Предлагаемое изобретение относится к колесным осям, которые используются, например, в области железнодорожного транспорта, и, говоря более конкретно, это изобретение относится к контролю (или инспектированию) таких осей при помощи технологии(й) неразрушающего контроля.
Как это известно специалисту в данной области техники, некоторые колесные оси, в частности колесные оси, которые должны выдерживать значительные нагрузки, должны быть объектом выполнения неразрушающего контроля на различных стадиях их изготовления и технического обслуживания для того, чтобы они могли соответствовать международным стандартам. Известные способы неразрушающего контроля в настоящее время достаточно хорошо адаптированы для контроля сплошных (или массивных) колесных осей. Они основываются обычно на акустическом анализе, при помощи ультразвуковых зондов, а также, в случае необходимости, на дополнительном анализе, таком, например, как анализ поверхности или радиографический анализ. Среди стандартов, которым должны соответствовать сплошные колесные оси, можно упомянуть, в частности, такие нормативные документы, как NF EN 13261-2004 для Европы и ISO 5948-1994 и ISO 6933-1986 для всего мира, а также М 101/90-А для Соединенных Штатов Америки (Association of American Railroads (AAR)), NBR 7947-1989 для Бразилии и JIS E 4502-1-2002 для Японии.
На основе полученных данных анализа можно оценить положения недостатков и дефектов, поперечных или продольных, внутри сплошного материала, который образует ось, и определить, таким образом, соответствует или не соответствует эта ось международному стандарту (на изготовление или на периодическое техническое обслуживание).
Недавно было предложено заменять некоторые сплошные (или массивные) колесные оси на трубчатые колесные оси, стенка которых имеет профили с переменными наружным и внутренним радиусами. Эти новые трубчатые оси оказываются особенно предпочтительными, поскольку они позволяют обеспечить существенное снижение веса, обычно составляющее примерно 30% и, соответственно, увеличение транспортируемой нагрузки, сопровождаемое снижением расхода энергии и, соответственно, уменьшением загрязнения окружающей среды. Однако контроль трубчатой оси этого типа связан с определенным количеством проблем.
Действительно, по соображениям существования профиля с переменным внутренним радиусом, оказывается затруднительным дифференцировать отраженные сигналы, появляющиеся вследствие наличия угловых зон (или углов), возникающих в результате наличия структурных недостатков или дефектов.
В то же время, значительное количество этих недостатков и/или дефектов представляет размеры, меньшие, чем размеры недостатков и/или дефектов, встречающиеся в сплошной оси, что делает их выявление еще более затруднительным, принимая во внимание относительно небольшие расстояния, проходимые ультразвуком.
И наконец, позиционирование на определенных участках трубчатой оси некоторых видов оборудования, такого, в частности, как колеса (насаженные на эту ось с натягом) и тормозные диски, с целью формирования колесной оси, также способно вызвать появление дополнительных структурных недостатков и/или дефектов и даже увеличить размеры некоторых структурных дефектов и/или недостатков, возникающих в процессе выполнения предшествующих операций горячей ковки и механической обработки. Из этого следует, что в еще большей степени необходимо контролировать эти участки и примыкающие к ним зоны как в процессе первоначальной сборки, так и в процессе выполнения операций технического обслуживания (со снятием или без снятия оборудования колесной оси). Однако осуществление такого анализа с использованием существующих способов контроля оказывается затруднительным и даже невозможным на некоторых участках оси в том случае, когда эта колесная ось загромождена оборудованием.
Таким образом, техническая задача данного изобретения состоит в том, чтобы предложить способ и устройство неразрушающего контроля, позволяющие контролировать, по меньшей мере, полуавтоматическим образом и с достаточно высокой точностью большую часть и, если это возможно, всю трубчатую колесную ось (или, в более общем смысле, полого (трубчатого) изделия в форме тела вращения), в том числе в тех случаях, когда последняя снабжена оборудованием.
Для решения этой технической задачи в данном изобретении предлагается способ контроля трубчатых колесных осей, включающий следующие этапы, на которых:
а) размещают на контрольном стенде трубчатую колесную ось, содержащую стенку, которая имеет профили с переменными и известными наружным и внутренним радиусами;
b) размещают по меньшей мере один ультразвуковой зонд на наружной или внутренней поверхности этой стенки в первом месте, которое выбирается в зависимости от ее профилей и возможного загромождения оси, затем анализируют с использованием каждого зонда первого выбранного участка стенки в первом выбранном угловом секторе, ориентированном вдоль первого продольного или поперечного направления, с целью получения данных анализа для различных относительных угловых положений оси по отношению к зонду;
с) снова размещают по меньшей мере один зонд во второе место, которое также выбирается в зависимости от профилей и возможного загромождения оси, затем анализируют с использованием каждого вновь размещенного таким образом зонда второй выбранный участок стенки во втором выбранном угловом секторе, ориентированном вдоль второго направления, противоположного первому направлению, с целью получения других данных анализа для различных относительных угловых положений оси по отношению к зонду;
d) формируют на основе полученных данных анализа карты, характерные для поперечных или продольных ориентаций и положений показаний отраженных сигналов внутри стенки.
Здесь под выражением "показание отраженного сигнала" следует понимать информацию, полученную в стенке в результате отражения на поверхности раздела (между материалом и воздухом), или на недостатке, или же на дефекте (структурном). В то же время, здесь под выражением " недостаток" следует понимать ту часть стенки, которая вызывает отраженный сигнал, амплитуда которого меньше, чем выбранный порог, и которая, таким образом, не носит характера, требующего отбраковки данной оси. И наконец, здесь под выражением "дефект" следует понимать ту часть стенки, которая вызывает отраженный сигнал, амплитуда которого превышает упомянутый выбранный порог, и которая, таким образом, имеет характер, требующий отбраковки данной оси.
Способ в соответствии с предлагаемым изобретением может содержать многочисленные варианты реализации, по меньшей мере некоторые характеристики которых могут быть взяты в различных сочетаниях друг с другом, в частности:
- можно, например, осуществить, первый раз, этапы с b) по d), размещая каждый ультразвуковой зонд на наружной поверхности стенки для того, чтобы сформировать карты, характерные для положений и ориентаций показаний отраженных сигналов внутри стенки, после чего можно осуществить, второй раз, по меньшей мере этапы b) и d), размещая по меньшей мере один ультразвуковой зонд на внутренней поверхности стенки в некотором третьем месте, которое выбирается в зависимости от ее профилей, а затем проанализировать с использованием каждого зонда третий выбранный участок стенки в третьем выбранном угловом секторе, ориентированном вдоль по меньшей мере одного выбранного продольного или поперечного направления, для того, чтобы получить данные анализа для различных относительных угловых положений оси по отношению к зонду и сформировать карты, характерные для положений и ориентаций показаний отраженных сигналов внутри стенки;
- можно, например, осуществить этапы с b) по d) по меньшей мере один раз, размещая каждый ультразвуковой зонд на наружной или внутренней поверхности стенки для того, чтобы выполнить ультразвуковой анализ в угловом секторе, ориентированном вдоль продольного направления, и сформировать таким образом карты, характерные для поперечных ориентаций и положений показаний отраженных сигналов внутри стенки, а затем можно снова выполнить этапы с b) по d) еще по меньшей мере один раз, размещая по меньшей мере один ультразвуковой зонд на наружной или внутренней поверхности стенки для того, чтобы выполнить ультразвуковой анализ в угловом секторе, ориентированном вдоль поперечного направления, и сформировать таким образом карты, характерные для продольных ориентаций и положений показаний отраженных сигналов внутри этой стенки;
- после осуществления этапа d) можно, например, предусмотреть этап е), на котором осуществляют анализ по меньшей мере наружной поверхности стенки посредством другой технологии анализа, отличной от технологии, основанной на использовании ультразвука, для того, чтобы получить данные анализа для различных относительных угловых положений по меньшей мере одного зонда по отношению к оси, а также возможный этап f), на котором на основе этих полученных данных анализа формируют карты, характерные для положений и ориентаций показаний поверхности стенки;
- например, эта другая технология анализа может быть выбрана среди так называемой технологии потока утечки и так называемой технологии с использованием токов Фуко;
- можно, например, анализировать каждый из первых, вторых и возможных третьих участков стенки посредством относительного продольного перемещения по меньшей мере одного зонда по отношению к оси и/или посредством электронного сканирования с использованием по меньшей мере одного зонда;
- в процессе осуществления по меньшей мере одного из этапов b), с) и е) можно, например, обеспечить различные относительные угловые положения оси по отношению к каждому зонду, либо приводя во вращение эту ось по отношению к каждому зонду, либо приводя во вращение каждый зонд по отношению к этой оси;
- предлагаемый способ может содержать этап g), на котором сравнивают данные из карт, которые были получены в процессе этапа d), с данными из первых эталонных карт, которые предварительно были получены на первой эталонной оси того же типа, что и контролируемая ось, но лишенной дефектов, для того, чтобы запомнить только те данные, которые характерны для показаний отраженных сигналов, не представленных в этих первых эталонных картах, и сформировать, таким образом, "скорректированные" карты;
- предлагаемый способ может содержать этап h), на котором сравнивают данные из карт, которые были получены в процессе этапа d) или g), с данными из вторых эталонных карт, которые были получены на второй эталонной колесной оси того же типа, что и контролируемая ось, но содержащей известные дефекты, для того, чтобы запомнить только те данные, которые характерны для показаний отраженных сигналов, характерных для известных дефектов, присутствующих во вторых эталонных картах, и сформировать, таким образом, карты дефектов;
- предлагаемый способ может содержать этап i), на котором сравнивают амплитуды данных из карт, которые были получены в процессе этапа d) или g), с выбранной пороговой амплитудой для того, чтобы запомнить только те данные, которые характерны для показаний отраженных сигналов, амплитуды которых превышают упомянутую пороговую амплитуду и которые, следовательно, сигнализируют о наличии дефектов, и сформировать, таким образом, карты дефектов;
- в случае выявления амплитуды, превышающей пороговую амплитуду, можно, в случае необходимости, генерировать предупреждающий сигнал;
- предлагаемый способ может содержать этап j), состоящий в отображении по меньшей мере одной карты на экране;
- можно, например, использовать зонды, способные излучать ультразвук вдоль одного единственного направления с изменяемым углом ;
- например, угол может изменяться между примерно 0° и примерно 70° по отношению к продольному или поперечному направлению;
- в качестве варианта реализации можно, например, использовать так называемые измерительные зонды с фазированной решеткой (или "phased array"), способные излучать ультразвук вдоль направлений, которые заключены в выбранном угловом секторе;
- например, упомянутый угловой сектор может быть заключен между примерно 0° и примерно 70° по отношению к продольному или поперечному направлению.
Здесь следует отметить, что этапы с а) по d) должны осуществляться в этом порядке, но что другие упомянутые выше этапы с е) по j) не обязательно должны выполняться в этом порядке. В частности, этап j) может быть осуществлен непосредственно после этапа d).
В данном изобретении также предлагается устройство контроля колесных осей, предназначенное для осуществления представленного в предшествующем изложении способа. Это устройство, говоря более конкретно, имеет в своем составе:
- контрольный стенд, выполненный с возможностью приема трубчатой колесной оси, содержащей стенку, которая имеет профили с переменными и известными наружным и внутренним радиусами;
- по меньшей мере один ультразвуковой зонд, выполненный с возможностью анализа по меньшей мере одного выбранного участка этой стенки в выбранном угловом секторе и получения, таким образом, данных анализа;
- средства контроля, выполненные с возможностью управления контрольным стендом таким образом, чтобы размещать каждый зонд на наружной или внутренней поверхности стенки в первом месте, которое выбирается в зависимости от ее профилей, и возможного загромождения данной оси, таким образом, чтобы упомянутый зонд анализировал по меньшей мере один первый выбранный участок и по меньшей мере один второй выбранный участок стенки соответственно в по меньшей мере одном первом и в по меньшей мере одном втором выбранных угловых секторах, ориентированных вдоль первого и второго продольных или поперечных противоположных направлений, и чтобы он получал, таким образом, данные анализа для различных относительных угловых положений оси по отношению к нему;
- средства обработки, выполненные с возможностью формирования, на основе полученных данных анализа, карт, представляющих продольные или поперечные ориентации и продольные и поперечные положения показаний отраженных сигналов внутри стенки.
Это устройство в соответствии с предлагаемым изобретением может иметь множество вариантов реализации, в которых могут быть скомбинированы между собой по меньшей мере некоторые из приведенных ниже признаков:
- его средства контроля могут быть выполнены с возможностью контроля, первый раз, относительного перемещения каждого зонда по отношению к наружной поверхности стенки для того, чтобы он получил данные анализа для различных относительных угловых положений оси по отношению к нему, с последующим контролем, второй раз, относительного перемещения по меньшей мере одного зонда по отношению к внутренней поверхности стенки для того, чтобы анализировать по меньшей мере один выбранный третий участок стенки в по меньшей мере одном третьем угловом секторе, ориентированном вдоль выбранного продольного или поперечного направления, и для получения, таким образом, других данных анализа для различных относительных угловых положений оси по отношению к этому измерительному зонду. В этом случае средства обработки выполнены с возможностью формированиия, на основе полученных данных анализа, карт, представляющих положения и ориентации показаний отраженных сигналов внутри стенки;
- средства контроля этого устройства могут быть выполнены с возможностью i) контроля, по меньшей мере, первый раз, относительного перемещения каждого зонда по отношению к наружной или внутренней поверхности стенки для того, чтобы он осуществлял ультразвуковой анализ в угловом секторе, ориентированном вдоль продольного направления, и для того, чтобы он получал данные анализа, на основе которых средства обработки сформируют карты, характерные для поперечных ориентаций и положений показаний отраженных сигналов, затем ii) контроля, по меньшей мере, второй раз, относительного перемещения каждого измерительного зонда по отношению к наружной или внутренней поверхности стенки для того, чтобы он осуществлял ультразвуковой анализ в угловом секторе, ориентированном вдоль поперечного направления, и чтобы он получал данные анализа, на основе которых средства обработки сформируют карты, характерные для продольных ориентаций и положений показаний отраженных сигналов;
- это устройство может иметь в своем составе средства анализа поверхности, выполненные с возможностью анализа по меньшей мере наружной поверхности стенки при помощи другой технологии анализа, отличной от технологии, основанной на использовании ультразвука, для того, чтобы получить данные анализа для различных относительных положений оси по отношению к зонду. В этом случае средства обработки могут, в случае необходимости, быть выполнены с возможностью формирования, на основе этих данных анализа (полученных при помощи средств анализа поверхности), карт, представляющих положения и ориентации показаний поверхности данной стенки;
- например, упомянутые средства анализа поверхности выбираются среди средств анализа при помощи потока утечки и средств анализа при помощи токов Фуко;
- это устройство может иметь в своем составе средства перемещения, выполненные с возможностью обеспечения относительного перемещения в продольном направлении по меньшей мере одного зонда по отношению к оси. В этом случае средства контроля данного устройства выполнены с возможностью контроля упомянутых средств перемещения для того, чтобы они перемещали продольно и относительно по меньшей мере один зонд по отношению к оси для того, чтобы он анализировал часть, по меньшей мере, первых, вторых и возможных третьих участков стенки;
- в качестве варианта реализации, или в дополнение к нему, средства контроля этого устройства могут быть выполнены с возможностью осуществления электронного сканирования с использованием по меньшей мере одного зонда для того, чтобы он анализировал часть, по меньшей мере, первых, вторых и возможных третьих участков стенки;
- стенд этого устройства может быть выполнен с возможностью приведения во вращение оси по отношению к каждому зонду для того, чтобы определить различные относительные угловые положения этой оси по отношению к зонду. В качестве варианта реализации, упомянутый стенд может быть выполнен с возможностью приведения во вращение по меньшей мере одного зонда по отношению к оси для того, чтобы определить различные относительные угловые положения этой оси по отношению к упомянутому зонду;
- средства обработки предлагаемого устройства могут быть выполнены с возможностью сравнения данных из карт, полученных на подлежащей контролю оси, с данными из первых эталонных карт, которые были получены на первой эталонной колесной оси того же типа, что и контролируемая ось, но лишенной дефектов, и запоминания только тех данных, которые являются характерными для показаний отраженных сигналов, которые не были представлены в первых эталонных картах, и формирования, таким образом, скорректированных карт;
- средства обработки этого устройства могут быть выполнены с возможностью сравнения данных из карт, полученных на подлежащей контролю оси, с данными вторых эталонных карт, полученных на второй эталонной оси того же типа, что и контролируемая ось, но содержащей известные дефекты, и запоминания только данных, характерных для показаний отраженных сигналов, характерных для известных дефектов, присутствующих в упомянутых вторых эталонных картах, и формирования, таким образом, карт дефектов;
- средства обработки предлагаемого устройства могут быть выполнены с возможностью сравнения амплитуд данных из карт, полученных на подлежащей контролю колесной оси, с выбранной пороговой амплитудой и запоминания только данных, характерных для показаний отраженных сигналов, амплитуды которых превышают эту пороговую амплитуду и сигнализируют о наличии дефектов, а также формирования, таким образом, карт дефектов;
- средства обработки предлагаемого устройства могут быть выполнены с возможностью генерирования предупреждающего сигнала в случае выявления амплитуды, превышающей упомянутую пороговую амплитуду;
- предлагаемое устройство может иметь в своем составе экран, способный отображать, по меньшей мере, некоторые из карт, которые были сформированы при помощи средств обработки данного устройства;
- каждый зонд может, например, быть выполнен с возможностью излучения ультразвука вдоль одного единственного направления с изменяемым углом, например, между примерно 0° и примерно 70°, по отношению к продольному или к поперечному направлению;
- в качестве варианта реализации, каждый зонд может представлять собой, например, так называемый зонд с фазированной решеткой и может обеспечивать излучение ультразвука вдоль направлений, заключенных в выбранном угловом секторе, например, заключенном между примерно 0° и примерно 70° по отношению к продольному или поперечному направлению.
Другие характеристики и преимущества предлагаемого изобретения будут лучше поняты из приведенного ниже описания примеров его реализации, где даются ссылки на приведенные в приложении чертежи, среди которых:
- Фиг.1 представляет собой схематический вид в продольном разрезе, иллюстрирующий пример трубчатой колесной оси, не содержащей оборудования;
- Фиг.2 представляет собой схематический вид в продольном разрезе, иллюстрирующий часть примера трубчатой колесной оси, снабженной оборудованием;
- Фиг.3 схематически и функционально иллюстрирует пример реализации устройства контроля в соответствии с предлагаемым изобретением;
- Фиг.4А и 4В схематично представляют два примера размещения зонда в двух различных выбранных местах наружной поверхности части стенки оси (в перспективном виде) для осуществления продольного анализа;
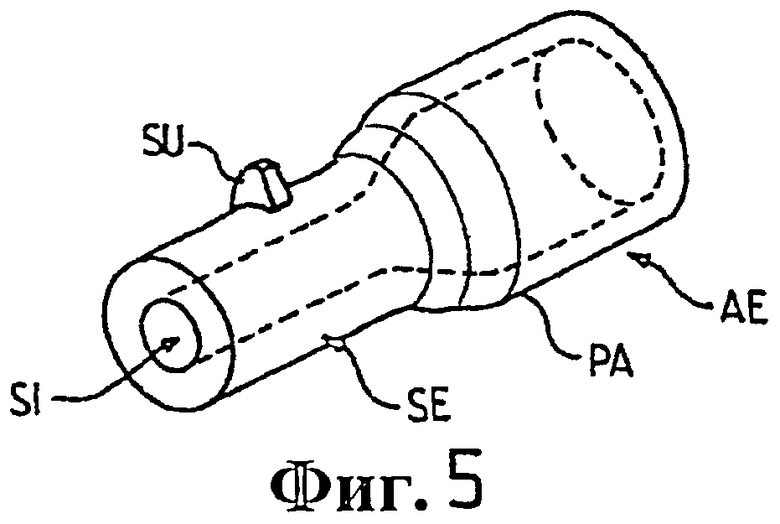
- Фиг.5 схематично представляет пример размещения зонда на выбранном месте наружной поверхности части стенки оси (в перспективном представлении) с целью выполнения поперечного анализа;
- Фиг.6 схематично представляет пример размещения зонда на выбранном месте внутренней поверхности части стенки оси (в перспективном представлении) с целью выполнения продольного анализа;
- Фиг. с 7А по 7С представляют первые участки части стенки, покрытые тремя однонаправленными зондами, смещаемыми продольно справа налево для углов излучения, соответственно равных 30°, 45° и 60° и ориентированных вдоль первого продольного направления;
- Фиг. с 8А по 8С иллюстрируют вторые участки части стенки, показанные на Фиг. с 7А по 7С, покрытые тремя такими же однонаправленными зондами, смещаемыми продольно слева направо для углов излучения, соответственно равных 30°, 45° и 60° и ориентированных вдоль второго продольного направления;
- Фиг.9А и 9В иллюстрируют первые и вторые участки части стенки, показанные на Фиг. с 7А по 7С, покрытые тремя зондами с фазированной решеткой для угловых секторов, заключенных между 30° и 70° и ориентированных соответственно вдоль первого и второго продольных направлений;
- Фиг.10 иллюстрирует третий участок части стенки, покрытой одним зондом с фазированной решеткой, размещенным на внутренней поверхности, для углового сектора, заключенного между 30° и 70° и ориентированного вдоль продольного направления;
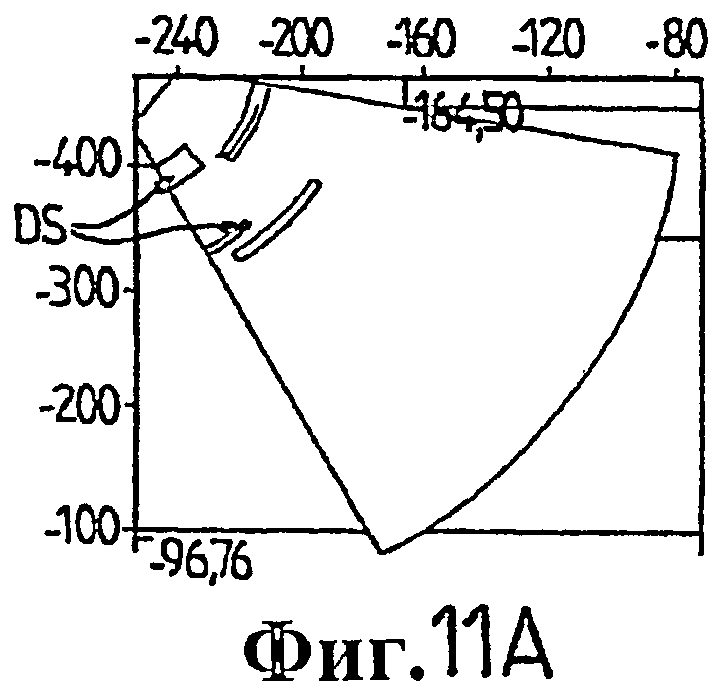
- Фиг.11А и 11В иллюстрируют два примера карт, полученных на одной и той же стенке колесной оси.
Приведенные в приложении чертежи могут быть использованы не только для дополнения описания предлагаемого изобретения, но также могут, в случае необходимости, содействовать определению этого изобретения.
Техническая задача предлагаемого изобретения состоит в том, чтобы обеспечить возможность выполнения по меньшей мере полуавтоматическим образом неразрушающего контроля большей части и даже всей трубчатой колесной оси, если это возможно, причем и в том случае, когда эта ось снабжена оборудованием.
В последующем изложении подразумевается, что подлежащие контролю трубчатые оси представляют собой колесные оси для товарных или пассажирских железнодорожных вагонов. Однако предлагаемое изобретение не ограничивается этим типом применения. По существу, это изобретение касается любого изделия в виде полого (трубчатого) тела вращения, подвергающегося в процессе эксплуатации воздействию механических напряжений, в частности усталостных напряжений, и стенка которого содержит профили с переменными и известными наружным и внутренним радиусами.
Как это представлено на фиг.1, трубчатая (колесная) ось АЕ содержит стенку РА, которая определена посредством выполнения операции горячей ковки и механической обработки и которая в конечном счете представляет профили с переменными наружным R1 и внутренним R2 радиусами. Здесь следует отметить, что толщина этой стенки в радиальном направлении (то есть вдоль направления, перпендикулярного по отношению к продольной оси ХХ) не обязательно является постоянной. Говоря другими словами, профили с наружным R1 и внутренним R2 радиусами не обязательно поддаются наложению с точностью до гомотетии.
Автоматический контроль оси этого типа, лишена ли она дополнительного оборудования, как это показано в примере, проиллюстрированном на фиг.1, или снабжена этим дополнительным оборудованием EQ (таким, в частности, как колеса и/или тормозные диски), как это показано в примере, проиллюстрированном на фиг.2, осуществляется при помощи устройства контроля типа того, которое схематически и функционально проиллюстрировано на фиг.3.
Такое устройство имеет в своем составе по меньшей мере один контрольный стенд ВС, по меньшей мере один ультразвуковой зонд SU (здесь представлены три таких зонда), модуль контроля МС и модуль обработки МТ, а также, предпочтительным образом, экран ЕС. Здесь следует отметить, что модуль контроля МС, модуль обработки МТ и экран ЕС могут представлять собой часть микрокомпьютера (или часть рабочей станции) МО, соединенного с контрольным стендом ВС и с каждым зондом SU, как это проиллюстрировано в качестве не являющегося ограничительным примера на фиг.3. В последующем изложении предполагается, что предлагаемое устройство имеет в своем составе по меньшей мере два зонда SU.
Контрольный стенд ВС имеет в своем составе, например, опоры MS, на которых может быть установлена колесная ось АЕ (вместе со своим оборудованием или без него), и приводные валы АВ, предназначенные для приведения этой колесной оси во вращение в соответствии с выбранными угловыми участками в случае приема инструкций, выдаваемых из модуля МС контроля. Здесь следует отметить, что выбранный угловой участок в случае необходимости может быть равным 360°, что соответствует полному обороту. Здесь также следует отметить, что можно обойтись без опор MS, так как приводные валы АВ сами имеют возможность также и удерживать колесную ось АЕ. Разумеется, может быть рассмотрено и любое другое средство, обеспечивающее возможность приведения колесной оси АЕ во вращение. Здесь важно отметить, что в данном случае существенно лишь то обстоятельство, что стенд ВС может быть выполнен с возможностью либо приведения колесной оси АЕ во вращение по отношению к зондам SU с целью определения различных относительных угловых положений этой колесной оси АЕ по отношению к зондам SU, либо приведения этих зондов SU во вращение по отношению к колесной оси АЕ с целью определения различных относительных угловых положений этой колесной оси АЕ по отношению к зондам SU. Говоря другими словами, стенд ВС контролирует относительное позиционирование колесной оси АЕ по отношению к зондам SU. В последующем изложении, в качестве не являющегося ограничительным примера, считается, что стенд ВС имеет возможность приводить во вращение ось АЕ по отношению к зондам SU.
Ультразвуковые зонды SU могут быть выполнены либо с возможностью излучения ультразвука вдоль одного единственного направления, угол которого выбирается и может быть изменен в зависимости от конкретных потребностей, либо они могут представлять собой так называемые зонды с фазированной решеткой (или "phased array"), то есть выполненные таким образом, чтобы излучать ультразвук вдоль множества направлений, заключенных в угловом секторе, выбираемом в зависимости от конкретных потребностей (при помощи электронного углового сканирования). Можно также обеспечить эквивалент продольного перемещения датчика посредством электронного сканирования.
В первом случае (однонаправленном) каждый зонд SU содержит один единственный элемент детектирования, выполненный с возможностью приема отраженных сигналов, поступающих из стенки РА, являющейся объектом анализа. Во втором случае (зонд с фазированной решеткой) каждый зонд SU содержит несколько элементов детектирования, выполненных с возможностью приема отраженных сигналов, поступающих из стенки РА, являющейся объектом анализа, после преломления и/или отражения (в некоторых случаях многочисленного) под различными углами. Здесь следует напомнить, что элементы детектирования обычно изготавливаются из композитного материала и устанавливаются на преобразователях. Когда элементы детектирования зонда возбуждены, они производят расходящийся пучок излучения для анализа. Форма этого пучка и его общее направление падения могут быть изменены электронным образом путем введения задержек по времени на уровне моментов возбуждения выбранных элементов детектирования зонда. Обычно называют "виртуальным зондом" комбинацию элементов детектирования зонда и возможных связанных с ними задержек по времени, которые используются для производства пучка анализа в общем заданном направлении. Таким образом, зонд с фазированной решеткой имеет возможность формировать несколько (например, несколько десятков) виртуальных зондов в зависимости от комбинаций, объектом которых он является. Частота возбуждения преобразователей обычно имеет величину порядка нескольких мегагерц (например, от 2 МГц до 5 МГц). В том случае, когда эти преобразователи не возбуждены для излучения, эти же элементы детектирования служат для детектирования отраженных сигналов, поступающих от поверхностей раздела между материалом и воздухом или материалом и жидкостью, а также от недостатков и дефектов. Таким образом, эти элементы детектирования образуют датчики типа передатчик/приемник.
Профили с внутренним радиусом R2 и наружным радиусом R1, которые имеет стенка РА, и возможные загромождения оси АЕ анализируются, например, посредством программного обеспечения моделирования типа CIVA 8.0 (разработанной и распространяемой на рынке Комиссариатом Атомной Энергетики (СЕА)), таким образом, чтобы определить количество зондов SU, которые будут необходимы для анализа всей или только выбранной части оси АЕ, принимая во внимание используемый тип этих зондов (однонаправленный или с фазированной решеткой (и в этом втором случае с учетом количества элементов детектирования)) и с учетом того, что они могут быть ориентированы таким образом, чтобы осуществлять продольный анализ или поперечный анализ вдоль первого и второго противоположных направлений.
Здесь под выражением "продольный анализ" следует понимать анализ, осуществляемый с целью поиска дефектов и/или недостатков, ориентированных предпочтительным образом в продольном направлении или под небольшим острым углом к этому продольному направлению ХХ (острый угол обычно меньше ±25° и предпочтительным образом меньше ±5°). Иногда используют термин "наклонное положение" для того, чтобы обозначить такую ориентацию дефекта. Этот анализ осуществляется посредством пучка, излучаемого вдоль направления, перпендикулярного по отношению к продольному направлению ХХ, то есть общее направление которого по существу располагается в плоскости, перпендикулярной к продольному направлению ХХ или составляет небольшой острый угол (обычно менее ±10°) по отношению к этому перпендикулярному направлению.
В то же время, здесь под выражением "поперечный анализ" следует понимать анализ, осуществляемый с целью поиска дефектов и/или недостатков, ориентированных предпочтительным образом в поперечном направлении или под небольшим острым углом по отношению к плоскости, перпендикулярной к продольному направлению ХХ (этот острый угол обычно меньше ±25° и предпочтительным образом меньше ±5°). Иногда используют термин "наклонное положение" для того, чтобы обозначить такую ориентацию дефекта. Этот анализ осуществляется посредством пучка, излучаемого вдоль направления, параллельного по отношению к продольному направлению ХХ, то есть общее направления которого по существу располагается в плоскости, которая сама содержит продольное направление ХХ или составляет небольшой острый угол (обычно менее ±10°) с этим продольным направлением.
Принимая во внимание формы профилей с внутренним R2 и наружным R1 радиусами, которые обычно имеет стенка РА осей АЕ, и обычное загромождение этих осей, угол излучения однонаправленного зонда SU обычно должен иметь возможность изменяться между примерно 0° и примерно 70° по отношению к продольной оси ХХ, и угловой сектор излучения зонда SU с фазированной решеткой обычно должен быть заключен между примерно 0° и примерно 70° по отношению к продольной оси ХХ.
После того как для каждого зонда SU определено выбранное (первое) место расположения, где этот зонд должен быть первоначально размещен по отношению к оси АЕ таким образом, чтобы анализировать первый выбранный участок стенки РА в первом выбранном угловом секторе, ориентированном вдоль первого продольного или поперечного направления, а также возможное выбранное (второе) место, где этот зонд должен быть впоследствии размещен относительно оси АЕ таким образом, чтобы анализировать второй выбранный участок стенки РА во втором выбранном угловом секторе, ориентированном вдоль второго продольного или поперечного направления, противоположного первому направлению, можно разместить зонды SU в их первых соответствующих выбранных местах.
Это относительное размещение зондов SU по отношению к оси АЕ может осуществляться в первых выбранных местах, которые располагаются либо на наружной поверхности SE стенки РА, либо на внутренней поверхности SI этой стенки РА, в зависимости от реальных потребностей (и конфигурации данной оси АЕ). Можно, например, начать с выполнения ультразвукового анализа, размещая зонды SU на наружной поверхности SE стенки РА, дополняя, затем, этот анализ, в случае необходимости, путем размещения зондов SU на внутренней поверхности SI стенки РА (то есть внутри трубчатой оси АЕ). Однако вариант действий в обратном порядке также возможен.
Соединение между зондами SU и внутренней поверхностью SI или наружной поверхностью SE стенки РА может осуществляться при помощи любого средства, известного специалисту в данной области техники, в частности, при помощи глицерина или посредством погружения в воду, предпочтительным образом смешанную с противокоррозионным продуктом.
На Фиг.4А и 4В представлены два примера относительного размещения зонда SU в двух выбранных местах наружной поверхности SE части стенки РА оси АЕ с целью выполнения продольного анализа. На фиг.5 также представлен пример относительного размещения зонда SU в выбранном месте наружной поверхности SE части стенки РА оси АЕ с целью выполнения поперечного анализа. На фиг.6 также представлен пример относительного размещения зонда SU в выбранном месте внутренней поверхности SI части стенки РА оси АЕ с целью выполнения продольного анализа.
Здесь важно отметить, что зонд SU имеет возможность анализировать участок, который был для него предназначен, либо оставаясь на уровне выбранного места, либо перемещаясь относительно и в продольном направлении и/или в поперечном направлении между исходным положением (соответствующим первоначально выбранному месту) и конечным положением (соответствующим другому выбранному месту), в случае необходимости, через одно или несколько промежуточных положений (каждое из которых соответствует другому выбранному месту).
Эти относительные перемещения зонда(ов) SU могут быть осуществлены при помощи средств MD перемещения, которые связаны с этими зондами. При этом каждое средство MD перемещения представляет собой, например, держатель зонда, установленный с возможностью поступательного перемещения по отношению к стенду ВС таким образом, чтобы иметь возможность быть перемещенным в продольном направлении в зависимости от инструкций, выдаваемых модулем МС контроля. Здесь следует отметить, что каждый держатель MD зонда в случае необходимости может быть приведен во вращение таким образом, чтобы изменить ориентацию своего зонда SU либо на угол 180° так, чтобы этот зонд имел возможность перейти от продольного или поперечного анализа (общее направление излучения, перпендикулярное по отношению к продольному направлению ХХ) в первом выбранном угловом секторе, ориентированном вдоль первого продольного или поперечного направления, к продольному или поперечному анализу во втором выбранном угловом секторе, ориентированном вдоль второго продольного или поперечного направления, противоположного первому направлению, либо на угол 90° таким образом, чтобы этот зонд имел возможность перейти от продольного анализа в первом и втором выбранных угловых секторах к поперечному анализу в третьем выбранном угловом секторе, и наоборот. Можно также рассматривать осуществление анализа, являющегося результатом комбинированного продольного и поперечного перемещения.
Здесь следует отметить, что зонды SU могут быть неподвижно зафиксированы, тогда как стенд ВС может перемещать в продольном направлении ось АЕ и/или может приводить ее во вращение. Также имеется возможность перемещать зонды SU продольно по отношению к оси АЕ и приводить последнюю во вращение, или наоборот.
В качестве варианта реализации модуль МС контроля может обеспечивать осуществление электронного сканирования с использованием по меньшей мере некоторых зондов SU для того, чтобы они анализировали часть по меньшей мере первых, вторых и возможных третьих участков стенки РА. Здесь следует напомнить, что электронное сканирование обеспечивается для зонда SU путем использования некоторых из этих элементов детектирования, располагающихся в выбранных местах его фазированной решетки, и присвоения этим выбранным элементам детектирования выбранных задержек по времени таким образом, чтобы они излучали последовательно. Этот "электронный" способ перемещения является предпочтительным, поскольку он позволяет отказаться от механического перемещения зонда SU.
Здесь следует отметить, что может быть также рассмотрено сочетание одновременного перемещения в продольном направлении (механического) и электронного сканирования для того, чтобы обеспечить, по меньшей мере для некоторых зондов SU, возможность анализа участка стенки, который был для них предназначен. В этом случае именно модуль МС контроля может обеспечивать создание инструкций, необходимых для средств MD перемещения для обеспечения относительных и продольных перемещений выбранных зондов SU, и инструкций, необходимых для выбранных зондов SU, чтобы вызвать электронное сканирование.
Также следует отметить, что техническое решение, используемое для анализа любого выбранного участка стенки РА, зависит от типа имеющегося зонда SU и, кроме того, в случае зондов с фазированной решеткой, от количества элементов детектирования, которые их образуют. Действительно, понятно, что если количество элементов детектирования зонда SU адаптировано для покрытия участка стенки РА, который назначен этому зонду, бесполезно предусматривать механическое перемещение в продольном направлении, поскольку его можно заменить электронным сканированием. В качестве примера можно сказать, что если зонд SU должен покрывать участок стенки РА, имеющий продольную протяженность, равную 100 мм, этот зонд должен содержать по меньшей мере 200 элементов детектирования размером 0,5 мм, попарно отделенных друг от друга, например, расстоянием, составляющим примерно 0,1 мм. Здесь следует напомнить, что чем меньше размеры элементов детектирования, тем более широкими могут быть угловые секторы анализа. Может быть найден компромисс между количеством элементов детектирования зондов SU и возможностями расширения покрытия, обеспечиваемого при помощи электронного сканирования, таким образом, чтобы исключить механические продольные перемещения.
Здесь также следует отметить, что использование зондов с фазированной решеткой является более предпочтительным, чем использование однонаправленных зондов, поскольку зонды с фазированной решеткой позволяют обеспечить лучшую непрерывность анализа в одном и том же угловом секторе, исключая всякое угловое перемещение ультразвукового источника.
В соответствии с предлагаемым изобретением после того, как измерительные зонды были размещены на наружной поверхности SE или на внутренней поверхности SI стенки РА в первых местах (выбранных в зависимости от ее профилей и возможного загромождения оси АЕ), каждый из этих зондов SU приступает к анализу первого участка стенки РА, который был для него предназначен, в первом выбранном угловом секторе, который ориентирован вдоль первого продольного или поперечного направления. Каждый зонд SU может, таким образом, получать данные анализа для текущего относительного положения оси АЕ по отношению к упомянутому зонду SU. Приводя ось АЕ во вращение на последовательно расположенных выбранных угловых секторах (здесь посредством контрольного стенда ВС и, например, при помощи его приводных валов АВ), каждый зонд SU может осуществлять новое получение данных анализа после каждого углового перемещения. Таким образом, можно располагать данными анализа, относящимися ко всей совокупности окружности каждого первого участка контролируемой стенки РА.
Эти данные анализа содержат, например, углы излучения, моменты излучения и приема ультразвука (или то, что эквивалентно временным интервалам между моментами излучения и приема), и углы приема. Они передаются зондами SU, например, в модуль МС контроля, который предназначен для хранения этих данных в запоминающем устройстве МУ в соответствии с продольными и угловыми положениями первых контролируемых участков по отношению к выбранной системе координат, а также, в случае необходимости, идентификатор зонда SU, использованного для получения упомянутых данных.
Затем по меньшей мере некоторые из зондов SU снова размещаются (относительно) на наружной поверхности SE или на внутренней поверхности SI стенки РА во вторые места (выбранные в зависимости от профилей этой стенки и возможного загромождения оси АЕ), для того, чтобы они приступили к анализу вторых участков стенки РА, которые соответственно были для них предназначены, во вторых выбранных угловых секторах, которые ориентированы вдоль второго продольного или поперечного направления, противоположного первому направлению.
Например, если первое направление соответствует направлению, проходящему слева направо вдоль продольной оси ХХ, то второе направление соответствует направлению, проходящему справа налево вдоль этой продольной оси ХХ. Таким же образом, если первое направление соответствует направлению, проходящему слева направо вдоль второй оси, перпендикулярной к продольной оси ХХ, то второе направление соответствует направлению, проходящему справа налево вдоль этой второй оси.
Каждый снова размещенный зонд SU может, таким образом, получать данные анализа для текущего углового положения оси АЕ. Приводя эту ось АЕ во вращение в выбранных угловых секторах, каждый зонд SU может осуществлять новое получение данных анализа после каждого углового перемещения. Таким образом, можно располагать данными анализа, относящимися ко всей совокупности окружности каждого второго участка контролируемой стенки РА. Эти данные анализа передаются зондами SU, например, в модуль МС контроля, который предназначен для хранения этих данных в запоминающем устройстве в соответствии с продольными и угловыми положениями вторых контролируемых участков по отношению к выбранной системе координат, а также, в случае необходимости, идентификатор зонда SU, использованного для получения упомянутых данных.
Благодаря этому двойному анализу вдоль противоположных направлений, можно проконтролировать всю или часть колесной оси АЕ (в зависимости от конкретных потребностей), как это схематически проиллюстрировано на Фиг. с 7 по 10. Говоря более конкретно:
- на Фиг. с 7А по 7С представлены первые участки части стенки, которые могут быть покрыты тремя однонаправленными измерительными зондами, размещенными на наружной поверхности SE и перемещаемыми относительно и продольно справа налево, для углов излучения, составляющих соответственно 30°, 45° и 60° и ориентированных вдоль первого продольного направления (проходящего справа налево);
- на Фиг. с 8А по 8С представлены вторые участки той же самой части стенки, которые могут быть покрыты тремя теми же самыми однонаправленными зондами, размещенными на наружной поверхности SE и перемещаемыми относительно и продольно слева направо, для углов излучения, составляющих соответственно 30°, 45° и 60° и ориентированных вдоль второго продольного направления (проходящего слева направо);
- на фиг.9А представлены первые участки той же самой части стенки, которые могут быть покрыты тремя зондами с фазированной решеткой, размещенными на наружной поверхности SE, для углового сектора, заключенного между 30° и 70° и ориентированного вдоль первого продольного направления (проходящего справа налево);
- на фиг.9В представлены вторые участки той же самой части стенки, которые могут быть покрыты тремя зондами с фазированной решеткой, размещенными на наружной поверхности SE, для углового сектора, заключенного между 30° и 70° и ориентированного вдоль второго продольного направления (проходящего слева направо);
- на фиг.10 представлены третьи участки той же самой части стенки, которые могут быть покрыты одним зондом с фазированной решеткой, размещенным на внутренней поверхности SI, для углового сектора, заключенного между 30° и 70° и ориентированного вдоль продольного направления (проходящего слева направо).
Принимая во внимание формы профилей с внутренним R2 и наружным R1 радиусами, которые обычно имеет стенка РА осей АЕ, и обычное загромождение этих осей, угол излучения однонаправленного зонда SU обычно должен иметь возможность изменяться между примерно 0° и примерно 70° по отношению к продольному направлению ХХ или к поперечному направлению, и угловой сектор излучения зонда SU с фазированной решеткой обычно должен быть заключен между примерно 0° и примерно 70° по отношению к продольному направлению ХХ или к поперечному направлению.
В примерах реализации, представленных на Фиг. с 7 по 10, каждая двунаправленная стрелка демонстрирует продольную протяженность (первого) участка, анализируемого одним зондом SU (размещенным сверху). Должно быть понятно, что загромождение колесной оси АЕ в определенных ее частях существенно снижает продольные протяженности участков, которые могут быть технически проанализированы (то есть покрыты) одним и тем же зондом SU. Это, в частности, относится к частям, которые располагаются под колесами и которые имеют более высокую вероятность содержания структурных дефектов, вызванных насаживанием на эту ось колес с натягом и/или воздействующими нагрузками, вследствие чего эти участки должны быть объектом как можно более точного и как можно более полного контроля (анализа).
Накопленные данные анализа извлекаются модулем МТ обработки, который затем обеспечивает их группирование в зависимости от зон оси, к которым они относятся, таким образом, чтобы сформировать карты, которые представляют поперечные или продольные ориентации и положения показаний отраженных сигналов внутри стенки РА.
Здесь следует напомнить, что показания отраженных сигналов являются результатом отражения либо на поверхности раздела материала с воздухом или материала с жидкостью, либо на недостатке, либо на дефекте.
Также следует напомнить, что продольные анализы более специфическим образом адаптированы для выявления поперечных недостатков и дефектов (которые обычно встречаются наиболее часто), тогда как поперечные анализы более специфическим образом адаптированы для выявления продольных недостатков и дефектов.
Факт контроля материалов вдоль двух противоположных направлений и, следовательно, вдоль весьма различных направлений анализа позволяет выявлять недостатки и дефекты меньших размеров и, следовательно, выявлять большее количество таких недостатков и дефектов, чем при использовании способов и устройств контроля, известных из существующего уровня техники и адаптированных к сплошным (или массивным) осям. Но это позволяет также обеспечить удовлетворительное выявление косых или наклонных недостатков и дефектов (или "tiltes") внутри стенки РА.
Здесь следует отметить, что модуль МТ обработки в случае необходимости может быть выполнен таким образом, чтобы осуществлять "корреляции" между данными анализа, относящимися к идентичным зонам, образующим зоны перекрытия первого (первых) и/или второго (вторых) участков стенки. Они могут, таким образом, сформировать так называемые "необработанные" карты этих зон перекрытия, в случае необходимости трехмерного типа (3D).
Файлы данных, формирующих необработанные карты, предпочтительным образом хранятся в запоминающем устройстве МУ. При этом эти карты могут либо отображаться индивидуальным образом (одни за другими) или групповым образом (несколько карт одновременно) на экране ЕС с целью их анализа специалистом, либо быть сначала проанализированы автоматизированным образом, а затем преобразованы в "скорректированные" карты или карты "дефектов", которые могут быть отображены на экране ЕС индивидуальным образом или групповым образом.
На "необработанных" картах могут быть выполнены несколько типов сравнительного анализа.
Так, например, модуль МТ обработки может обеспечивать сравнение данных из по меньшей мере некоторых карт, которые были получены на подлежащей контролю оси АЕ, с данными из первых эталонных карт, которые были получены на первой эталонной оси того же типа, что и контролируемая ось, но лишенной дефектов. В этом случае модуль МТ обработки запоминает только те данные, которые являются характерными для показаний отраженных сигналов, не присутствующих в упомянутых первых эталонных картах, для того, чтобы сформировать скорректированные карты, которые этот модуль хранит в запоминающем устройстве МУ.
В качестве варианта реализации, или дополнительно, модуль МТ обработки может обеспечивать сравнение данных из по меньшей мере некоторых карт (необработанных или скорректированных), которые были получены на подлежащей контролю оси АЕ, с данными из вторых эталонных карт, которые были получены на второй эталонной оси того же типа, что и контролируемая ось, но содержащей известные дефекты. В этом случае модуль МТ обработки запоминает только те данные, которые являются характерными для показаний отраженных сигналов, характерных для известных дефектов, присутствующих в упомянутых вторых эталонных картах, для того, чтобы сформировать карты дефектов, которые этот модуль хранит в запоминающем устройстве МУ.
В качестве варианта реализации, или дополнительно, модуль МТ обработки может обеспечивать сравнение амплитуд показаний отраженных сигналов, представленных на по меньшей мере некоторых из карт, с выбранной пороговой амплитудой. В этом случае модуль МТ обработки запоминает только те данные, которые являются характерными для показаний отраженных сигналов, амплитуды которых превышают выбранную пороговую амплитуду и которые вследствие этого предполагаются исходящими от дефектов, для того, чтобы сформировать карты дефектов.
В то же время, можно также предусмотреть, чтобы модуль МТ обработки генерировал предупреждающий сигнал (звуковой или визуальный (то есть отображаемый на экране ЕС)) всякий раз, когда он обнаруживает, что амплитуда превышает выбранную пороговую амплитуду.
На Фиг.11А и 11В представлены два примера необработанных карт, полученных на одной и той же стенке РА колесной оси АЕ. Выявленные структурные дефекты обозначены позициями DS.
Как уже было сказано в предшествующем изложении, можно анализировать стенку РА, перемещая зонды SU на наружной поверхности SE или на внутренней поверхности SI. Однако, может также быть рассмотрено осуществление двойного анализа, например, начиная с размещения зондов SU на наружной поверхности SE стенки, а затем размещая некоторые из этих зондов SU на внутренней поверхности SI стенки. Говоря более конкретно, в этом случае размещают зонды SU на наружной поверхности SE стенки РА в первых выбранных местах и анализируют при помощи этих зондов SU первые выбранные участки стенки РА в первых выбранных угловых секторах, ориентированных вдоль первого продольного (или поперечного) направления с тем, чтобы получить данные анализа для различных относительных угловых положений оси АЕ по отношению к зондам SU. Затем размещают по меньшей мере некоторые из зондов SU на наружной поверхности SE стенки РА во вторых выбранных местах и при помощи этих зондов SU анализируют вторые выбранные участки стенки РА во вторых выбранных угловых секторах, ориентированных вдоль второго продольного (или поперечного) направления, противоположного первому направлению, для того, чтобы получить данные анализа для различных относительных угловых положений оси АЕ по отношению к зондам SU. И, наконец, размещают по меньшей мере некоторые из зондов SU на внутренней поверхности SI стенки РА в третьих выбранных местах и осуществляют анализ с использованием этих зондов SU третьих выбранных участков стенки РА в третьих выбранных угловых секторах, ориентированных вдоль по меньшей мере одного продольного (или поперечного) направления, и даже вдоль двух противоположных направлений, для того, чтобы получить данные анализа для различных относительных угловых положений оси АЕ по отношению к зондам SU.
Модуль МТ обработки формирует, таким образом, на основе совокупности данных анализа карты, характерные для положений и ориентаций показаний отраженных сигналов внутри стенки РА.
Этот двойной анализ с наружной стороны и с внутренней стороны может обеспечить возможность покрытия всех участков подлежащей контролю стенки РА, при том, что это может оказаться невозможным посредством одного единственного анализа с наружной стороны из-за профилей этой стенки РА и/или загромождения оси АЕ.
Имеется также возможность осуществлять первый продольный анализ в двух направлениях (как об этом сказано выше) и с наружной стороны (или с внутренней стороны), а затем второй поперечный анализ в по меньшей мере одном направлении и с наружной стороны (или с внутренней стороны) таким образом, чтобы сформировать карты, характерные для поперечных ориентаций и положений показаний отраженных сигналов внутри стенки РА, и карты, характерные для продольных ориентаций и положений показаний отраженных сигналов внутри той же самой стенки РА.
Имеется также возможность осуществлять первый продольный анализ в двух направлениях и с наружной стороны, а затем второй поперечный анализ в по меньшей мере одном направлении и с внутренней стороны.
Имеется также возможность осуществлять первый поперечный анализ в двух направлениях и с внутренней стороны, а затем второй анализ в по меньшей мере одном направлении и с наружной стороны.
В общем случае могут быть рассмотрены любые сочетания продольного(ых) и поперечного(ых) анализов с внутренней стороны и с наружной стороны.
Следует отметить, что анализы с внутренней стороны могут в некоторых случаях требовать повторной расточки, по меньшей мере, концов трубчатой колесной оси АЕ с тем, чтобы обеспечить возможность размещения, по меньшей мере, одного зонда SU внутри этой оси АЕ, на внутренней поверхности ее стенки РА, а также ее возможное относительное перемещение соответствующими средствами MD перемещения.
Здесь следует отметить, что места размещения зондов SU, различные углы или различные угловые сектора анализа при помощи ультразвука каждого из зондов SU и участки стенки, назначенные различным зондам, в случае необходимости могут быть выбраны в зависимости от существующих требований. Таким образом, можно предусмотреть, что часть контроля будет осуществлена при помощи пучка, общее направление которого располагается по существу в плоскости, которая сама, в свою очередь, содержит продольное направление ХХ, и на участках стенки, представляющих попарно выбранные степени перекрытия, например, 50%, и/или что часть контроля будет осуществлена при помощи последовательных пучков, общие направления которых располагаются по существу в плоскостях, которые образуют острые углы с этим продольным направлением ХХ и которые пересекаются между 0° и +20° и между 0° и -20°. В то же время, угол наклона элементов детектирования зонда SU может быть выбран в зависимости от конкретных потребностей. В качестве не являющегося ограничительным примера может быть выбран угол 45° по отношению к продольному направлению ХХ.
Здесь также следует отметить, что, как это известно специалисту в данной области техники, коэффициент усиления каждого преобразователя должен быть объектом регулирования во время фазы калибровки, например, для того, чтобы амплитуда полученного сигнала на первом отраженном сигнале, поступающем от поверхности раздела стенки РА, соответствовала амплитуде, составляющей, например, порядка 50% от общей динамики амплитуды, используемой для карт.
В то же время, фаза калибровки предпочтительным образом содержит также первую часть, предназначенную для получения упомянутых выше эталонных карт, которые представляют результаты ультразвуковых анализов, выполненных на эталонной трубчатой колесной оси того же типа, что и колесная ось, которая должна стать объектом контроля, но в хорошем состоянии (то есть лишенной недостатков и дефектов). Эта первая часть фазы калибровки по существу позволяет заранее иметь представление об отраженных сигналах, которые порождаются геометрическими параметрами стенки РА (в частности, ее углами и, говоря в более общем смысле, теми ее зонами, в которых ее внутренний радиус R2 или ее наружный радиус R1 изменяются существенным образом) и, таким образом, дифференцировать их от тех отраженных сигналов, которые порождаются структурными недостатками или дефектами в подлежащих контролю трубчатых колесных осях АЕ.
Кроме того, фаза калибровки также может содержать вторую часть, предназначенную для получения упомянутых выше эталонных карт, которые представляют результаты ультразвуковых анализов, выполненных на эталонной трубчатой колесной оси того же типа, что колесная ось, которая должна стать объектом контроля, но при этом упомянутая эталонная колесная ось содержит характерные структурные или искусственные дефекты (такие, например, как характерные выемки или полости), определяемые в выбранных местах. Эти характерные структурные или искусственные дефекты определяются в соответствии с техническими требованиями и/или нормативными документами, которые фиксируют сортирующий порог между недостатками и дефектами. В том случае, когда амплитуда сигнала, происходящего от отраженного сигнала от естественных дефектов, оказывается меньшей, чем упомянутый сортирующий порог, считается, что имеет место недостаток. В противном случае (выше порога) считается, что имеет место дефект. Эта вторая часть фазы калибровки по существу позволяет заранее иметь представление об отраженных сигналах, которые вызываются характерными структурными или искусственными дефектами, и дает, таким образом, возможность более легко выявлять в картах, путем сравнения с сортирующим порогом, "объекты", которые вызывают отраженные сигналы (или сигнатуры) подобных типов в подлежащих контролю трубчатых колесных осях АЕ.
После того как завершен продольный и/или поперечный ультразвуковой анализ трубчатой колесной оси АЕ, имеется возможность выполнить по меньшей мере один анализ другого типа. Например, можно выполнить анализ наружной поверхности SE стенки РА для того, чтобы получить данные анализа поверхности для различных относительных положений оси АЕ по отношению к средствам анализа поверхности.
Среди технологий анализа поверхности, которые могут быть использованы в данном случае, можно упомянуть, в частности, так называемую технологию потока утечки и так называемую технологию с использованием токов Фуко. Некоторые из этих технологий являются предпочтительными вследствие того, что они позволяют получить данные анализа поверхности, на основе которых можно сформировать карты, характерные для положений и ориентаций дефектов поверхности стенки РА. Файлы данных, образующие эти карты дефектов поверхности, предпочтительным образом сохраняются в запоминающем устройстве МУ для того, чтобы упомянутые карты дефектов поверхности могли быть отображены индивидуальным образом (то есть одни за другими) или сгруппированным образом (несколько карт одновременно), в случае необходимости, с картами структурных дефектов (полученных ультразвуковыми методами), на экране ЕС с целью анализа специалистом и/или противопоставления с картами, полученными с использованием зондов SU. Это также может обеспечить возможность автоматического сравнения при помощи данного устройства карт дефектов поверхности и карт, полученных ультразвуковыми методами.
Здесь следует отметить, что можно также выполнить анализ поверхности с использованием технологии типа MPI ("Magnetic Particle Inspection", то есть контроль с использованием намагниченных частиц). При этом следует напомнить, что эта технология состоит в покрытии наружной поверхности SE стенки РА магнитными частицами и индикатором, с последующим намагничиванием подлежащей контролю стенки и наблюдением после этого визуально (то есть невооруженным глазом) под ультрафиолетовым светом неравномерностей ориентации этих магнитных частиц, то есть неравномерностей ориентации, связанных с наличием дефектов или недостатков. Недостаток этой технологии анализа поверхности заключается в том, что она не позволяет в настоящее время обеспечить получение карт дефектов поверхности и, соответственно, в том, что эта технология основывается исключительно на результатах визуального наблюдения специалистом, осуществляющим контроль оси АЕ, и требует затем визуального, а не автоматического сравнения с картами, полученными при помощи ультразвуковых методов. Таким образом, этот метод зависит от интерпретации оператора и связанных с этим обстоятельством случайностей.
Здесь также следует отметить, что все карты, о которых шла речь в предшествующем изложении, могут представлять собой карты, известные специалисту в данной области техники, в частности карты типа А-Scan, В-Scan, С-Scan, D-Scan, S-Scan (или Sector Scan). В качестве исключительно иллюстративного примера можно, например, сформировать карты типа С-Scan (которые обеспечивают представление локализации недостатка по отношению к геометрии данной детали), а также, в случае необходимости, карты типа S-Scan (которые обеспечивают получение показаний локализации в определенном объеме в фиксированном положении зонда).
Благодаря предлагаемому изобретению имеется возможность выявлять недостатки и дефекты примерно 2 мм в толщину (то есть примерно 5% от номинальной толщины стенки РА в радиальном направлении), примерно 5 мм в длину и 1 мм в ширину. В то же время, здесь могут быть выявлены продольные и поперечные недостатки и дефекты, представляющие наклон на острые углы, обычно ±25°, и предпочтительно менее ±5°. Кроме того, могут быть выявлены продольные или поперечные полости (или «flaws»), представляющие углы дезориентации (или "tilt angles"), которые могут доходить примерно до 60°.
Предлагаемое изобретение не ограничивается описанными в предшествующем изложении примерами способа и устройства контроля трубчатых колесных осей, описанных здесь только в качестве примера, но оно охватывает все варианты, которые могут быть рассмотрены специалистом в данной области техники в рамках приведенной ниже формулы предлагаемого изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И ПРИБОР ДЛЯ РУЧНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПОЛЫХ ШКВОРНЕЙ ОСИ, ОБЛАДАЮЩИХ ПРОФИЛЯМИ ПОПЕРЕЧНОГО СЕЧЕНИЯ С ПЕРЕМЕННЫМИ ВНУТРЕННИМ И ВНЕШНИМ РАДИУСАМИ | 2008 |
|
RU2453837C2 |
| СПОСОБ И УСТРОЙСТВО ЭНДОЛЮМИНАЛЬНОГО ЛЕЧЕНИЯ КРОВЕНОСНОГО СОСУДА | 2012 |
|
RU2526414C2 |
| УСТРОЙСТВО КОНТРОЛЯ И ИЗМЕРЕНИЯ ДЕФЕКТОВ СВАРНОГО ШВА ЦИЛИНДРИЧЕСКОЙ СТЕНКИ И СПОСОБ ПРИМЕНЕНИЯ ТАКОГО УСТРОЙСТВА | 2016 |
|
RU2717382C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОВЕРХНОСТНЫХ ДЕФЕКТОВ ЦИЛИНДРИЧЕСКИХ ОБЪЕКТОВ | 2006 |
|
RU2323492C2 |
| Способ определения параметров акустического зонда для контроля цементирования нефтегазовых скважин | 1980 |
|
SU890315A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1999 |
|
RU2149393C1 |
| СПОСОБ ОЦЕНКИ КАЧЕСТВА ЦЕМЕНТИРОВАНИЯ НЕФТЕГАЗОВЫХ СКВАЖИН | 2015 |
|
RU2629724C2 |
| СПЕКТРОМЕТРИЧЕСКИЙ ЗОНД ДЛЯ ОТБОРА ОБРАЗЦОВ СЫПУЧЕГО МАТЕРИАЛА И АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОТБОРА ОБРАЗЦОВ, СОДЕРЖАЩЕЕ УКАЗАННЫЙ ЗОНД | 2018 |
|
RU2751572C2 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2000 |
|
RU2156455C1 |















Использование: для автоматического неразрушающего контроля трубчатых колесных осей с профилями с переменными внутренним и наружным радиусами. Сущность: заключается в том, что размещают на контрольный стенд (ВС) трубчатую колесную ось (АЕ), содержащую стенку (РА), которая имеет профили с переменными и известными наружным и внутренним радиусами; размещают, по меньшей мере, один ультразвуковой зонд (SU) на наружной (SE) или на внутренней (SI) поверхности упомянутой стенки (РА) в первом месте, которое выбирается в зависимости от ее профилей и возможного загромождения оси (АЕ), затем анализируют с использованием каждого зонда (SU) первый выбранный участок упомянутой стенки (РА) в первом выбранном угловом секторе, ориентированном вдоль первого продольного или поперечного направления, таким образом, чтобы получить данные анализа для различных относительных угловых положений оси (АЕ) по отношению к зонду (SU); снова размещают, по меньшей мере, один зонд (SU) в по меньшей мере одно второе место, которое выбирается в зависимости от профилей стенки (РА) и возможного загромождения оси (АЕ), анализируют с использованием каждого зонда (SU) второй выбранный участок упомянутой стенки (РА) во втором выбранном угловом секторе, ориентированном вдоль второго направления, противоположного упомянутому первому направлению, таким образом, чтобы получить другие данные анализа для различных относительных угловых положений упомянутой оси (АЕ) по отношению к зонду (SU); формируют на основе упомянутых полученных данных анализа карты, характерные для поперечных или продольных ориентаций и положений показаний отраженных сигналов внутри упомянутой стенки (РА). Технический результат: обеспечение возможности с высокой точностью контролировать дефекты, появляющиеся в угловых зонах. 2 н. и 35 з.п. ф-лы, 18 ил.
1. Способ контроля колесных осей при помощи ультразвукового(ых) зонда(ов), отличающийся тем, что этот способ содержит следующие этапы, на которых:
a) размещают на контрольный стенд (ВС) трубчатую колесную ось (АЕ), содержащую стенку (РА), которая имеет профили с переменными и известными наружным и внутренним радиусами;
b) размещают, по меньшей мере, один ультразвуковой зонд (SU) на наружной (SE) или на внутренней (SI) поверхности упомянутой стенки (РА) в первом месте, которое выбирается в зависимости от ее профилей и возможного загромождения оси (АЕ), затем анализируют с использованием каждого зонда (SU) первый выбранный участок упомянутой стенки (РА) в первом выбранном угловом секторе, ориентированном вдоль первого продольного или поперечного направления, таким образом, чтобы получить данные анализа для различных относительных угловых положений оси (АЕ) по отношению к зонду (SU);
c) снова размещают, по меньшей мере, один зонд (SU) в, по меньшей мере, одно второе место, которое выбирается в зависимости от профилей стенки (РА) и возможного загромождения оси (АЕ), анализируют с использованием каждого зонда (SU) второй выбранный участок упомянутой стенки (РА) во втором выбранном угловом секторе, ориентированном вдоль второго направления, противоположного упомянутому первому направлению, таким образом, чтобы получить другие данные анализа для различных относительных угловых положений упомянутой оси (АЕ) по отношению к зонду (SU);
d) формируют на основе упомянутых полученных данных анализа карты, характерные для поперечных или продольных ориентации и положений показаний отраженных сигналов внутри упомянутой стенки (РА).
2. Способ по п.1, отличающийся тем, что осуществляют, первый раз, этапы с b) по d), размещая каждый ультразвуковой зонд (SU) на наружной поверхности (SE) стенки (РА) для того, чтобы сформировать карты, характерные для положений и ориентации показаний отраженных сигналов внутри упомянутой стенки (РА), после чего осуществляют, второй раз, по меньшей мере, этапы b) и d), размещая, по меньшей мере, один ультразвуковой зонд (SU) на внутренней поверхности (SI) стенки (РА) в, по меньшей мере, одном третьем месте, которое выбирается в зависимости от ее профилей, а затем анализируют, с использованием каждого зонда (SU), третий выбранный участок стенки (РА) в третьем выбранном угловом секторе, ориентированном вдоль, по меньшей мере, одного выбранного продольного или поперечного направления, таким образом, чтобы получить данные анализа для различных относительных угловых положений оси (АЕ) по отношению к зонду (SU) и сформировать карты, характерные для положений и ориентации показаний отраженных сигналов внутри стенки (РА).
3. Способ по одному из пп.1 и 2, отличающийся тем, что осуществляют этапы с b) по d), по меньшей мере, один раз, размещая каждый ультразвуковой зонд (SU) на наружной (SE) или внутренней (SI) поверхности стенки (РА) таким образом, чтобы выполнить ультразвуковой анализ в угловом секторе, ориентированном вдоль продольного направления, и сформировать таким образом карты, характерные для поперечных ориентации и положений показаний отраженных сигналов внутри стенки (РА), после чего снова осуществляют этапы с b) по d) еще, по меньшей мере, один раз, размещая, по меньшей мере, один ультразвуковой зонд (SU) на наружной (SE) или на внутренней (SI) поверхности стенки (РА) таким образом, чтобы выполнить ультразвуковой анализ в угловом секторе, ориентированном вдоль поперечного направления, и сформировать таким образом карты, характерные для продольных ориентации и положений показаний отраженных сигналов внутри стенки (РА).
4. Способ по п.1, отличающийся тем, что после осуществления этапа d) предусматривают этап е), на котором осуществляют анализ по меньшей мере наружной поверхности (SE) стенки (РА) посредством другой технологии анализа, отличной от технологии, основанной на ультразвуке, таким образом, чтобы получить данные анализа для различных относительных угловых положений оси (АЕ) по отношению к зонду (SU).
5. Способ по п.4, отличающийся тем, что после осуществления этапа е) осуществляют этап f), на котором на основе этих полученных данных анализа формируют карты, характерные для положений и ориентации показаний поверхности стенки (РА).
6. Способ по одному из пп.4 и 5, отличающийся тем, что упомянутую другую технологию анализа выбирают в группе, содержащей так называемую технологию потока утечки и так называемую технологию с использованием токов Фуко.
7. Способ по п.1, отличающийся тем, что анализируют каждый из первых, вторых и возможных третьих участков упомянутой стенки посредством продольного относительного перемещения, по меньшей мере, одного зонда (SU) по отношению к оси (АЕ) и/или посредством электронного сканирования с использованием, по меньшей мере, одного зонда (SU).
8. Способ по п.1, отличающийся тем, что на одном по меньшей мере из упомянутых этапов b), с) и е) получают различные относительные угловые положения оси (АЕ) по отношению к зонду (SU), приводя во вращение упомянутую ось (АЕ) по отношению к зонду (SU).
9. Способ по п.1, отличающийся тем, что на одном по меньшей мере из упомянутых этапов b), с) и е) получают различные относительные угловые положения оси (АЕ) по отношению к зонду (SU), приводя во вращение, по меньшей мере, один зонд (SU) по отношению к оси (АЕ).
10. Способ по п.1, отличающийся тем, что он содержит этап g), на котором сравнивают данные из карт, полученных в процессе этапа d), с данными из первых эталонных карт, полученных на первой эталонной оси того же типа, что и контролируемая ось, но лишенной дефектов, таким образом, чтобы запоминать только те данные, которые характерны для показаний отраженных сигналов, не присутствующих в упомянутых первых эталонных картах, и сформировать таким образом "скорректированные" карты.
11. Способ по п.1, отличающийся тем, что он содержит этап h), на котором сравнивают данные из карт, полученных в процессе этапа d) или g), с данными из вторых эталонных карт, полученных на второй эталонной оси того же типа, что и контролируемая ось, но содержащей известные дефекты, таким образом, чтобы запомнить только те данные, которые характерны для показаний отраженных сигналов, характерных для упомянутых известных дефектов, присутствующих в упомянутых вторых эталонных картах, и сформировать таким образом карты дефектов.
12. Способ по п.1, отличающийся тем, что он содержит этап i), на котором сравнивают амплитуды данных из карт, полученных в процессе этапа d) или g), с выбранной пороговой амплитудой для того, чтобы запомнить только те данные, которые характерны для показаний отраженных сигналов, амплитуды которых превышают упомянутую пороговую амплитуду и сигнализируют о наличии дефектов, и сформировать таким образом карты дефектов.
13. Способ по п.12, отличающийся тем, что в случае выявления амплитуды, превышающей упомянутую пороговую амплитуду, генерируют предупреждающий сигнал.
14. Способ по п.1, отличающийся тем, что он содержит этап j), на котором отображают, по меньшей мере, одну карту на экране (ЕС).
15. Способ по п.1, отличающийся тем, что используют зонды (SU), способные излучать ультразвук вдоль одного единственного направления с изменяемым углом.
16. Способ по п.15, отличающийся тем, что упомянутый угол изменяется между примерно 0° и примерно 70° по отношению к продольному или к поперечному направлению.
17. Способ по п.1, отличающийся тем, что используют зонды (SU) с так называемой фазированной решеткой, способные излучать ультразвук вдоль направлений, заключенных в выбранном угловом секторе.
18. Способ по п.15, отличающийся тем, что упомянутый угловой сектор заключен между примерно 0° и примерно 70° по отношению к продольному или к поперечному направлению.
19. Устройство контроля колесных осей, отличающееся тем, что оно имеет в своем составе: i) контрольный стенд (ВС), выполненный с возможностью приема трубчатой оси (АЕ), содержащей стенку (РА), которая имеет профили с переменными и известными наружным и внутренним радиусами, ii), по меньшей мере, один ультразвуковой зонд (SU), выполненный с возможностью анализа, по меньшей мере, одного выбранного участка упомянутой стенки (РА) в выбранном угловом секторе и получения таким образом данных анализа, iii) средства контроля (МС), выполненные с возможностью управления контрольным стендом (ВС) таким образом, чтобы размещать каждый зонд (SU) на наружной (SE) или на внутренней (SI) поверхности стенки (РА) в первом месте, которое выбирается в зависимости от профилей этой стенки, и возможного загромождения упомянутой оси таким образом, чтобы он анализировал, по меньшей мере, один первый и, по меньшей мере, один второй выбранные участки упомянутой стенки (РА) соответственно в, по меньшей мере, одном первом и в, по меньшей мере, одном втором выбранных угловых секторах, ориентированных вдоль первого и второго продольных или поперечных противоположных направлений, и чтобы он получал таким образом данные анализа для различных относительных угловых положений оси (АЕ) по отношению к зонду (SU), iv) средства (МТ) обработки, выполненные с возможностью формирования на основе упомянутых полученных данных анализа карт, являющихся репрезентативными для поперечных или продольных ориентации и положений показаний отраженных сигналов внутри стенки (РА).
20. Устройство по п.19, отличающееся тем, что упомянутые средства (МС) контроля, выполненные с возможностью контроля, первый раз, относительного перемещения, по меньшей мере, одного зонда (SU) по отношению к наружной поверхности (SE) стенки (РА) таким образом, чтобы он получал данные анализа для различных относительных угловых положений упомянутой оси (АЕ) по отношению к нему (SU), с последующим контролем, второй раз, относительного перемещения, по меньшей мере, одного зонда (SU) по отношению к внутренней поверхности (SI) стенки (РА) таким образом, чтобы он анализировал, по меньшей мере, один третий выбранный участок стенки (РА) в, по меньшей мере, одном третьем выбранном угловом секторе, ориентированном вдоль выбранного продольного или поперечного направления, и чтобы получал таким образом другие данные анализа для различных относительных угловых положений упомянутой оси (АЕ) по отношению к нему (SU), а также тем, что упомянутые средства (МТ) обработки выполнены с возможностью формирования на основе полученных данных анализа карт, характерных для положений и ориентации показаний отраженных сигналов внутри стенки (РА).
21. Устройство по одному из пп.19 и 20, отличающееся тем, что упомянутые средства (МС) контроля выполнены с возможностью: i) контроля по меньшей мере, первый раз, относительного перемещения по меньшей мере одного зонда (SU) по отношению к наружной (SE) или внутренней (SI) поверхности стенки (РА) таким образом, чтобы он осуществлял ультразвуковой анализ в угловом секторе, ориентированном вдоль продольного направления, и чтобы он получал данные анализа, на основе которых средства (МТ) обработки сформируют карты, характерные для поперечных ориентации и положений показаний отраженных сигналов, затем ii) контроля, по меньшей мере, второй раз, относительного перемещения, по меньшей мере, одного зонда (SU) по отношению к наружной (SE) или внутренней (SI) поверхности стенки (РА) таким образом, чтобы он осуществлял ультразвуковой анализ в угловом секторе, ориентированном вдоль поперечного направления, и чтобы он получал данные анализа, на основе которых средства (МТ) обработки сформируют карты, характерные для продольных ориентации и положений показаний отраженных сигналов.
22. Устройство по п.19, отличающееся тем, что оно имеет в своем составе средства анализа поверхности, выполненные с возможностью анализа, по меньшей мере, наружной поверхности (SE) стенки (РА) при помощи другой технологии анализа, отличной от технологии, основанной на ультразвуке, таким образом, чтобы получить данные анализа для различных относительных положений оси (АЕ) по отношению к зонду (SU).
23. Устройство по п.22, отличающееся тем, что упомянутые средства (МТ) обработки выполнены с возможностью формирования на основе этих данных анализа, полученных при помощи упомянутых средств анализа поверхности (MAS), карт, характерных для положений и ориентации показаний поверхности стенки (РА).
24. Устройство по одному из пп.22 и 23, отличающееся тем, что упомянутые средства анализа поверхности выбираются в группе, содержащей средства анализа потока утечки и средства анализа при помощи токов Фуко.
25. Устройство по п.19, отличающееся тем, что оно имеет в своем составе средства (MD) перемещения, выполненные с возможностью обеспечения относительного перемещения в продольном направлении, по меньшей мере, одного зонда (SU) по отношению к оси (АЕ), и тем, что упомянутые средства (МС) контроля выполнены с возможностью контроля упомянутых средств (MD) перемещения так, чтобы они перемещали продольно и относительно, по меньшей мере, один зонд (SU) по отношению к оси (АЕ) для того, чтобы он анализировал часть, по меньшей мере, упомянутых первых, вторых и возможных третьих участков стенки (РА).
26. Устройство по п.19, отличающееся тем, что упомянутые средства (МС) контроля выполнены с возможностью осуществления электронного сканирования с использованием, по меньшей мере, одного зонда (SU) для того, чтобы он анализировал часть, по меньшей мере, упомянутых первых, вторых и возможных третьих участков стенки (РА).
27. Устройство по п.19, отличающееся тем, что упомянутый стенд (ВС) выполнен с возможностью приведения во вращение оси (АЕ) по отношению к каждому зонду (SU) таким образом, чтобы определить различные относительные угловые положения этой оси (АЕ) по отношению к каждому зонду (SU).
28. Устройство по п.19, отличающееся тем, что упомянутый стенд (ВС) выполнен с возможностью приведения во вращение, по меньшей мере, одного зонда (SU) по отношению к оси (АЕ) таким образом, чтобы определить различные относительные угловые положения упомянутой оси (АЕ) по отношению к зонду (SU).
29. Устройство по п.19, отличающееся тем, что упомянутые средства (МТ) обработки выполнены с возможностью сравнения данных из карт, полученных на подлежащей контролю оси (АЕ), с данными из первых эталонных карт, полученных на первой эталонной оси того же типа, что и контролируемая ось, но лишенной дефектов, и запоминания только тех данных, которые являются характерными для показаний отраженных сигналов, которые не присутствуют в первых эталонных картах, и формирования таким образом скорректированных карт.
30. Устройство по п.19, отличающееся тем, что упомянутые средства (МТ) обработки выполнены с возможностью сравнения данных из карт, полученных на подлежащей контролю оси (АЕ), с данными из вторых эталонных карт, полученных на второй эталонной оси того же типа, что и контролируемая ось, но содержащей известные дефекты, и запоминания только данных, характерных для показаний отраженных сигналов, характерных для известных дефектов, присутствующих в упомянутых вторых эталонных картах, и формирования таким образом карт дефектов.
31. Устройство по п.19, отличающееся тем, что упомянутые средства (МТ) обработки выполнены с возможностью сравнения амплитуд данных из карт, полученных на подлежащей контролю оси (АЕ) с выбранной пороговой амплитудой, и запоминание только данных, характерных для показаний отраженных сигналов, амплитуды которых превышают эту пороговую амплитуду и сигнализируют о наличии дефектов, и формирования таким образом карт дефектов.
32. Устройство по п.31, отличающееся тем, что упомянутые средства (МТ) обработки выполнены с возможностью генерирования предупреждающего сигнала в случае выявления амплитуды, превышающей упомянутую пороговую амплитуду.
33. Устройство по п.19, отличающееся тем, что оно имеет в своем составе экран (ЕС), способный отображать, по меньшей мере, некоторые из карт, сформированных средствами (МТ) обработки.
34. Устройство по п.19, отличающееся тем, что упомянутые зонды (SU) способны излучать ультразвук вдоль одного единственного направления с изменяемым углом.
35. Устройство по п.34, отличающееся тем, что упомянутый угол изменяется между 0° и примерно 70° по отношению к продольному или поперечному направлению.
36. Устройство по п.19, отличающееся тем, что упомянутые зонды (SU) представляют собой так называемые зонды с фазированной решеткой и способны излучать ультразвук вдоль направлений, заключенных в выбранном угловом секторе.
37. Устройство по п.36, отличающееся тем, что упомянутый угловой сектор заключен между примерно 0° и примерно 70° по отношению к продольному или к поперечному направлению.
| JP 2005283379 A, 13.10.2005 | |||
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ОСЕЙ КОЛЕСНЫХ ПАР | 2006 |
|
RU2313784C1 |
| СПОСОБ ЭХО-ИМПУЛЬСПОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯИЗДЕЛИЙ | 0 |
|
SU165000A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ, ИМЕЮЩИХ СЛОЖНУЮ ФОРМУ ТЕЛ ВРАЩЕНИЯ | 1993 |
|
RU2086975C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ, ИМЕЮЩИХ СЛОЖНУЮ ФОРМУ ТЕЛ ВРАЩЕНИЯ С НАЛИЧИЕМ НАПРЕССОВАННЫХ ДЕТАЛЕЙ | 1993 |
|
RU2084889C1 |
| JP 11023540 A, 29.01.1999 | |||
| JP 2002082099 A, 22.03.2002 | |||
| JP 55136952 A, 25.10.1980. | |||

