(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО
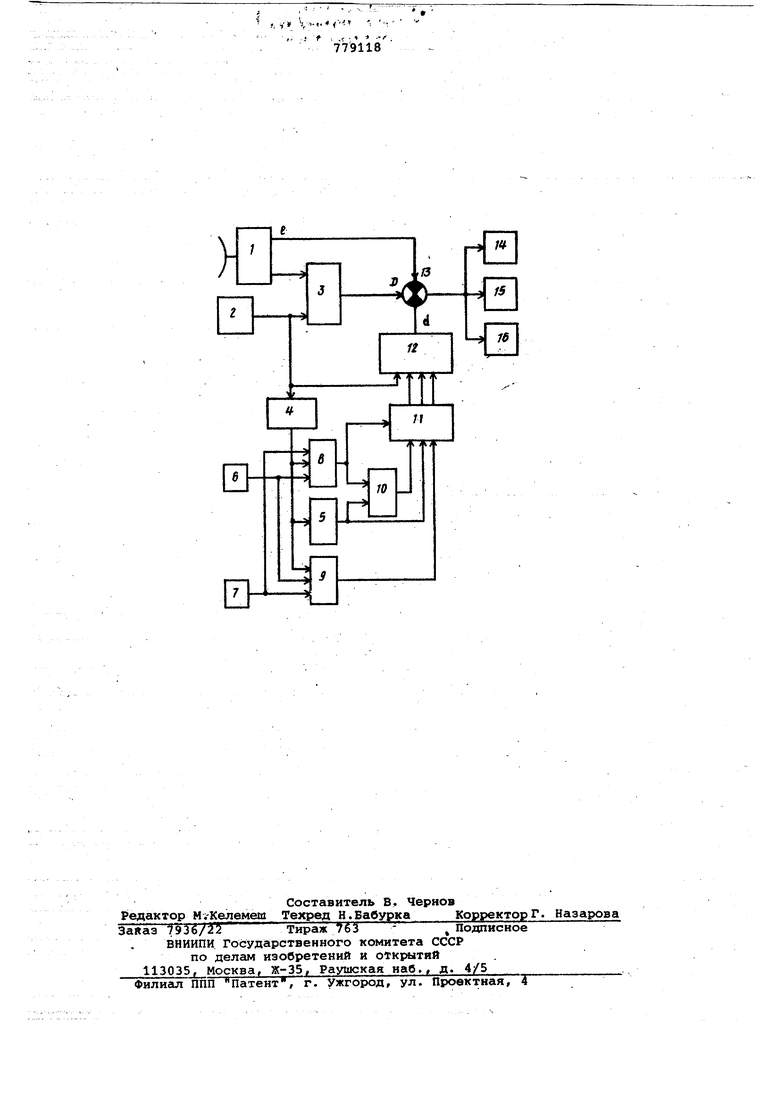
ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПЕРЕД ПРЕПЯТСТВИЕМ Изобретение относится к транспортной технике и может быть использовано в автоматических устройствах управления транспортным средством для предотврадения столкновенЦй автомобилей за счет управления замедлением транспортного средства перед препятствием в соответствии с уровнем тормозных качеств, ограниченным его техническим состоянием, пог6дндаш и дорожншлн УСЛОВИЯМИ. Устройство применимо ДЛЯ транспортных средств с пневматическими ИЛИ гидравлическими системами привода тормозов, а также для оборудования против об локировочньми системами. Известно локационное устройство на автомобиле, содержащее блок измерения абсолютной скорости транспортного средства, связанный с дифференци атором и с блоком вычисления безопасной дистанции между транспортным сред ством и лидером, выход которого подключен к блоку сравнения, связанному с исполнительными органами тормозной системы и системы управления двигателем, и локатор, один из выходов ко торого подк.пючен к блоку сравнения, а другой к блоку вычисления безопасной дистанции. В этом устройстве на основе параметров дистанции до преПятствия, скорости сближения и абг солютной ск.орости предотвращается столкновение транспортных средств tlj, .Недостаток ., известного устройства - невозможйость корректировки дистанции в зависимости от параметров максимально возможного реализуемого замедления по погодным, дорожным УСЛОВИЯМ и техническому состоянию транспортного средства, что снижает точность определения безопасной дистанции и может iпривести к дорожно-транспортным происшествиям при увеличении безопасной дистанции в указанных условиях или к преждевременным срабатываниям тормозов в случае ПОЛНОЙ реализации тормозных свойств автомобиля. Цель изобретения - повышение точности определения безопасной дистанции при изменяющихся ;дорожно-климати- ческих УСЛОВИЯХ и Техническом состояний транспортного средства, .Указанная цель достигается теМ, что устройство снабжено блоком определения установившегося замедления транспортного средства, связанным с выходом дифференциатора, и детектором предельного замедления, выходы которых подключены ко входам блока определения установившегося замед ления лидера, блоком определения j a Шздывания тормозов, запомйнающйм устройством, информационные входы ко второго подключены к выходам указанвьах блоков определения установившего ея замедления лидера, установдвшего ей зШёДИёния транспоЕ тного средства и запаздывания тормозов, а разрешаю щий; в }сод - к выходу детектора пре дельнЪго замедления, и блоком bri Трёде яений попрайки к величине без-, опасной дистанции, -выход которого подключен к блоку сравнения, а входы связаны с указанными запоминающим устройством и блоком измерения абсолютной скорости, при этом устройство имеет датчик давления в приводе тор MOSb B и датчик начала торможения, в шойй которых совместно с выходом дифференциатбра подключены к детектору предельного замедления и блоку сУпрёДеяенйя запаздывания тормозов. {Га чертеже представлена блок-схема устройства. Предлагаемое устройство представляет совокупность локатора 1 для 6пределения расстояния Е.и относительной скорости до препятствия (лидера) и блока 2 измерения абсолютной скорости транспортногб срёдсЯа Ц йод слюченных к блоку 3 вычисления безопасной дистанции D межяу транспортным средством и лидером. Выход блока 2 измерения абсолютной скорости подсоединён ко входу дифференциатора 4, выход которого подключен ко входу блока 5 определения, установившег 6ся замедления транспортного сред ства и, параллельно с вы}1:одами датчиков б и 7 давления в приводе тормозов и начала торможения, к входам детектора 8 предельного замедления и блока 9 определения запаздывания тормозов, причем выходы блока 5определения установившегося замедления идетектора, 8 подсоединены к входам блока 10 определения установившегося замедлениялидера, выход которого, совместно с выходами блоков 5 и 9 определения установившегося замедления транспортного средства и запаздыван я тормозов, подключены к информационным входам запоминающего устройства 11, к разрешакяцему входу подключен выход детёкггсф® 1 8 а выходы запоминающего устройства 11 совместно с выходом блока 2 измерения «абсолютной скорости, подключены к .