Изобретение относится к области машиностроения и может быть использовано в системах управления и защиты от перегрузок и повреждений грузоподъемных кранов.
Известен способ защиты грузоподъемного крана, включающий формирование сигналов управления грузоподъемным краном путем воздействия на органы ручного управления его исполнительными устройствами, предварительное, например расчетным путем при проектировании крана, определение величин нагрузок, допустимых для различных пространственных положений его стрелы, задание параметров зоны допустимых положений стрелы, их запоминание, измерение в процессе работы крана параметров текущего пространственного положения стрелы и текущей нагрузки крана, их сравнение с допустимыми значениями и последующее отключение сформированных в ручном режиме сигналов управления исполнительными устройствами крана или формирование информационного предупреждающего сигнала для крановщика, если текущее значение, по меньшей мере, одного параметра превышает допустимое [1, 2].
Устройство для осуществления этого способа содержит электрогидравлические распределители с ручным управлением, а также, по меньшей мере, один электрогидравлический клапан и датчики параметров грузоподъемного крана, подключенные к цифровому электронному вычислителю [1, 2].
В известном способе и реализующем его устройстве сигналы управления исполнительными устройствами крана формируются крановщиком в ручном режиме независимо от нагрузки крана и положения его грузоподъемного оборудования и далее поступают на исполнительные механизмы крана или блокируются электрогидравлическим клапаном. Поэтому в случае отказа электронного вычислителя управление краном не прекращается, что приводит к снижению надежности защиты крана.
Наиболее близким к предложенному является способ управления грузоподъемным краном с реализацией функций его защиты от перегрузки и повреждения путем формирования сигналов управления исполнительными устройствами грузоподъемного крана с помощью электронного аппарата управления при перемещении крановщиком рукоятки этого аппарата в направлениях, соответствующих выполнению различных крановых операций, и преобразования этих перемещений в сигналы управления соответствующими исполнительными устройствами грузоподъемного крана, а также путем предварительного определения допустимых значений параметров, характеризующих нагрузку и пространственное положение стрелы или грузозахватного органа грузоподъемного крана, измерения в процессе работы крана прямым или косвенным методом, по меньшей мере, одного из указанных параметров, сравнения его измеренного значения с допустимым и последующего формирования предупреждающего сигнала для крановщика или сигналов разрешения управления соответствующими исполнительными устройствами грузоподъемного крана в зависимости от результата этого сравнения [3].
Система управления грузоподъемного крана, реализующая этот способ, содержит, по меньшей мере, один аппарат управления, реализованный на основе микроконтроллера и выполненный с возможностью формирования сигналов управления исполнительными устройствами грузоподъемного крана в зависимости от перемещений рукоятки этого аппарата в направлениях, соответствующих выполнению различных крановых операций, а также датчики параметров работы грузоподъемного крана и цифровой электронный вычислитель, реализованный на основе микроконтроллера, к которому подключены указанные датчики и аппарат управления [3].
В известном техническом решении при возникновении опасных режимов работы крана - при перегрузке крана по грузовому моменту, при выходе грузоподъемного оборудования из заданной предельно-допустимой зоны по координатной защите и т.д. сигналы управления исполнительными механизмами крана не блокируются на какой-либо промежуточной стадии, а не формируются изначально. Это повышает надежность защиты крана.
Однако при этом не достигается существенного повышения безопасности работы крана и удобства работы крановщика, поскольку в указанном техническом решении не обеспечивается возможность изменения параметров сигналов управления в зависимости от вида выполняемой крановой операции, от режима работы крана. Отсутствует также возможность устанавливать различные параметры сигналов управления в зависимости от нагрузки и от пространственного положения стрелы или вылета грузозахватного органа, не осуществляется анализ возможности совмещения отдельных грузоподъемных операций, отсутствует возможность автоматического переключения системы из режима с одновременным управлением двумя и более грузоподъемными операциями в режим без совмещения этих операций. Не осуществляется также и автоматический выбор приоритетного, с точки зрения безопасности управления, исполнительного устройства в различных режимах работы крана.
Кроме того, усилие, прикладываемое крановщиком к рукоятке аппарата управления, в известном техническом решении не зависит от режима работы, от нагрузки и пространственного положения грузозахватного органа крана. Поэтому крановщик не ощущает приближения параметров работы крана к предельным значениям, что также снижает как безопасности работы, так и удобство управления краном.
Техническим результатом заявленного изобретения является повышение эффективности защиты грузоподъемного крана и, соответственно, повышение безопасности его работы. Дополнительным результатом является повышение удобства работы крановщика. Это достигается за счет реализации:
- изменения параметров сигналов управления исполнительными устройствами в зависимости от вида выполняемой крановой операции и от режима работы крана, в частности установки различных скоростей подъема и опускания груза, более медленного поворота крановой установки при работе с длинной стрелой (с гуськом) и т.п.;
- установки параметров сигналов управления в зависимости от параметров работы крана, в частности уменьшение/увеличение допустимой скорости выполнения грузоподъемных (крановых) операций при увеличении/уменьшении нагрузки или вылета грузозахватного органа крана;
- определения возможности совмещения отдельных грузоподъемных операций, в частности в зависимости от параметров работы крана - от текущего значения нагрузки (грузового момента) и/или вылета грузозахватного органа, а также автоматического переключения системы с режима одновременного управления двумя и более грузоподъемными операциями (устройствами) на режим без совмещения этих операций;
- автоматического выбора исполнительного устройства крана, подлежащего управлению в приоритетном порядке, в различных режимах работы крана и при различных значениях параметров его работы;
- автоматической установки усилия противодействия перемещению крановщиком рукоятки аппарата управления в зависимости от режима работы, нагрузки и/или пространственного положения стрелы или грузозахватного органа грузоподъемного крана, а также применения вибрации рукоятки управления в наиболее опасных режимах работы грузоподъемного крана.
В предложенном способе управления грузоподъемным краном путем предварительного определения допустимых значений параметров, характеризующих нагрузку и/или пространственное положение его стрелы или грузозахватного органа, их запоминания, измерения в процессе работы грузоподъемного крана прямым или косвенным методом, по меньшей мере, одного из указанных параметров, сравнения его измеренного значения с допустимым и последующего формирования сигналов управления исполнительными устройствами грузоподъемного крана в зависимости от результата этого сравнения и от перемещения крановщиком рукоятки аппарата управления в направлениях, соответствующих выполнению различных крановых операций, указанный технический результат достигается за счет того, что, по меньшей мере, один параметр формируемого сигнала управления, по меньшей мере, одним исполнительным устройством грузоподъемного крана устанавливают в зависимости от выполняемой крановой операции и/или от направления перемещения рукоятки аппарата управления, и/или от величины перемещения рукоятки аппарата управления, и/или от измеренного значения, по меньшей мере, одного параметра, характеризующего режим работы и/или нагрузку, и/или пространственное положение стрелы или грузозахватного органа грузоподъемного крана, причем эту зависимость предварительно определяют из условия обеспечения безопасной работы грузоподъемного крана и/или удобства работы крановщика и реализуют в конструкции и/или в программе работы микропроцессорной системы управления этого крана.
Указанный сигнал управления исполнительными устройствами грузоподъемного крана используют, в частности, для задания скорости перемещения стрелы или грузозахватного органа грузоподъемного крана при выполнении соответствующей крановой операции, причем большему значению перемещения рукоятки аппарата управления соответствует большее значение скорости. При этом задаваемую скорость перемещения стрелы или грузозахватного органа грузоподъемного крана уменьшают при увеличении действительного значения параметра, характеризующего величину нагрузки и/или вылета грузозахватного органа грузоподъемного крана, или устанавливают в зависимости от соотношения измеренного и допустимого значений параметра, характеризующего нагрузку и/или пространственное положение стрелы или грузозахватного органа грузоподъемного крана. В частности, задаваемую скорость перемещения стрелы или грузозахватного органа грузоподъемного крана уменьшают при приближении указанного соотношения к единичному значению. Эта скорость может также устанавливаться различной для различных направлений перемещения рукоятки аппарата управления. В этом случае она выбирается в соответствии с безопасной для грузоподъемного крана или наиболее удобной для крановщика скоростью выполнения соответствующей крановой операции.
Для достижения необходимого технического результата дополнительно может определяться возможность одновременного выполнения двух или более крановых операций с запоминанием признака такой возможности в виде функции, по меньшей мере, одного параметра, характеризующего нагрузку и/или пространственное положение стрелы или грузозахватного органа грузоподъемного крана. При отсутствии такой возможности определяют и запоминают признак приоритета выполнения крановых операций, а в процессе работы грузоподъемного крана выявляют наличие отклонения крановщиком рукоятки аппарата управления в направлениях, соответствующих выполнению двух различных крановых операций, или отклонения рукояток двух аппаратов управления, а после измерения текущего значения указанного параметра, характеризующего нагрузку и/или пространственное положение стрелы или грузозахватного органа грузоподъемного крана, считывают запомненное значение признака возможности совмещения и, при необходимости, признака приоритета выполняемой крановой операции, в соответствии с которым/которыми осуществляют указанное формирование сигналов управления исполнительными устройствами грузоподъемного крана.
В частности, признак возможности одновременного выполнения двух или более крановых операций устанавливают при значении параметра, характеризующего отсутствие нагрузки или наличие нагрузки грузоподъемного крана, не превышающей предварительно установленной величины, или при значении параметра, характеризующего, что вылет грузозахватного органа не превышает предварительно установленную величину. Признак приоритета выполняемых крановых операций может также устанавливаться из условия минимально возможного приближения параметров, характеризующих нагрузку и/или пространственное положение его стрелы или грузозахватного органа, к их допустимым значениям.
