Изобретение относится к автомобильной электронике и может быть использовано для формирования сигналов торможения самоходных средств и в автоматических системах определения тормозного пути в процессе испытаний транспортных средств.
Наиболее близким к изобретению является способ, заключающийся в том, что информацию о движении преобразуют в скорость в виде первой последовательности импульсов, а интервалы между упомянутыми импульсами заполняют импульсами второй последовательности с более высокой постоянной частотой, запоминают и путем сравнения количества импульсов, запомненных в предыдущем и последующем интервалах между импульсами первой последовательности, определяют знак ускорения, по отрицательному значению которого формируют и запоминают сигнал "Начало торможения" (НТ), и с этого момента заполняют первый счетчик-сумматор импульсами первой последовательности, приведенными к линейным размерам пути, а результат отображают на индикации, причем в период торможения каждое запомненное количество импульсов в одном из выделенных интервалов первой последовательности сравнивают с заранее заданным количеством импульсов, соответствующим минимальной скорости транспортного средства, а при превышении первого значения над вторым формируют сигнал "Торможение юзом", которым запрещают поступление на счетчик-сумматор импульсов первой последовательности, а разрешают поступление кодов тормозного пути, которые формируют с выхода инерционного децелерометра, жестко закрепленного на транспортном средстве. При этом с появлением сигнала "Начало торможения" запоминают приведенное к линейным размерам пути количество импульсов первой последовательности на втором счетчике-сумматоре, определяют разность значений между первым и вторым счетчиками-сумматорами и отображают ее на дополнительном индикаторе, а после полного останова транспортного средства фиксируют на этом индикаторе полученное значение разности как значение тормозного пути на участке юза /1/.
Наиболее близким к изобретению является устройство для определения тормозного пути транспортного средства содержащее датчик пути, инерционный децелометр, блок определения тормозного пути, индикатор тормозного пути на участке юза, индикатор общего тормозного пути, причем выход датчика пути и инерционного децелометра соединен с первым и вторым входами блока определения тормозного пути, блок определения тормозного пути, содержащий блок преобразования информации о движении в скорость, генератор постоянной частоты импульсов, блок определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом", первый, второй и третий элементы И, делитель, первый и второй счетчики-сумматоры, вычитатель, блок усиления и формирования кодов тормозного пути от децелерометра, при этом первым и вторым входами блока определения тормозного пути являются входы блока преобразования информации о движении в скорость и блока усиления и формирования кодов тормозного пути от децелерометра, выход блока преобразования информации о движении в скорость соединен с первым входом блока определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом" и одновременно с первым входом первого элемента И, выход которого через делитель соединен одновременно с первым входом второго элемента И и входом первого счетчика-сумматора, выход которого соединен с первым входом вычитателя, второй вход которого соединен с выходом второго счетчика-сумматора, первый и второй входы которого соединены соответственно с выходами второго и третьего элементов И, вторые входы которых соединены соответственно со вторым и третьим выходами блока определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом", первый выход которого соединен одновременно со вторым входом первого элемента И и третьим входом блока усиления и формирования кодов тормозного пути от децелерометра, второй вход соединен с выходом генератора постоянных сигналов, выход которого соединен со вторым входом блока определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом", третий вход которого является входом сигнала «Уставка Vmin», выход вычитателя и выход второго счетчика-сумматора являются соответственно первым и вторым выходами блока определения тормозного пути /1/.
Недостатком данных способа и устройства является определение тормозного пути без учета длительности нажатия на педаль тормоза, что приводит к различным режимам торможения, а в конечном случае к ошибкам определения тормозного пути.
Цель изобретения повышения достоверности определения тормозного пути путем обеспечения при торможении транспортного средства заданной длительности нажатия на педаль тормоза.
Технический результат изобретения достигается тем, что в способе определения тормозного пути транспортного средства, заключающемся в том, что информацию о движении транспортного средства получают в виде первой последовательности импульсов, например с помощью магнитоэлектрического датчика, установленного на валу спидометра транспортного средства, интервалы между упомянутыми импульсами заполняют импульсами второй последовательности с более высокой постоянной частотой, запоминают количества импульсов в предыдущем и последующем интервалах между импульсами первой последовательности, путем сравнения запомненных количеств импульсов определяют знак ускорения, по отрицательному значению ускорения формируют и запоминают сигнал "Начало торможения", с этого момента заполняют первый счетчик-сумматор импульсами первой последовательности, приведенными к линейным размерам пути, при этом в период торможения каждое запомненное количество импульсов в одном из выделенных интервалов между импульсами первой последовательности сравнивают с заранее заданным количеством импульсов, соответствующим минимальной скорости транспортного средства, и при превышении первого значения над вторым формируют сигнал "Торможение юзом", которым запрещают поступление на первый счетчик-сумматор импульсов первой последовательности, а разрешают поступление кодов тормозного пути, которые формируют с выхода инерционного децелерометра, жестко закрепленного на транспортном средстве, с появлением сигнала "Начало торможения" запоминают приведенное к линейным размерам пути количество импульсов первой последовательности вторым счетчиком-сумматором, определяют разность значений между первым и вторым счетчиками-сумматорами, дополнительно выбирают режим торможения транспортного средства за счет осуществления заданной длительности нажатия на педаль тормоза, оценивают соответствия заданного режима торможения путем сравнения текущего значения длительности воздействия на педаль тормоза с заданным значением, при этом осуществляют выдачу сигнала на индикатор соответствия режима торможения в случае превышения текущих значений длительности нажатия на педаль тормоза над заданными, осуществляют выдачу индикации о значениях полного тормозном пути и тормозного пути на участке юза, после выдачи сигнала о соответствии режима торможения и после полной остановки транспортного средства.
Способ реализуется в устройстве для определения тормозного пути транспортного средства, содержащем датчик пути, инерционный децелометр, блок определения тормозного пути, индикатор тормозного пути на участке юза, индикатор общего тормозного пути, причем выход датчика пути и инерционного децелометра соединен с первым и вторым входами блока определения тормозного пути, блок определения тормозного пути содержит блок преобразования информации о движении в скорость, генератор постоянной частоты импульсов, блок определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом", первый, второй и третий элементы И, делитель, первый и второй счетчики-сумматоры, вычитатель, блок усиления и формирования кодов тормозного пути от децелерометра, при этом первым и вторым входами блока определения тормозного пути являются входы блока преобразования информации о движении в скорость и блока усиления и формирования кодов тормозного пути от децелерометра, выход блока преобразования информации о движении в скорость соединен с первым входом блока определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом" и одновременно с первым входом первого элемента И, выход которого через делитель соединен одновременно с первым входом второго элемента И и входом первого счетчика-сумматора, выход которого соединен с первым входом вычитателя, второй вход которого соединен с выходом второго счетчика-сумматора, первый и второй входы которого соединены соответственно с выходами второго и третьего элементов И, вторые входы которых соединены соответственно со вторым и третьим выходами блока определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом", первый выход которого соединен одновременно со вторым входом первого элемента И и третьим входом блока усиления и формирования кодов тормозного пути от децелерометра, второй вход которого соединен с выходом генератора постоянных сигналов, выход которого одновременно соединен со вторым входом блока определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом", третий вход которого является входом сигнала «Уставка Vmin», выход вычитателя и выход второго счетчика-сумматора являются соответственно первым и вторым выходами блока определения тормозного пути, в которое дополнительно введены четвертый и пятый элементы И, контактный датчик нажатия на педаль, блок оценки режима торможения и индикатор заданного режима торможения, причем вход блока оценки режимов торможения соединен с выходом контактного датчика, а выход соединен одновременно с входом индикатора соответствия режима торможения и вторыми входами четвертого и пятого элементов И, первые входы которых соединены соответственно с первым и вторым выходами блока определения тормозного пути, а выходы соединены соответственно со входами индикатора тормозного пути на участке юза и индикатора общего тормозного пути.
Блок оценки режимов торможения состоит из генератора импульсов, элемента И, счетчика, порогового устройства, задатчика сигналов, причем входом блока оценки режимов торможения является первый вход элемента И, второй вход которого соединен с выходом генератора импульсов, а выход через счетчик соединен с первым входом порогового устройства, второй вход которого соединен с выходом задатчика сигналов, выход порогового устройства является выходом блока оценки режимов торможения.
Новыми признаками, обладающими существенными отличиями по способу, являются следующие действия:
- выбирают режим торможения транспортного средства за счет осуществления заданной длительности нажатия на педаль тормоза;
- оценивают соответствия заданного режима торможения путем сравнения текущего значения длительности воздействия на педаль тормоза с заданным значением;
- осуществляют выдачу сигнала на индикатор соответствия режима торможения в случае превышения текущих значений длительности нажатия на педаль тормоза над заданными;
- осуществляют выдачу индикации о значениях полного тормозного пути и тормозного пути на участке юза, после выдачи сигнала о соответствии режима торможения и после полной остановки транспортного средства.
В устройстве существенными отличиями являются четвертый и пятый элементы И, контактный датчик нажатия на педаль, блок оценки режима торможения, индикатор соответствия режима торможения и новые связи между элементами схемы.
На фиг.1 приведена структурная схема устройства определения тормозного пути, на фиг.2 - то же, блока определения тормозного пути, на фиг.3 - то же, блока оценки режимов торможения.
Устройство определения тормозного пути содержит датчик 1 пути, инерционный децелометр 2, блок 3 определения тормозного пути, индикатор 4 тормозного пути на участке юза, индикатор 5 общего тормозного пути, четвертый 6 и пятый 7 элементы И, контактный датчик 8 нажатия на педаль, блок 9 оценки режима торможения и индикатор 10 режима торможения, причем выход датчика 1 пути и инерционного децелометра 2 соединены с первым и вторым входами блока 3 определения тормозного пути, первый, второй и третий выходы которого соединены соответственно с первыми входами четвертого 6 и пятого 7 элементов И, выходы которых соединены со входами индикатора на участке юза, индикатором тормозного пути и входом индикации торможения. Контактный датчик 8 соединен через блок 9 оценки режима торможения одновременно со вторыми входами четвертого 6 и пятого 7 элементов И, входом индикатора соблюдения режима торможения.
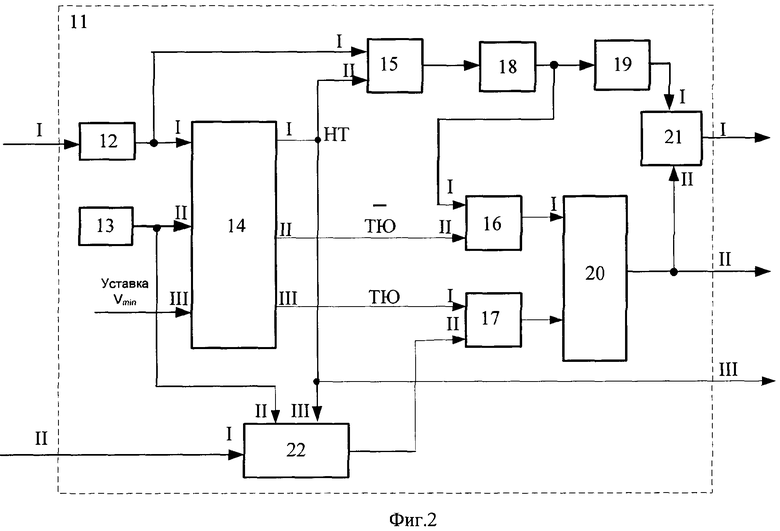
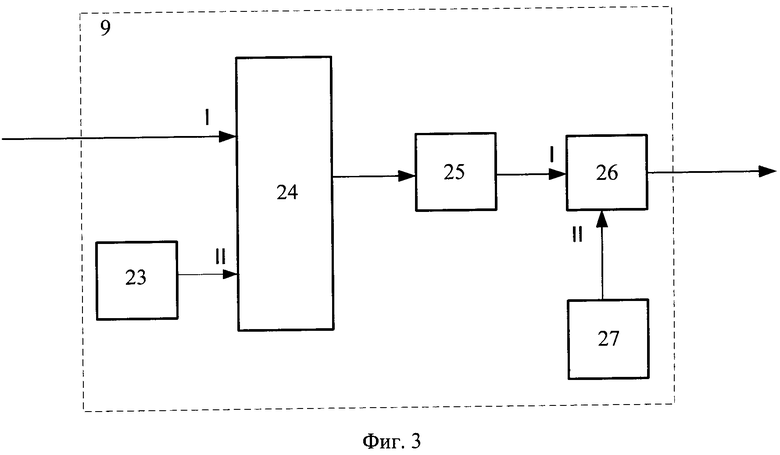
Блок 11 определения тормозного пути содержит блок 12 преобразования информации о движении в скорость, генератор 13 постоянной частоты импульсов, блок 14 определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом", первый 15, второй 16 и третий 17 элементы И, делитель 18, первый 19 и второй 20 счетчики-сумматоры, вычитатель 21, блок 22 усиления и формирования кодов тормозного пути от децелерометра. При этом первым и вторым входами блока 11 определения тормозного пути является вход блока 12 преобразования информации о движении в скорость и первый вход блока 22 усиления и формирования кодов тормозного пути от децелерометра, выход блока 12 преобразования информации о движении в скорость соединен одновременно с первым входом блока 14 определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом" и с первым входом первого 15 элемента И, выход которого через делитель 18 соединен одновременно с первым входом второго элемента И и с входом первого 19 счетчика-сумматора, выход которого соединен с первым входом вычитателя 21, второй вход которого соединен с выходом второго 20 счетчика-сумматора, первый и второй входы которого соединены соответственно с выходами второго 16 и третьего 17 элементов И, вторые входы которых соединены соответственно со вторым и третьим выходами блока 14 определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом", первый выход которого соединен одновременно со вторым входом первого 15 элемента И и третьим входом блока 22 усиления и формирования кодов тормозного пути от децелерометра 2, второй вход которого соединен с выходом генератора 13 постоянных сигналов, выход которого одновременно соединен со вторым входом блока 14 определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом", третий вход которого является входом сигнала «Уставка Vmin». Выход вычитателя 21, выход второго 20 счетчика-сумматора, первый выход блока 14 определения, формирования и запоминания сигналов "Начало торможения", "Условное торможение юзом", "Инверсное условное торможение юзом" являются соответственно первым, вторым и третьим выходами блока 11 определения тормозного пути. Блок 9 оценки режимов торможения состоит из генератора 23 импульсов, элемента И 24, счетчика 25, порогового устройства 26, задатчика 27 сигналов, причем вход блока 9 оценки режимов торможения является первый входом элемента И 25, второй вход которого соединен с выходом генератора 23 импульсов, а выход через счетчик 25 соединен с первым входом порогового устройства 26, второй вход которого соединен с выходом задатчика 27 сигналов, выход порогового устройства 26 является выходом блока 9 оценки режимов торможения.
Сущность предлагаемого способа заключается в следующем.
Информацию о движении транспортного средства S преобразуют в скорость (блок 12) в виде первой последовательности импульсов f1.
Это преобразование осуществляют, например, с помощью магнитоэлектрического датчика, установленного на валу тросика спидометра транспортного средства. В блоке 14 выделяют три интервала между импульсами первой последовательности f1 и заполняют каждый интервал импульсами второй последовательности f2. В процессе заполнения интервалов импульсами f2 осуществляют сравнение количества импульсов в первом N1 и во втором N2 интервалах, и если количество импульсов во втором интервале N2 больше количества импульсов в первом интервале N1, то формируют и запоминают сигнал "Начало торможения" (НТ), которым открывают элемент И (14), разрешают работу блока 21 и посылают на управление стоп-сигналами.
Количество импульсов в третьем интервале N3 сравнивают с числом-уставкой, соответствующим минимальной скорости транспортного средства, и если N3 больше значения уставки, то на выходе блока 14 формируют дополнительный сигнал "Условное торможение юзом" (ТЮ) и снимают сигнал  .
.
Так как сигнал НТ формируют раньше сигнала ТЮ, то с блока 12 через схему И 15 и делитель 18 в первый 19 счетчик поступают импульсы, которые подсчитываются с внутренним коэффициентом пересчета "К", задаваемым делителем 18, в линейные размеры тормозного пути. Импульсы с выхода счетчика 19 поступают на первые входы вычитателя 21. Параллельно импульсы с делителя 18 через открытый элемент И 16 поступают на счетный вход второго счетчика-сумматора 20 и далее на вторые входы вычитателя 21 и в блок индикации 5 общего тормозного пути Sто.
Поскольку на первых и вторых входах вычитателя 21 - одно и то же число, то на индикаторе 4 будет отображаться нулевое значение тормозного пути (Sтю).
При появлении на выходе блока 14 сигнала ТЮ ("Условное начало торможения юзом") элемент И 16 закрывается, открывается элемент И 17 и на вторые входы счетчика-сумматора 20 начинают поступать коды тормозного пути с децелерометра 2 через блок 22.
Пока нет истинного юза, значения тормозного пути на выходах счетчиков-сумматоров 19 и 20 имеют одинаковые значения, а на выходе вычитателя 21 сохраняется нулевое значение.
При наличии истинного юза поступление импульсов с блока 12 прекращается, отчего на выходах счетчика-сумматора 19 фиксируется соответствующее значение тормозного пути, а на выходах счетчика-сумматора 20 продолжает изменяться значение тормозного пути до момента отключения инерционного децелерометра 2, т.е. до момента полного останова транспортного средства.
Блок 9 оценки режимов торможения предназначен для контроля режима торможения путем оценки длительности нажатия на педаль тормоза, так как разброс в длительности нажатия на педаль тормоза оказывает влияние на значения тормозного пути.
При нажатии на педаль тормоза срабатывает контактный датчик, который выдает сигнал на первый вход элемента И 24, на второй вход которого поступает сигнал с выхода генератора 23 импульсов, с выхода элемента И 24 сигнал поступает на счетчик 25, который определяет текущую длительность нажатия на педаль тормоза. Для осуществления сравнения текущей длительности нажатия на педаль тормоза с заданным значением используется пороговое устройство 26.
Сигнал с счетчика 25 поступает на первый вход порогового устройства 26, на второй вход которого поступает сигнал с выхода задатчика 27 сигналов.
В случае, если длительность нажатия на педаль тормоза будет больше заданного значения, то тогда сигнал с выхода порогового устройства 26 поступает на вторые входы пятого 6 и шестого 7 элементов И, обеспечивая тем самым прохождение сигналов на индикаторы 4, 5 и 10.
В момент полного останова транспортного средства на индикаторе 4 отображается чистое значение тормозного пути на участке юза, а именно Sтю=Sто-Sт.
При отсутствии юза поступление импульсов с блока 12 и с децелерометра 2 прекращается одновременно, т.е. на выходах счетчиков-сумматоров 19 и 20 зафиксируются одинаковые значения, отчего на индикаторе 4 будет отображаться нулевое значение, а на индикаторе 5 - значение тормозного пути Sто=Sт.
Таким образом, тормозной путь определяется в соответствии с заданным режимом торможения, что позволить исключить влияние случайного фактора, обусловленного длительностью нажатия на педаль тормоза.
Источник информации
1. Патент РФ №2289803, кл. G01M 17/007 (2006.01) от 11.07.2005 г.
Изобретение относится к автомобильной электронике и может быть использовано в автоматических системах определения тормозного пути. Способ заключается в выборе режима торможения транспортного средства за счет осуществления заданной длительности нажатия на педаль тормоза, оценке соответствия заданного режима торможения, осуществлении выдачи сигнала на индикатор соответствия режима торможения в случае превышения текущих значений длительности нажатия на педаль тормоза над заданными, осуществлении выдачи индикации о значениях полного тормозного пути и тормозного пути на участке юза, после выдачи сигнала о соответствии режима торможения и после полной остановки транспортного средства. Устройство дополнительно содержит четвертый и пятый элементы И, контактный датчик нажатия на педаль, блок оценки режима торможения, индикатор соответствия режима торможения. Вход блока оценки режимов торможения соединен с выходом контактного датчика, а выход соединен одновременно с входом индикатора соответствия режима торможения и вторыми входами четвертого и пятого элементов И, первые входы которых соединены соответственно с первым и вторым выходом блока определения тормозного пути, а выходы соединены соответственно со входами индикатора тормозного пути на участке юза и индикатора общего тормозного пути. Технический результат заключается в повышении достоверности измерения тормозного пути. 2 н. и 1 з.п. ф-лы, 3 ил.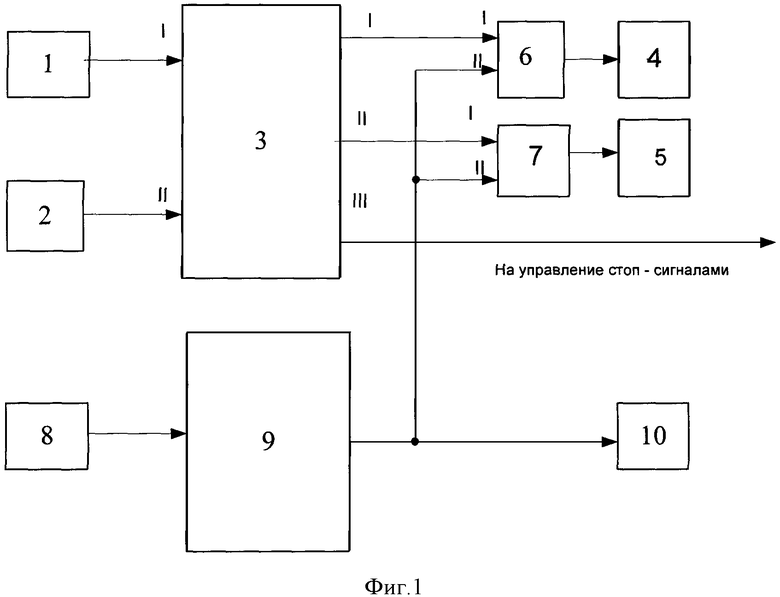
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2289803C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157517C1 |
| Устройство для контроля исправностиТОРМОзА | 1979 |
|
SU840694A1 |
| DE 10044223 A1, 12.04.2001. | |||

