Изобретение относится к машиностроению и может быть использовано в системах автоматизированной защиты грузоподъемных кранов и в системах контроля технического состояния их гидравлических систем.
Известен способ защиты грузоподъемного крана от перегрузки и повреждения путем установки зоны допустимых (пороговых) уровней для выбранных рабочих параметров грузоподъемного крана, характеризующих грузовой момент и положение грузоподъемного (стрелового) оборудования крана, контроля в процессе работы грузоподъемного крана значений выбранных параметров, сравнения этих значений с пороговыми уровнями и формирования предупреждающих сигналов и сигналов управления исполнительными устройствами грузоподъемного крана в зависимости от результатов этого сравнения [1, 2].
Система защиты грузоподъемного крана, реализующая этот способ, содержит микропроцессорный вычислитель и подключенные к нему датчики параметров работы грузоподъемного крана и исполнительное устройство. Вычислитель оснащен энергонезависимой памятью, в которую записаны величины нагрузок, допустимых для различных пространственных положений стрелы крана, и выполнен с возможностью измерения текущей нагрузки и текущего пространственного положения стрелы с помощью указанных датчиков, а также с возможностью сравнения текущего и допустимого значений нагрузки и блокирования работы крана, если текущая нагрузка крана превышает допустимую [1, 2].
В этом техническом решении обеспечивается защита грузоподъемного крана как от перегрузки, так от столкновений стрелы с препятствиями при работе крана в стесненных условиях. Однако при этом не учитываются наработка и техническое состояние грузоподъемного крана, что существенно снижает эффективность его защиты.
Более совершенным и наиболее близким к предложенному является способ защиты грузоподъемного крана от перегрузки путем предварительного определения и запоминания величин нагрузок, допустимых для различных пространственных положений стрелы или грузозахватного органа крана, а также предельного значения диагностического параметра, характеризующего техническое состояние крана, включая его гидросистему, измерения в процессе работы крана параметров, характеризующих его текущую нагрузку, текущее пространственное положение стрелы или грузозахватного органа и текущее значение диагностического параметра, сравнения текущей нагрузки крана с запомненной допустимой нагрузкой для текущего пространственного положения его стрелы или грузозахватного органа и блокирования работы крана, если текущая нагрузка превышает допустимую, а также сравнения текущего и предельного значений диагностического параметра и формирования предупреждающего сигнала, изменения допустимой величины нагрузки или блокирования работы крана в зависимости от результатов этого сравнения [3].
Система защиты грузоподъемного крана, реализующая этот способ, содержит цифровой вычислитель, реализованный на основе микроконтроллера, датчики параметров работы грузоподъемного крана и исполнительное устройство, подключенные к цифровому вычислителю посредством отдельных проводов и/или мультиплексного канала обмена данными. Цифровой вычислитель содержит энергонезависимую память, в которой записаны величины нагрузок, допустимых для различных пространственных положений стрелы или грузозахватного органа крана, и предельное значение диагностического параметра, характеризующего техническое состояние крана, и выполнен с возможностью измерения посредством указанных датчиков текущей нагрузки, текущего пространственного положения стрелы или грузозахватного органа крана и текущего значения диагностического параметра, а также с возможностью формирования предупреждающего сигнала, уменьшения допустимого значения нагрузки или блокирования работы крана, если текущая нагрузка крана и/или текущее значение диагностического параметра превышает соответствующую допустимую или предельную величину [3].
В этом техническом решении обеспечивается повышение эффективности защиты грузоподъемного крана от перегрузок путем учета его технического состояния непосредственно в процессе выполнения грузоподъемных операций, повышение срока службы крана путем снижения нагрузок на кран при ухудшении его технического состояния, а также повышение оперативности контроля этого технического состояния.
Однако при этом, ввиду отсутствия соответствующих датчиков, осуществляется контроль технического состояния преимущественно металлоконструкций крана, но не его гидравлической системы. Техническое состояние гидросистемы оценивается лишь в статическом режиме - по скорости изменения давления под нагрузкой или по изменению положения стрелы или груза при отсутствии управляющих воздействий. Кроме того, не учитывается энергоемкость выполнения грузоподъемных операций и не учитывается причинно-следственная связь между этой энергоемкостью и техническим состоянием гидросистемы крана.
Техническими результатами, на получение которых направлено предложенное техническое решение, являются:
- обеспечение полноты, достоверности и оперативности диагностирования гидросистемы за счет осуществления ее контроля при работе крана в динамических режимах под нагрузкой;
- снижение затрат энергии на выполнение грузоподъемных операций путем предотвращения работы крана при низком КПД гидравлического привода;
- повышение эффективности защиты грузоподъемного крана от перегрузки путем снижения максимально допустимой нагрузки на кран при ухудшении технического состояния его гидросистемы.
В предложенном способе защиты грузоподъемного крана от перегрузки с диагностированием его гидросистемы путем предварительного определения величин нагрузок, допустимых для различных пространственных положений стрелы или грузозахватного органа крана, и предельного значения по меньшей мере одного диагностического параметра, характеризующего техническое состояние его гидросистемы, их запоминания, измерения в процессе работы крана параметров, характеризующих его текущую нагрузку и текущее пространственное положение стрелы или грузозахватного органа, сравнения текущей нагрузки крана с запомненной допустимой нагрузкой для текущего пространственного положения его стрелы или грузозахватного органа и блокирования работы крана, если текущая нагрузка превышает допустимую, а также определения в процессе работы крана текущего значения диагностического параметра для текущего значения нагрузки крана, сравнения текущего и предельного значений диагностического параметра и формирования предупреждающего сигнала, или изменения допустимой величины нагрузки, или блокирования работы крана, в зависимости от результатов этого сравнения, решение поставленных технических задач достигается тем, что в процессе работы крана дополнительно определяют скорость вращения вала насоса или силового агрегата крана и скорость движения стрелы или грузозахватного органа и/или поворотной платформы крана, после чего указанное определение текущего значения диагностического параметра осуществляют с учетом этих скоростей.
Решение поставленных технических задач может достигаться также за счет того, что дополнительно измеряют давление по меньшей мере в одной точке гидравлической системы крана, и/или крутящий момент на валу насоса, и/или расход рабочей жидкости по меньшей мере в одной гидролинии, и/или температуру рабочей жидкости по меньшей мере в одной точке гидравлической системы крана, после чего определение текущего значения указанного диагностического параметра осуществляют с использованием результатов этих измерений.
Предельные значения диагностического параметра могут быть различными для различных направлений движения стрелы, или грузозахватного органа, или поворотной платформы крана. В процессе работы крана дополнительно определяют это направление, осуществляют выбор соответствующего ему предельного значения диагностического параметра, после чего и осуществляют указанное сравнение текущего и предельного значений диагностического параметра. Определение текущего значения диагностического параметра может осуществляться при помощи цифрового вычислителя с использованием зависимостей, предварительно определенных и сохраненных в памяти цифрового вычислителя в виде формулы или таблицы, или с использованием математической модели грузоподъемного крана и/или его гидросистемы. В качестве диагностического параметра может использоваться коэффициент полезного действия (КПД) гидропривода, температура рабочей жидкости в гидросистеме крана, скорость движения его стрелы, грузозахватного органа или поворотной платформы и другие показатели (параметры).
В общем случае, предельное значение какого-либо диагностического параметра определяют и запоминают в виде функции нагрузки, и/или пространственного положения стрелы или грузозахватного органа крана, и/или скорости вращения вала насоса или силового агрегата крана.
В устройстве для осуществления предложенного способа - в системе защиты грузоподъемного крана, содержащей цифровой вычислитель, реализованный на основе микроконтроллера, датчики параметров работы грузоподъемного крана и исполнительное устройство, подключенные к цифровому вычислителю посредством отдельных проводов и/или мультиплексного канала обмена данными, причем цифровой вычислитель выполнен с возможностью запоминания величин нагрузок, допустимых для различных пространственных положений стрелы или грузозахватного органа крана, и предельного значения по меньшей мере одного диагностического параметра, характеризующего техническое состояние его гидросистемы, с возможностью измерения посредством указанных датчиков текущей нагрузки, текущего пространственного положения стрелы или грузозахватного органа крана и определения текущего значения диагностического параметра, а также с возможностью формирования предупреждающего сигнала, уменьшения допустимого значения нагрузки или сигнала блокирования работы крана, если текущая нагрузка крана и/или текущее значение диагностического параметра превышает соответствующую допустимую или предельную величину, решение поставленных технических задач достигается за счет того, что эта система дополнительно содержит датчик скорости вращения вала насоса или силового агрегата крана, подключенный к цифровому вычислителю, который выполнен с возможностью определения скорости движения стрелы или грузозахватного органа и/или поворотной платформы крана и с возможностью определения текущего значения диагностического параметра с учетом значений этих скоростей.
Для получения указанных технических результатов система защиты может дополнительно содержать по меньшей мере один датчик давления в гидравлической системе крана, и/или датчик крутящего момента на валу насоса, и/или по меньшей мере один датчик расхода рабочей жидкости в гидролинии, и/или по меньшей мере один датчик температуры рабочей жидкости в гидравлической системе крана, подключенный к цифровому вычислителю, который, соответственно, выполнен с возможностью определения текущего значения диагностического параметра с использованием выходных сигналов этих датчиков.
Кроме того, цифровой вычислитель может быть выполнен с возможностью запоминания различных предельных значений диагностического параметра для различных направлений движения стрелы, или грузозахватного органа, или поворотной платформы крана, а также с возможностью определения этого направления в процессе работы крана и выбора соответствующего предельного значения диагностического параметра. В частности, цифровой вычислитель выполнен с возможностью вычисления КПД гидропривода и использования этого коэффициента в качестве диагностического параметра.
Предельные значения диагностического параметра в цифровом вычислителе в общем случае запоминаются в виде функции нагрузки, пространственного положения стрелы или грузозахватного органа крана и/или скорости вращения вала насоса или силового агрегата крана.
Для документирования работы системы текущие значения параметров работы крана и диагностических параметров могут дополнительно сохраняться в энергонезависимом запоминающем устройстве с возможностью считывания в случае необходимости.
Отличительные признаки независимых пунктов формулы заявленного изобретения предусматривают:
- определение диагностического параметра гидропривода с учетом скорости вращения вала насоса или силового агрегата крана, скорости движения стрелы, грузозахватного органа и поворотной платформы крана, давления в гидравлической системе крана, крутящего момента на валу насоса, расхода и/или температуры рабочей жидкости;
- определение и запоминание различных предельных значений диагностического параметра для различных направлений движения стрелы, грузозахватного органа или поворотной платформы крана;
- определение текущего значения диагностического параметра при помощи цифрового вычислителя с использованием предварительно запомненных функциональных зависимостей или математической модели грузоподъемного крана и/или его гидросистемы;
- использование в качестве диагностического параметра величины КПД гидропривода, температуры рабочей жидкости или скорости движения стрелы, грузозахватного органа или поворотной платформы крана под нагрузкой;
- определение и запоминание диагностического параметра в виде функции нагрузки, пространственного положения стрелы или грузозахватного органа крана, скорости вращения вала насоса или силового агрегата крана;
- сохранение значений диагностического параметра в энергонезависимой памяти.
Эти признаки находятся в прямой причинно-следственной связи с указанными техническими результатами, поскольку их реализация обеспечивает полную, достоверную и оперативную диагностику гидросистемы непосредственно в процессе работы крана, в том числе в динамических режимах под нагрузкой, снижение затрат энергии на выполнение грузоподъемных операций путем своевременного выявления снижения КПД гидропривода и реализации соответствующих профилактических мероприятий, а также повышение эффективности защиты грузоподъемного крана от перегрузки путем снижения максимально допустимой нагрузки на кран при ухудшении технического состояния его гидросистемы.