Для повышения безопасности работы грузоподъемного крана и удобства управления дополнительно создают усилие противодействия перемещению крановщиком рукоятки аппарата управления и устанавливают величину этого усилия в зависимости от измеренного значения параметра, характеризующего режим работы и/или нагрузку, и/или пространственное положение стрелы или грузозахватного органа грузоподъемного крана. Это усилие, в частности, устанавливают в зависимости от соотношения измеренного и допустимого значений указанного параметра и, при приближении этого соотношения к единичному значению существенно увеличивают это усилие или осуществляют его периодические изменения (вибрацию рукоятки управления).
В системе управления грузоподъемного крана, реализующей предложенный способ и содержащей, по меньшей мере, один аппарат управления, реализованный на основе микроконтроллера и выполненный с возможностью формирования сигналов управления исполнительными устройствами грузоподъемного крана в зависимости от перемещений рукоятки этого аппарата управления в направлениях, соответствующих выполнению различных крановых операций, датчики нагрузки и/или пространственного положения стрелы или грузозахватного органа грузоподъемного крана и вычислитель, реализованный на основе микроконтроллера, причем указанный аппарат управления и датчики подключены к вычислителю, который выполнен с возможностью запоминания допустимых значений параметров работы грузоподъемного крана, измеренных с помощью упомянутых датчиков, сравнения измеренных значений с допустимым, а также с возможностью формирования предупреждающего сигнала и/или с возможностью задания сигнала разрешения или блокирования формирования, по меньшей мере, одного сигнала управления исполнительными устройствами грузоподъемного крана в зависимости от результата этого сравнения, указанный технический результат достигается за счет того, что аппарат управления содержит, по меньшей мере, один датчик величины и направления перемещения его рукоятки, подключенный к его микроконтроллеру, и выполнен с возможностью изменения минимального и/или максимального значения формируемого сигнала управления и/или изменения функциональной зависимости значения этого сигнала управления от выходного сигнала указанного датчика и/или от сигнала, характеризующего режим работы и/или нагрузку, и/или пространственное положение стрелы или грузозахватного органа грузоподъемного крана. Указанный сигнал управления может быть подключен к входу задания скорости исполнительного устройства грузоподъемного крана, а аппарат управления выполнен с возможностью увеличения этого сигнала при увеличении выходного сигнала датчика перемещения его рукоятки.
Аппарат управления может быть выполнен с возможностью уменьшения сигнала управления исполнительными устройствами при увеличении сигнала нагрузки и/или вылета грузозахватного органа грузоподъемного крана или с возможностью вычисления отношения измеренного и допустимого значений параметра, характеризующего нагрузку и/или пространственное положение стрелы или грузозахватного органа грузоподъемного крана и с возможностью формирования сигнала управления в зависимости от этого отношения, в том числе с возможностью уменьшения сигнала управления при приближении указанного отношения к единичному значению, или с возможностью изменения величины формируемого сигнала управления в зависимости от выходного сигнала датчика направления перемещения его рукоятки.
Для достижения необходимого технического результата вычислитель может быть выполнен с возможностью программного определения допустимости одновременного формирования сигналов управления двумя или более исполнительными устройствами грузоподъемного крана и, в случае невозможности их одновременного формирования с точки зрения безопасности, с возможностью определения приоритета формирования указанных сигналов в зависимости от значений выходных сигналов датчиков нагрузки и/или пространственного положения стрелы или грузозахватного органа грузоподъемного крана. В этом случае аппарат управления исполнительными устройствами грузоподъемного крана выполнен с возможностью формирования сигналов управления с учетом указанной допустимости одновременного формирования сигналов управления и их приоритета. При этом вычислитель выполняется, в частности, с возможностью сравнения измеренной нагрузки или измеренного вылета грузозахватного органа грузоподъемного крана с предварительно установленными и запомненными величинами и с возможностью программного формирования сигнала, разрешающего одновременное формирование двух и более сигналов управления исполнительными устройствами, если измеренная нагрузка или вылет не превышают установленных величин.
Вычислитель может быть выполнен также с возможностью автоматического выбора программным путем одного из допустимых сигналов управления исполнительными устройствами грузоподъемного крана из условия обеспечения минимального приближения значений сигналов нагрузки и/или пространственного положения стрелы или грузозахватного органа к допустимым значениям.
Кроме того, аппарат управления дополнительно может содержать электромеханическое, электрогидравлическое или электропневматическое устройство возврата его рукоятки в нейтральное положение, к которому подключен сигнал управления этим устройством. В этом случае вычислитель выполнен с возможностью формирования этого сигнала управления в соответствии с предварительно установленной и запомненной зависимостью этого сигнала от режима работы и/или нагрузки, и/или пространственного положения стрелы или грузозахватного органа грузоподъемного крана, а устройство возврата выполнено с возможностью изменения усилия перемещения рукоятки аппарата управления в соответствии с указанным сигналом управления. Сигнал управления устройством возврата может устанавливаться, в частности, в зависимости от соотношения измеренного и допустимого значений сигналов нагрузки и/или пространственного положения стрелы или грузозахватного органа грузоподъемного крана. При приближении указанного соотношения к единичному значению сигнал управления устройством возврата может существенно увеличиваться и/или переходить в режим периодического изменения (в режим механической вибрации рукоятки управления).
Реализация указанных отличительных признаков позволяет:
- изменять параметры сигналов управления исполнительными устройствами грузоподъемного крана в зависимости от вида выполняемой крановой операции, от режима работы крана и от направления перемещения рукоятки аппарата управления, в частности устанавливать безопасные для грузоподъемного крана и наиболее удобные для работы крановщика различные скорости подъема и опускания груза, более медленный поворот крановой установки при работе с длинной стрелой (с гуськом) и т.п.;
- устанавливать параметры сигналов управления в зависимости от параметров работы крана, в частности автоматически уменьшать или увеличивать скорости выполнения крановых операций при увеличении или уменьшении нагрузки или вылета грузозахватного органа крана, что уменьшает максимальные нагрузки на грузоподъемный кран в динамических режимах его работы и снижает вероятность ошибок крановщика в наиболее опасных режимах работы грузоподъемного крана;
- автоматически разрешать или запрещать совмещение различных грузоподъемных (крановых) операций или отдельных движений грузоподъемного крана, в частности автоматически запрещать одновременное выполнение грузоподъемных операций в наиболее нагруженных или в наиболее опасных режимах работы грузоподъемного крана, что также приводит к повышению безопасности его работы;
- автоматически включать в работу одно из исполнительных устройств грузоподъемного крана, соответствующее его наиболее безопасной работе, если крановщик предпринимает попытку осуществить одновременное управление различными механизмами крана в опасных режимах его работы;
- автоматически устанавливать усилие перемещения крановщиком рукоятки аппарата управления в зависимости от режима работы, нагрузки и/или пространственного положения стрелы или грузозахватного органа грузоподъемного крана, а также осуществлять механическую вибрацию рукоятки управления в наиболее опасных режимах работы грузоподъемного крана, что позволяет крановщику ощущать работу грузоподъемного крана и, соответственно, также повышает безопасность работы крана и удобство управления.
Поэтому реализация указанных отличительных признаков заявленного технического решения находится в прямой причинно-следственной связи с достижением указанного технического результата.
На чертеже в качестве примера приведена функциональная схема системы управления грузоподъемного крана с реализацией функций его защиты от перегрузки и повреждения, реализующей предложенный способ.
Система содержит вычислитель 1, а также аппарат управления 2 и датчики параметров работы грузоподъемного крана (датчики нагрузки, пространственного положения стрелы и грузозахватного органа) 3, соединенные с вычислителем 1 при помощи мультиплексной линии связи (CAN, LIN и т.п.) или отдельных проводов.
Аппарат управления 2 подключен к электрогидравлическим или электромеханическим исполнительным устройствам грузоподъемного крана 4, в качестве которых могут использоваться, например, гидравлические распределители с электрическим управлением, в частности пропорционального действия, с соответствующими гидромоторами, гидроцилиндрами и т.п., или электродвигатели с соответствующей пускорегулирующей аппаратурой. Типичным входным сигналом исполнительного устройства 4 является, например, ток пропорционального электромагнита, определяющий скорость перемещения какого-либо механизма крана, или электрическое напряжение, задающее скорость вращения кранового электродвигателя.
Система может иметь два и более аппарата управления 2, которые подключаются к вычислителю 1 и к исполнительным устройствам 4 аналогичным образом.
Вычислитель 1, который может именоваться также «блоком обработки данных», «цифровой вычислительной машиной», «блоком управления и индикации», «контроллером» и т.п., включает в себя микроконтроллер 5 и подключенные к нему органы управления (клавиатуру) 6, световые, графические, символьные, световые и (или) звуковые индикаторы 7, запоминающее устройство 8, выполненное, например, на основе микросхем Flash-памяти, часы реального времени (специализированную микросхему с кварцевым резонатором и автономным источником питания) 9 и устройство ввода/вывода информации 10. Вычислитель 1, при необходимости, может содержать дополнительные функциональные блоки, не показанные на чертеже, например блок аутентификации личности крановщика, отдельный блок памяти регистратора параметров, устройство связи с диспетчерским пунктом и т.п. Отдельные функциональные блоки, показанные на чертеже, могут быть также исключены из состава вычислителя 1.
Датчики параметров работы крана 3 могут включать в себя датчик нагрузки или веса поднимаемого груза (датчик силы или датчики давления), датчик длины стрелы, датчик угла азимута (угла поворота крана), датчик угла наклона стрелы, датчик предельного подъема грузозахватного органа, датчик приближения к линии электропередачи, датчики продольного и поперечного наклона крана, датчик положения противовеса (особенно для крана-трубоукладчика), датчики положений исполнительных механизмов крана и т.д. Необходимый состав датчиков 3 определяется конструкцией конкретного грузоподъемного крана, на который устанавливается система управления и защиты, и вариантом реализации предложенного технического решения.
Аппарат управления 2 - аппарат ручного управления грузоподъемным краном реализован на основе встроенного в него микроконтроллера 11 и подключенных к этому микроконтроллеру устройства ввода/вывода информации 12, датчика направления и величины перемещения 13 рукоятки управления 14 и выходного устройства 15, выполненного в виде набора силовых электронных ключей или силовых регуляторов тока, выходы которого подключены к исполнительным устройствам 4 грузоподъемного крана.
Аппарат управления 2 может дополнительно содержать электромеханическое, электрогидравлическое или электропневматическое устройство возврата 16 рукоятки 14 этого аппарата управления 2 в исходное или нейтральное положение, соответствующее выключенному состоянию исполнительных устройств 4. Устройство возврата 16 обеспечивает изменение усилия, которое необходимо приложить крановщику к рукоятке 14 для ее перемещения в направлениях, соответствующих выполнению различных крановых операций. Величина этого усилия устанавливается в соответствии со значением сигнала управления, поступающего на устройство возврата 16 от микроконтроллера 11 (непосредственно или через устройство ввода/вывода информации 12). Этот сигнал управления может быть аналоговым (в этом случае микроконтроллер 11 или устройство ввода/вывода информации 12 содержит соответствующий цифроаналоговый преобразователь), цифровым последовательным или параллельным, или в виде широтно-модулированного сигнала.
Устройство возврата 16 может быть выполнено, в частности, в виде исполнительного механизма - позиционера, регулирующего усилие возвратной пружины рукоятки 14 аппарата управления 2, пневмоцилиндра с регулируемым в нем давлением и т.п.
Устройства ввода/вывода информации 10, 12 вычислителя 1 и аппарата управления 2, обеспечивающие согласование логических уровней входных и выходных сигналов их микроконтроллеров 5,11 с внешними линиями связи и с датчиками 3, могут быть выполнены на базе микросхем трансиверов, приемопередатчиков или драйверов последовательного мультиплексного канала обмена данными.
Если датчики 3 имеют аналоговый выходной сигнал, то устройство ввода/вывода информации 10 содержит аналого-цифровой преобразователь, либо микроконтроллер 5 применяется со встроенным аналого-цифровым преобразователем. В этом случае устройство ввода/вывода информации 10 содержит устройства защиты входов аналого-цифрового преобразователя от перенапряжений, усилители аналоговых сигналов и т.п. Возможно также применение различных и отдельных схем обмена данными между вычислителем 1, аппаратом управления 2 и датчиками 3.
В общем случае передача этих данных является двунаправленной, т.е. микроконтроллеры 5 и 11 в процессе своей работы могут осуществлять взаимный обмен данными, а информация о нагрузке, пространственном положении стрелы и грузозахватного органа грузоподъемного крана и т.д., полученная при помощи датчиков 3, от этих датчиков может передаваться не только в вычислитель 1, но и в аппарат управления 2.
Поясним суть предложенного способа на примере работы реализующего его устройства.
Перед началом работы грузоподъемного крана в память микроконтроллера 5 или в запоминающее устройство 8 вычислителя 1 предварительно записываются величины нагрузок, допустимых для различных пространственных положений стрелы или грузозахватного органа крана. Эти величины определяются, как правило, расчетным путем при проектировании крана и представлены в виде его грузовых характеристик.
Кроме того, предварительно, например, при проектировании системы управления и защиты грузоподъемного крана, на основании параметров и характеристик крана, правил безопасного производства грузоподъемных работ, технологических карт, планов производства грузоподъемных работ или других технических или технологических регламентов, определяются и заносятся в память микроконтроллера 5 или в запоминающее устройство 8:
- значения максимально возможных безопасных для крана скоростей перемещения различных механизмов крана, соответствующих максимальному отклонению рукоятки 14 аппарата управления 2, а также значения этих скоростей для промежуточных положений рукоятки 14 (т.е. максимальное значение и вид характеристик управления различными исполнительными устройствами крана);
- признаки возможности совмещения крановых операций (одновременного подъема груза и поворота крановой платформы и т.п.);
- признаки, задающие приоритет включения в работу различных исполнительных устройств (механизмов) крана, если совмещение крановых операций недопустимо, а крановщик пытается их осуществить.
Эти значения и признаки сохраняются в памяти в виде функций выполняемой крановой операции (направления перемещения рукоятки 14 аппарата управления 2), режима работы крана и параметров его работы - значений нагрузки, положения стрелы, положения грузозахватного органа и т.п. Эти функции устанавливаются для каждой модели крана и могут быть представлены в виде формул, таблиц и т.п., что не имеет принципиального значения. Запись указанных значений и признаков может осуществляться при изготовлении вычислителя 1, а также при эксплуатации крана с помощью органов управления (клавиатуры) 6. С учетом того, что микроконтроллеры 5 и 11 вычислителя 1 и аппарата управления 2 выполнены с возможностью обмена информацией, отдельные значения и признаки могут записываться и храниться также в памяти микроконтроллера 11.
Дополнительно, перед началом работы грузоподъемного крана, крановщик при помощи клавиатуры 6 осуществляет установку режима и параметров работы грузоподъемного крана, характеризующих его геометрию, условия работы и максимально-допустимые значения отдельных рабочих параметров. К ним относятся ограничения по координатной защите (максимально-допустимые значения отдельных координат пространственного положения стрелы и грузозахватного органа), вид используемого стрелового оборудования (наличие, длина и угол наклона гуська), характеристики опорного контура и т.д.
Микроконтроллер 5 вычислителя 1 работает по программе, записанной в его встроенной памяти программ или в запоминающем устройстве 8, и через устройство ввода/вывода информации 10 осуществляет обмен данными с датчиками 3 по общему мультиплексному каналу или по отдельным проводам. После получения информации от датчиков 3 микроконтроллер 5 определяет текущие (действительные) значения параметров работы крана - текущую нагрузку крана, фактическое положение его грузоподъемного (стрелового) оборудования и, при необходимости, дополнительные рабочие параметры - продольный и поперечный наклон крана, высоту подъема грузозахватного органа и т.д. При необходимости, для определения текущих значений этих параметров, осуществляются необходимые вычисления и преобразования выходных сигналов датчиков 3, в том числе с использованием математической модели крана, записанной в запоминающем устройстве 8. Это имеет место в случае измерения параметров работы крана косвенными методами, например при определении нагрузки стрелового гидравлического крана по давлениям в штоковой и поршневой полостях гидроцилиндра подъема стрелы, при определении вылета с учетом прогиба стрелы и т.д. Алгоритмы этих преобразований известны и реализуются программно микроконтроллером 5.
Микроконтроллер 5 осуществляет сравнение текущего положения стрелы или грузозахватного органа с пороговыми (допустимыми) уровнями, заданными крановщиком при введении параметров координатной защиты, а также сравнение текущей нагрузки крана с запомненной допустимой нагрузкой для текущего пространственного положения стрелы или грузозахватного органа. Далее, в зависимости от результатов этого сравнения, т.е. при приближении стрелы крана к границам разрешенной зоны работы по координатной защите или в случае превышения максимально допустимой нагрузки крана, микроконтроллер 5 формирует предупреждающие сигналы, поступающие на индикаторы 7, или сигналы запрета управления исполнительными устройствами, которые через устройство ввода/вывода информации 10 поступают на аппарат управления 2.
Если микроконтроллер 5 формирует сигнал запрета управления каким-либо исполнительным устройством 4 крана, то микроконтроллер 11 аппарата управления 2 не формирует и не подает на выходное устройство 15 сигнал управления этим исполнительным устройством 4 независимо от воздействия крановщика на рукоятку 14 аппарата управления 2, т.е. независимо от выходного сигнала датчика перемещения 13. Благодаря этому осуществляется координатная защита и защита крана от перегрузки.
Передаваемые от микроконтроллера 5 в микроконтроллер 11 сигналы разрешения/запрета работы каждого исполнительно устройства формируются с учетом признаков возможности совмещения крановых операций и признаков, определяющих приоритет включения в работу различных исполнительных устройств (механизмов) крана, если совмещение крановых операций недопустимо, а крановщик пытается их осуществить. Как правило, совмещение крановых операций возможно при малой нагрузке крана и при малом значении вылета грузозахватного органа и запрещено, если эти параметры имеют повышенные значения.
Если микроконтроллер 5 определяет, что управление каким-либо исполнительным устройством 4 возможно, то микроконтроллер 5 вычислителя 1, одновременно с передачей в микроконтроллер 11 признака такой возможности, анализируя значения параметров и режимов работы крана, с использованием запомненных функциональных зависимостей определяет максимально возможное значение параметра, характеризующего управляющее воздействие на это исполнительное устройство 4. Таким параметром обычно является скорость перемещения механизма крана, соответствующего этому исполнительному устройству 4, например скорость подъема груза грузовой лебедкой, скорость поворота крановой установки и т.д. Если же в системе для отдельных механизмов крана реализуется позиционное управление, то таким параметром может быть перемещение этих механизмов.
Максимально возможное значение этого параметра задает максимально возможное управляющее воздействие на одно из исполнительных устройств 4, формируемое микроконтроллером 11 при максимальном отклонении рукоятки 14 аппарата управления 2. Если при этом рукоятка 14 находится в промежуточном положении, то значение управляющего воздействия на исполнительное устройство 4 также имеет промежуточное значение.
Благодаря этому, для всех разрешенных крановых операций осуществляется ограничение максимального значения управляющего воздействия на исполнительные устройства 4, что повышает безопасность работы крана. При этом для управления всегда используется полный ход рукоятки 14 аппарата управления 2, что повышает удобство управления.
Для дополнительного повышения удобства управления краном микроконтроллер 5 передает в микроконтроллер 11 информацию о наиболее удобной для крановщика зависимости формируемого сигнала управления исполнительным устройством 4 от перемещения (угла поворота) рукоятки 14 аппарата управления 2. Эта зависимость реализуется программно микроконтроллером 11 и может быть линейной, квадратичной, линейной с начальным скачком при отклонении от рукоятки от нейтрального положения и т.д.
В отдельных случаях, в зависимости от конструкции грузоподъемного крана и вида выполняемой крановой операции, максимально возможное значение параметра управления каким-либо исполнительным устройством определяется исходя не из безопасности работы крана, а из удобства работы крановщика. К этим случаям относится, например, операция выдвижения опор грузоподъемного крана, при которой чрезмерно быстрое выдвижение безопасно для крана, но неудобно для крановщика.
Для дальнейшего повышения безопасности крана и удобства работы крановщика в предложенном техническом решении осуществляется автоматическое изменение величины усилия, которое крановщику необходимо приложить к рукоятке 14 аппарата управления 2 для выполнения каждой грузоподъемной операции. Для этого аппарат управления 2 дополнительно оснащается электромеханическим, электрогидравлическим или электропневматическим устройством возврата 16 его рукоятки 14 в нейтральное положение. Величина усилия, создаваемого этим устройством 16, определяется сигналом, поступающим на его вход от микроконтроллера 11, который, в свою очередь, формируется микроконтроллером 5 вычислителя 1 в зависимости от режима работы, нагрузки и пространственного положения стрелы или грузозахватного органа грузоподъемного крана.
Вид этой функциональной зависимости зависит от конструкции грузоподъемного крана и особенностей выполняемых грузоподъемных операций, предварительно определяется при разработке системы управления и защиты исходя из максимального удобства работы крановщика и записывается в память микроконтроллера 5 или в запоминающее устройство 8 вычислителя 1. В частности, величина этого усилия устанавливается в зависимости от соотношения измеренного и допустимого значений какого-либо параметра работы крана и существенно увеличивается при приближении этого соотношения к единичному значению. Кроме того, при приближении этого соотношения к единичному значению, т.е. при приближении какого-либо параметра к его предельно-допустимому значению, усилие на рукоятке 14 может не только существенно увеличиваться, но и периодически изменяться (рукоятка управления может вибрировать).
В итоге, если, например, происходит увеличение грузового момента за счет увеличения вылета при опускании стрелы, то в начале выполнения этой грузоподъемной операции опускание стрелы происходит с максимальной скоростью, а усилие, прикладываемое крановщиком к рукоятке 14 аппарата управления 2, невелико. При этом крановщик, изменяя положение рукоятки управления 14, может изменять эту скорость от указанного максимального значения до нулевого.
В дальнейшем, если крановщик оставляет положение рукоятки 14 аппарата управления 2 неизменным, происходит автоматическое снижение скорости опускания стрелы - система фиксирует увеличение вылета и увеличение загрузки крана по грузовому моменту и автоматически снижает скорость опускания стрелы до безопасной величины. Одновременно устройство 16 увеличивает усилие возврата рукоятки 14 в нейтральное положение. Поэтому крановщику необходимо прикладывать все большее усилие для управления краном. Далее, при приближении нагрузки крана или вылета к предельно-допустимому значению, усилие на рукоятке не только достигает максимального значения, но и начинает периодически изменяться, создавая вибрацию. В итоге, создается противодействующая реакция рукоятки 14 на управляющее воздействие крановщика, существенно возрастающая при приближении крана к опасным режимам его работы, а крановщик ощущает своей рукой приближение этой опасности. Благодаря этому повышается безопасность работы крана, а работа крановщика становится более удобной.
Аналогичным образом осуществляется работа системы в других режимах работы крана. Например, при реализации координатной защиты также осуществляется автоматическое снижение скорости перемещения стрелы при ее приближении к границе разрешенной зоны работы (к препятствию), а усилие на рукоятке 14 аппарата управления 2 также возрастает при приближении к этой границе.
При необходимости, в предложенной системе осуществляется регистрация параметров работы крана и параметров формируемых сигналов управления исполнительными устройствами крана 4. Для этого микроконтроллер 5 осуществляет запись этих параметров, а также время их появления, определяемое при помощи часов реального времени 9, в запоминающее устройство 8. Считывание записанной информации может осуществляться либо через мультиплексный канал обмена данными, либо через дополнительные входы/выходы устройства ввода/вывода информации 10 вычислителя 1.
Из изложенного следует, что реализация отличительных признаков предложенного технического решения обеспечивает повышение эффективности защиты и, соответственно, безопасности работы грузоподъемного крана и повышение удобства работы крановщика. Это достигается за счет реализации изменения параметров сигналов управления исполнительными устройствами крана в зависимости от вида выполняемой крановой операции и от режима работы крана, установки параметров сигналов управления в зависимости от параметров работы крана, автоматического определения возможности совмещения отдельных грузоподъемных (крановых) операций, автоматического выбора исполнительного устройства крана, подлежащего управлению в приоритетном порядке, а также автоматической установки усилия противодействия перемещению крановщиком рукоятки аппарата управления в зависимости от режима работы, нагрузки и пространственного положения стрелы или грузозахватного органа грузоподъемного крана.
Источники информации
1. Патент US 5730305 А, МПК 6 В66С 13/16, 13/18, 24.03.1998.
2. Патент RU 2151732 С1, МПК 7 В66С 15/00, 23/88, 27.06.2000.
3. Патент RU 2237610 С2, МПК 7 В66С 13/18, 15/00, 23/88, 10.10.2004.
Изобретение относится к подъемно-транспортному машиностроению и предназначено для использования в системах управления грузоподъемных кранов. Способ заключается в том, что сигналы управления исполнительными устройствами грузоподъемного крана формируются в зависимости от перемещения крановщиком рукоятки микропроцессорного аппарата управления в направлениях, соответствующих выполнению различных крановых операций, и от результата сравнения измеренных датчиками параметров работы крана с допустимыми значениями. Установка параметров формируемых сигналов управления осуществляется при помощи микропроцессорного вычислителя из условия обеспечения безопасной работы грузоподъемного крана и удобства работы крановщика в зависимости от выполняемой крановой операции, от направления и величины перемещения рукоятки аппарата управления и значений параметров работы крана. Техническим результатом изобретения является повышение эффективности защиты, безопасности работы грузоподъемного крана и удобства работы крановщика. 2 н. и 22 з.п. ф-лы, 1 ил.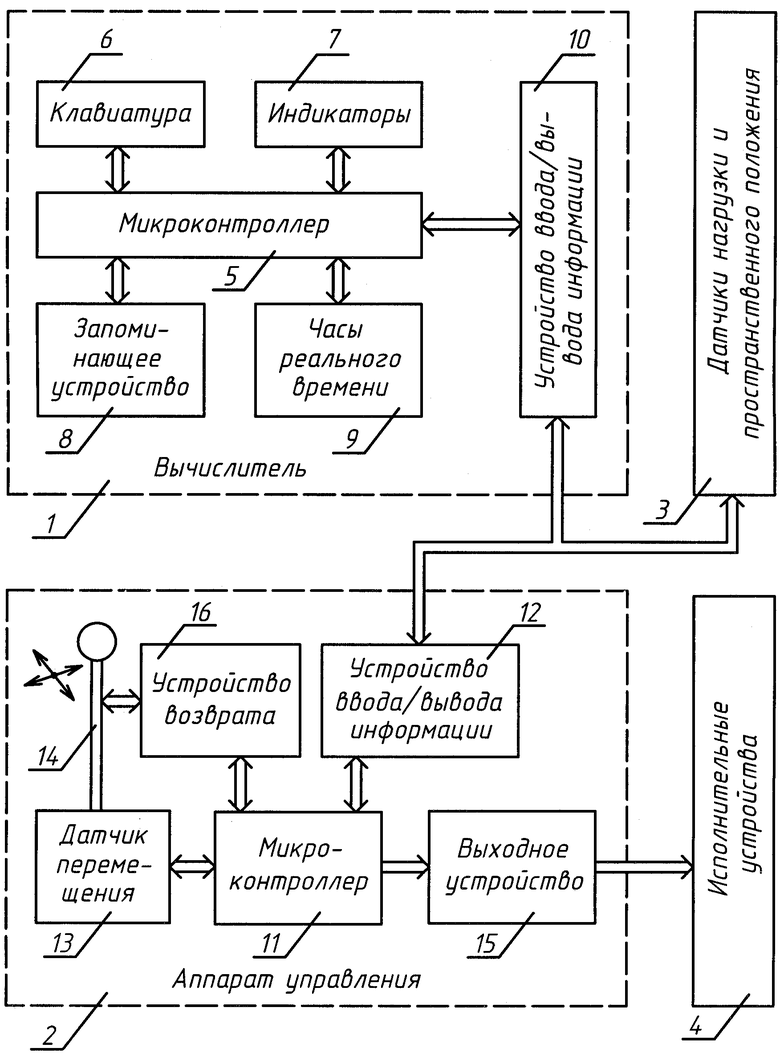
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ И ПОВРЕЖДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2237610C2 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2151732C1 |
| US 5730305 А, 24.03.1998 | |||
| СИСТЕМА УПРАВЛЕНИЯ БОЛЬШЕГРУЗНЫМ КРАНОМ | 1997 |
|
RU2129524C1 |

