Изобретение относится к технике обеспечения безопасности работы строительных машин, преимущественно грузоподъемных кранов.
Известна система защиты от столкновений группы строительных машин - башенных кранов типа «SMIE-AC30» (Франция), содержащая устройства проводного (по кабелю) или беспроводного (по радиоканалу) обмена информацией между устройствами защиты, установленными на каждом из N работающих в группе башенных кранов, о положении, движениях и нагрузке его оборудования, а также установленное на каждом кране устройство защиты крана, включающее в себя группу датчиков контроля параметров оборудования крана и цифровой вычислитель, содержащий центральный процессор (микроконтроллер), дисплей и исполнительный блок. Положение крана и его оборудования в этой системе «привязаны» к определенным точкам стройплощадки. Цифровой вычислитель, контролируя положение, нагрузку и скорость перемещения крана и его оборудования, выявляет опасные сближения грузоподъемных кранов. Цифровой вычислитель на другом кране производит аналогичные вычисления для своего крана [1].
В этой системе, когда расчеты свидетельствуют об опасном сближении оборудования кранов, каждый цифровой вычислитель формирует соответствующие предупредительные сигналы и сигналы блокирования движений своего крана.
Известна также аналогичная система безопасности, в которой с целью повышения безопасности и эффективности работы строительных машин (кранов) на экране дисплея дополнительно формируются информационные сигналы, предваряющие начало движения или ограничивающие движение оборудования кранов в случае возможного пересечения их траекторий [2].
Недостатком этих систем является пониженная безопасность и пониженная эффективность одновременной работы строительных машин (кранов) за счет отсутствия как прямого определения расстояния между ними, так и предупреждения их столкновений с неподвижными объектами.
Известны также способ и система автоматической координатной защиты строительной машины - подъемного башенного крана, работающего в стесненных условиях. В этом техническом решении, в соответствии с планом производства работ, задают зоны с разными типами ограничений движения крана, связанные с конкретными объектами. Эти зоны вводятся в ЭВМ, не входящую в приборный комплекс системы координатной защиты. В ЭВМ программно формируется массив данных, каждый элемент которого сопоставлен элементу строительной площадки и содержит информацию о запрещенных движениях крана в соответствующей точке. Полученный массив данных записывается в перепрограммируемое постоянное запоминающее устройство системы координатной защиты, которая по сигналам от датчиков, определяющих положение крана и его элементов, формирует сигналы блокировки приводов при попадании крана и его рабочих органов в запрещенную зону [2].
Недостатки этой системы защиты (безопасности) обусловлены тем, что она не обеспечивает защиту от столкновений группы одновременно работающих строительных машин (кранов), не реализует защиту машин о перегрузки, а также не позволяет использовать для реализации функций защиты машины датчики, расположенные (размещенные) за пределами этой машины.
Задачами, на решение которых направлена заявленная группа изобретений, являются:
- повышение безопасности строительных машин при их групповой работе путем реализации дополнительных функций защиты каждой из машин за счет использования технических средств, размещенных за пределами этой машины;
- исключение дублирования отдельных составных частей системы безопасности группы строительных машин с соответствующим упрощением используемых технических средств, их монтажа, технического обслуживания и ремонта;
- предотвращение несанкционированного доступа к управлению каждой строительной машиной;
- повышение безопасности строительных машин при их групповой работе путем сокращения затрат времени на установку параметров или координат местоположения препятствий и объектов на строительной площадке;
- повышение надежности системы безопасности строительных машин, а также расширение внешних климатических и механических условий ее эксплуатации и хранения путем переноса на стационарный пост, в дополнение к переносу ЭВМ, отдельных составных частей этой системы.