Из уровня техники неизвестна реализация этих признаков для получения указанных технических результатов.
На чертеже в качестве примера приведена функциональная схема системы, реализующей предложенный способ защиты грузоподъемного крана.
Система защиты грузоподъемного крана содержит цифровой вычислитель 1, который может именоваться также блоком обработки данных, блоком индикации, блоком управления и т.п., датчики параметров работы крана и параметров гидросистемы 2 и исполнительное устройство 3, объединенные между собой при помощи отдельных проводов или мультиплексной линии связи - CAN, LIN и т.п.
Цифровой вычислитель 1 выполнен на основе микроконтроллера 4 и подключенных к нему блока энергонезависимой Flash-памяти 5, устройства ввода/вывода информации 6, часов реального времени 7, органов управления (кнопок, переключателей, клавиш и т.п.) 8 и индикаторов 9 (светодиодных, жидкокристаллических и т.п.).
Датчики 2 могут иметь как аналоговые, так и цифровые выходы. Возможно также применение в одной системе защиты датчиков как с аналоговыми, так и с цифровыми выходами. В соответствии с их исполнением устройство ввода/вывода информации 6 выполнено в виде многоканального аналого-цифрового преобразователя (АЦП) или в виде трансивера или драйвера мультиплексного последовательного канала обмена данными. АЦП и/или трансивер или драйвер мультиплексного канала обмена данными могут входить также в состав микроконтроллера 4. Устройство ввода/вывода информации 6 может содержать также схемы усиления сигналов, согласования по уровню и защиты цифрового вычислителя 1 от перенапряжений в линиях связи, обеспечивающие возможность подключения к цифровому вычислителю 1 датчиков 2, включая дискретные датчики (концевые выключатели), и исполнительного устройства 3.
Исполнительное устройство 3 выполнено на основе электромагнитных реле или силовых электронных ключей, подключенных к электрогидравлической или электромеханической системе управления грузоподъемного крана. Это устройство может быть конструктивно объединено с цифровым вычислителем 1 или выполнено в виде отдельного блока. Если исполнительное устройство 3 подключено к цифровому вычислителю 1 при помощи мультиплексного канала обмена данными, то это устройство содержит микроконтроллер и соответствующий трансивер или драйвер этого канала. В последнем случае к исполнительному устройству 3 могут подключаться часть датчиков, например концевые выключатели положений рычагов управления краном, или все датчики 2. При этом исполнительное устройство 3 дополнительно используется для передачи (трансляции) сигналов этих датчиков 2 в цифровой вычислитель 1. Исполнительное устройство 3 может также входить в состав устройства ввода/вывода информации 6, т.е. может быть объединено с ним.
Датчики параметров работы крана и параметров работы гидросистемы 2 в общем случае включают в себя датчик нагрузки (датчик силы или датчики давления в гидроцилиндре подъема стрелы) 10, объединенный датчик угла наклона и длины стрелы (датчик вылета) 11 (или раздельные датчики угла наклона и длины стрелы), датчик угла поворота крана (датчик азимута) 12, датчик скорости вращения вала насоса или силового агрегата крана 13, датчик давления в гидравлической системе крана 14, датчик температуры рабочей жидкости 15, и дополнительные датчики 16 - датчик крутящего момента на валу насоса, датчик расхода рабочей жидкости, датчик предельного подъема грузозахватного органа, датчик приближения к линии электропередачи, и другие датчики, необходимость установки которых определяется конструкцией грузоподъемного крана, на который устанавливается система защиты, и требованиями к этой системе. Часть указанных на чертеже датчиков может не устанавливаться. В системе могут быть также установлены дополнительные датчики, не указанные на чертеже.
Поясним суть предложенного способа на примере работы реализующей его системы защиты крана.
Перед началом работы грузоподъемного крана крановщик при помощи органов управления 8 устанавливает допустимые или пороговые уровни параметров работы грузоподъемного крана, характеризующих его геометрию, условия или режим работы. К ним относятся ограничения по координатной защите, вид используемого стрелового оборудования (наличие, длина и угол наклона гуська), характеристики опорного контура и т.д. Количество и вид этих параметров определяются конструкцией конкретного грузоподъемного крана и требованиями к его безопасной эксплуатации. Эти параметры сохраняются в памяти микроконтроллера 4 или в блоке памяти 5.
Кроме того, в память микроконтроллера 4 или в блок памяти 5 предварительно (до начала работы крана) записываются величины нагрузок, допустимых для различных пространственных положений стрелы или грузозахватного органа крана. Эти величины определяются, как правило, расчетным путем при проектировании крана и представлены в виде его грузовых характеристик.
Одновременно в память микроконтроллера 4 или в блок памяти 5 предварительно (до начала работы крана) записываются предельные значения диагностических параметров, характеризующих техническое состояние гидросистемы крана. В качестве таких параметров могут быть приняты, в частности, минимально допустимая величина КПД какого-либо гидропривода, минимально допустимая величина скорости движения под нагрузкой стрелы, поворотной платформы крана или грузозахватного органа, максимально допустимая температура рабочей жидкости в гидросистеме и т.п. Выбор вида этих параметров и соответствующего набора датчиков для их прямого или косвенного измерения осуществляется разработчиком крана или его системы защиты и зависит от конструкции конкретного грузоподъемного крана. При этом предельные значения диагностических параметров определяются, как правило, расчетным путем и являются, фактически, критериями оценки работоспособности и технического состояния гидросистемы крана.
Предельные значения диагностических параметров в общем случае зависят от нагрузки, пространственного положения стрелы или грузозахватного органа крана, и/или скорости вращения вала насоса или силового агрегата крана и других параметров работы крана. Например, КПД гидропривода зависит как от нагрузки на этот привод, так и от скорости перемещения того узла крана, который приводится в движение этим приводом. Поэтому предельные значения диагностических параметров в общем случае определяются и запоминаются в виде функций параметров работы крана и/или параметров работы гидросистемы. Кроме того, предельные значения диагностических параметров, как правило, зависят от направлений движения стрелы, грузозахватного органа или поворотной платформы крана. Поэтому они определяются и запоминаются различными для различных направлений этих движений.
Предельные значения диагностических параметров могут определяться не только расчетным путем, но и путем проведения необходимых измерений на грузоподъемном кране, а также путем сбора эксплуатационных данных о допустимых параметрах работы гидросистемы.
В памяти микроконтроллера 4 или в блоке памяти 5 эти параметры могут быть представлены в виде соответствующих таблиц, формул или математических моделей (в частности, в виде системы уравнений с соответствующими коэффициентами, ограничениями и т.п.), использующихся в программе работы микроконтроллера 4 и позволяющих вычислить предельное значение диагностического параметра для текущего сочетания значений параметров работы крана и его гидросистемы, измеренных при помощи датчиков 2.
Микроконтроллер 4 цифрового вычислителя 1 работает по программе, записанной в его встроенной памяти программ или в блоке памяти 5, и через устройство ввода/вывода информации 6 осуществляет обмен с датчиками параметров работы крана и гидросистемы 2 по общему мультиплексному каналу обмена данными или по отдельным проводам. После получения информации от датчиков 2 (10-16) микроконтроллер 4 определяет действительные значения рабочих параметров крана - текущую нагрузку крана и фактическое положение его грузоподъемного (стрелового) оборудования. При необходимости, для определения текущей нагрузки крана и текущего положения его стрелы или грузозахватного органа, осуществляются преобразования выходных сигналов датчиков 2. Это имеет место в случае, когда текущая нагрузка крана, положение его стрелы или грузозахватного органа измеряются косвенным образом, например при определении нагрузки стрелового гидравлического крана по давлениям в штоковой и поршневой полостях гидроцилиндра подъема стрелы. Эти преобразования реализуются программно.