входам блока 12 определения jipjnpaB кй d к величине безопасной дистанции О, выход которого, совместно с выходом локатора 1 и блока 3 вычисления безопасной дистанции, подсоединены к входам блока 13 сравнения Вызсбд которого подключен к блоку 14 индикации, к исполнительным органам ристемы управления двигателем 15 и тормозной системой 16. Узлы устройства работают в следующей последовательности. .Непрерывно работающий во время движения транспортного средства локаtop 1 выдает параметры дистанции до |1репятствия и относительной скорости HsTwi которые вместе с выдаваемым блоком 2 параметром поступают в блок 3 вычисления , безопасной дистанции р. Одновременно параметр абсолютной скорости Уд оступает в дифференциатор 4 и блок 12 определения поправки d к величине безопасной дистанции 0. При торможениях, в которых достигнуто и зафиксировано детектором 8 . предельное для данных дорожно-климатических условий и технического состояния тормозов замедление, определяются и запоминаются величины предельного осредненного установившегося замедления транспортного средства, лидера и минимальное время запаздывания тормозов. В момент начала торможения фиксируемого датчиком 7, производится уста.новка в О элементов памяти блока 11 и детектора 8, а блок 9 начинает отсчет времени запаздывания 1д, который заканчивается в момент начала ройта замедления. В этот же йомент блок 5 начинает производить определение осредненного установивше-, гося,3амедления транспортного средства, которое заканчивается через фиксированный отрезок времени, значительно превышающий длительность нарастания замедления до максимума. Детектором 8 фиксируется факт достижения транспортным средством предельного замедления на основе сравнения по временя моментов максимума замедления и давления и сопоставления давления с предельн ым фиксироваиньЙ значением. При ограничении величины предельного замедления дорожно-климатическими УСЛОВИЯМИ, блок 10 подключает к каналу записи предельного установившегося замедления лидера выход блока 5 определения установившегося замедления транспортного средства. При ограничении замедления транспортного средства его техническим состоянием, блок 10 подключает к каналу установившегося замедления лидера фиксированный сигнал, cooTBeTCTBsnoщий предельному замедлению исправного трайспортного средства в норматив йых условиях. Кроме того, при достижении транспортным, средством предельного замедления, детектор 8 дает разрешение на прием информации о параметрах от блоков 5, 9 и 10 в запоминакяцее устройство 11, где параметры обновляются при торможениях, в которьгх зафиксировано предельное замедлеРгие,.-в промежутках между таКими торможениями зафиксированный набор этих параметров используется совместно с величиной абсолютной CKqpocTH, непрерывно поступаюгдей в
процессе дорожного движения от блока 2, для вычисления блоком 12 поправки d к величине безопасной дистанции. О, определяемой блоком 3. блок 13 сравнения непрерывно в процессе дорожного движения производит сравнение фактического расстояния до препятствия (лидера) с разностью величин безопасной дистанции О и поправки d,первая из которых определяется в функции тоЛько абсолютной и относительной скоростей транспортног средства, а вторая - в функции абсолютной скорости {.,осредненной предельной величины установившегося замедления транспортного средства 3 предельного установившегося замедления лидера, Зд и времени запаздывания тормозов транспортного средства t. При сокращении фактического расстояния до лидера (препятствия) ниже безопасного уровня, блок 13 сравнения выдает команду на включени исполнительных механизмов 15 и 16 управления дроссельной заслонкой и тормозами и на блок 14 индикации.
Управлений дальнейшим процессом снижения скорости транспортного средства выполняется аналогично описанному, а также и в известном устройстве, до совпадения фактического значения дистанции с непрерь1йно определяемой величиной безопасной диста нции.
Предлагаемое устройство приводит к уменьшению травматизма и экономи ческого урона от дорожно-транспорт ных происшествий, вызванных несоблюяением безопасной дистанции до препятствия, соответствующей погодным, (ДОрожным условиям и техническому состоянию автомобиля, что является непосредственной причиной значительного количества столкновений транспорт ных средств, наездов на препятствия, на неподвижные транспортные средства и на пешеходов.
Формула изобретения
Устройство для автоматического торможения транспортного средства
перед препятствием, содержащее блок измерения абсолютной скорости транспортного средства, связанный с дифференциатором и с блоком вычисления безопасной дистанции между транспортным средством и лидером, выход которого подключен к блоку сравнения, связанному с исполнительными органами тормозной системы и системы управления двигателем, и локатор, один из выходов которого подключен к упрмя0 нутому блоку сравнения, а другойк упомянутомуЯблоку вычисления безопасной дистанции, отличающеес я тем, что, с целью повышенияi.точности определения безопасной дистанции при изменяющихся дорожно-клиМатических условиях и при изменении технического состояния .транспортного рредства, устройство снабжено блоком определения установившегося замедпеQ ния транспортного средства, связанным с выходом дифференциатора, и детектором предельного замедления, выходы которых подключены ко входам блока определения установившегося замедления лидера, блоком определения запаз5дывания тормозов запоминающим устройством, информационные входы которого подключены к выходс1М указанных блоков определения установившегося замедления лидера, устайовившегося
0 замедления транспортного средства и запаздывания тормозов, а разрешающий вход - к .выходу детектора предельного замедленйяу и блоком опрё. деления поправки к величине безопасной дистанции, выход которого подключен к блоку сравнения, а входы связаны в указанными запоминакяцим устройством и блоком измерения абсолютной скорости, при этом устройство
имеет датчик давления в приводе тормодов и датчик начала торможения, вы ходы которых совместно с выходом дифференциатора подключены к детектору Предельного замедления и блоку определения запаздЬгаания тормозов.
Источники информации, принятые во внимание при экспертизе
1. Патент США 3835361, кл. 318/561, 1974 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2305641C1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2316822C1 |
| Устройство для автоматического торможения автомобиля | 1988 |
|
SU1643245A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЯ С ПРЕПЯТСТВИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429505C1 |
| Способ предотвращения столкновений со встречным препятствием на полосе движения | 2022 |
|
RU2788652C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТОРМОЖЕНИЯ ДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2147007C1 |
| Способ автоматического ограничения скорости движения транспортного средства | 2023 |
|
RU2807793C1 |
| Устройство для регулирования скорости движения транспортного средства | 1977 |
|
SU735454A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2018 |
|
RU2767214C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |