Изобретение относится к системам защиты грузоподъемных кранов и других строительных машин (кранов-манипуляторов, подъемников (вышек), бетононасосов, погрузчиков и т.д.), обладающих возможностью предоставлять машинисту информацию о безопасных режимах работы машины.
Известно устройство безопасности грузоподъемного крана, содержащее цифровой вычислительный блок и подключенные к нему датчики рабочих параметров крана, запоминающий блок, исполнительный блок и блок визуальной индикации, выполненный в виде жидкокристаллического семисегментного индикатора-дисплея [1].
Его недостатком является низкая информативность отображения информации о работе грузоподъемного крана, вызванная ограниченными возможностями семисегментного индикатора-дисплея, не позволяющего отображать графическую и текстовую информацию.
Известно также устройство защиты грузоподъемного крана, содержащее датчики, размещенные на кране и предназначенные для формирования сигналов, характеризующих его нагрузку и пространственное положение стрелового оборудования, клавиатуру, выходное устройство, жидкокристаллический графический дисплей с блоком памяти графической информации и процессор, связанный с упомянутыми датчиками, клавиатурой, графическим дисплеем и с выходным устройством, соединенным с исполнительными устройствами крана. Процессор выполнен с возможностью формирования и периодического обновления графической информации об условном изображении крана в блоке памяти в зависимости от выходных сигналов датчиков, с возможностью определения по командам, поступающим с клавиатуры, и записи в блок памяти информации о рабочей зоне крана, а также воспроизведения на экране графического дисплея неподвижного изображения этой зоны одновременно с условным изображением крана в динамике [2].
В этом устройстве на графическом дисплее одновременно отображаются движения крана и разрешенная зона его работы, что обеспечивает повышение удобства работы машиниста.
Однако параметры рабочей зоны вводятся лишь машинистом, а ее изображение на экране дисплея в динамических режимах работы крана остается неподвижным. Это не позволяет учесть иные (кроме введенных машинистом) ограничения рабочей зоны, вызывает необходимость частого переключения режимов отображения информации на дисплее в процессе подъема и перемещения груза краном. Такие переключения отвлекают машиниста от контроля работы крана и, соответственно, снижают безопасность его работы.
Наиболее близким к предложенному является устройство защиты грузоподъемного крана (грузоподъемной машины) с графическим дисплеем, содержащее датчики нагрузки и пространственного положения его рабочего (стрелового) оборудования, выходное устройство, графический дисплей с блоком графической памяти и процессор, связанный с упомянутыми датчиками, графическим дисплеем и с выходным устройством, соединенным с исполнительными устройствами крана. С помощью процессора формируется условное изображение крана и рабочей зоны крана на экране графического дисплея. В первом варианте устройства процессор обеспечивает динамическое отображение на дисплее рабочей зоны крана из условия предотвращения как перегрузки крана, так и его столкновений с препятствиями. В других вариантах устройства рабочая зона на экране дисплея формируется с использованием сигналов, принятых от внешних подвижных или неподвижных объектов, с использованием сигналов локатора обзора рабочей зоны крана, с использованием предельных координат стрелового оборудования крана при его перемещениях и/или сигналов воздействия машиниста на сенсорный экран дисплея [3].
В этом устройстве формирование границ безопасной рабочей зоны машины (грузоподъемного крана) на экране графического дисплея осуществляется процессором с использованием сигналов различных датчиков без использования видеокамер.
Недостатком этого устройства является то, что неправильная настройка, или неисправность датчиков, или ошибки машиниста при вводе границ рабочей зоны приводит к формированию процессором на экране дисплея ложных границ безопасной рабочей зоны машины, что может привести к ее аварии.
Кроме того, машинист, визуально считывая с экрана дисплея положение рабочего (стрелового) оборудования машины относительно границ рабочей зоны, не видит реальный процесс ее работы в этой зоне. Например, при работе грузоподъемной машины не видит погрузочно/разгрузочную площадку, грузо-захватный орган с грузом, стропальщика (такелажника) и т.д. Поэтому при выполнении работы машинист вынужден периодически переключаться от обзора рабочей зоны машины к считыванию информации с дисплея, что в динамичных режимах работы машины приводит к снижению безопасности ее работы. По этой же причине не представляется возможным осуществить дистанционное управление машиной.
Формирование рабочей зоны машины на экране графического дисплея с использованием сигналов различных датчиков приводит к задержкам формирования границ этой зоны за счет затрат времени на обработку сигналов датчиков, что снижает эффективность реализации координатной защиты (защиты от столкновений с препятствиями) в динамичных режимах работы машины, особенно при наличии подвижных препятствий.
Техническими результатами, на достижение которых направлено изобретение, являются:
- повышение быстродействия и точности установки границ рабочей зоны машины на экране графического дисплея путем выведения на экран видеоизображения препятствий, столкновений с которыми необходимо избежать;
- повышение удобства работы машиниста и безопасности работы машины за счет одновременного отображения на экране дисплея видеоизображения рабочей зоны машины, препятствий и, при необходимости, границ рабочей зоны;
- сохранение функций координатной защиты машины при ее управлении в ручном режиме и, соответственно, безопасности работы машины, при отказах датчиков, характеризующих пространственное положение машины и ее рабочего оборудования;
- обеспечение возможности дистанционного управления машиной;
- повышение удобства работы машиниста и безопасности работы машины за счет улучшения обзорности ее рабочей зоны.
В предложенном устройстве безопасности, содержащем датчики, осуществляющие измерение нагрузки и пространственного положения рабочего оборудования машины, выходное устройство, графический дисплей с блоком памяти графической информации и процессор, связанный с упомянутыми датчиками, графическим дисплеем и с выходным устройством, причем процессор выполнен с возможностью формирования и периодического обновления в блоке памяти графической информации об условном графическом изображении машины и/или ее рабочего оборудования в зависимости от выходных сигналов датчиков, записи в блок памяти информации о рабочей зоне машины с возможностью воспроизведения этой зоны одновременно с условным изображением машины и/или ее рабочего оборудования на экране графического дисплея, указанные технические результаты достигаются за счет дополнительного оснащения этого устройства безопасности по меньшей мере одной видеокамерой, связанной с процессором, который обеспечивает формирование указанной графической информации о рабочей зоне машины на экране дисплея с использованием сигналов этой видеокамеры.
Кроме того, для достижения указанных технических результатов с использованием процессора в различных вариантах исполнения системы безопасности может быть реализовано:
- определение границ и/или положения подвижных и/или неподвижных объектов относительно машины и/или ее рабочего оборудования путем обработки сигналов видеокамер (видеоизображений), формирование с помощью выходного устройства информационных сигналов для машиниста об опасности столкновения машины и/или ее рабочего оборудования с этими объектами или сигналов управления приводами машины из условия предотвращения этого столкновения;
- определение границ и/или положения подвижных и/или неподвижных объектов путем формирования и обработки объемного видеоизображения с использованием сигналов двух видеокамер;
- отображение параметров и границ допустимой зоны работы машины на экране дисплея одновременно с видеоизображением рабочей зоны машины и условным графическим изображением машины и/или ее рабочего оборудования;
- формирование информация о границах допустимой зоны работы машины в виде линии, накладываемой на видеоизображение рабочей зоны машины на экране дисплея;
- определение параметров или границ допустимой зоны работы машины и/или ее рабочего оборудования с учетом скоростных и/или нагрузочных режимов работы машины, и/или параметров ее рабочего оборудования;
- преобразование выходных сигналов видеокамер из условия изменения угла и/или направления обзора, в частности, преобразование сигналов видеокамеры бокового обзора рабочей зоны машины в видеоизображение вида этой рабочей зоны сверху;
- оснащения устройства пультом управления, реализованным в виде набора электромеханических органов управления или контроллера сенсорного экрана, связанным с процессором и/или с видеокамерами, для ручного переключения машинистом параметров видеоизображений и/или видеокамер, и/или для ручного изменения машинистом границ рабочей зоны машины, сформированных процессором и отображаемых на экране дисплея;
- автоматическое переключение параметров видеоизображений и/или видеокамер в зависимости от выходных сигналов датчиков (от режимов работы машины), в частности, автоматическое подключение видеокамеры заднего вида к дисплею при движении машины задним ходом и/или при выявлении процессором опасности столкновения задней части машины с подвижным или неподвижным объектом;
- применение привода видеокамеры с реализацией ее автоматического наведения на место производства работ;
- формирование и отображение на экране дисплея параметров и границ допустимой зоны работы машины из условия предотвращения как столкновений машины с препятствиями, так и ее перегрузки;
- оснащение устройства проводным или беспроводным интерфейсом, в частности радиоканалом, обеспечивающим возможность формирования и отображения на экране дисплея параметров и границ допустимой зоны работы машины с использованием сигналов, принятых от устройств позиционирования, расположенных на объектах вне машины, или сигналов от стационарного поста управления машиной;
- отображение на экране графического дисплея текстовой, символьной и/или пиктографической информации, информирующей машиниста о направлениях движения машины и/или ее оборудования, и/или о наилучших с точки зрения безопасности или производительности операциях по управлению машиной, и/или о необходимости проведения технического обслуживания машины, и/или возникших неисправностях машины, отображение этой информации, в частности, вблизи схематичного изображения соответствующей части условного графического изображении машины и/или ее рабочего оборудования на экране дисплея, использование для этого фрагментов текста руководства по эксплуатации машины и/или задания машинисту на выполнение определенных видов работ;
- запись параметров работы машины, в том числе параметров зоны ее работы, и видеоинформации в дополнительный блок памяти регистратора параметров, подключенный к процессору или входящий в его состав, и выполненный с возможностью считывания с него информации в мобильное или стационарное устройство в случае необходимости.
Благодаря указанным отличительным признакам в предложенном устройстве осуществляется отображение на экране графического дисплея условного графического изображения машины и ее рабочего (стрелового) оборудования одновременно с видеоизображением рабочей зоны машины и находящихся в ней препятствий. На видеоизображение может накладываться линия, определяющая границу рабочей зоны, а также осуществляться автоматическое или ручное переключение видеоизображений и их параметров, а также автоматическая наводка видеокамер на место производства работ.
Эти и другие указанные выше отличительные признаки устройства не известны из уровня техники. Они обеспечивают повышение быстродействия и точности установки границ рабочей зоны машины на экране дисплея, повышение безопасности работы машины и удобства работы машиниста, позволяют сохранить функции координатной защиты при отказах датчиков при ручном управлении машиной, реализовать ее дистанционное управление и, соответственно, находятся в прямой причинно-следственной связи с достижением этих технических результатов.
На чертеже в качестве примера приведена функциональная схема устройства безопасности машины с графическим дисплеем.
Устройство безопасности содержит процессор 1, реализованный на основе микроконтроллера с интегрированной памятью данных и программ и подключенных к нему интерфейсных устройств, обеспечивающих согласование входов/выходов микроконтроллера с внешними линиями связи.
К процессору подключены датчики рабочих параметров машины 2, размещенные на ней и предназначенные для формирования сигналов, характеризующих нагрузку и/или пространственное положение ее рабочего оборудования, например стрелы и/или грузозахватного органа. К ним относятся, в частности, тензометрический датчик силы, установленный в канате стрелового или в грузового полиспаста, тензометрические датчики давления, установленные в гидроцилиндре подъема стрелы, датчик угла наклона стрелы (микромеханический акселерометр/инклинометр), датчик угла азимута, датчик длины стрелы, концевые выключатели предельного подъема грузозахватного органа, положений органов управления гидравлической системы машины, положений опор и противовеса, датчик приближения к линии электропередачи и т.д. Конкретный состав датчиков 2 определяется в зависимости от установленных требований к устройству безопасности и конструктивных особенностей строительной машины.
Датчики 2 могут иметь как аналоговые, например токовые, так и цифровые выходы (в любой комбинации). В первом случае подключение датчиков 2 к процессору 1 осуществляется по отдельным проводам, а процессор 1 (его микроконтроллер или какая-либо интерфейсная схема) содержит АЦП, в общем случае многоканальный. Если датчики 2 выполнены с цифровыми выходами - с мультиплексным каналом обмена данными, то каждый датчик 2 содержит последовательно соединенный первичный преобразователь, АЦП, микроконтроллер (или микроконтроллер со встроенным АЦП) и контроллер, трансивер или драйвер мультиплексного канала обмена данными последовательного интерфейса LIN (Local Interconnect Network), Л 850 (SAE), CAN (Controller Area Network), RS-485 и т.п. Аналогичный контроллер, трансивер или драйвер мультиплексного канала имеет и процессор 1. В этом случае датчики 2 подключаются параллельно к мультиплексному каналу обмена данными. К этому же каналу может быть подключено и выходное устройство 3. Возможна также беспроводная передача данных от датчиков 2 в процессор 1 по радиоканалу какого-либо типа.
К процессору 1 дополнительно подключены органы управления 5, выполненные, например, в виде кнопок или переключателей, и графический матричный дисплей 6, преимущественно жидкокристаллический, например, цветной TFT, с блоком памяти графической информации 7, отображаемой на дисплее.
Дисплей 6 может иметь сенсорный экран, выходы которого непосредственно или через дополнительный контроллер сенсорного экрана соединены с входами процессора 1.
Устройство безопасности может дополнительно содержать видеокамеру или несколько видеокамер 8, соединенных с процессором 1 и оснащенных, в случае необходимости, приводами 9, например, электромеханическими со встроенными регуляторами следящего действия и датчиками углового положения. Управление приводом (приводами) 9 может осуществляться от процессора 1 через выходное устройство 3, например, путем передачи на привод 9 сигналов, задающих пространственное положение видеокамеры.
Дополнительно устройство безопасности может содержать соединенные с процессором 1 устройство приема/передачи данных от какого-либо внешнего объекта (например, приемопередатчик радиоканала связи), устройство определения местоположения машины или ее рабочего оборудования (например, приемник системы GPS), дополнительный блок памяти регистратора параметров, часы реального времени, дополнительные устройства звуковой и световой сигнализации и т.п. (на чертеже условно не показаны).
Выходное устройство 3 выполнено в виде набора силовых электронных усилителей (в частности, ШИМ), ключей или электромагнитных реле с соответствующими драйверами. Это устройство может быть также выполнено на основе микроконтроллера и подключенных к нему усилителей, электронных ключей или электромагнитных реле. В зависимости от варианта исполнения выходное устройство 3 своими входами или двунаправленными входами/выходами подключено к процессору 1, соответственно, при помощи отдельных линий связи или мультиплексного канала обмена данными.
Выходы исполнительного устройства 3 подключены к одному или к нескольким исполнительным устройствам 4 машины, выполненным, например, в виде электрогидравлических клапанов или контакторов (пускателей), реализующих функции блокирования опасных перемещений машины в целом и ее рабочего оборудования.
Процессор 1, выходное устройство 3, органы управления 5, дисплей 6 с блоком памяти графической информации 7 и другие функциональные блоки (при их наличии) могут быть выполнены в виде единого электронного блока - блока индикации, блока обработки данных, центрального контролера системы безопасности и т.п. Возможна также многоблочная реализация устройства безопасности, при которой, кроме датчиков 2, присутствует два и более электронных блока. Например, выходное устройство 3 может быть вынесено в отдельный блок (выходной блок, блок расширения, исполнительный контроллер системы безопасности и т.п.). При этом часть датчиков, например концевые выключатели, могут быть подключены к этому отдельному блоку.
Устройство безопасности работает следующим образом.
Перед началом работы машины устройство безопасности автоматически (при включении напряжения питания) или при помощи органов управления 5 переводится в режим настройки. В этом режиме машинистом при помощи органов управления 5 задаются и вводятся в микроконтроллер процессора 1 данные о режиме и параметрах работы машины и, соответственно, устройства безопасности - тип использующегося рабочего (стрелового) оборудования (наличие и угол наклона гуська, кратность запасовки грузового полиспаста и т.п.), положение опор и т.д., если это необходимо для данной конструкции машины. После ввода этих данных микроконтроллер процессора 1 формирует условные графические изображения элементов конструкции машины, включая ее рабочее оборудование, и записывает их блок памяти 7. Далее эти изображения отображаются на дисплее 6, позволяя машинисту контролировать правильность ввода данных (параметров).
Одновременно с помощью видеокамеры 8 формируется видеоизображение рабочей зоны машины, передается на процессор 1 и далее отображается на дисплее 6. Таким образом, на экран дисплея одновременно выводятся видеоизображение рабочей зоны крана и, поверх него, условное графическое изображение машины и/или ее рабочего оборудования. Их взаимная привязка осуществляется с помощью датчиков пространственного положения 2.
Если видеокамера 8 расположена, например, на оголовке (на вершине) стрелы машины и ориентирована вниз, то видеокамера не фиксирует эту стрелу. Ее реальное изображение на экране дисплея замещается ее условным графическим изображением.
Машинист тем самым получает возможность наблюдать на экране дисплея реальную обстановку на месте производства работ, в том числе оценивать положение рабочего оборудования машины относительно различных препятствий (объектов), расположенных в зоне работы машины и попадающих в поле зрения видеокамеры.
При необходимости машинист дополнительно при помощи органов управления 5 вводит в микроконтроллер процессора 1 параметры координатной защиты машины - ограничения зоны работы крана. Этими ограничениями могут быть, в частности, ограничения максимального значения вылета грузо-захватного органа, высоты подъема стрелы или платформы, предельные углы поворота машины влево и/или вправо и т.д. Полученные данные также сохраняются в памяти микроконтроллера процессора 1 или в дополнительном блоке энергонезависимой памяти. Далее микроконтроллером процессора 1 по заранее установленному алгоритму на основании введенных параметров формируется зона работы машины в виде пространства допустимых положений рабочего оборудования машины и записывается в блок памяти графической информации 7. Сформированная рабочая зона в виде линии отображается на графическом дисплее 6.
Ввод параметров координатной защиты может также осуществляться путем воздействия машиниста на дисплей, на который выведено видеоизображение рабочей зоны машины с находящимися на ней объектами (препятствиями). В этом случае дисплей 6 снабжается сенсорным экраном, который передает в микроконтроллер процессора 1 координаты тех точек сенсорного экрана (дисплея), на которые воздействует машинист. Эти координаты в установленном масштабе соответствуют координатам рабочей зоны машины.
Границы допустимой зоны работы машины могут определяться также процессором 1 путем анализа видеоизображений, получаемой от одной или двух видеокамер 8 (от стереопары). В этом случае процессор 1 определяет границы (контуры) подвижных и неподвижных объектов, находящихся в поле зрения видеокамер, получает информацию о границах допустимой зоны работы и выводит ее на дисплей в виде линии, накладываемой на видеоизображение рабочей зоны.
При использовании любого способа ввода параметров координатной защиты эти параметры могут быть дополнительно скорректированы машинистом по командам с органов управления 5 или путем воздействия на сенсорный экран дисплея 6.
Эта зона работы формируется, в общем случае, из условия обеспечения защиты машины от перегрузки. Например, если в какой-либо области рабочей зоны возможна перегрузка машины по грузовому моменту, то работа в этой области запрещена несмотря на отсутствие в ней каких-либо объектов (препятствий).
При работе машины процессор 1, работая по программе, предварительно записанной в памяти его микроконтроллера или в дополнительном блоке энергонезависимой памяти, по отдельным линиям связи или по мультиплексному каналу обмена данными получает от датчиков 2 текущие значения рабочих параметров машины. На основании этих данных, в соответствии с заранее записанным его памяти порядком (алгоритмом) обработки этих параметров, микроконтроллер процессора 1 вычисляет текущую нагрузку машины и положение ее рабочего оборудования. Вычисления производятся, например, с использованием математической модели машины.
Допустимые режимы нагружения в виде грузовых характеристик машины хранятся в памяти микроконтроллера процессора 1 или в дополнительном блоке энергонезависимой памяти.
Микроконтроллер процессора 1 осуществляет сравнение фактического нагружения машины с предельно-допустимым, а также сравнение фактического положения рабочего (стрелового, грузоподъемного) оборудования с зоной его допустимых положений. Далее, в зависимости от результатов этих сравнений, от процессора 1 по отдельным проводам или по мультиплексному каналу обмена данными на выходное устройство 3 и, соответственно, на исполнительные устройства 4 передаются сигналы, блокирующие опасные движения машины и ее рабочего оборудования. Благодаря этому обеспечивается защита крана от перегрузки и защита от столкновения рабочего оборудования с препятствиями (координатная защита).
Если устройство безопасности выполнено в виде индикатора, то машинист при ручном управлении машиной оценивает возможность и допустимость тех или иных перемещений ее рабочего оборудования, ориентируясь на информацию, отображаемую на дисплее 6.
Дополнительно на дисплее 6 могут отображаться основные параметры работы машины, например, степень ее загрузки по грузовому моменту (Мз, %), текущее значение массы поднимаемого груза (Q, т), максимально допустимое значение массы поднимаемого при текущем значении вылета (Qмах, т), вылет (R, м), высота подъема стрелы или грузозахватного органа (H, м), максимально-допустимая высота с учетом введенного ограничения (Hмах, м), длина стрелы (L, м), угол наклона стрелы (α, град) и угол азимута (γ, град), а также предупреждающие сообщения для машиниста и режимы работы дисплея 6 или устройства безопасности в целом и т.д.).
Кроме того, процессор 1 с использованием сигналов датчиков 2 и информации, предварительно записанной в его блок памяти, может передавать на дисплей 6 текстовую, символьную и/или пиктографическую информацию, информирующую машиниста о текущих и допустимых направлениях движения машины и ее оборудования, о наилучших с точки зрения безопасности или производительности операциях по управлению машиной, о необходимости проведения технического обслуживания машины, и/или о возникших неисправностях. Эта информация может отображаться вблизи схематичного изображения на экране дисплея соответствующей части условного графического изображении машины и ее рабочего оборудования. В качестве этой информации могут использоваться, в частности, фрагменты текста руководства по эксплуатации машины или задания машинисту на выполнение определенных видов работ.
Благодаря этому машинист, наблюдая информацию, отображаемую на дисплее 6, имеет возможность оценивать безопасность работы и заблаговременно выявлять приближение машины к опасным режимам работы как с точки зрения перегрузки, так и столкновений машины с препятствиями. При этом, в случае необходимости, может осуществляться ручное или автоматическое переключение режимов работы дисплея, видеокамер, и параметров видеоизображения. Процессор 1 может осуществлять преобразование выходных сигналов видеокамер из условия изменения угла и/или направления обзора. В частности, преобразование сигналов видеокамеры бокового обзора рабочей зоны машины в видеоизображение вида этой рабочей зоны сверху.
С использованием сигналов датчиков 2 процессор 1 может осуществлять также автоматическое переключение параметров видеоизображений или видеокамер в зависимости от режимов работы машины. В частности, автоматическое подключение видеокамеры заднего вида к дисплею при движении машины задним ходом и/или при выявлении процессором опасности столкновения задней части машины с подвижным или неподвижным объектом, автоматическое наведение видеокамеры на место производства работ с помощью привода 9 и т.д. Это обеспечивает повышение удобства работы машиниста и безопасности работы машины.
Граница рабочей зоны машины по максимальному значению его нагрузки (грузового момента) в общем случае не остается постоянной, а изменяется в процессе работы машины. Например, изменение длины (телескопирование) стрелы машины приводит к изменению положения центра ее тяжести и, соответственно, к изменению максимальной грузоподъемности машины Qмах при одном и том же значении вылета. В этом случае микроконтроллер процессора 1, после получения данных от датчика длины стрелы 2, осуществляет формирование нового графического изображения рабочей зоны машины. Соответствующая графическая информация записывается в блок памяти 7 и далее вместе с условным изображением машины и видеоизображением ее рабочей зоны отображается на экране дисплея 6. То же самое происходит при изменении других параметров машины, влияющих на максимально-допустимое значение ее грузового момента - при изменении положения противовеса, угла наклона гуська, положения опор и т.п.
В итоге, в динамических режимах работы машины осуществляется изменение не только схематичного изображения машины, включая положение и длину его рабочего оборудования, но и изображения рабочей зоны крана. Это повышает информативность отображения информации на дисплее.
При наличии технической возможности аналогичным образом может осуществляться объемное отображение схематичного изображения машины, ее рабочей зоны и границ предельно-допустимых положений рабочего оборудования.
Автоматическая установка или автоматическая коррекция (уменьшение) разрешенной рабочей зоны машины, отображаемой на дисплее 6, при наличии вблизи машины каких-либо объектов, столкновение с которым недопустимо, может осуществляться не только путем обработки видеосигналов от камер 8, но и после приема сигналов от устройств позиционирования, расположенных вне машины на подвижных или неподвижных объектах, или от стационарного поста управления машиной.
В этом случае устройство безопасности дополнительно оснащается проводным или беспроводным интерфейсом, в частности радиоканалом, связанным с процессором 1 (на чертеже условно не показан). При этом микроконтроллер процессора 1, после анализа окружающего машину пространства путем анализа видеосигналов, на основании принятых сигналов дополнительно корректирует границы разрешенной зоны работы машины с последующим выводом линии этих границ на экран дисплея 6.
Устройство безопасности в любом варианте его исполнения дополнительно содержит блок памяти регистратора параметров, подключенный к процессору 1 или входящий в его состав, приспособленный для регистрации параметров работы машины в реальном времени, включая видеорегистрацию. Считывание памяти регистратора осуществляется в случае необходимости с использованием мобильного носителя информации или стационарного устройства.
При практической реализации устройства могут быть использованы различные технические средства и различные формы отображения информации на дисплеях, что не имеет принципиального значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| СИСТЕМА БЕЗОПАСНОСТИ СТРОИТЕЛЬНЫХ МАШИН (ВАРИАНТЫ) | 2010 |
|
RU2452683C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНЫХ КРАНОВ ОТ СТОЛКНОВЕНИЙ | 2009 |
|
RU2398728C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2343103C2 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2568695C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2345944C1 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ (ВАРИАНТЫ) | 2009 |
|
RU2399576C1 |
| СИСТЕМА РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2307059C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2007 |
|
RU2347736C2 |
Изобретение относится к системам защиты грузоподъемных кранов и других строительных машин. Устройство безопасности содержит датчики параметров рабочего оборудования, выходное устройство, дисплей с блоком памяти и процессор, связанный с датчиками, дисплеем и выходным устройством. Процессор формирует и обновляет в блоке памяти графическую информацию об изображении машины или ее оборудования, в зависимости от сигналов датчиков. Также устройство имеет, по меньшей мере, одну видеокамеру, связанную с процессором, который обрабатывает сигналы с видеокамеры, а также формирует и записывает в блок памяти информацию о рабочей зоне машины, положение ее рабочего оборудования и границы допустимой рабочей зоны машины, с возможностью отображения этой информации на дисплее одновременно с видеоизображением рабочей зоны. Решение направлено на повышение надежности работы грузоподъемного крана. 15 з.п. ф-лы, 1 ил.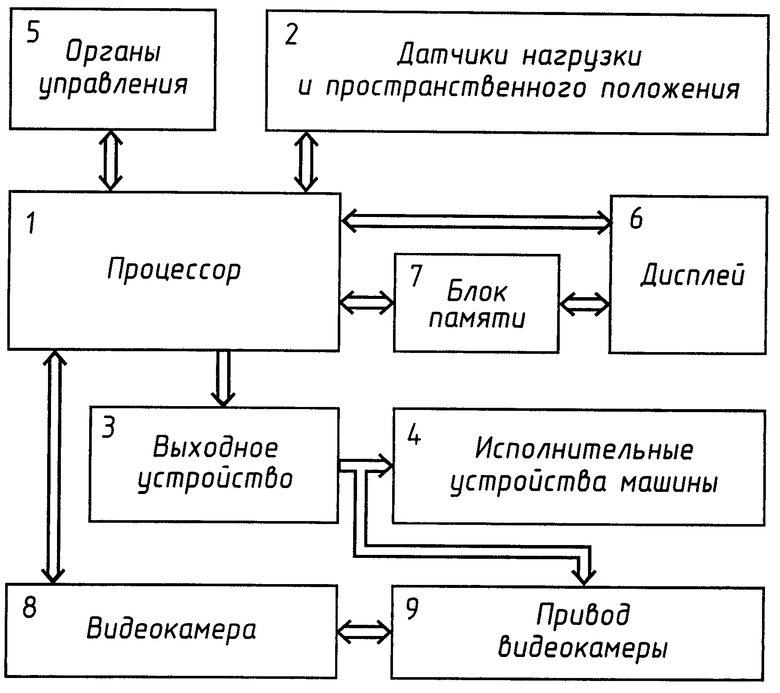
1. Устройство безопасности машины с графическим дисплеем, содержащее датчики, приспособленные для формирования сигналов, характеризующих ее нагрузку и/или пространственное положение рабочего оборудования, выходное устройство, графический дисплей с блоком памяти графической информации и процессор, связанный с упомянутыми датчиками, графическим дисплеем и выходным устройством, причем процессор выполнен с возможностью формирования и периодического обновления в блоке памяти графической информации об условном графическом изображении машины и/или ее рабочего оборудования в зависимости от выходных сигналов датчиков, записи в блок памяти информации о рабочей зоне машины с возможностью воспроизведения этой зоны одновременно с условным изображением машины и/или ее рабочего оборудования на экране графического дисплея, отличающееся тем, что оно дополнительно содержит, по меньшей мере, одну видеокамеру, связанную с процессором, который выполнен с возможностью обработки сигнала видеокамеры, а также формирования и записи в блок памяти графической информации о рабочей зоне машины в виде границ и/или положения подвижных и/или неподвижных объектов относительно машины и/или ее рабочего оборудования, или графической информации о параметрах и/или границах допустимой зоны работы машины, с возможностью отображения этой информации на экране дисплея одновременно с видеоизображением рабочей зоны машины.
2. Устройство по п.1, отличающееся тем, что процессор выполнен с возможностью формирования информации о параметрах и/или границах допустимой зоны работы из условия отсутствия столкновения машины и/или ее рабочего оборудования с указанными объектами или перегрузки машины в этой зоне, а выходное устройство и процессор приспособлены для формирования информационных сигналов для машиниста или сигналов управления приводами машины из условия предотвращения этого столкновения или этой перегрузки.
3. Устройство по п.1, отличающееся тем, что оно содержит две видеокамеры, приспособленные для обзора рабочей зоны машины, а процессор выполнен с возможностью определения границ и/или положения подвижных и/или неподвижных объектов путем формирования и обработки объемного видеоизображения с использованием сигналов двух видеокамер.
4. Устройство по любому из пп.1-3, отличающееся тем, что информация о границах допустимой зоны работы формируется в виде, по меньшей мере, одной линии, накладываемой на видеоизображение рабочей зоны машины на экране дисплея.
5. Устройство по любому из пп.1-3, отличающееся тем, что процессор выполнен с возможностью определения параметров или границ допустимой зоны работы машины и/или ее рабочего оборудования с учетом скоростных и/или нагрузочных режимов работы машины, и/или параметров ее рабочего оборудования.
6. Устройство по любому из пп.1-3, отличающееся тем, что процессор выполнен с возможностью преобразования выходных сигналов по меньшей мере одной видеокамеры, при котором осуществляется изменение угла и/или направления обзора при формировании видеоизображения рабочей зоны машины или ее части на экране дисплея.
7. Устройство по п.6, отличающееся тем, что процессор выполнен с возможностью преобразования сигналов видеокамеры бокового обзора рабочей зоны машины в видеоизображение вида этой рабочей зоны сверху.
8. Устройство по любому из пп.1-3 или 7, отличающееся тем что оно дополнительно оснащено пультом управления, реализованным в виде набора электромеханических органов управления или сенсорного экрана с контроллером, связанным с процессором и/или с видеокамерами и выполненным с возможностью ручного переключения машинистом параметров видеоизображений и/или видеоизображений от различных видеокамер, и/или с возможностью ручного изменения машинистом границ рабочей зоны машины, сформированных процессором и отображаемых на экране графического дисплея.
9. Устройство по любому из пп.1-3 или 7, отличающееся тем что процессор выполнен с возможностью автоматического переключения параметров видеоизображений и/или видеоизображений от различных видеокамер в зависимости от выходных сигналов датчиков и/или от режимов работы машины, выявляемых процессором.
10. Устройство по п.9, отличающееся тем, что процессор выполнен с возможностью автоматической передачи в блок памяти и отображения на экране дисплея информации с видеокамеры заднего вида при движении машины задним ходом и/или при выявлении процессором опасности столкновения задней части машины с подвижным или неподвижным объектом.
11. Устройство по любому из пп.1-3, 7 или 10, отличающееся тем, что оно дополнительно содержит, по меньшей мере, один привод, по меньшей мере, одной видеокамеры, связанный с процессором или с выходным устройством, причем процессор выполнен с возможностью обработки выходных сигналов датчиков и формирования сигналов управления приводом видеокамеры из условия ее автоматического наведения на место производства работ.
12. Устройство по любому из пп.1-3, 7 или 10, отличающееся тем, что процессор дополнительно выполнен с возможностью формирования и записи в блок памяти графической информации о параметрах и границах допустимой зоны работы машины с использованием сигналов, принятых, по меньшей мере, от одного устройства позиционирования, расположенного вне машины на по меньшей мере одном подвижном или неподвижном объекте, или сигналов от стационарного поста управления машиной, при этом устройство оснащено проводным или беспроводным интерфейсом, в частности радиоканалом, связанным с процессором и приспособленным для передачи и приема этих сигналов.
13. Устройство по любому из пп.1-3, 7 или 10, отличающееся тем, что процессор оснащен входящим в его состав или дополнительным блоком памяти и дополнительно выполнен с возможностью формирования с использованием сигналов датчиков и информации, предварительно записанной в этот блок памяти, а также с возможностью записи в блок памяти графической информации и отображения на экране графического дисплея текстовой, и/или символьной, и/или пиктографической информации, информирующей машиниста о текущих и/или допустимых направлениях движения машины и/или ее оборудования, и/или о наилучших с точки зрения безопасности или производительности операциях по управлению машиной, и/или о необходимости проведения технического обслуживания машины, и/или о возникших неисправностях машины.
14. Устройство по п.13, отличающееся тем, что процессор выполнен с возможностью формирования сигналов об отображении указанной информации на экране графического дисплея вблизи схематичного изображения на этом экране соответствующей части условного графического изображения машины и/или ее рабочего оборудования.
15. Устройство по п.13, отличающееся тем, что процессор выполнен с возможностью формирования сигналов об отображении указанной текстовой информации и при необходимости символьной и/или пиктографической информации в виде фрагментов текста руководства по эксплуатации машины и/или задания машинисту на выполнение определенных видов работ.
16. Устройство по любому из пп.1-3, 7, 10, 14 или 15, отличающееся тем, что оно дополнительно содержит блок памяти регистратора параметров, подключенный к процессору или входящий в его состав и выполненный с возможностью считывания с него информации в мобильное или стационарное устройство в случае необходимости, а процессор выполнен с возможностью записи в этот блок памяти параметров работы машины, в том числе параметров зоны ее работы, и видеоинформации.
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2343103C2 |
| СИСТЕМА РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2307059C2 |
| КРАНОВОЕ ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 1989 |
|
RU2093452C1 |
| JP 6239582 A, 30.08.1994 | |||
| WO 2009043789 A1, 09.04.2009 | |||
| Резиновая смесь для изготовленияпОдРЕльСОВыХ пРОКлАдОК | 1978 |
|
SU806703A1 |