Микроконтроллер 4 цифрового вычислителя 1 осуществляет сравнение текущего положения стрелы или грузозахватного органа с допустимыми уровнями, заданными крановщиком при введении параметров координатной защиты, а также сравнение текущей нагрузки крана с запомненной допустимой нагрузкой для текущего пространственного положения стрелы или грузозахватного органа. Далее, в зависимости от результатов этого сравнения, т.е. при приближении стрелы крана к границам разрешенной зоны работы по координатной защите или в случае превышения максимально допустимой нагрузки крана, микроконтроллер 4 формирует предупреждающие сигналы для крановщика, поступающие на индикаторы 9, или сигналы управления исполнительными механизмами грузоподъемного крана, которые через устройство ввода/вывода информации 6 поступают на исполнительное устройство 3, блокируя работу крана. Благодаря этому осуществляется координатная защита и защита крана от перегрузки.
Дополнительно в процессе работы крана цифровой вычислитель 1 при помощи индикаторов 9 обеспечивает отображение основных параметров работы крана.
Одновременно микроконтроллер 4, после получения необходимых данных о параметрах работы крана и его гидравлической системы при помощи датчиков 2, осуществляет вычисление текущих значений диагностических параметров гидросистемы крана, например КПД гидропривода подъема груза или скорость подъема стрелы под нагрузкой. При этих вычислениях используются зависимости этих диагностических параметров от параметров работы крана и гидросистемы, предварительно определенные и сохраненные в памяти микроконтроллера 4 или в блоке памяти 5 в виде формулы или таблицы. Вычисления диагностических параметров могут осуществляться также с использованием записанной в блоке памяти 5 математической модели грузоподъемного крана и/или его гидросистемы.
В отдельных случаях возможно прямое измерение диагностического параметра гидросистемы крана. Это имеет место когда, например, в качестве диагностического параметра используется температура рабочей жидкости гидросистемы, а система безопасности имеет датчик, осуществляющий прямое измерение этой температуры.
Далее микроконтроллер 4 сравнивает текущее значение диагностического параметра с предельно допустимым (для существующей в момент этого сравнения реальной нагрузки крана, для текущего направления движения соответствующего механизма крана и т.п.) и в зависимости от результатов этого сравнения при помощи индикаторов 9 формирует предупреждающие сигналы для крановщика о необходимости проведения соответствующих ремонтных или профилактических работ или при помощи исполнительного устройства 3 отключает механизмы крана, если текущее значение этого диагностического параметра превышает допустимое. В другом варианте реализации предложенного способа микроконтроллер 4, в случае такого превышения, осуществляет снижение максимально допустимой нагрузки на кран из условия обеспечения его безопасной работы. Одновременно это приводит к увеличению срока службы крана.
Для документирования работы грузоподъемного крана и технического состояния его гидросистемы система защиты может содержать встроенный регистратор параметров, реализованный на основе блока памяти 5 и часов реального времени 7. Считывание данных регистратора осуществляется с использованием внешнего устройства считывания, подключаемого к устройству ввода/вывода информации 6 или к дополнительному интерфейсному устройству, в том числе беспроводному, условно не показанному на чертеже. Считанные данные используются для анализа и для расследования причин аварий, а также для оценки технического состояния грузоподъемного крана и его гидросистемы.
Реализация отличительных признаков предложенного технического решения обеспечивает полноту, достоверность и оперативность диагностирования гидросистемы за счет осуществления ее контроля при работе крана в динамических режимах под нагрузкой, снижение затрат энергии на выполнение грузоподъемных операций путем предотвращения работы крана при низком КПД гидравлического привода, а также повышение эффективности защиты грузоподъемного крана от перегрузки путем снижения максимально допустимой нагрузки на кран при ухудшении технического состояния его гидросистемы.
Источники информации
1. RU 2151732 С1, МПК 7 В66С 15/00, 23/88, 27.06.2000.
2. US 5730305 А, МПК 6 В66С 13/16, 13/18, 24.03.1998.
3. RU 2004113739 А, МПК 7 В66С 23/88, 13/18, опубл. 20.10.2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗОК | 2004 |
|
RU2276096C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2298518C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙ ПРИ РАБОТЕ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2306255C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2009 |
|
RU2396202C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271332C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2006 |
|
RU2335451C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
Изобретения относятся к системам защиты, контроля и управления грузоподъемных кранов. В способе защиты грузоподъемного крана от перегрузки осуществляют предварительное определение и запоминание как допустимых значений нагрузки, так и значений диагностического параметра, характеризующего техническое состояние гидросистемы крана. В процессе работы крана осуществляют измерение и сравнение текущих значений нагрузки и диагностического параметра с допустимыми значениями и последующее формирование предупреждающего сигнала или блокирование работы крана. Дополнительно определяют скорость вращения вала насоса или силового агрегата крана и скорость движения стрелы или грузозахватного органа и/или поворотной платформы крана, после чего указанное определение текущего значения диагностического параметра осуществляют с учетом значений этих скоростей. Устройство для осуществления способа содержит цифровой вычислитель, реализованный на основе микроконтроллера, исполнительное устройство и датчики параметров работы грузоподъемного крана и его гидросистемы. Изобретение обеспечивает полноту, достоверность и оперативность диагностирования гидросистемы за счет осуществления ее контроля при работе крана в динамических режимах под нагрузкой и позволяет снизить затраты энергии на выполнение грузоподъемных операций путем предотвращения работы крана при низком КПД гидравлического привода. 2 н. и 11 з.п. ф-лы, 1 ил.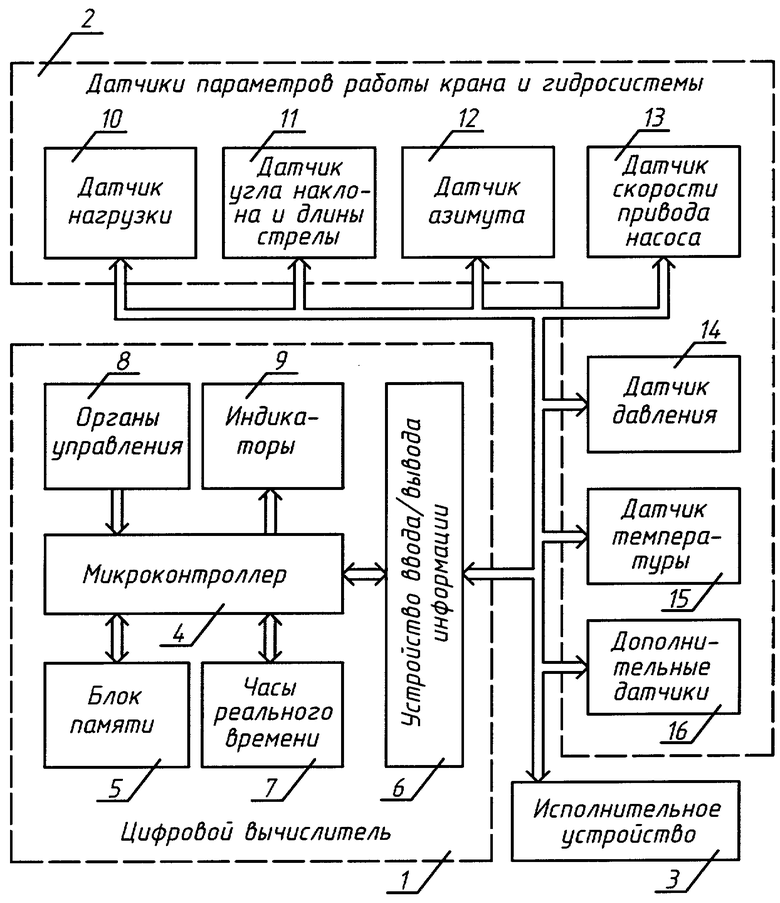
| RU 2004113739 А, 20.10.2004 | |||
| US 5730305 А, 24.03.1998 | |||
| УСТРОЙСТВО БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2151732C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 1997 |
|
RU2133453C1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |

