эквалайзера, соответствующая маргинальная статистика содержит остаточные помехи. Пусть SINR представляет отношение сигнал/помеха+шум в выходном сигнале эквалайзера, т.е. в выходном сигнале суммирующего блока 308 на фиг.2. Допустим, что остаточные помехи и шум в выходном сигнале эквалайзера можно смоделировать как нулевую среднюю комплексную гауссову случайную переменную Z с независимыми действительной и мнимой частями, каждая с дисперсией σ2, где

Маргинальная статистика определяется эквивалентным каналом Q(
), в котором

где σ() означает функцию ограничения по минимальному расстоянию, определенную как

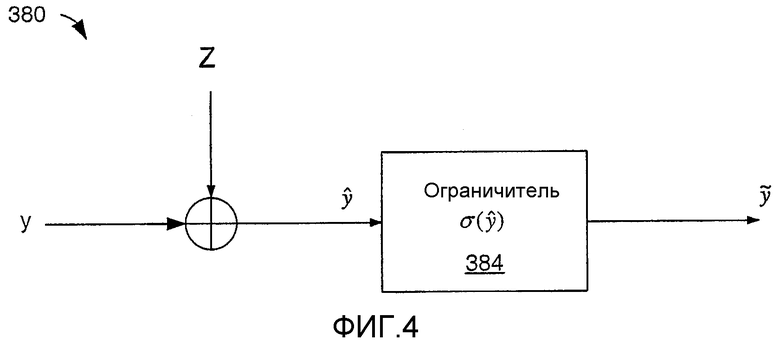
и Z в ур. (7) является нулевой средней комплексной гауссовой случайной переменной, моделирующей остаточные помехи со свойствами, описанными выше. На фиг.4 показан канал смоделированный согласно представленным выше предположениям и уравнениям. В частности, математическое описание  314 на фиг.2 показано в виде системы 380. Входной сигнал в ограничитель 384 обозначен как
314 на фиг.2 показано в виде системы 380. Входной сигнал в ограничитель 384 обозначен как  и смоделирован как переданный символ y, искаженный аддитивным шумом и помехами. Шум и помехи смоделированы комплексной гауссовой случайной переменной Z. Ограничитель 384 применяет функцию ограничения по минимальному расстоянию, как описано в ур. (8), чтобы получить выходной сигнал ограничителя, обозначенный
и смоделирован как переданный символ y, искаженный аддитивным шумом и помехами. Шум и помехи смоделированы комплексной гауссовой случайной переменной Z. Ограничитель 384 применяет функцию ограничения по минимальному расстоянию, как описано в ур. (8), чтобы получить выходной сигнал ограничителя, обозначенный  Совместная статистика, объединяющая и y, составляет полное математическое описание модели канала
Совместная статистика, объединяющая и y, составляет полное математическое описание модели канала  Конструкция канала показанная на фиг.4, является новой и отличается от известных методов тем, что шум Z может иметь ненулевую дисперсию. В известных методах неявно предполагается, что Z тождественно равно нулю. Следовательно, в данной модели ограничителя предполагается наличие ошибок решения, в отличие от известных методов, в которых ограничитель предположительно лишен ошибок.
Конструкция канала показанная на фиг.4, является новой и отличается от известных методов тем, что шум Z может иметь ненулевую дисперсию. В известных методах неявно предполагается, что Z тождественно равно нулю. Следовательно, в данной модели ограничителя предполагается наличие ошибок решения, в отличие от известных методов, в которых ограничитель предположительно лишен ошибок.
Пусть на фиг.2 f
Q и b
Q означают коэффициенты ФПС и ФОС, выбранные таким образом, чтобы минимизировать среднеквадратическую ошибку между переданным символом yn (вход канала 302) и оценкой символа (выходом суммирующего блока 308). Иными словами, коэффициенты f
Q и b
Q являются оптимальной винеровской минимальной среднеквадратической ошибкой (MMSE). По причинам, которые будут описаны ниже, эти коэффициенты называются "винеровскими коэффициентами гибридного ЭРОС". Коэффициенты f
Q и bQ можно определить посредством стандартной оптимизации Винера-Хопфа с применением следующего уравнения:

где RF означает ковариацию содержаний ФПС, RB - ковариацию содержаний ФОС, RF,B - взаимную ковариацию содержаний ФПС и ФОС и pF - взаимную ковариацию между содержанием ФПС и переданным символом. Эти ковариации и взаимные ковариации зависят от линейного канала 302, описанного H(z). Допустим, что символы в Y, т.е. совокупности передачи, используются с равной вероятностью, тогда ρQ определяется как

где |Y| означает количество элементов Y, т.е. количество возможных символов в совокупности передачи. Следовательно, для данного и канала с Z-преобразованием H(z) коэффициенты MMSE f
Q и b
Q определяются с помощью ур. (4) и (5).
Напомним, что определялся согласно ур. (6) и (7) с применением гипотетического значения SINR на выходе эквалайзера. Применение ур. (4) и (5) приводит к получению коэффициентов MMSE f
Q и b
Q. Когда эти значения коэффициентов ФПС и ФОС используются в ФПС 306 и ФОС 310 на фиг.2, результирующее SINR на выходе эквалайзера может отличаться от исходного гипотетического значения SINR. Следовательно, гипотетическое значение SINR может быть состоятельным или несостоятельным. Однако состоятельное значение SINR, а значит и состоятельный набор коэффициентов MMSE f
Q и b
Q, можно найти путем итерации, т.е. использования вновь найденного значения SINR для определения нового "канала" нахождения нового набора соответствующих коэффициентов MMSE и т.д. Этот итеративный процесс можно схематически представить следующим образом:

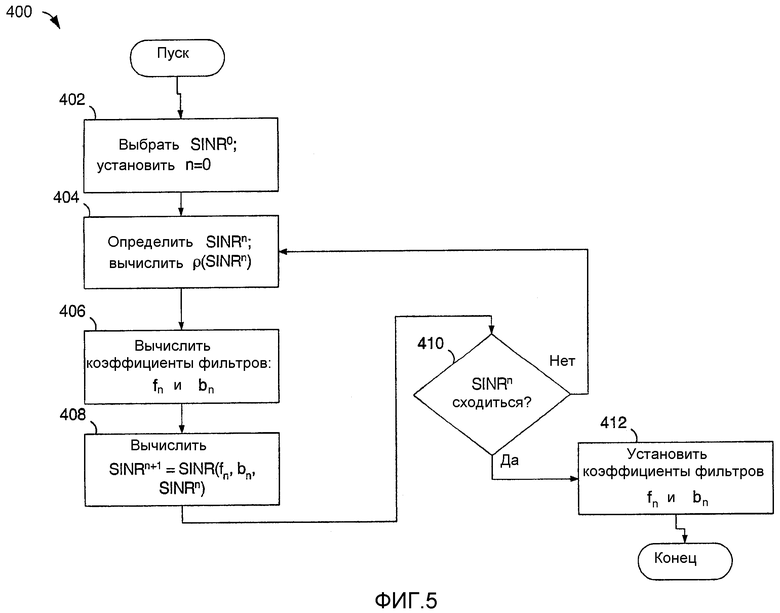
В частности, итеративный алгоритм можно использовать для вычисления винеровского гибридного ЭРОС. Алгоритм данного варианта проиллюстрирован на фиг.5. Процесс 400 начинается с установки n=0 на этапе 402 и произвольного выбора SINR 0. Этот процесс продолжается определением SINR n и вычислением ρ(SINR n ) с помощью ур. (5), (6) и (7) на этапе 404. Коэффициенты f n ,b n фильтров вычисляются на этапе 406 с помощью ур. (4). Согласно данному варианту изобретения, процесс вычисляет SINR n+1 = SINR(f n ,b n ,SINR n ) на этапе 408. Следует отметить, что SINR(f,b,x) означает SINR на выходе эквалайзера с коэффициентами f ФПС и коэффициентами b ФОС и каналом Q(.|.) ограничителя с SINR х. Канал ограничителя определяется с помощью ур. (6) и ур. (7). Если процесс сходится в блоке решения 410, то обработка продолжается на этапе 412 установкой коэффициентов фильтров. Если процесс не сходится, обработка возвращается к этапу 404.
Следует отметить, что, как описано в итеративном алгоритме на фиг.5, значение SINR0 можно выбирать произвольно. Два предела, SINR 0 =0, SINR 0 =∞, соответствуют запуску с абсолютно ненадежным ограничителем или совершенным ограничителем, соответственно.
Следует отметить, что ρ представляет корреляцию между выходным сигналом ограничителя и действительно переданным символом, и ρ, как таковая, является функцией SINR выходного сигнала эквалайзера. Если выходной сигнал эквалайзера очень шумный, то эта корреляция низкая. В этом случае решения для символов ограничителя в основном ненадежные, и точная оценка причинных ISI невозможна. Как ожидается, в этом случае алгоритм на фиг.5 сходится к коэффициентам ФПС и ФОС, которые близко напоминают коэффициенты линейного эквалайзера, т.е. эквалайзера, в котором коэффициенты ФОС ограничены нулем. С другой стороны, когда выходной сигнал эквалайзера почти бесшумный, корреляция ограничителя ρ имеет тенденцию приближаться к единице. В этом случае алгоритм на фиг.5 сходится к коэффициентам ФПС и ФОС, которые близко напоминают коэффициенты "идеального" ЭРОС, т.е. ЭРОС с совершенно надежным ограничителем. Между этими пределами алгоритм на фиг.5 сходится к коэффициентам ФПС и ФОС, которые являются "гибридами" упомянутых двух ограничительных пределов. Такая "гибридизация" выполняется автоматически итеративным алгоритмом. По этой причине полученные таким образом коэффициенты ФПС и ФОС называются "гибридными коэффициентами ЭРОС".
Описанные выше варианты требуют явного знания канала H(z), чтобы построить различные ковариации и взаимные ковариации ур.(4). При этом винеровские гибридные коэффициенты ФПС и ФОС определяются путем решения ур.(4) для f Q ,b Q. Однако на практике H(z) обычно не известно в приемнике, поэтому желателен альтернативный метод определения винеровских гибридных коэффициентов ЭРОС для ФПС и ФОС. Альтернативный вариант, именуемый как "адаптивный гибридный ЭРОС", не требует явного знания канала H(z). Сначала определим среднеквадратическую ошибку (MSE):

где Xn - содержание ФПС в момент времени n, Zn - содержание ФОС в предположении безошибочной обратной связи и Δ - ошибочные символы обратной связи, введенные "каналом"  Так как предполагается, что ошибки, введенные являются н.о.р. и независимыми, ур. (9) можно записать следующим образом:
Так как предполагается, что ошибки, введенные являются н.о.р. и независимыми, ур. (9) можно записать следующим образом:

где EQ означает "ожидание" в отношении Используя тот факт, что совокупность передачи нормирована по единице энергии, и определение ρ
Q в ур. (5), получаем:


где
Объединение ур. (9b) с ур. (9а) дает

Следует отметить, что  , появившийся в ур. (9с), можно интерпретировать как "энергию" в коэффициентах ФОС. Уравнение (9с) является отправной точкой для получения целого ряда адаптивных алгоритмов. Например, для получения адаптивного алгоритма на основе рекурсивного метода наименьших квадратов (РНК) новая функция стоимости определяется путем замены статистического ожидания на выборочное среднее, например, n=1, …, N. Затем применяются стандартные методы для получения рекурсивного оптимизатора этой функции стоимости. В одном варианте применяется оптимизатор РНК функции стоимости, определенный следующим образом:
, появившийся в ур. (9с), можно интерпретировать как "энергию" в коэффициентах ФОС. Уравнение (9с) является отправной точкой для получения целого ряда адаптивных алгоритмов. Например, для получения адаптивного алгоритма на основе рекурсивного метода наименьших квадратов (РНК) новая функция стоимости определяется путем замены статистического ожидания на выборочное среднее, например, n=1, …, N. Затем применяются стандартные методы для получения рекурсивного оптимизатора этой функции стоимости. В одном варианте применяется оптимизатор РНК функции стоимости, определенный следующим образом:

где

Следует отметить, что это можно назвать "модифицированной мерой энергии коэффициентов фильтра обратной связи" или «поправочным членом ошибки». Оптимизацию РНК можно выполнять на символах пилот-сигнала, присутствующих в передаче.
Алгоритм наименьших средних квадратов: Другой вариант оптимизации ур. (9с) основан на алгоритме наименьших средних квадратов (НСК). Алгоритм НСК рекурсивно корректирует коэффициенты ФПС и ФОС гибридного ЭРОС, чтобы минимизировать MSE, определенную в ур. (9с). Для фиксированного канала корректировки алгоритма наименьших средних квадратов (НСК) определяются как 
где MSE определено в ур. (9с), µ - размер шага НСК и E- означает отброс статистического ожидания в определении ур. (9с). Вычисление частичных производных приводит к
Когда выбирается достаточно малое значение µ, последовательность итераций, определенная в ур. (11)-(13), стабильная и сходится к набору коэффициентов, которые решают ур. (4). Следует отметить, что эта последовательность итераций не требует явной оценки ковариаций и взаимных ковариаций в ур. (4).
На фиг.6 проиллюстрирован алгоритм НСК согласно одному варианту изобретения. Алгоритм 500 начинается с выбора исходного значения SINR 0 на этапе 502. Кроме того, индекс k инициализируется как k=0. На этапе 504 оценивается значение SINR k и вычисляется или определяется α(SINR k ) из заранее вычисленной справочной таблицы (СПТ). Ур. (11)-(13), приведенные выше, вычисляются итеративно на основании символов пилот-сигнала в передаче до тех пор, пока не будут удовлетворены критерии сходимости на этапе 506. Результат такой итерации определяет значения для (f k ,b k ). На этапе 508 процесс оценивает SINR k+1, который является SINR на выходе эквалайзера, когда коэффициенты ФПС и ФОС равны (f k ,b k ). Эта оценка может быть выполнена с помощью символов пилот-сигнала при передаче. Затем процесс приращивает индекс k. После достижения сходимости SINRk в блоке решения 510 процесс переходит к этапу 512 для применения коэффициентов фильтров. Затем процесс возвращается к этапу 504.
Алгоритм с периодическими пакетами пилот-сигнала. Согласно другому варианту изобретения, в системе связи применяются периодически передаваемые пакеты пилот-сигнала, которые используются приемниками для коррекции коэффициентов фильтров в эквалайзере приемника. Такая коррекция часто называется "тренировкой" эквалайзера. Примером такой системы является система, поддерживающая высокую скорость передачи данных (ВСД), которая описана в стандарте "TIA/EIA-IS-856 CDMA2000 High Rate Packet Data Air Interface Specification" (стандарте IS-856). В системе ВСД через каждые 0,833 мс передаются 96 символов пилот-сигнала. Каждая группа из 96 символов пилот-сигнала называется "пакетом пилот-сигнала". Между пакетами пилот-сигнала система ВСД передает символы данных, предназначенные для приемников. На фиг.7 показан алгоритм для применения гибридного ЭРОС на основе НСК в такой системе. Вначале алгоритм 600 устанавливает SINR0 равным 0 или ∞ на этапе 602. Первоначальный выбор SINR не указан и может быть неважным, хотя для обеспечения наиболее быстрой сходимости может быть предпочтительным SINR0, равный ∞. Также инициализируется индекс k, который устанавливается равным 0. На этапе 604 алгоритм определяет SINRk и вычисляет α(SINR k ) или определяет необходимое значение путем обращения к заранее вычисленной справочной таблице. Исходные значения f и b устанавливаются как f 0 =0 и b 0 =0 на этапе 606. Во время (k+1)-го пакета пилот-сигнала процесс итерирует ур. (11)-(13) для всех элементов пакета пилот-сигнала на этапе 608. В данном примере ВСД алгоритм 600 осуществляет итерацию для 96 элементов пакета пилот-сигнала и сохраняет конечные значения f и b. На этапе 610 процесс оценивает SINR k+1 , используя 96 элементов предыдущего пакета пилот-сигнала. Во время части данных, следующей за (k+1)-м пакетом пилот-сигнала, сохраненные значения f и b загружаются в ФПС и ФОС, и символы данных компенсируются стандартным методом с решающей обратной связью. На этапе 614 процесс вычисляет значение α(SINR k+1 ) и приращивает k. Процесс продолжается применением этого алгоритма во время операций демодуляции.
Алгоритм на фиг.7 является адаптивным для медленно изменяющихся во времени каналов, как квази-устойчивое состояние SINRk, и поэтому не ожидается, что α(SINR k ) сильно изменится в течение времени сходимости алгоритма НСК.
Мягкий ограничитель: Как обсуждалось выше, распространение ошибок существенно ограничивает использование ЭРОС в системах связи с кодированием каналов. Так как причинные ISI аннулируются путем обратной подачи решений для индивидуальных символов, одна изолированная ошибка решения может привести к пакету последующих ошибок решения, что существенно увеличит остаточные помехи на выходе эквалайзера. Если применяется сильное кодирование каналов, то вероятность ошибки решения для символа не является пренебрежимо малой (обычно она составляет около 25 процентов), и распространение ошибки может серьезно повлиять на работу ЭРОС. Одним из способов исключения эффектов такого распространения ошибок является признание, что обычный ограничитель по "минимальному расстоянию" присоединяет уровень недоверия к решениям для символов. Иными словами, решения обычного ограничителя не обеспечивают меры точности или корректности решений для символов. Если бы решение было известно с сомнительной точностью, то, возможно, было бы лучше аннулировать вклад этого символа в после-курсорный хвост, чем рисковать увеличением остаточных помех при вычитании неправильного решения. Иными словами, не очень точные решения для символов не следует включать в петлю обратной связи, которая аннулирует причинные ISI.
Один вариант ограничителя, который вводит доверительный уровень в процесс решения, будет именоваться далее как "мягкий ограничитель". Один мягкий ограничитель описывается математической моделью, которая будет поясняться ниже. Сначала допустим, что входной символ в ограничитель определяется как

где y - переданный символ, принадлежащий к совокупности Ψ, и n состоит из остаточного шума и межсимвольных помех. Допустим, что y равномерно распределен по Ψ, так что все точки совокупности передаются с равной вероятностью. Пусть  будет функцией потерь, измеряющей потери, понесенные при решении ограничителем, когда переданный символ является y. Оптимальный ограничитель
будет функцией потерь, измеряющей потери, понесенные при решении ограничителем, когда переданный символ является y. Оптимальный ограничитель  , где слово "оптимальный" подразумевает ограничитель, минимизирующий ожидаемые потери, определяется с помощью байесова правила:
, где слово "оптимальный" подразумевает ограничитель, минимизирующий ожидаемые потери, определяется с помощью байесова правила:

Для минимальной вероятности ошибки (МВО) функция потерь определяется как

ожидаемые потери приводят к

и поэтому

Кроме того, если предположить, что помехи n являются гауссовой случайной переменной с нулевым средним и дисперсией σ2, то

независимо от σ 2. Это традиционный ограничитель "по минимальному расстоянию", и хотя он является "оптимальным по Байесу" для функции потерь ур. (16), этот ограничитель может привести к распространению ошибок по причинам, обсуждавшимся выше. Альтернативная конструкция ограничителя учитывает квадратическую функцию потерь:

которая, в отличие от функции потерь МВО, отбраковывает большие ошибки более значительно, чем меньшие ошибки. Из ур. (15) следует:

и условное среднее равно:

Важно отметить, что в отличие от ограничителя по ур. (19), ограничитель по ур. (22) требует оценки дисперсии помех и шума σ2 (например, σ2= ). Следует отметить, что ограничитель по ур. (22) соответствует центру апостериорного распределения на совокупности символов, т.е. центру члена в квадратных скобках […] в ур. (22). Следовательно, при большом σ2 предположение равномерного априорного распределения на симметричной совокупности подразумевает почти равномерное апостериорное распределение, а значит, центр близок к нулю. С другой стороны, при малом σ2 масса апостериорного распределения сконцентрирована на действительном переданном символе и соседних с ним точках совокупности, поэтому центр близок к переданному символу. Поэтому ограничитель по ур. (22) называется "мягким ограничителем".
). Следует отметить, что ограничитель по ур. (22) соответствует центру апостериорного распределения на совокупности символов, т.е. центру члена в квадратных скобках […] в ур. (22). Следовательно, при большом σ2 предположение равномерного априорного распределения на симметричной совокупности подразумевает почти равномерное апостериорное распределение, а значит, центр близок к нулю. С другой стороны, при малом σ2 масса апостериорного распределения сконцентрирована на действительном переданном символе и соседних с ним точках совокупности, поэтому центр близок к переданному символу. Поэтому ограничитель по ур. (22) называется "мягким ограничителем".
Мягкий ограничитель можно с минимальной модификацией использовать в адаптивном гибридном ЭРОС. Коэффициенты ФПС и ФОС выбираются таким образом, чтобы оптимизировать следующее определение MSE:

где

подобно ур. (5), и λ2 Q определяется как

"Канал"  определяется как:
определяется как:

где σ(.) представляет мягкий ограничитель, определенный в ур. (22), а Z - комплексный гауссов шум, определенный точно так же, как в ур. (7). Следуя аналогичному развитию схемы оптимизации на основании алгоритма НСК, найдем, что ур. (11), (12) и (13) остаются без изменения, за исключением того, что α Q =1+λ 2 Q -2ρ Q вычисляется из ур. (24а), (24b) и мягкий ограничитель определен в ур. (25). Как и ранее, коэффициент потерь на фильтрацию (1-2ρ Q +λ 2 Q ) зависит от SINR и может быть определен по справочной таблице.
Основанный на НСК алгоритм, описанный выше, не требует дополнительных изменений. Во время пилотной/тренировочной части слота адаптация выполняется как и прежде; во время части данных в слоте используется ограничитель по условному среднему вместо "жесткого" ограничителя по минимальному расстоянию.
Вычисления, выполняемые в мягком ограничителе, а именно ур. (22), могут быть слишком сложными для некоторых практических реализаций. В одном варианте конструкция ограничителя упрощена тем, что выходной сигнал ограничителя ограничен приемом большинства значений N. Эквивалентно, при этом входной сигнал ограничителя ограничивается приемом большинства значений N. Иными словами, входной сигнал  ограничителя разбивается до одной из N точек с помощью квантователя, определенного как Q:
ограничителя разбивается до одной из N точек с помощью квантователя, определенного как Q: Тогда для k=1, …, N, σ
Тогда для k=1, …, N, σ вычисляется как
вычисляется как

где

Квантованную работу ограничителя можно суммировать следующим образом: 1) квантуется до одного из N возможных значений, и 2) это значение и знание SINR используются в качестве индексов в справочной таблице для определения  Так как сложность данной конструкции заключается в операции 1), для дополнительного упрощения можно ограничить
1, …,
N расположением на равномерной квадратной сетке, а затем квантовать путем отдельного квантования его действительной и мнимой частей с использованием критерия "ближайшего соседа". Работу такого ограничителя можно реализовать с помощью простой логики, т.е. сначала вычислять ближайшую группу соседей на основании действительной координаты и затем вычислять ближайшего соседа в этой подгруппе на основании мнимой координаты . Дополнительно, справочная таблица может быть довольно грубой для SINR с шагами 1 дБ, достаточными для большинства применений. Например, при использовании справочных таблиц {σk} для SINR=5 дБ и SINR=6 дБ, соответствующие значения σk для промежуточного значения SINR, скажем 5,4 дБ, можно определить с помощью подходящей интерполяции между двумя СПТ. Иными словами, соответствующие значения σ
k на промежуточных значениях SINR можно сформировать в устройстве ограничителя, что уменьшает необходимые требования к памяти/хранению.
Так как сложность данной конструкции заключается в операции 1), для дополнительного упрощения можно ограничить
1, …,
N расположением на равномерной квадратной сетке, а затем квантовать путем отдельного квантования его действительной и мнимой частей с использованием критерия "ближайшего соседа". Работу такого ограничителя можно реализовать с помощью простой логики, т.е. сначала вычислять ближайшую группу соседей на основании действительной координаты и затем вычислять ближайшего соседа в этой подгруппе на основании мнимой координаты . Дополнительно, справочная таблица может быть довольно грубой для SINR с шагами 1 дБ, достаточными для большинства применений. Например, при использовании справочных таблиц {σk} для SINR=5 дБ и SINR=6 дБ, соответствующие значения σk для промежуточного значения SINR, скажем 5,4 дБ, можно определить с помощью подходящей интерполяции между двумя СПТ. Иными словами, соответствующие значения σ
k на промежуточных значениях SINR можно сформировать в устройстве ограничителя, что уменьшает необходимые требования к памяти/хранению.
В качестве иллюстрации применения мягкого ограничителя с гибридным ЭРОС (ГЭРОС) рассмотрим фиг.8А и 8В. На фиг.8А показана совокупность 8-PSK, в которой 8 комплексных символов представляют 3 закодированных бита, преобразованных для модуляции. Как показано на чертеже, кружки представляют точки совокупности, использованные для модуляции в передатчике. Отметки "х" показывают выборки, принятые приемником и включающие в себя шум и помехи, внесенные во время передачи. Следует отметить, что принятые выборки необязательно совпадают с действительными символами совокупности. В этом случае приемник решает, какой символ совокупности был действительно отправлен. Обычно принятые точки концентрируются вокруг действительных переданных символов совокупности.
Один способ определения переданного символа из принятых выборок заключается в том, чтобы разделить карту совокупности на сектора, как показано на фиг.8В. В данном случае карта совокупности разделена на 8 секторов - 702, 704, 706, 708, 710, 712, 714 и 716. Эти сектора определены, например, в соответствии с метрикой минимального расстояния, в которой используется евклидово расстояние или разделение между двумя точками совокупности для выбора границы. Проблема возникает, когда принятая выборка находится приблизительно на равном расстоянии (т.е. приблизительно на границе) между двумя точками совокупности. В этом случае, если в процессе решения будет выбран неправильный символ совокупности, данная ошибка может распространиться в петлю обратной связи ЭРОС. Чтобы исключить такие ошибки и связанное с ними усиление в ЭРОС, применяется мягкий ограничитель, который выдает значение необязательно на символе совокупности. Мягкий ограничитель неявным образом определяет доверительный уровень из принятых выборок. Этот доверительный уровень дает системе руководство для оценки выборки. Если доверительный уровень низкий, т.е. существует вероятность ошибки, то данной выборке не придается значения в части обратной связи эквалайзера. Если же доверительный уровень высокий, выборка признается надежной и поэтому полученную из нее подходящую оценку символа можно использовать в части обратной связи эквалайзера.
На фиг.9А показана карта совокупности 2-PSK. Следует отметить, что решения, вынесенные на основании минимального расстояния от символа совокупности, могут приводить к ошибкам для принятых выборок, как показано значком "х". Применение мягкого ограничителя в одном варианте делит карту совокупности на прямоугольники, как показано на фиг.9В. На чертеже прямоугольники, такие как прямоугольник 720, являются полубесконечными в направлении Y, и не все прямоугольники охватывают символы совокупности. Когда входная выборка ограничителя попадает в один из полубесконечных прямоугольников, присваивается условное среднее значение. Эффективно все точки в прямоугольнике отображаются общим значением. Это значение представляет условное среднее переданного символа, если входная выборка ограничителя попадает в представляющий интерес прямоугольник. Отображение каждого прямоугольника соответствующим условным средним значением является функцией отношения сигнал/помеха+шум (SINR). Например, данный прямоугольник можно отобразить в σ для SINR на первом уровне, например, SINR=4 дБ. Тот же самый прямоугольник можно отобразить в σ' для SINR на втором уровне, например, SINR=5 дБ. Отображение и соответствующие условные средние значения сохраняются в справочных таблицах, чтобы их можно было легко найти. В альтернативном варианте условное среднее значение вычисляют согласно заранее определенному алгоритму. Следует отметить, что квадратная или прямоугольная сетка легко реализуется и может растягиваться для более сложных совокупностей.
На фиг.10 показан эквалайзер 800 с использованием мягкого ограничителя. Эквалайзер 800 содержит ФПС 802, подсоединенный к суммирующему блоку 804. ФПС 802 управляется адаптивным алгоритмом 808 коррекции. Блок 808 адаптивного управления зависит от блока 816 оценки SINR. В альтернативном варианте блок 816 оценки SINR может быть реализован как блок оценки MSE. Блок 816 оценки SINR передает оценку SINR в справочную таблицу (СПТ) 810. Оценка SINR используется вместе со значениями, хранимыми в СПТ 810, для определения αQ(SINR)=1+λ2 Q-2ρQ , установленного согласно ур. (24а), (24) и (24с). Адаптивный алгоритм 808 коррекции использует значение αQ, полученное из СПТ 810, для обновления коэффициентов ФПС 802 и ФОС 806 путем итерации ур. (11), (12) и (13). Напомним, что ур. (11), (12) и (13) были основаны на алгоритме НСК и предназначены для оптимизации функции стоимости MSE, определенной в ур. (23). В альтернативном варианте адаптивный алгоритм 808 коррекции может применять другой адаптивный алгоритм фильтрации, такой как алгоритм РНК, для оптимизации функции стоимости MSE, определенной в ур. (23). ФОС 806 выдает оценку причинных ISI, присутствующих в выходном сигнале ФПС 802. Выходной сигнал ФОС 806 подается в суммирующий блок 804, где он вычитается из выходного сигнала ФПС 802. Затем выходной сигнал суммирующего блока 804, т.е. оценка переданного символа, передается в декодер 820, блок оценки SINR/MSE 816 и мягкий ограничитель 812. Мягкий ограничитель 812 принимает оценку SINR/MSE из блока оценки SINR/MSE 816 и формирует следующую оценку переданного символа, и выдает эту следующую оценку символа для фильтрации в ФОС 806.
На фиг.11 показан алгоритм выполнения процесса мягкого ограничения, содержащего мягкий ограничитель согласно одному варианту изобретения. Сначала определяется область, такая как квадрат или прямоугольник сетки, на карте совокупности, соответствующая квантованию входной выборки ограничителя на этапе 902. На этапе 904 определяется значение SINR. На этапе 906 процесс выбирает соответствующее отображение как функцию значения SINR. Согласно одному варианту отдельные части устройства хранения хранят отдельные справочные таблицы. Доступ к таблицам осуществляется по значению SINR. На этапе 908 определяется условное среднее значение из соответствующего отображения, и оно является выходным сигналом ограничителя.
В другом варианте мягкого ограничителя применяется квадратная сетка для карты совокупности и используется расширение Тейлора для получения более точного условного среднего значения. В этом варианте множество меньших таблиц хранят значения, соответствующие каждому значению SINR. Процесс 920 проиллюстрирован на фиг.12. На этапе 921 определяется область входного сигнала мягкого ограничителя. На этапе 922 определяется значение SINR. Это значение SINR используется для определения соответствующих отображений σ1(.) и σ2(.) на этапе 924. Область этапа 920 отображается в значении σ1( ), где i соответствует данной области. Затем выполняется второе отображение на этапе 922, соответствующее значению SINR и области этапа 920, чтобы получить σ2(). На этапе 928 условное среднее значение аппроксимируется как
), где i соответствует данной области. Затем выполняется второе отображение на этапе 922, соответствующее значению SINR и области этапа 920, чтобы получить σ2(). На этапе 928 условное среднее значение аппроксимируется как  Отображения σ1(.) и σ2(.) тесно связаны с нулевой и первой производными σ(.), определенными в ур. (22).
Отображения σ1(.) и σ2(.) тесно связаны с нулевой и первой производными σ(.), определенными в ур. (22).
На фиг.13 показан мягкий ограничитель 954 согласно одному варианту изобретения. Блок 952 оценки SINR принимает одну или несколько оценок символов и выдает значение оценки SINR(n). SINR(n) можно квантовать в факультативном квантователе 956 и подавать в устройство хранения 960, такое как СПТ. Оценка символа, соответствующая входному сигналу мягкого ограничителя, также подается в квантователь 956, в котором эта оценка символа квантуется и квантованное значение используется вместе с оценкой SINR для определения соответствующего значения, хранимого в устройстве хранения 960. Следует отметить, что в одном варианте информация хранится в строках и столбцах, при этом строки соответствуют значениям SINR, а столбцы - значениям символов. Однако в альтернативных вариантах эту информацию можно хранить любым способом, который позволяет находить ее на основании значения SINR и значения символа. Значения, хранимые в устройстве хранения 960, могут быть условным средним действительного символа совокупности при оценке входного сигнала мягкого ограничителя, такой как определенная в ур. (22), (26) и (27). На фиг.14 показан мягкий ограничитель 980 согласно альтернативному варианту с использованием вычисления ряда Тейлора. Как показано, один или несколько принятых символов подаются в блок 982 оценки SINR, и одна оценка символа, соответствующая входному сигналу мягкого ограничителя, подается непосредственно в мягкий ограничитель 980. Следует отметить, что принятые символы искажены каналом передачи, и поэтому они также называются принятыми "выборками". Блок 982 оценки SINR передает оценку SINR(n) в мягкий ограничитель 980. SINR(n) можно подавать в факультативный квантователь 986. SINR(n), независимо от того, является ли оно квантованным или нет, подается в два блока хранения, А 988 и В 990. Оценка входного символа мягкого ограничителя подается в квантователь 984, выходной сигнал которого также передается в блоки А 988 и В 990 хранения. Блоки А 988 и В 990 хранения хранят информацию, используемую для вычисления условных средних значений действительного символа совокупности для данной оценки входного символа мягкого ограничителя. Такие значения могут быть нулевой и первой производной условного среднего значения действительного символа совокупности для данной оценки входного символа мягкого ограничителя, как определено в ур. (22), (26) и (27). Значение SINR(n) и квантованное значение символа используются для идентификации соответствующих значений в устройстве хранения А 988 и В 990. Суммирующий блок 992 используется для реализации вычисления ряда Тейлора. Оценка входного символа мягкого ограничителя, а также квантованное значение подаются в суммирующий блок 992. Кроме того, значения, хранимые в блоках А 988 и В 990 устройства хранения, также подаются в суммирующий блок 992. Суммирующий блок 992 использует эти входные сигналы для вычисления выходного сигнала, который является условной средней оценкой действительного символа совокупности. Хотя настоящее изобретение было описано в связи с беспроводной системой связи, эта система взята исключительно в качестве примера. Описанные принципы изобретения можно применить в различных системах связи, включая, без ограничения перечисленным, проводную систему связи, например, реализацию в проводном модеме, и т.п. Настоящее изобретение можно использовать в системе связи с высокоскоростной передачей данных, и оно позволяет оптимизировать ресурсы и пропускную способность системы передачи данных путем повышения чувствительности приемника и скорости передачи данных. Специалистам в данной области техники будет понятно, что информацию и сигналы можно представлять с помощью множества различных методов и технологий. Например, данные, команды, инструкции, информацию, сигналы, биты, символы и элементы сигнала, которые упоминались по всему описанию, можно представить в виде напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц, или любой их комбинации.
Специалистам в данной области техники также будет понятно, что различные иллюстративные логические блоки, модули, схемы и операции алгоритмов, описанные в связи с представленными выше вариантами, можно реализовать в виде электронных аппаратных средств, компьютерных программ или их комбинации. Для иллюстрации взаимозаменяемости аппаратных и программных средств различные иллюстративные компоненты, блоки, модули, схемы и этапы были описаны в терминах их функций. Реализация этих функций в аппаратных или программных средствах зависит от конкретного применения и конструктивных ограничений, налагаемых на систему в целом. Опытные специалисты в данной области техники смогут применить описанные функции различными путями для каждого конкретного применения, однако такие решения не следует считать выходящими за рамки объема настоящего изобретения.
Различные иллюстративные логические блоки, модули и схемы, описанные в связи с представленными вариантами, можно реализовать или выполнить в универсальном процессоре, процессоре цифровых сигналов (ПЦС), ИС прикладной ориентации, вентильной матрице, программируемой в условиях эксплуатации, или другом программируемом логическом устройстве, отдельной вентильной или транзисторной логике, отдельных аппаратных компонентах, или любой их комбинации, выполненной с возможностью выполнения описанных функций. Универсальный процессор может быть микропроцессором, но альтернативно этот процессор может быть любым обычным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор можно также реализовать в виде комбинации вычислительных устройств, например, комбинации ПЦС и микропроцессора, множества микропроцессоров, одного или нескольких микропроцессоров вместе с ядром ПЦС, или любой такой конфигурацией.
Операции способа или алгоритма, описанного в связи с раскрытыми выше вариантами, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, исполняемом процессором, или в комбинации этих двух средств. Программный модуль может постоянно находиться в памяти ОЗУ, флэш-памяти, памяти ПЗУ, памяти СППЗУ, памяти ЭППЗУ, регистрах, на жестком диске, съемном диске, CD-ROM или на любой другой известной форме запоминающей среды. Примерный носитель данных связан с процессором, который может считывать информацию с носителя данных и записывать на него информацию. Альтернативно, носитель данных может быть частью процессора. Процессор и носитель данных могут входить в состав ИС прикладной ориентации. ИС прикладной ориентации может входить в состав пользовательского терминала. Альтернативно, процессор и носитель данных могут входить в состав пользовательского терминала как отдельные компоненты.
Представленное выше описание вариантов изобретения позволит любому специалисту в данной области техники осуществить или использовать настоящее изобретение. Для специалистов в данной области техники будут очевидны различные модификации этих вариантов, и описанные общие принципы можно применить в других вариантах, не выходя за рамки объема изобретения. Таким образом, настоящее изобретение не ограничено описанными вариантами и имеет самый широкий объем, соответствующий раскрытым принципам и новым признакам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГИБРИДНОЙ КОРРЕКЦИИ С РЕШАЮЩЕЙ ОБРАТНОЙ СВЯЗЬЮ | 2003 |
|
RU2328081C2 |
| ОБНАРУЖЕНИЕ MIMO С ПОДАВЛЕНИЕМ ПОМЕХ У СВОЕВРЕМЕННЫХ КОМПОНЕНТОВ СИГНАЛА | 2007 |
|
RU2420004C2 |
| ПРИЕМНИК И СПОСОБ ДЛЯ ОБРАБОТКИ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ МЯГКИХ ПИЛОТ-СИМВОЛОВ | 2009 |
|
RU2624101C2 |
| ПРИЕМНИК И СПОСОБ ДЛЯ ОБРАБОТКИ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ МЯГКИХ ПИЛОТ-СИМВОЛОВ | 2009 |
|
RU2519566C2 |
| МНОГОКАСКАДНЫЙ ПРИЕМНИК ДЛЯ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2404508C2 |
| НАСТРОЙКА ПРИЕМНИКА МЕЖДУ ПАКЕТАМИ ПИЛОТ-СИГНАЛОВ | 2008 |
|
RU2452109C2 |
| ЭКВАЛАЙЗЕРНАЯ СТРУКТУРА, РАБОТАЮЩАЯ НА УРОВНЕ ЭЛЕМЕНТАРНОЙ ПОСЫЛКИ ИЛИ СИМВОЛА, ДЛЯ СИСТЕМ С МНОЖЕСТВОМ ПЕРЕДАЮЩИХ И ПРИЕМНЫХ АНТЕНН | 2005 |
|
RU2336637C2 |
| СПОСОБ ОЦЕНКИ КОРРЕЛЯЦИЙ ИСКАЖЕНИЙ В ПРИЕМНИКЕ БЕСПРОВОДНОЙ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2407147C2 |
| СВЯЗНОЙ РАДИОПРИЕМНИК С АДАПТИВНЫМ КОМПЕНСАТОРОМ | 2009 |
|
RU2494557C2 |
| ОЦЕНКА КАНАЛА ДЛЯ ПОДАВЛЕНИЯ ПОМЕХ | 2005 |
|
RU2364023C2 |




Изобретение относится к области беспроводной связи для коррекции принятого сигнала. Технический результат: уменьшение линейных искажений, распространения ошибок в эквалайзере с решающей обратной связью. Предложены способ и устройство для эквалайзера с решающей обратной связью, в которых используется поправочный член для компенсации ошибок ограничителя, чтобы исключить распространение ошибок. Коэффициенты фильтров для эквалайзера выбираются таким образом, чтобы минимизировать функцию стоимости для эквалайзера, включая поправочный член как функцию энергии коэффициентов фильтров. Эквалайзер содержит генератор коэффициентов, чувствительный к поправочному члену. В одном варианте переданный символ из принятой выборки оценивается как функция отношения сигнал/помеха + шум (SINR) принятой выборки. Принятая выборка квантуется и отображается в области сигнальной совокупности на сетке, наложенной на переданную совокупность символов. Эта область может соответствовать оценочному значению символа или может дополнительно обрабатываться для получения оценочного значения символа. 3 н. и 26 з.п. ф-лы, 17 ил.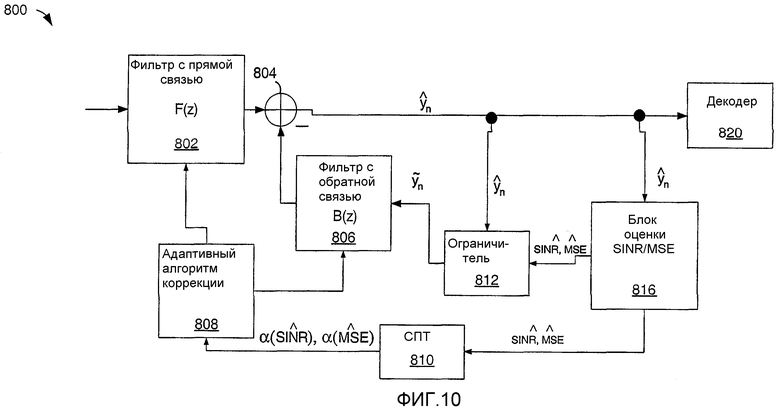
1. Способ оценки переданного символа, принадлежащего заранее определенной сигнальной совокупности, заключающийся в том, что принимают выборку сигнала, соответствующую переданному символу, оценивают переданный символ на основании выборки сигнала и информации доверительного уровня предыдущих выборок сигнала, причем информация доверительного уровня основана на, по меньшей мере, одном из: предыдущих выборках сигнала и оцененного отношения сигнал/помеха + шум (SINR).
2. Способ по п.1, в котором дополнительно
вычисляют дисперсию выборки сигнала, определенную отношением
и определяют информацию доверительного уровня выборки сигнала как
где  представляет собой выборку сигнала, а у представляет собой символы, принадлежащие заранее определенной совокупности ψ.
представляет собой выборку сигнала, а у представляет собой символы, принадлежащие заранее определенной совокупности ψ.
3. Способ по п.1, в котором заранее определенная сигнальная совокупность содержит множество областей, причем каждая область сигнальной совокупности связана с информацией доверительного уровня, сохраненной в блоке хранения.
4. Способ по п.3, в котором дополнительно
определяют конкретную область сигнальной совокупности на основании выборки сигнала и
определяют информацию доверительного уровня, соответствующую данной конкретной области сигнальной совокупности.
5. Способ по п.4, в котором дополнительно
определяют запись в блоке хранения, соответствующую конкретной области и оцененному SINR.
6. Способ по п.4, в котором при определении конкретной области определяют конкретную область с использованием критерия минимального евклидова расстояния.
7. Способ по п.3, в котором множество наборов информации доверительного уровня сохраняют в блоке хранения, причем каждый набор связан со значением SINR набора значений SINR, и при этом дополнительно
интерполируют записи в блоке хранения для определения первого оценочного значения для первого значения SINR, причем первое значение SINR не входит в состав набора значений SINR.
8. Способ по п.3, в котором каждая область является прямоугольником.
9. Способ по п.3, в котором блок хранения содержит записи, идентифицированные SINR и информацией доверительного уровня.
10. Способ по п.1, в котором дополнительно
определяют первую оценку на основании SINR и принятой выборки сигнала и
определяют вторую оценку на основании комбинации первой оценки, SINR и принятой выборки сигнала.
11. Способ по п.10, в котором первую оценку вычисляют с помощью функции ограничения по минимальному расстоянию.
12. Способ по п.10, в котором вторая оценка равна первой оценке плюс поправочный член ошибки.
13. Способ по п.10, в котором первую оценку определяют как

а вторую оценку определяют как
где каждое σ - уникальное отображение значения выборки сигнала в оценочное значение,  -принятая выборка сигнала, и
-принятая выборка сигнала, и  -квантованная версия принятой выборки сигнала.
-квантованная версия принятой выборки сигнала.
14. Способ по п.13, в котором при определении первой оценки квантуют принятую выборку сигнала для образования квантованной выборки сигнала,
формируют первую оценку на основании квантованной выборки сигнала и формируют вторую оценку на основании первой оценки.
15. Устройство для оценки переданного символа, принадлежащего заранее определенной сигнальной совокупности, содержащее
средство для приема выборки сигнала,
средство для оценки переданного символа на основании выборки сигнала и информации доверительного уровня предыдущих выборок сигнала, причем информация доверительного уровня основана на, по меньшей мере, одном из: предыдущих выборках сигнала и оцененного отношения сигнал/помеха + шум (SINR).
16. Устройство по п.15, дополнительно содержащее
средство для вычисления дисперсии выборки сигнала, определенной отношением
и
средство для определения информации доверительного уровня для выборки сигнала как

где представляет собой выборку сигнала, у представляет собой переданные символы, принадлежащие заранее определенной сигнальной совокупности ψ.
17. Устройство по п.15, в котором заранее определенная сигнальная совокупность содержит множество областей, причем каждая область сигнальной совокупности связана с информацией доверительного уровня, сохраненной в блоке хранения.
18. Устройство по п.15, дополнительно содержащее
средство для определения конкретной области сигнальной совокупности на основании выборки сигнала и
средство для определения информации доверительного уровня выборки сигнала, соответствующей данной конкретной области сигнальной совокупности.
19. Устройство по п.18, дополнительно содержащее
средство для определения записи в блоке хранения, соответствующей конкретной области и SINR.
20. Устройство по п.18, в котором средство для определения конкретной области содержит
средство для определения конкретной области с помощью критерия минимального евклидова расстояния.
21. Устройство по п.17, в котором множество наборов информации доверительного уровня хранятся в блоке хранения, причем каждый набор связан со значением SINR набора значений SINR, и устройство дополнительно содержит
средство для интерполяции записей в блоке хранения в целях определения первого оценочного значения для первого значения SINR, причем первое значение SINR не входит в состав набора значений SINR.
22. Устройство по п.17, в котором каждая область сигнальной совокупности имеет прямоугольную форму.
23. Устройство по п.17, в котором блок хранения содержит записи, идентифицированные SINR и информацией доверительного уровня.
24. Устройство по п.15, дополнительно содержащее
средство для определения первой оценки на основании SINR и принятой выборки сигнала и
средство для определения второй оценки на основании комбинации первой оценки, SINR и принятой выборки сигнала.
25. Устройство по п.24, в котором первая оценка вычисляется с помощью функции ограничения по минимальному расстоянию.
26. Устройство по п.24, в котором вторая оценка равна первой оценке плюс поправочный член ошибки.
27. Устройство по п.24, в котором первую оценку определяют как

а вторую оценку определяют как
где каждое σ представляет собой уникальное отображение значения выборки сигнала в оценочном значении,  представляет собой принятую выборку сигнала, и
представляет собой принятую выборку сигнала, и  представляет собой квантованную версию принятой выборки сигнала.
представляет собой квантованную версию принятой выборки сигнала.
28. Устройство по п.27, в котором средство для определения первой оценки содержит
средство для квантования принятой выборки сигнала для формирования квантованной выборки сигнала,
средство для формирования первой оценки на основании квантованной выборки сигнала и
средство для формирования второй оценки на основании первой оценки.
29. Устройство для оценки переданного символа, содержащее устройство хранения и процессор, подключенный к устройству хранения и выполненный с возможностью приема выборки сигнала, соответствующей переданному символу, принадлежащему заранее определенной сигнальной совокупности, оценки переданного символа на основании выборки сигнала и информации доверительного уровня предыдущих выборок сигнала, причем информация доверительного уровня основана на, по меньшей мере, одном из: предыдущих выборках сигнала и оцененного отношения сигнал/помеха+шум (SINR).
| US 5809086 А, 15.09.1998 | |||
| US 6252903 В1, 26.06.2001 | |||
| RU 97107847 А, 27.05.1999 | |||
| US 6226323 В1, 01.05.2001 | |||
| US 6195632 В1, 27.02.2001 | |||
| Гидравлический пресс | 1978 |
|
SU706173A1 |
| WO 00/69134 А1, 16.11.2000 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