Первый вариант системы безопасности строительных машин предусматривает использование датчиков, расположенных на одной строительной машине, для реализации функций защиты другой машины. В этой системе, содержащей установленные на каждой машине устройство проводного и/или беспроводного обмена данными, датчики нагрузки и пространственного положения машины и ее рабочего оборудования, а также по меньшей мере один датчик или одно устройство для измерения или задания положения (границ, координат, параметров) подвижных и/или неподвижных объектов, расположенных в зоне работы машины, цифровой вычислитель, оснащенный выходным устройством и выполненный с возможностью взаимодействия с устройством обмена данными, приема и обработки выходных сигналов датчиков, а также хранения в своей памяти, приема от устройства обмена данными и/или вычисления предельно допустимых значений параметров работы машины и последующего формирования и передачи на выходное устройство предупредительных сигналов и/или сигналов блокирования движений машины из условия предотвращения превышения текущих значений параметров работы машины их предельно допустимых значений, поставленные технические задачи решаются за счет того, что цифровые вычислители машин выполнены с возможностью обмена информацией о текущих и предельно допустимых значение параметров их работы и с последующей установкой или изменением предельно допустимых значений параметров или границ допустимых значений этих параметров для своей машины в зависимости от информации, полученной от другой машины.
Второй вариант системы безопасности строительных машин предусматривает определение уровня нагрузки и реализацию функций защиты строительной машины от перегрузки с помощью вычислительного устройства, размещенного вне этой машины. В этой системе, содержащей установленные на машине устройство проводного и/или беспроводного обмена данными, датчики нагрузки и пространственного положения машины и ее рабочего оборудования, цифровой вычислитель, оснащенный выходным устройством и выполненный с возможностью взаимодействия с устройством обмена данными, с возможностью приема и обработки выходных сигналов этих датчиков, а также передачи на выходное устройство сигналов, направленных на предотвращение превышения текущих значений параметров работы машины их предельно допустимых значений, поставленные технические задачи решаются путем применения внешнего вычислителя, не входящего в приборный комплекс машины, соединенного с цифровым вычислителем машины и выполненным с возможностью хранения в памяти и/или вычисления предельно допустимых значений параметров работы машины, характеризующих ее нагрузку, формирования предупредительного сигнала и/или сигнала блокирования движений машины, а также передачи этого сигнала в цифровой вычислитель машины.
При этом внешний вычислитель может быть реализован в виде мобильного устройства или стационарной ЭВМ. Либо цифровой вычислитель другой машины может быть дополнительно приспособлен для реализации функций внешнего вычислителя данной машины.
Кроме того, для решения поставленных задач в обоих вариантах системы безопасности дополнительно может быть реализовано:
- построение датчиков параметров (положений, границ, координат) подвижных и/или неподвижных объектов с использованием устройства технического зрения, радиолокационного средства, лазерного сканера и/или приемника сигналов с устройств позиционирования, установленных в граничных точках зоны работы машин, расположенных на объектах или прикрепленных к ним и выполненных, например, в виде GPS или RFID меток;
- обмен информацией о положении, координатах, параметрах и/или границах подвижных и/или неподвижных объектов, расположенных в зоне работы машин между цифровыми вычислителями машин, и установка каждым цифровым вычислителем в соответствии с полученной информацией предельно допустимых значений параметров пространственного положения этой машины и/или ее рабочего оборудования, или границ разрешенной рабочей зоны из условия предотвращения столкновений с этими объектами;
- оснащение системы датчиком расстояния между машинами и использование его сигналов цифровыми вычислителями для предотвращения столкновений машин и/или их рабочего оборудования;
- дополнительное оснащение системы датчиками параметров, характеризующих внешние условия работы машин (величину уклона рабочей площадки, скорость ветра, температуру окружающей среды, освещенность рабочей площадки и т.д.), передачу информации о выходных сигналах этих датчиков с одной машины на другую и их использование для защиты машин, в том числе машин, не содержащих этих датчиков;
- назначение цифрового вычислителя одной машины ведущим с точки зрения определения допустимых значений параметров пространственного положения этой машины и/или ее рабочего оборудования, либо границ разрешенной зоны работы, передача этих параметров или границ в цифровые вычислители других машины (ведомые вычислители) для использования в качестве предельно допустимых параметров пространственного положения или границ рабочей зоны для машин, на которых они установлены;
- реализация защиты от столкновений машин и/или их рабочего оборудования с учетом инерции машин и их перемещаемого оборудования;
- оснащение системы графическим дисплеем, подключенным к цифровому вычислителю, для отображения на экране дисплея условного графического изображения строительных машин и их рабочего оборудования на плане строительной площадки, а также границ разрешенной зоны их работы;
- формирование и передача на выходное устройство сигналов блокирования движений машины в случае отсутствия сигналов от цифрового вычислителя другой машины или от от внешнего вычислителя;
- реализация защиты от перегрузки группы строительных машин с использованием выходных сигналов датчиков, передаваемых между цифровыми вычислителями этих машин либо под управлением внешнего вычислителя.
Общий изобретательский замысел, объединяющий оба варианта системы безопасности и обеспечивающий достижение одних и тех же технических результатов, заключается в использовании внешних технических средств для реализации тех функций защиты строительных машин, которые не могут быть самостоятельно реализованы с использованием только технических средств, которыми оснащена данная машина.
Благодаря указанным отличительным признакам, не известным из уровня техники, для реализации функций защиты одной строительной машины используют датчики, установленные на другой машине, либо реализуется защита машины (группы машин) от перегрузки с помощью вычислительного устройства, размещенного вне этой машины, что и обеспечивает достижение указанных технических результатов.
На чертеже показана упрощенная структурная схема системы безопасности строительных машин.
Система содержит установленные на каждой из N машин устройство проводного и/или беспроводного обмена данными 1, датчики 2 и цифровой вычислитель 3, оснащенный выходным устройством 4.
Цифровой вычислитель 3 реализован, в частности, на основе микроконтроллера и в общем случае содержит процессорное ядро, встроенные запоминающие устройства для хранения данных и программы его работы, тактовый генератор и периферийные устройства.
Соединение цифрового вычислителя 3 с устройством обмена данными 1, датчиками 2 и выходным устройством 4 осуществляется с использованием отдельных проводов и/или мультиплексного канала обмена данными (CAN, LIN, RS-485 и т.д.).
Выходное устройство 4, соединенное с управляющими элементами или управляющими входами исполнительных приводов машины 5, может именоваться исполнительным или выходным блоком, контроллером и т.д. В зависимости от конструктивного исполнения исполнительных приводов машины 5 выходное устройство 4 выполнено в виде усилителей мощности (набора электронных ключей, реле, пускателей и т.д.), электрогидравлических распределителей, электромеханических позиционеров и т.п. Это устройство может содержать собственный микроконтроллер и средства для подключения к цифровому вычислителю 3 посредством отдельных проводов или мультиплексного канала обмена данными.
В приборный комплекс машины может входить также графический дисплей 6 и иные дополнительные узлы и блоки, условно не показанные на чертеже и соединенные с цифровым вычислителем 3 непосредственно или при помощи каких-либо согласующих устройств. К ним относятся, в частности, дополнительный блок энергонезависимой памяти регистратора параметров с часами реального времени, интерфейс для беспроводного или проводного считывания данных регистратора параметров, органы управления системой и т.д.
Датчики машины 2 предназначены для измерения параметров работы машины, характеризующих нагрузку и пространственное положение как самой машины, так и ее рабочего оборудования. Эти датчики в общем случае включают в себя датчики усилия в грузовом или стреловом канате (для грузоподъемной машины), давления в гидроцилиндрах подъема рабочего оборудования, угла азимута, угла наклона, длины и высоты подъема рабочего оборудования, угла наклона платформы, положения на строительной площадке (например, GPS приемник), приближения к линии электропередач и другие датчики, необходимость применения которых определяется конструкцией конкретной строительной машины и требованиям к ее системе безопасности.
Датчики 2 могут именоваться периферийными устройствами регистрации, периферийными контроллерами, измерительными устройствами и т.д. Они размещены в различных зонах машины, могут быть объединены в группы и могут иметь как аналоговые, так и цифровые выходы.
В зависимости от варианта исполнения системы в состав датчиков машины 2 могут входить датчики, осуществляющие измерения параметров (положений, границ, координат, размеров) подвижных и/или неподвижных объектов (препятствий для работы машины), расположенных в зоне работы машины (на строительной площадке). Такие датчики могут быть реализованы, в частности, с использованием принципов технического зрения (с определением необходимых параметров путем обработки видеоизображений с видеокамер, установленных на машине), радиолокационных средств, лазерного сканирования объектов, приемников сигналов с устройств позиционирования, например, GPS (англ. NAVigation Satellites providing Time And Range; Global Positioning System) или RFID меток (англ. Radio Frequency IDentification, радиочастотная идентификация), установленных в граничных точках зоны работы машин и/или расположенных на объектах (препятствиях) или прикрепленных к ним.
Аналогичные датчики (датчики положения 7) могут быть также размещены вне строительной машины.
Кроме того, в зависимости от варианта исполнения системы в состав датчиков машины 2 могут входить датчики, осуществляющие измерение параметров внешних условий работы машины - уклона рабочей площадки (креномер), скорости ветра (анемометр), температуры окружающей среды, освещенности рабочей площадки и т.п.
Для повышения эффективности защиты группы машин от столкновений в состав датчиков 2 может быть включен датчик расстояния между машинами. Это расстояние, в случае использования беспроводных устройств обмена данными 1, может быть определено по времени прохождения ультразвукового, оптического или электромагнитного сигнала между машинами.
Система может содержать внешний вычислитель 8, соединенный посредством своего устройства обмена данными 9 с устройствами обмена данных 1, расположенных на машинах. Для этого в зависимости от исполнения устройств обмена данными 1, 9 используется проводная (кабель) или беспроводная (радиоканал, оптическая или ультразвуковая) линия связи 10.
В качестве внешнего вычислителя 8 может использоваться стационарная ЭВМ с монитором и с необходимыми периферийными устройствами.
Система безопасности строительных машин работает следующим образом.
Перед началом работы машин производится настройка системы безопасности с целью ее «привязки» к стройплощадке и к установленному рабочему оборудованию машин. Настройка осуществляется машинистом в ручном режиме с помощью органов управления, подключенных к цифровому вычислителю 3 или внешнему вычислителю 8 (на чертеже условно не показано), или путем приема настроечных данных от внешнего вычислителя 8 или от цифрового вычислителя 3 другой машины. Она заключается в установке необходимой конфигурации рабочего оборудования, положения опор, противовеса и т.п. (при их наличии), а также единой системы координат для всех машин, их рабочего оборудования и объектов (препятствий), расположенных на строительной площадке.
После завершения настройки в памяти цифрового вычислителя 3 и, при необходимости, на дисплее 6 отображается план рабочей (строительной) площадки с расположенными на ней объектами (препятствиями), строительными машинами и границами рабочей зоны для каждой машины, определенными из условия предотвращения столкновения каждой строительной машины и ее рабочего оборудования как с препятствиями, так и с другими машинами.
В процессе работы строительных машин границы рабочей зоны (зоны допустимых пространственных положения машины и ее рабочего оборудования) каждой машины непрерывно корректируются цифровым вычислителем 3 с использованием информации, полученной от собственных датчиков 2, датчиков 2 других машин и датчиков положения 7, размещенных вне машины.
Одновременно с помощью датчиков 2 контролируется уровень нагрузки каждой машины. Допустимые режимы нагружения, например, в виде грузовых характеристик машины, предварительно записаны, в зависимости от варианта исполнения системы, в память цифрового вычислителя 3 либо внешнего вычислителя 8.
С использованием этих данных цифровой вычислитель 3, либо внешний вычислитель 8, определяет предельно допустимое значение нагрузки машины. Это значение, в общем случае, зависит от пространственного положения рабочего оборудования машины и от внешних условий эксплуатации (уклона рабочей площадки, скорости ветра и т.д.).
Далее вычислитель 2 или 8 осуществляет сравнение текущего уровня нагрузки машины с предельно допустимым и передачу на выходное устройство 4 предупредительного сигнала для машиниста и/или сигнала блокирования движений машины из условия предотвращения перегрузки машины.
Дополнительно цифровой вычислитель 2 определяет минимальное расстояние от машины и ее рабочего оборудования до границы рабочей зоны. Если это расстояние уменьшается до предельно допустимого значения, цифровой вычислитель 3 аналогичным образом передает на выходное устройство 4 предупредительный сигнал для машиниста и/или сигнал блокирования движений машины из условия предотвращения столкновения машины или ее рабочего оборудования с другой машиной или с подвижными или неподвижными препятствиями (объектами), расположенными в рабочей зоне данной машины (на строительной площадке).
Предельно допустимые значения расстояний до границ рабочей зоны, при которых осуществляется формирование предупредительного сигнала для машиниста и/или сигнала блокирования движений машины, в общем случае зависят от геометрии рабочего оборудования машины (например, от длины стрелы и высоты подъема грузозахватного органа грузоподъемной машины), скорости движения машины и ее рабочего оборудования, инерционности (массы, момента инерции, ускорения торможения) машины и ее оборудования, а также от внешних условий эксплуатации (например, скорости ветра и уклона строительной площадки). Необходимые корректировки этих предельно допустимых значений осуществляются цифровым вычислителем 3 в зависимости от сигналов, полученных от датчиков 2 своей машины, датчиков 2 других машин, а также от стационарных датчиков положения 7.
Программно реализуемые алгоритмы защиты, а также численные значения отдельных параметров в этих алгоритмах зависят от допустимых скоростных и нагрузочных режимов работы каждой строительной машины в различных условиях эксплуатации, которые определяются в процессе проектирования этой строительной машины или экспериментальным путем. Далее они подлежат реализации цифровым вычислителем 3 или внешним вычислителем 8 при проектировании системы безопасности. Эта реализация осуществляется, преимущественно, с использованием математической модели машины, предварительно записанной в виде формул или таблиц в память цифрового вычислителя 3 или внешнего вычислителя 8.
Все виды и направления движений строительных машин, а также значения выходных сигналов датчиков и сигналов в линии обмена данными 10 могут передаваться в запоминающее устройство регистратора параметров и записываться в нем в режиме реального времени для последующего контроля и анализа работы группы строительных машин.
Из изложенного следует, что в данной системе безопасности, в любом варианте ее исполнения, обеспечивается реализация дополнительных функций защиты каждой машины за счет использования технических средств, не входящих в ее приборный комплекс, что обеспечивает повышение безопасности строительных машин при их групповой работе. Например, датчик наличия, параметров (размеров) и пространственного положения каких-либо объектов (препятствий) на строительной площадке, датчик скорости ветра, датчик уклона рабочей площадки и т.д. может быть единственным для всей группы строительных машин и использоваться для реализации функций защиты всех машин в группе. Такое исключение дублирования отдельных составных частей системы безопасности группы строительных машин приводит к упрощению используемых технических средств, их монтажа, технического обслуживания и ремонта.
Необходимость обмена информацией между машинами либо между машиной и внешним вычислителем 8 (стационарным постом управления) исключает возможность автономной работы каждой машины и соответственно исключает возможность несанкционированного доступа к управлению каждой строительной машиной.
Группа изобретений допускает также иные варианты реализации систем безопасности строительных машин при сохранении общего изобретательского замысла.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНЫХ КРАНОВ ОТ СТОЛКНОВЕНИЙ | 2009 |
|
RU2398728C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОЙ ИЛИ СТРОИТЕЛЬНОЙ МАШИНЫ (ВАРИАНТЫ) | 2010 |
|
RU2448037C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ МАШИНЫ С ГРАФИЧЕСКИМ ДИСПЛЕЕМ | 2010 |
|
RU2448036C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ С ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2381171C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ С ДИАГНОСТИРОВАНИЕМ ЕГО ГИДРОСИСТЕМЫ И СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2301192C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2008 |
|
RU2376238C1 |
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2298518C1 |
Система безопасности строительных машин содержит устройства проводного или беспроводного обмена данными, датчики измерения параметров работы машины, датчики или устройство для измерения или задания параметров объектов, расположенных в зоне работы машины, цифровой вычислитель, внешний вычислитель. Цифровой вычислитель выполнен с возможностью передачи в цифровой вычислитель другой машины сигнала, характеризующего параметры работы машины. Цифровой вычислитель другой машины выполнен с возможностью установки или изменения предельно допустимого значения параметра машины в зависимости от принятого сигнала. Достигается повышение безопасности эксплуатации строительных машин при групповой работе. 2 н. и 16 з.п. ф-лы, 1 ил.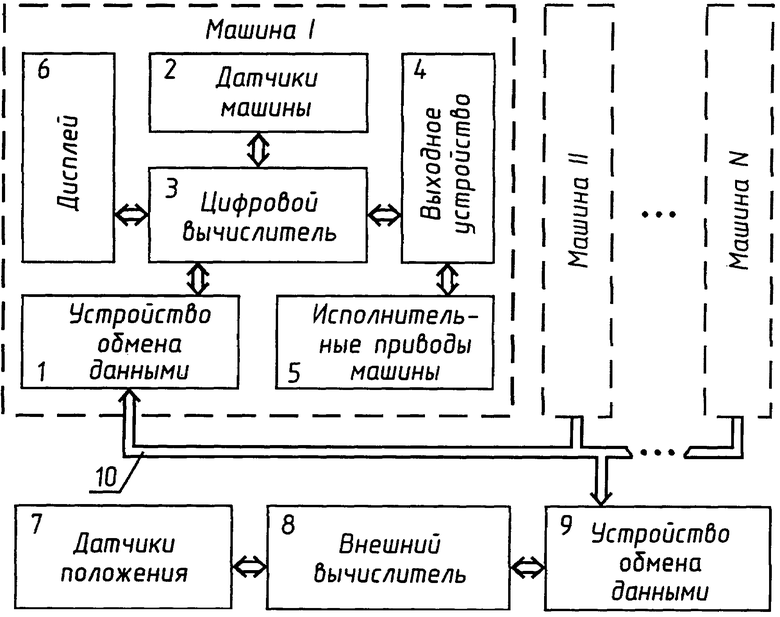
1. Система безопасности строительных машин, содержащая установленное на каждой машине устройство проводного или беспроводного обмена данными, датчики, выполненные с возможностью измерения параметров работы машины, характеризующих нагрузку, и/или пространственное положение машины, и/или пространственное положение ее рабочего оборудования, а также по меньшей мере один датчик или одно устройство для измерения или задания положения или границ, или координат, или параметров подвижных или неподвижных объектов, расположенных в зоне работы машины, цифровой вычислитель, оснащенный выходным устройством и выполненный с возможностью взаимодействия с устройством обмена данными, с возможностью приема и обработки выходных сигналов по меньшей мере одного из указанных датчиков, с возможностью хранения в своей памяти или приема от устройства обмена данными или вычисления по меньшей мере одного предельно допустимого значения параметра работы машины, а также с возможностью формирования и передачи на выходное устройство по меньшей мере одного предупредительного сигнала или сигнала блокирования движений машины из условия предотвращения превышения по меньшей мере одного указанного параметра работы машины его предельно допустимого значения, отличающаяся тем, что цифровой вычислитель одной машины выполнен с возможностью передачи по меньшей мере одного сигнала, характеризующего текущее или предельно допустимое значение параметра работы этой машины, в цифровой вычислитель по меньшей мере одной другой машины с использованием устройств проводного или беспроводного обмена данными, причем цифровой вычислитель другой машины выполнен с возможностью приема этого сигнала и установки или изменения, в зависимости от его величины, по меньшей мере, одного предельно допустимого значения параметра этой машины или предельно допустимой границы значений этого параметра.
2. Система безопасности по п.1, отличающаяся тем, что датчики, выполненные с возможностью измерения положений, и/или границ, и/или координат, и/или параметров подвижных и/или неподвижных объектов, реализованы с использованием средств технического зрения, и/или радиолокационного средства, и/или лазерного сканера, и/или приемника с устройств позиционирования, установленных в граничных точках зоны работы машин и/или расположенных на объектах или прикрепленных к ним, и выполненных, например, в виде GPS или RFID меток.
3. Система безопасности по п.1 или 2, отличающаяся тем, что цифровой вычислитель одной машины выполнен с возможностью указанной передачи в цифровой вычислитель другой машины сигналов, характеризующих положение, и/или координаты, и/или параметры, и/или границы подвижных и/или неподвижных объектов, расположенных в зоне работы машин, а цифровой вычислитель другой машины выполнен с возможностью установки предельно допустимых значений параметров пространственного положения этой машины и/или ее рабочего оборудования, или границ разрешенной рабочей зоны, из условия предотвращения столкновений с этими объектами.
4. Система безопасности по п.3, отличающаяся тем, что она дополнительно оснащена по меньшей мере одним датчиком расстояния между машинами, подключенным к соответствующему цифровому вычислителю, который выполнен с возможностью использования выходного сигнала этого датчика при определении и установке предельно допустимых значений параметров пространственного положения этой машины и/или ее рабочего оборудования или границ разрешенной рабочей зоны, а также с возможностью передачи этого сигнала в цифровой вычислитель другой машины для использования по аналогичному назначению.
5. Система безопасности по п.1 или 2, отличающаяся тем, что она дополнительно оснащена датчиками, установленными на одной машине и выполненными с возможностью измерения параметров, характеризующих внешние условия работы этой машины, а цифровой вычислитель этой машины выполнен с возможностью приема и обработки выходных сигналов этих датчиков, изменения предельно допустимого значения по меньшей мере одного параметра работы машины, а также с возможностью передачи сигналов, содержащих информацию о внешних условиях работы машины, по меньшей мере в один цифровой вычислитель другой машины для использования по аналогичному назначению.
6. Система безопасности по п.5, отличающаяся тем, что по меньшей мере один датчик, характеризующий внешние условия работы машины, выполнен с возможностью измерения величины уклона рабочей площадки, или скорости ветра, или температуры окружающей среды, или освещенности рабочей площадки.
7. Система безопасности по п.1 или 2, отличающаяся тем, что цифровой вычислитель одной машины выполнен с возможностью передачи сигналов о допустимых значениях параметров пространственного положения этой машины и/или ее рабочего оборудования, либо сигналов о границах разрешенной зоны работы, в цифровой вычислитель по меньшей мере одной другой машины, который выполнен с возможностью их приема и использования в качестве предельно допустимых параметров пространственного положения или границ рабочей зоны для своей машины и/или ее рабочего оборудования.
8. Система безопасности по п.7, отличающаяся тем, что она дополнительно оснащена по меньшей мере одним датчиком расстояния между машинами, а цифровой вычислитель каждой машины дополнительно выполнен с возможностью изменения, в зависимости от выходного сигнала этого датчика, предельно допустимых параметров пространственного положения машины и/или ее рабочего оборудования или границ разрешенной рабочей зоны из условия предотвращения столкновений машин и/или их рабочего оборудования.
9. Система безопасности по любому из пп.1, 2, 4, 6 или 8, отличающаяся тем, что значения предельно допустимых параметров пространственного положения машины и/или ее рабочего оборудования или границы разрешенной рабочей зоны определяются и/или устанавливаются цифровым вычислителем с учетом инерции машины и/или ее перемещаемого оборудования.
10. Система безопасности по любому из пп.1, 2, 4, 6 или 8, отличающаяся тем, что она дополнительно содержит графический дисплей, подключенный к цифровому вычислителю, который выполнен с возможностью отображения на экране дисплея условного графического изображения строительных машин на плане строительной площадки и границ разрешенной зоны работы.
11. Система безопасности по любому из пп.1, 2, 4, 6 или 8, отличающаяся тем, что цифровой вычислитель выполнен с возможностью формирования и передачи на выходное устройство сигнала блокирования движений машины в случае отсутствия сигналов от цифрового вычислителя другой машины.
12. Система безопасности строительных машин, содержащая установленное на машине устройство проводного или беспроводного обмена данными, датчики, выполненные с возможностью измерения параметров работы машины, характеризующих нагрузку, и/или пространственное положение машины, и/или ее рабочего оборудования, цифровой вычислитель, оснащенный выходным устройством и выполненный с возможностью взаимодействия с устройством обмена данными, с возможностью приема и обработки выходных сигналов по меньшей мере одного из указанных датчиков, а также с возможностью передачи на выходное устройство по меньшей мере одного предупредительного сигнала или сигнала блокирования движений машины, направленного на предотвращение превышения по меньшей мере одного указанного параметра работы машины его предельно допустимого значения, система безопасности строительных машин дополнительно содержит внешний вычислитель, не входящий в приборный комплекс машины, соединенный с цифровым вычислителем машины посредством устройства проводного или беспроводного обмена данными и выполненный с возможностью хранения в памяти или вычисления по меньшей мере одного предельно допустимого значения параметра работы машины, характеризующего ее нагрузку, формирования указанного предупредительного сигнала или сигнала блокирования движений машины, а также передачи этого сигнала в цифровой вычислитель машины.
13. Система безопасности по п.12, отличающаяся тем, что внешний вычислитель реализован в виде мобильного устройства, или стационарной ЭВМ, или цифровой вычислитель другой машины дополнительно выполнен с возможностью реализации функций внешнего вычислителя данной машины.
14. Система безопасности по п.12 или 13, отличающаяся тем, что внешний вычислитель выполнен с возможностью реализации указанных функций защиты от перегрузки группы строительных машин.
15. Система безопасности по п.12 или 13, отличающаяся тем, что она дополнительно оснащена датчиками положения, и/или координат, и/или границ, и/или параметров подвижных и/или неподвижных объектов, расположенных в зоне работы машины, причем эти датчики размещены на машине или на стационарном объекте и посредством устройства проводного и/или беспроводного обмена данными или непосредственно соединены с внешним вычислителем, который дополнительно выполнен с возможностью определения значений предельно допустимых параметров пространственного положения машины и/или ее рабочего оборудования или границ разрешенной рабочей зоны, а также формирования предупредительного сигнала и/или сигнала блокирования движений машины из условия предотвращения столкновения машины с этими препятствиями и передачи этого сигнала в цифровой вычислитель машины.
16. Система безопасности по п.15, отличающаяся тем, что она дополнительно оснащена по меньшей мере одним датчиком расстояния между машинами и/или датчиками пространственных положений машин и/или их рабочего оборудования на строительной площадке, который/которые размещен/размещены на машине или на стационарном объекте и посредством устройства проводного и/или беспроводного обмена данными или непосредственно соединен/соединены с внешним вычислителем, который дополнительно выполнен с возможностью определения значений предельно допустимых параметров пространственного положения машин и/или их рабочего оборудования или границ разрешенной рабочей зоны, а также формирования предупредительного сигнала и/или сигнала блокирования движений машины из условия предотвращения столкновения машин.
17. Система безопасности по п.15, отличающаяся тем, что датчики, выполненные с возможностью измерения положений, и/или координат, и/или границ, и/или параметров подвижных и/или неподвижных объектов, реализованы с использованием средств или устройств технического зрения, и/или радиолокационного средства, и/или лазерного сканера, и/или приемника с устройств позиционирования, установленных в граничных точках зоны работы машин и/или расположенных на объектах или прикрепленных к ним, и выполненных, например, в виде GPS или RFID меток.
18. Система безопасности по любому и пп.12, 13, 16 или 17, отличающаяся тем, что цифровой вычислитель выполнен с возможностью формирования и передачи на выходное устройство сигнала блокирования движений машины в случае отсутствия сигналов от внешнего вычислителя.
| CN 201321356 Y, 07.10.2009 | |||
| JP 2000313588 А, 14.11.2000 | |||
| Приспособление к трепальному колесу или барабану для трепания льна или пеньки | 1925 |
|
SU3000A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| - Найдено в Интернет | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| - найдено в Интернет: <URL: | |||

