Изобретение относится к шкворням оси, которые, например, используются в области железнодорожной техники, в частности к контролю (или проверке) таких шкворней посредством неразрушающей технологии (неразрушающих технологий).
Специалистам известно, что некоторые шкворни оси, в частности шкворни, которым необходимо выдерживать значительные нагрузки, должны являться объектом неразрушающего контроля на различных этапах производства и обслуживания для обеспечения соответствия международным стандартам. Известные способы неразрушающего контроля достаточно хорошо приспособлены для полнотелых (монолитных) шкворней оси. Они основываются в основном на акустическом анализе, осуществляемом при помощи ультразвуковых контактных датчиков, а также, возможно, на проведении дополнительного анализа, например, на анализе поверхности или радиографическом анализе. К стандартам, которым должны соответствовать полнотелые шкворни оси, можно отнести, в частности, NF EN 13261-2004 - для Европы, ISO 5948-1994 и ISO 6933-1986 - для мирового сообщества, М 101/90-А для Соединенных Штатов Америки (Association of American Railroads, AAR), NBR 7947-1989 - для Бразилии и JIS E 4502-1-2002 - для Японии.
На основании полученных результатов анализа имеется возможность определить места нахождения поперечных и продольных дефектов и изъянов внутри образующих шкворень цельных материалов и установить, таким образом, соответствует или не соответствует данный шкворень международным стандартам (на этапе производства или обслуживания).
Недавно было выдвинуто предложение заменить некоторые полнотелые (или монолитные) шкворни оси полыми шкворнями оси, стенка которых имеет профиль поперечного сечения с переменными внутренним и внешним радиусами. Эти новые полые шкворни предпочтительны, в частности, потому, что позволяют добиться значительного уменьшения веса, как правило, приблизительно на 30% и увеличения тем самым массы перевозимого груза, что приводит к уменьшению расхода энергии и, таким образом, загрязнения среды. Но при проведении такого типа контроля полого шкворня оси возникают определенные проблемы.
Действительно, ввиду наличия профиля поперечного сечения с переменным внутренним радиусом представляется сложным отличить отраженные сигналы, поступающие из угловых зон (или углов), от сигналов, отраженных от дефектов или изъянов структуры.
Кроме того, размеры значительного количества таких дефектов и (или) изъянов меньше размеров дефектов и (или) изъянов, встречающихся в полнотелом шкворне, что делает их обнаружение еще более сложным с учетом небольших расстояний, которые преодолеваются ультразвуком.
И, наконец, расположение на некоторых участках полого шкворня некоторых предметов оборудования, в частности колес (насаживаемых с натягом) и тормозных дисков, для образования оси также способно привести к возникновению дополнительных конструктивных дефектов и (или) изъянов и даже увеличению размеров некоторых конструктивных изъянов и дефектов, образующихся в результате ранее выполненных операций горячей ковки и механической обработки. В связи с этим представляется еще более необходимым осуществлять контроль этих участков и прилегающих к ним зон как во время первой сборки, так при проведении операций по техническому обслуживанию (с демонтажем или без демонтажа оборудования(ий) оси). Кроме того, представляется сложным и даже невозможным осуществлять этот анализ на некоторых участках шкворня, когда на последнем установлено оборудование, с использованием существующих способов контроля.
Таким образом, технической задачей изобретения является способ и прибор для неразрушающего контроля, позволяющий вручную осуществлять точный контроль большей части и, по возможности, полностью полого шкворня оси (или в целом пустотелого (трубчатого) изделия, образованного в результате вращения), в том числе, когда последний снабжен оборудованием.
В связи с этим в нем предлагается способ контроля полого шкворня оси, включающий в себя следующие этапы:
а) размещение ручным способом, по меньшей мере, одного ультразвукового контактного датчика в первом месте, которое выбирается на внешней или внутренней поверхности стенки полого шкворня оси, причем эта стенка имеет профиль поперечного сечения с переменными и известными внешним и внутренним радиусами, причем каждое место выбирается в зависимости от этих профилей поперечного сечения и возможных габаритных размеров и условий эксплуатации шкворня, затем проведение анализа при помощи каждого контактного датчика первого выбранного участка стенки в первом выбранном угловом секторе, ориентированном в первом продольном или поперечном направлении, для получения результатов анализа для различных относительных угловых положений шкворня относительно контактного датчика;
b) установка вручную, по меньшей мере, одного контактного датчика во втором месте, которое всегда выбирается в зависимости от профилей поперечного сечения и возможных габаритных размеров и условий эксплуатации шкворня, затем проведение анализа при помощи каждого установленного контактного датчика второго выбранного участка стенки во втором выбранном угловом секторе, ориентированном во втором направлении, противоположном первому направлению, для получения других результатов анализа для различных относительных угловых положений шкворня относительно контактного датчика;
с) составление из полученных результатов анализа карт, на которых отображены поперечные и продольные направленности и положения индикаций отраженных сигналов внутри стенки.
В данном случае под термином «индикация отраженного сигнала» следует понимать информацию, полученную в стенке путем отражения от границы раздела (материал-воздух) или от дефекта или также (структурного) изъяна. Кроме того, в данном случае под термином «дефект» следует понимать часть стенки, которая приводит к образованию отраженного сигнала с амплитудой меньше заданной пороговой величины, которому, таким образом, не свойственно являться основанием для выбраковки шкворня. И, наконец, в данном случае под термином «изъян» следует понимать часть стенки, которая приводит к образованию отраженного сигнала, амплитуда которого больше заданной пороговой величины, которому, таким образом, свойственно приводить к выбраковке шкворня.
Способ в соответствии с изобретением может обеспечить получение результатов согласно многочисленным вариантам, некоторые из которых, по меньшей мере, характерные, могут объединяться друг с другом, в частности:
- можно, например, осуществить первый раз этапы а) и с) путем размещения вручную каждого ультразвукового контактного датчика на внешней поверхности стенки для составления карт, отображающих положения и направленности индикаций отраженных сигналов внутри стенки; затем можно выполнить второй раз, по меньшей мере, этапы а) и с) путем размещения вручную, по меньшей мере, одного ультразвукового контактного датчика на внутренней поверхности стенки в третьем месте, которое выбирается в зависимости от ее профилей поперечного сечения, а затем исследовать при помощи каждого контактного датчика третий выбранный участок стенки в третьем выбранном угловом секторе, ориентированном, по меньшей мере, в одном выбранном продольном или поперечном направлении, для получения результатов анализа для различных относительных угловых положений шкворня относительно контактного датчика, и составить карты, отображающие положения и направленности индикаций отраженных сигналов внутри стенки;
- можно, например, осуществить, по меньшей мере, один раз этапы а) и с) путем размещения вручную каждого ультразвукового контактного датчика на внешней или внутренней поверхности стенки для проведения ультразвукового анализа в угловом секторе, ориентированном в продольном направлении, и составить, таким образом, карты, отображающие поперечные направленности и положения индикаций отраженных сигналов внутри стенки, затем можно повторно выполнить также, по меньшей мере, один раз этапы а) и с) путем размещения вручную, по меньшей мере, одного ультразвуковой контактного датчика на внешней или внутренней поверхности стенки для выполнения ультразвукового анализа в угловом секторе, ориентированном в поперечном направлении, и составить, таким образом, карты, отображающие продольные направленности и положения индикаций отраженных сигналов внутри стенки;
- после выполнения этапа с) можно, например, предусмотреть этап d), в ходе которого проводится анализ, по меньшей мере, внешней поверхности стенки посредством другой технологии анализа, отличающейся от технологии, базирующейся на ультразвуковых колебаниях, для получения результатов анализа для различных относительных угловых положений, по меньшей мере, одного контактного датчика относительно шкворня, а также, возможно, этап е), в ходе которого на основании этих полученных результатов анализа составляются карты, отображающие положения и направленности индикаций поверхности стенки.
Например, упомянутая другая технология анализа может быть выбрана из числа так называемой технологии потока рассеяния и так называемой технологии вихревых токов.
- после выполнения этапа с) можно, например, предусмотреть этап d), в ходе которого проводится анализ, по меньшей мере, одной внешней поверхности стенки с использованием технологии так называемой проверки намагниченными частицами (или Magnetic Particule Inspection (MPI) - контроль методом магнитного порошка) для получения результатов анализа поверхности для различных относительных угловых положений шкворня относительно контактного датчика;
- можно, например, проводить анализ каждого из первых, вторых и, возможно, третьих участков стенки путем относительного продольного перемещения, по меньшей мере, одного контактного датчика относительно шкворня и (или) путем электронного сканирования посредством, по меньшей мере, одного контактного датчика;
- в процессе, по меньшей мере, одного из этапов а), b) и d) можно, например, получить различные относительные угловые положения шкворня относительно каждого контактного датчика из числа контактных датчиков, приводя во вращение каждый контактный датчик относительно этого шкворня;
- он может содержать этап f), в ходе которого проводится сравнение данных карт, полученных на этапе с), с данными первых эталонных карт, которые предварительно были сняты на первом эталонном шкворне такого же типа, что и контролируемый, но не имеющем изъянов, для получения только данных, содержащих индикации отраженных сигналов, которые не были представлены в первых эталонных картах, и составления, таким образом, «корригированных» карт;
- он может содержать этап g), в ходе которого проводится сравнение данных карт, полученных на этапе с) или f), с данными вторых эталонных карт, которые были сняты на втором эталонном шкворне такого же типа, что и контролируемый, но имеющем известные изъяны, для получения только данных, содержащих индикации отраженных сигналов с известными изъянами, которые были представлены во вторых эталонных картах, и составления, таким образом, карт изъянов;
- он может содержать этап h), в ходе которого проводится сравнение c выбранной амплитудой, имеющей пороговую величину, амплитуд с данными карт, которые были получены на этапе с) или f), для получения только данных, содержащих индикации отраженных сигналов, амплитуды которых выше амплитуды, имеющей пороговую величину, и, следовательно, сообщающих информацию о наличии изъянов, и составления, таким образом, карт изъянов.
В случае выявления амплитуды, которая выше амплитуды, имеющей пороговую величину, представляется возможным подавать сигнал о нарушении.
- он может содержать этап i), который заключается в выведении на экран дисплея, по меньшей мере, одной карты;
- могут, например, использоваться контактные датчики, способные излучать ультразвуковые колебания только в одном направлении с переменным углом.
Например, угол может меняться приблизительно от 0° до приблизительно 70° относительно продольного или поперечного направления.
- в качестве варианта могут, например, использоваться контактные датчики типа так называемой фазированной решетки (или «phased array»), способные излучать ультразвуковые колебания в направлениях, которые заключены в заданном угловом секторе.
Например, угловой сектор может составлять от приблизительно 0° до приблизительно 70° относительно продольного или поперечного направления.
Следует отметить, что этапы а)-с) должны выполняться в таком порядке, однако другие упомянутые этапы d)-i) не обязательно должны осуществляться в таком порядке. В частности, этап i) вполне может следовать после этапа с).
В изобретении также предлагается прибор для контроля шкворня оси, предназначенный для практической реализации представленного выше способа. Этот прибор, в частности, содержит:
- по меньшей мере, один ультразвуковой контактный датчик, предназначенный для анализа в выбранном угловом секторе выбранных участков стенки, имеющей профили поперечного сечения с известными и переменными внешним и внутренним радиусами, полого шкворня оси и получения, таким образом, результатов анализа;
- средства контроля, предназначенные для определения в зависимости от профилей поперченного сечения и возможных габаритных размеров и условий эксплуатации шкворня, по меньшей мере, первого и, по меньшей мере, второго выбранных мест на внешней или внутренней стенке, где вручную должен быть размещен каждый контактный датчик таким образом, чтобы он осуществлял анализ, по меньшей мере, первого и, по меньшей мере, второго выбранных участков стенки соответственно, по меньшей мере, в первом и, по меньшей мере, во втором выбранных угловых секторах, ориентированных в первом и втором противоположных продольном и поперечном направлениях, и получал, таким образом, результаты анализа для различных относительных угловых положений шкворня относительно нее;
- средства обработки, предназначенные для составления на основании полученных результатов анализа карт, отображающих поперечные или продольные направленности и положения индикации отраженных сигналов внутри стенки.
Данный прибор, в соответствии с изобретением, способен обеспечить получение результата согласно многочисленным вариантам, некоторые из которых, по меньшей мере, характерные, могут объединяться друг с другом, и в частности:
- его средства контроля могут быть предназначены для определения перед применением вручную на каждом контактном датчике первого перемещения относительно внешней поверхности стенки для получения результатов анализа для различных относительных угловых положений шкворня относительно каждого контактного датчика, затем для определения перед применением вручную, по меньшей мере, на одном контактном датчике второго перемещения относительно внутренней поверхности стенки для проведения им анализа, по меньшей мере, третьего выбранного участка стенки, по меньшей мере, в третьем выбранном угловом секторе, ориентированном в выбранном продольном или поперечном направлении, и для получения им, таким образом, других результатов анализа для различных относительных угловых положений шкворня относительно каждого контактного датчика. В этом случае средства обработки предназначены для составления на основании полученных результатов анализа карт, отображающих положения и направленности индикаций отраженных сигналов внутри стенки;
- его средства контроля могут быть предназначены I) для определения перед применением вручную на каждом контактном датчике первого перемещения относительно внешней или внутренней поверхности стенки для выполнения ультразвукового анализа в угловом секторе, ориентированном в продольном направлении, и для получения результатов анализа, на основании которых средства обработки составят карты, отображающие поперечные направленности и положения индикаций отраженных сигналов, а затем II) для определения перед применением вручную на каждом контактном датчике, по меньшей мере, второго перемещения относительно внешней или внутренней поверхности стенки для выполнения им ультразвукового анализа в угловом секторе, ориентированном в поперечном направлении, и для получения им результатов анализа, на основании которых средства обработки составят карты, отображающие продольные направленности и положения индикаций отраженных сигналов;
- он может содержать средства анализа поверхности, предназначенные для проведения анализа, по меньшей мере, внешней поверхности стенки путем другой технологии анализа, отличающейся от технологии, базирующейся на ультразвуковых колебаниях, для получения результатов анализа для различных относительных положений шкворня относительно контактного датчика. В этом случае средства обработки, возможно, будут предназначены для составления на основании этих результатов анализа, полученных путем анализа поверхности, карт, отображающих положения и направленности индикаций поверхности стенки.
Например, средства анализа поверхности выбираются из числа средств анализа потока рассеяния и средств анализа методом вихревых токов.
- он может содержать средства анализа поверхности, предназначенные для выполнения анализа, по меньшей мере, внешней поверхности стенки путем проверки намагниченными частицами (или MPI) для получения результатов анализа поверхности для различных относительных угловых положений шкворня относительно контактного датчика;
- его средства контроля могут быть предназначены для осуществления электронного сканирования посредством, по меньшей мере, одного контактного датчика для выполнения им анализа части, по меньшей мере, первых, вторых и, возможно, третьих участков стенки;
- его средства обработки могут быть предназначены для осуществления сравнения данных карт, снятых с контролируемого шкворня, с данными первых эталонных карт, которые были получены на первом эталонном шкворне такого же типа, что и контролируемый, но не имеющем изъянов, для сохранения только данных, содержащих индикации отраженных сигналов, которые не представлены в первых эталонных картах, и составления, таким образом, корригированных карт;
- его средства обработки могут быть предназначены для осуществления сравнения данных карт, полученных на контролируемом шкворне, с данными вторых эталонных карт, которые были сняты со второго эталонного шкворня такого же типа, что и контролируемый, но имеющем известные изъяны, для сохранения только данных, содержащих индикации отраженных сигналов с известными изъянами, которые были представлены во вторых эталонных картах, и составления, таким образом, карт изъянов;
- его средства обработки могут быть предназначены для проведения сравнения c выбранной амплитудой, имеющей пороговую величину, амплитуд с данными карт, которые были получены на контролируемом шкворне, и сохранения только данных, содержащих индикации отраженных сигналов, амплитуды которых выше имеющей пороговую величину амплитуды, и сообщающих информацию о наличии изъянов, и составления, таким образом, карт изъянов.
Его средства обработки могут быть предназначены для подачи сигнала о нарушении в случае определения амплитуды, которая выше амплитуды, имеющей пороговую величину.
- он может содержать экран дисплея для выведения на него, по меньшей мере, некоторых карт, составленных его средствами обработки;
- каждый контактный датчик, например, может быть предназначен для излучения ультразвуковых колебаний только в одном направлении с переменным углом, например, от приблизительно 0° до приблизительно 70° относительно продольного или поперечного направления;
- в качестве варианта каждый контактный датчик может быть типа фазированной решетки и предназначен для излучения ультразвуковых колебаний в направлениях, которые заключены в выбранном угловом секторе, например, от приблизительно 0° до приблизительно 70° относительно продольного или поперечного направления.
Другие отличительные признаки и преимущества изобретения станут видны после изучения нижеследующего детального описания и прилагаемых фигур чертежа, на которых:
Фиг.1 схематически изображает вид продольного сечения примера полого шкворня оси, не оснащенного оборудованием;
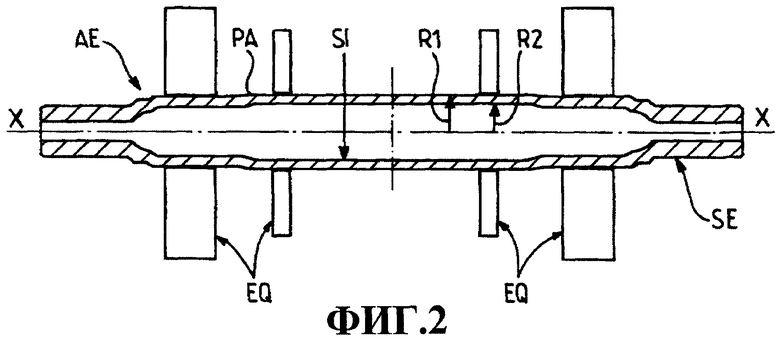
Фиг.2 схематически изображает вид продольного сечения части примера полого шкворня оси, оснащенного оборудованием;
Фиг.3 схематически и функционально изображает пример практической реализации прибора для контроля согласно изобретению;
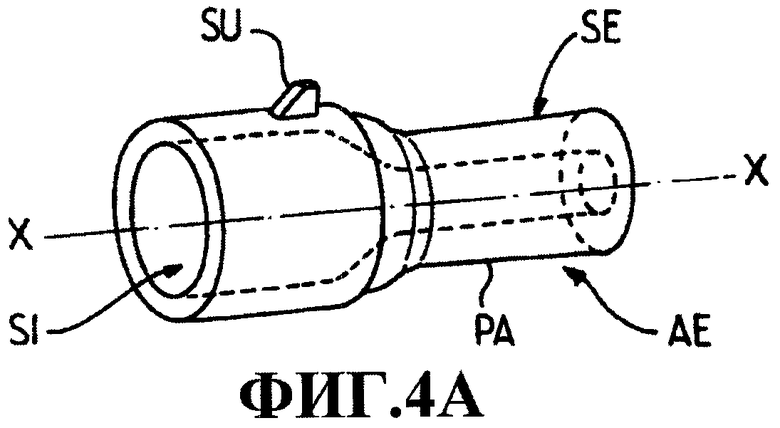
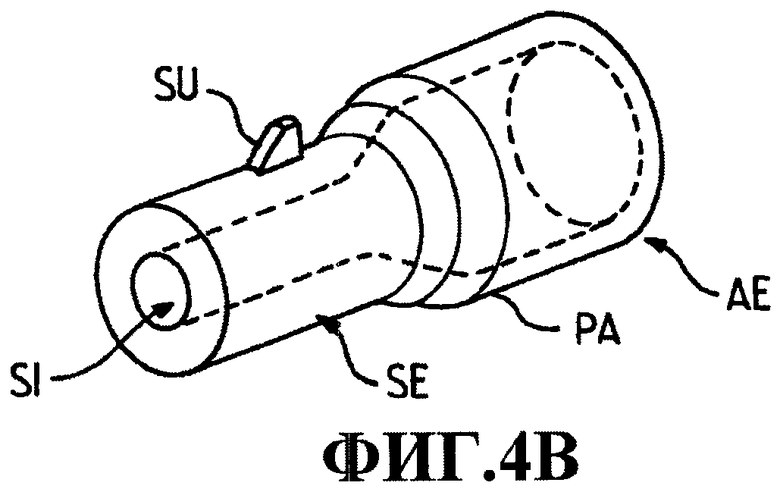
Фиг.4А и 4В схематически изображает два примера размещения контактного датчика в двух различных выбранных местах на внешней поверхности части стенки шкворня (вид в перспективе) для проведения продольного анализа;
Фиг.5 схематически изображает пример размещения контактного датчика в выбранном месте на внешней поверхности части стенки шкворня (вид в перспективе) для проведения поперечного анализа;
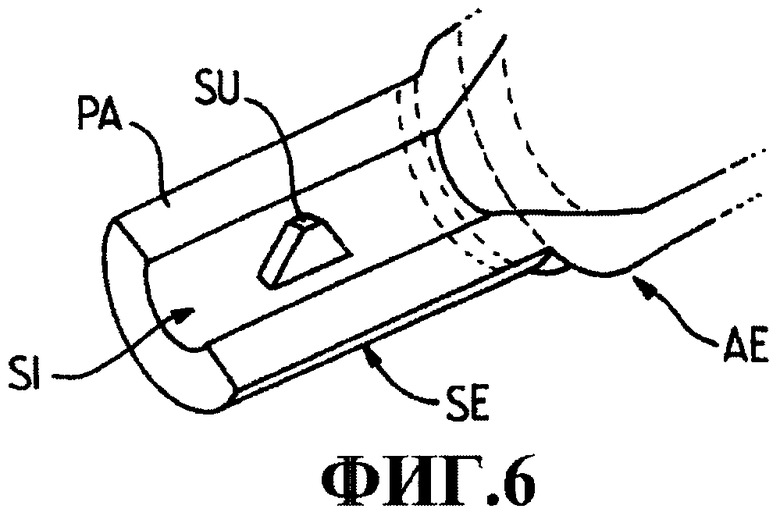
Фиг.6 схематически изображает пример размещения контактного датчика в выбранном месте внутренней поверхности части стенки шкворня (вид в перспективе) для проведения продольного анализа;
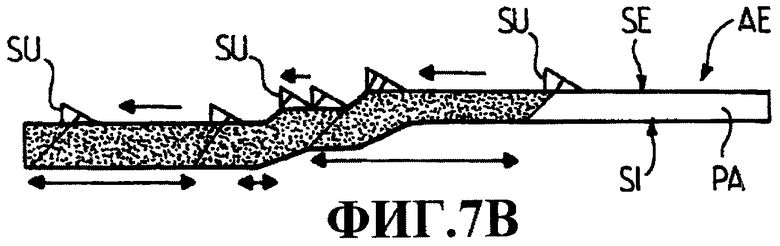
Фиг.7А-7С изображают первые участки части стенки, сверху которых размещены три мононаправленных контактных датчика, перемещающихся в продольном направлении справа налево, для углов излучения, равных, соответственно, 30°, 45° и 60°, ориентированных в первом продольном направлении;
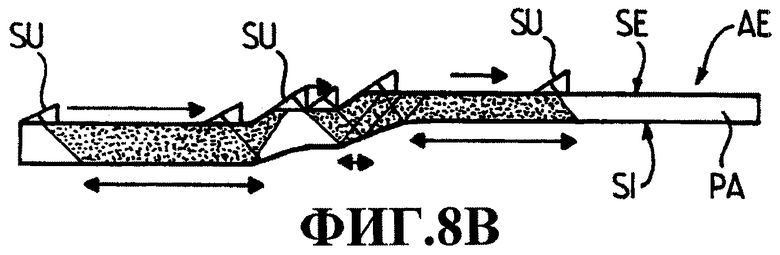
Фиг.8А-8С изображают вторые участки части стенки, показанной на фиг.7А-7С, сверху которых размещены три аналогичных мононаправленных контактных датчика, перемещающихся в продольном направлении слева направо, для углов излучения, равных соответственно 30°, 45° и 60°, ориентированных во втором продольном направлении;
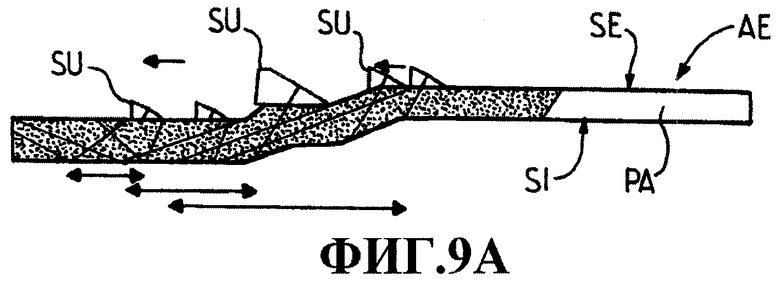
Фиг.9А и 9В изображают первые и вторые участки части стенки, показанной на фиг.7А-7С, сверху которых размещены три контактных датчика типа фазированной решетки для углов излучения от 30° до 70°, ориентированных соответственно в первом и втором продольном направлениях;
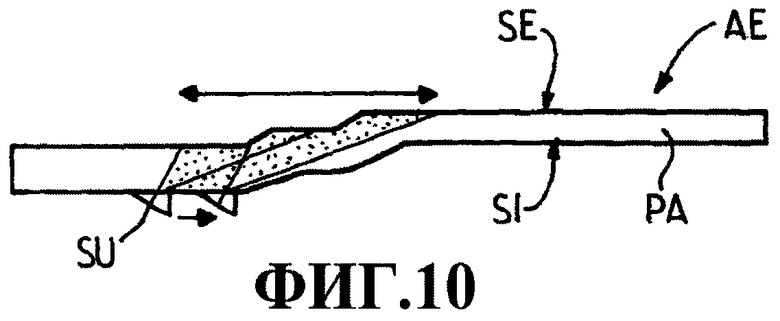
Фиг.10 изображает третий участок части стенки, сверху которого на внутренней поверхности размещен контактный датчик типа фазированной решетки для углового сектора от 30° до 70°, ориентированного в продольном направлении;
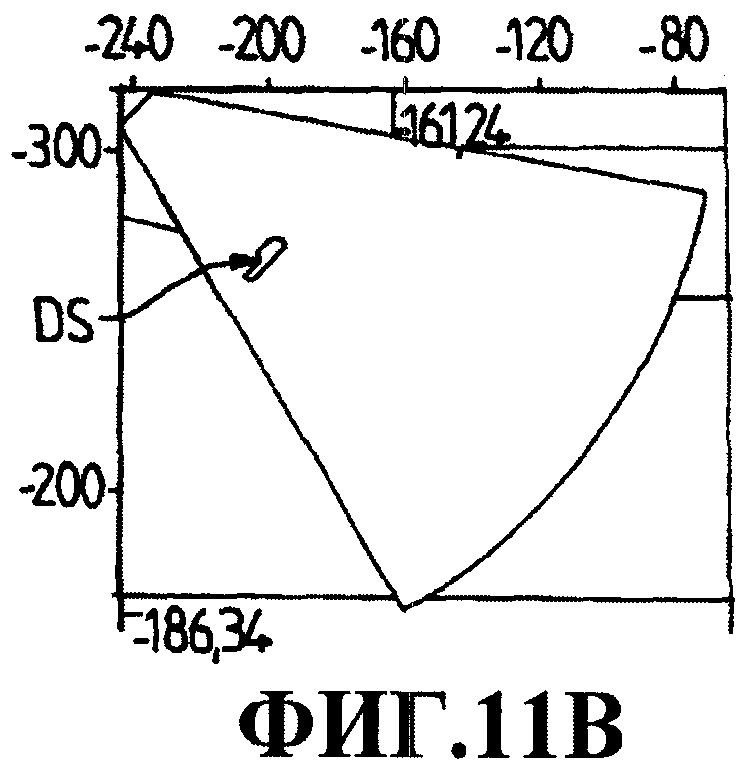
Фиг.11А и 11В изображают два примера карт, получаемых на одной и той же стенке шкворня оси.
Прилагаемые фигуры чертежа могут не только служить в качестве дополнения к изобретению, но также, в случае необходимости, способствовать пониманию его описания.
Целью изобретения является обеспечение ручного неразрушающего контроля большей части и, по возможности, полностью полого шкворня оси, в том числе, когда на последнем установлено оборудование.
В последующем считается, что контролируемые полые шкворни предназначены для использования в качестве составных элементов осей грузовых или пассажирских вагонов. Однако изобретение не ограничивается таким применением. Оно относится в действительности ко всем типам пустотелых (трубчатых) изделий, образованных в результате вращения, которые подвергаются воздействию эксплуатационных нагрузок, например нагрузок до усталостного напряжения, и стенка которых имеет профиль поперечного сечения с известными и переменными внешним и внутренним радиусами.
Как это показано на фиг.1, полый шкворень (оси) АЕ содержит стенку РА, которая определяется посредством операций горячей ковки и механической обработки и имеет в конечном итоге профили поперечного сечения с переменными внешним R1 и внутренним R2 радиусами. Следует отметить, что радиальная толщина (т.е. в направлении, перпендикулярном продольной оси ХХ) не обязательно является постоянной. Другими словами, профили поперечного сечения с внешним R1 и внутренним R2 радиусами не обязательно являются накладываемыми в близкой гомотетии.
Ручной контроль шкворня данного типа независимо от того, оснащен ли он оборудованием EQ (в частности, колесами и (или) тормозными дисками), как это показано в примере, изображенном на фиг.2, даже в том случае, если оборудование уже установлено на вагоне, или шкворень не оснащен оборудованием, как это показано в примере, изображенном на фиг.1, осуществляется при помощи прибора для контроля аналогичного типа, схематически и функционально представленного на фиг.3.
Такой прибор содержит, по меньшей мере, один ультразвуковой контактный датчик SU (в данном случае изображено семь единиц), один контрольный блок МС и один блок обработки МТ, а также, предпочтительно, один дисплей ЕС. Следует отметить, что контрольный блок МС, блок обработки МТ и дисплей ЕС могут входить в состав микро-ЭВМ (или рабочей станции) МО, подсоединенной к контактным датчикам SU, как это показано в качестве примера, не имеющего ограничительного характера, на фиг.3. В последующем считается, что прибор содержит, по меньшей мере, два контактных датчика SU.
Ультразвуковые контактные датчики SU могут быть установлены для излучения ультразвуковых колебаний только в одном направлении, угол которого задан, но может меняться в случае необходимости, или относиться к типу так называемой фазированной решетки («phased array»), т.е. устанавливаться для излучения ультразвуковых колебаний в нескольких направлениях, заключенных в угловом секторе, который выбирается в зависимости от потребностей (благодаря угловому электронному сканированию). Представляется также возможным получить эквивалент перемещения в продольном направлении датчика при помощи электронного сканирования.
В первом (мононаправленном) случае каждый контактный датчик SU содержит один элемент обнаружения, предназначенный для приема отраженных от стенки РА сигналов, которая является предметом анализа. Во втором случае (контактного датчика типа фазированная решетка) каждый контактный датчик SU содержит несколько элементов обнаружения, предназначенных для приема отраженных от являющейся предметом анализа стенки РА сигналов после их лучепреломления и (или) отражения (возможно, многократного) под различными углами. Следует напомнить, что элементы обнаружения, как правило, выполняются из композитного материала и устанавливаются на трансдукторах. Подвергшиеся возбуждению элементы обнаружения контактного датчика формируют расходящийся анализирующий пучок. Форма последнего и его общее направление наклона могут быть изменены электронным способом путем ввода временных задержек на уровне моментов возбуждения выбранных элементов обнаружения контактного датчика. «Виртуальным контактным датчиком» обычно называют сочетание элементов обнаружения контактного датчика и возможных соответствующих временных задержек, которые применяются для формирования анализирующего пучка в общем заданном направлении. Контактный датчик типа фазированная решетка может, таким образом, представлять собой множество (например, несколько десятков) виртуальных контактных датчиков в зависимости от комбинаций, предметом которых он является. Частота возбуждения трансдукторов обычно составляет около нескольких мегагерц (2-5 МГц). Эти же элементы обнаружения в случае, если они не возбуждены путем излучения, служат для улавливания сигналов, отраженных от границы раздела материал-воздух или материал-жидкость, свидетельствующих о наличии дефектов и изъянов. Они образуют, таким образом, измерительные преобразователи типа передачи/приема.
Профиль поперечного сечения с внутренним R2 и внешним R1 радиусами, которые имеет стенка РА, а также возможные габаритные размеры и условия эксплуатации шкворня АЕ анализируются, например, при помощи программного обеспечения моделирования типа CIVA 8.0 (разработано и распространяется в торговых сетях Комиссариатом по атомной энергии, СЕА) для определения количества контактных датчиков SU, которые будут необходимы для проведения анализа в полном объеме или только выбранной части шкворня АЕ с учетом их типа (мононаправленного или типа фазированной решетки, а во втором случае - количества элементов обнаружения), а также того, что они могут быть ориентированы для осуществления продольных или поперечных анализов в противоположных первом и втором направлениях.
В данном случае под термином «продольный анализ» следует понимать анализ, осуществляемый для поиска изъянов и (или) дефектов, ориентированных, предпочтительно, в продольном направлении или имеющих небольшой угол наклона относительно продольного направления ХХ (острый угол, как правило, составляет меньше ±25°, предпочтительно, меньше ±5°). Иногда используется термин наклонности положения для обозначения такой направленности изъяна. Этот анализ осуществляется посредством пучка, испускаемого в направлении, перпендикулярном продольному направлению ХХ, т.е. общее направление которого по существу продолжает распространяться в плоскости, перпендикулярной продольному направлению ХХ, или также составляет небольшой острый угол (как правило, меньше ±10°) с этим перпендикулярным направлением.
Кроме того, в данном случае под термином «поперечный анализ» следует понимать анализ, осуществляемый для поиска изъянов и (или) дефектов, ориентированных, предпочтительно, в поперечном направлении или имеющих небольшой угол наклона относительно плоскости, перпендикулярной продольному направлению ХХ (острый угол, как правило, составляет меньше ±25°, и, предпочтительно, меньше ±5°). Иногда используется термин наклонности для обозначения такой направленности изъяна. Этот анализ осуществляется посредством пучка, испускаемого в направлении, параллельном продольному направлению ХХ, т.е. общее направление которого по существу продолжает распространяться в плоскости, в которой собственно располагается продольное направление ХХ, или также составляет небольшой острый угол (как правило, меньше ±10°) с этим продольным направлением.
Кроме того, в данном случае под термином «условия эксплуатации шкворня» следует понимать содержание окружающего его пространства при проведении контроля. Действительно, будет понятно, что когда необходимо осуществлять контроль шкворня АЕ, установленного на вагоне, который, в свою очередь, расположен на рельсах, то участки, которые можно будет контролировать, могут быть значительно меньше.
С учетом форм профилей поперечного сечения с внутренним R2 и внешним R1 радиусами, которые, как правило, образуют стенку РА шкворня АЕ, а также возможных габаритных размеров и условий эксплуатации последних угол излучения мононаправленного контактного датчика SU обычно должен иметь возможность меняться от приблизительно 0° до приблизительно 70° относительно продольного направления ХХ, а угловой сектор излучения контактного датчика SU типа фазированная решетка, как правило, должен быть заключен в диапазоне от приблизительно 0° до приблизительно 70° относительно продольного направления ХХ.
После определения контрольным блоком МС для каждого контактного датчика SU (первого) выбранного места, в котором он должен быть изначально и вручную размещен относительно шкворня АЕ для проведения анализа первого выбранного участка стенки РА в первом выбранном угловом секторе, ориентированном в первом продольном или поперечном направлении, а также, возможно, (второго) выбранного места, в котором он должен быть в последующем вручную размещен относительно шкворня АЕ для проведения анализа второго выбранного участка стенки РА во втором выбранном угловом секторе, ориентированном во втором продольном или поперечном направлении, противоположном первому направлению, представляется возможным вручную расположить контактные датчики SU в их соответствующих выбранных первых местах.
Такое размещение ручным способом контактных датчиков SU относительно шкворня АЕ в зависимости от потребностей (и конфигурации шкворня АЕ) может осуществляться в первых выбранных местах, расположенных или на внешней поверхности SE стенки РА, или на внутренней поверхности SI этой стенки РА. Например, можно начинать с проведения анализов посредством ультразвуковых колебаний путем размещения контактных датчиков SU на внешней поверхности SE стенки РА, а затем, возможно, дополнить эти анализы путем размещения в дальнейшем контактных датчиков SU на внутренней поверхности SI стенки РА, т.е. внутри полого шкворня АЕ. Однако обратный порядок также возможен.
Соединение контактных датчиков SU с внутренней SI или внешней SE поверхностью стенки РА может быть выполнено любыми известными специалистам средствами, в частности, при помощи глицерина или путем погружения в воду, предпочтительно, смешанную с антикоррозионным веществом.
На фиг.4А и 4В изображены два примера размещения контактного датчика SU в двух выбранных местах внешней поверхности SE части стенки РА шкворня АЕ для проведения продольного анализа. На фиг.5 также изображен пример размещения контактного датчика SU в выбранном месте внешней поверхности SE части стенки РА шкворня АЕ для проведения поперечного анализа. На фиг.6 также изображен пример размещения контактного датчика SU в выбранном месте внутренней поверхности SI части стенки РА шкворня АЕ для проведения продольного анализа.
Важно отметить, что контактный датчик SU может проводить анализ выделенного для него участка или путем его удерживания на уровне выбранного места, или путем его перемещения специалистом вручную в продольном и (или) поперечном направлении между исходным положением (соответствует первоначально выбранному положению) и конечным положением (соответствует другому выбранному положению), возможно, с прохождением одного или нескольких промежуточных положений (каждое соответствует другому выбранному месту).
Вместо перемещения ручным способом или также в дополнение к такому перемещению некоторые контактные датчики SU могут применяться в режиме электронного сканирования под контролем контрольного блока МС для осуществления анализа части, по меньшей мере, участков стенки РА. Следует напомнить, что электронное сканирование обеспечивается контактным датчиком SU путем использования некоторых из его элементов обнаружения, расположенных в выбранных ячейках его фазированной решетки, и путем выделения для этих выбранных элементов обнаружения заданных задержек для осуществления последовательного излучения. Такой режим «электронного» перемещения является предпочтительным, поскольку он исключает необходимость перемещения вручную контактного датчика SU.
Контрольный блок МС предназначен для определения, в зависимости от внутреннего и внешнего профилей поперечного сечения контролируемого шкворня АЕ и возможных габаритных размеров и условий эксплуатации последнего, по меньшей мере, первых и вторых выбранных мест на внешней SE или внутренней SI поверхности стенки РА, где должны быть размещены вручную контактные датчики SU для проведения ими анализа первых и вторых выбранных участков стенки РА соответственно в первых и вторых выбранных угловых секторах, ориентированных в противоположных первом и втором продольных (направление ХХ) или поперечных (направление, перпендикулярное направлению ХХ) направлениях, и для получения ими, таким образом, результатов анализа для различных относительных угловых положений шкворня АЕ относительно контактных датчиков SU.
Следует отметить, что используемое для осуществления анализа всего выбранного участка стенки РА решение зависит от типа имеющегося в распоряжении контактного датчика SU, а в случае применения контактных датчиков типа фазированная решетка, кроме того, и от количества образующих ее элементов обнаружения. Действительно, далее будет понятно, что, если количество элементов обнаружения контактного датчика SU обеспечивает покрытие выделенного для них участка стенки РА, то отсутствует необходимость предусматривать ручное продольное перемещение, поскольку оно может быть заменено электронным сканированием. Например, если контактному датчику SU необходимо покрывать участок стенки РА, вытянутый в продольном направлении на расстояние, равное 100 мм, то он должен содержать, по меньшей мере, 200 элементов обнаружения со стороной 0,5 мм, разделенные попарно, например, на расстояние, равное приблизительно 0,1 мм. Следует напомнить, что чем меньше размеры элементов обнаружения, тем шире могут быть анализируемые угловые секторы. Можно найти компромиссное решение между количеством элементов обнаружения контактных датчиков SU и предоставляемыми электронным сканированием возможностями увеличения покрытия для исключения продольных перемещений, осуществляемых ручным способом.
Следует также отметить, что применение контактных датчиков типа фазированная решетка является более предпочтительным, чем использование мононаправленных контактных датчиков, поскольку оно позволяет добиться лучшей целостности в одном и том же анализируемом угловом секторе, исключая при этом необходимость любого углового перемещения источника ультразвуковых колебаний.
Согласно изобретению после размещения вручную контактных датчиков SU на внешней SE или внутренней SI поверхности стенки РА в первых местах (выбраны в зависимости от их профилей поперечного сечения и возможных габаритных размеров и условий эксплуатации шкворня АЕ) каждый из этих контактных датчиков SU приступает к проведению анализа первого участка стенки РА, который для него был определен контрольным блоком МС, в первом выбранном угловом секторе, ориентированном в первом продольном или поперечном направлении. Каждый контактный датчик SU может, таким образом, получать результаты анализа, действительные для текущего относительного углового положения шкворня АЕ относительно упомянутого контактного датчика SU. Осуществляя угловое перемещение контактных датчиков SU относительно шкворня АЕ в выбранных последовательных угловых секторах, каждый контактный датчик SU может обеспечивать получение новых результатов анализа после выполнения каждого углового перемещения. Таким образом, имеется возможность располагать результаты анализа относительно целостности периметра каждого первого проверяемого участка стенки РА.
Эти результаты анализа содержат, например, углы излучения, моменты излучения и приема ультразвуковых колебаний (или, что является равнозначным, временные интервалы между моментами излучения и приема) и углы приема. Они передаются, например, контактными датчиками SU в контрольный блок МС, который обязан их разместить в памяти MY согласно продольным и угловым положениям первых проверяемых участков относительно выбранной системы отсчета, а также, возможно, идентификатора используемого для их получения контактного датчика SU.
Далее, по меньшей мере, некоторые контактные датчики SU вручную размещаются на внешней SE или внутренней SI поверхности стенки РА во вторых местах (выбраны в зависимости от их профилей поперечного сечения и возможных габаритных размеров и условий эксплуатации шкворня АЕ) для того, чтобы они приступили к проведению анализа вторых участков стенки РА, которые для них соответствующим образом были определены, во вторых выбранных угловых секторах, ориентированных во втором продольном или поперечном направлении, противоположном первому направлению.
Например, если первое направление соответствует направлению, следующему слева направо вдоль продольной оси ХХ, то второе направление соответствует направлению, следующему справа налево вдоль упомянутой продольной оси ХХ. Аналогичным образом, если первое направление соответствует направлению, следующему слева направо вдоль второй оси, перпендикулярной продольной оси ХХ, то второе направление соответствует направлению, следующему справа налево упомянутой второй оси.
Каждый размещенный вручную контактный датчик SU может, таким образом, получать результаты анализа, действительные для его текущего относительного углового положения относительно шкворня АЕ в выбранных последовательных угловых секторах, причем каждый контактный датчик SU может обеспечивать получение новых результатов анализа после осуществления каждого углового перемещения. Таким образом, имеется возможность располагать результаты анализа относительно целостности периметра каждого второго проверяемого участка стенки РА. Эти результаты анализа передаются, например, контактными датчиками SU в контрольный блок МС, который обязан их разместить в памяти MY согласно продольным и угловым положениям вторых проверяемых участков относительно выбранной системы отсчета, а также, возможно, идентификатора используемого для их получения контактного датчика SU.
Как это следует из фиг.7-10, такой двойной анализ, выполняемый в противоположных направлениях, позволяет проверять (по необходимости) полностью или только часть шкворня оси АЕ. В частности, Фиг.7А-7С изображают первые участки части стенки, которые могут быть покрыты тремя мононаправленными контактными датчиками, которые размещаются на внешней SE поверхности и перемещаются в продольном направлении справа налево, для углов излучения, равных соответственно 30°, 45° и 60°, ориентированных в первом продольном направлении (следует справа налево);
Фиг.8А-8С изображают вторые участки этой же части стенки, которые могут быть покрыты тремя такими же мононаправленными контактными датчиками, которые размещаются на внешней SE поверхности и перемещаются в продольном направлении слева направо, для углов излучения, равных соответственно 30°, 45° и 60°, ориентированных во втором продольном направлении (следует слева направо);
Фиг.9А изображает первые участки этой же части стенки, которые могут быть покрыты тремя контактными датчиками типа фазированная решетка, которые размещаются на внешней SE поверхности, для угла излучения, заключенного в диапазоне от 30° до 70°, ориентированного в первом продольном направлении (следует справа налево);
Фиг.9В изображает вторые участки этой же части стенки, которые могут быть покрыты тремя такими же контактными датчиками типа фазированная решетка, которые размещаются на внешней SE поверхности, для угла излучения, заключенного в диапазоне от 30° до 70°, ориентированного во втором продольном направлении (следует слева направо);
Фиг.10 изображает третьи участки этой же части стенки, которые могут быть покрыты одним контактным датчиком типа фазированная решетка, который размещается на внутренней поверхности SI, для угла излучения, заключенного в диапазоне от 30° до 70°, ориентированного в продольном направлении (следует слева направо).
С учетом форм профилей поперечного сечения с внутренним R2 и внешним R1 радиусами, которые, как правило, образуют стенку РА шкворня АЕ, а также возможных габаритных размеров и условий эксплуатации последних угол излучения мононаправленного контактного датчика SU обычно должен иметь возможность меняться от приблизительно 0° до приблизительно 70° относительно продольного ХХ или поперечного направления, а угловой сектор излучения контактного датчика SU типа фазированная решетка, как правило, должен быть заключен в диапазоне от приблизительно 0° до приблизительно 70° относительно продольного ХХ или поперечного направления.
Каждая стрелка с двойным направлением, изображенная на фиг.7-10, показывает продольное увеличение (первого) участка, анализ которого проводится при помощи контактного датчика SU (размещен сверху). Далее будет понятно, что габаритный размер и (или) условия эксплуатации шкворня оси АЕ значительно уменьшает (уменьшают) в некоторых его частях продольное увеличение участков, которые технически могут быть проанализированы (покрыты) одним и тем же контактным датчиком SU. В частности, это относится к частям, расположенным под колесами, в которых имеется большая вероятность наличия структурных изъянов, обусловленных необходимостью насаживания с натягом и (или) переносимыми нагрузками, и которые, таким образом, должны являться предметом, по возможности, наиболее точной и полной проверки (анализа).
Хранящиеся данные анализа извлекаются при помощи блока обработки МТ, который обязан, таким образом, осуществить их группирование в соответствии с зонами шкворня, к которым они относятся, для составления карт, которые отображают поперечные или продольные направленности и положения индикации отраженных сигналов внутри стенки РА.
Следует отметить, что индикации отраженных сигналов являются результатом отражения или от границы раздела материал-воздух или материал-вода, или от дефекта, или также от изъяна.
Также следует отметить, что продольные анализы особенно приспособлены для обнаружения поперечных дефектов и изъянов, которые, как правило, наиболее часто встречаются, в то время как поперечные анализы особенно приспособлены для обнаружения продольных дефектов и изъянов.
Факт проведения проверки материалов в двух противоположных друг другу направлениях и, таким образом, в крайне различных направлениях проведения анализа позволяет выявлять дефекты и изъяны более маленьких размеров и в связи с этим большее количество дефектов и изъянов, чем с применением способов и приборов для контроля предшествующего уровня техники, которые предназначены для полнотелых (или монолитных) шкворней. Но это также позволяет обеспечить хорошее обнаружение внутри стенки РА дефектов и изъянов, имеющих наклоненную и скошенную форму (или «tiltés»).
Следует отметить, что блок обработки МТ может, в случае необходимости, устанавливаться таким образом, чтобы проводить «сопоставление» относительных результатов анализа в идентичных зонах, представляющих собой зоны покрытия первого (первых) и (или) второго (вторых) участков стенки. Таким образом, они могут составлять «черновые» карты этих зон покрытия, возможно, трехмерного типа (3D).
Массивы данных, образующих «черновые» карты, предпочтительно, заносятся в память MY. Таким образом, эти карты могут или выводиться на экран ЕС дисплея в индивидуальном порядке (одна за другой) или сгруппированными (несколько в одно и то же время) для проведения анализа специалистом, или сначала автоматически анализироваться, а затем преобразовываться в «корригированные» карты или карты «изъянов», которые могут быть выведены на экран ЕС дисплея в индивидуальном порядке или сгруппированными.
На «черновых» картах могут выполняться многочисленные виды сопоставительного анализа.
Например, блок обработки МТ может быть предназначен для проведения сравнения данных, по меньшей мере, некоторых карт, которые были получены на контролируемом шкворне АЕ, с данными первых эталонных карт, которые были сняты на первом эталонном шкворне такого же типа, что и контролируемый, но не имеющем изъянов. В этом случае блок обработки МТ сохраняет только данные, содержащие индикации отраженных сигналов, которые не были представлены в первых эталонных картах, для составления корригированных карт, которые заносятся блоком обработки в память MY.
В качестве варианта или дополнения блок обработки МТ может быть предназначен для проведения сравнения данных, по меньшей мере, некоторых карт («черновых» или «корригированных»), полученных на шкворне АЕ, с данными вторых эталонных карт, которые были сняты на втором эталонном шкворне такого же типа, что и контролируемый, но содержащем известные изъяны. В этом случае блок обработки МТ сохраняет только данные, содержащие индикации отраженных сигналов с известными изъянами, которые представлены во вторых эталонных картах, для составления карт изъянов, которые заносятся блоком обработки в память MY.
В качестве варианта или дополнения блок обработки МТ может быть предназначен для проведения сравнения c выбранной амплитудой, имеющей пороговую величину, амплитуд индикаций отраженных сигналов, содержащихся, по меньшей мере, на некоторых картах. В этом случае блок обработки МТ сохраняет только данные, содержащие индикации отраженных сигналов, амплитуды которых выше амплитуды, имеющей пороговую величину, и которые в связи с этим, как считается, обладают изъянами, для составления карт изъянов.
Кроме того, может также рассматриваться вариант формирования блоком обработки МТ сигнала о нарушении (звукового и (или) зрительного, который выводится на экран ЕС дисплея) каждый раз, когда МТ будет установлено, что амплитуда выше амплитуды, имеющей пороговую величину).
На фиг.11А и 11В изображены два примера «черновых» карт, полученных на одной и той же стенке РА шкворня оси АЕ. Выявленные структурные изъяны обозначены позицией DS.
Как ранее указывалось, анализ стенки РА можно произвести путем размещения вручную контактных датчиков SU на внешней стороне SE или также на внутренней стороне SI. Однако представляется также возможным рассмотреть вариант осуществления двойного анализа, например, сначала путем размещения вручную контактных датчиков SU на внешней поверхности SE, затем путем размещения вручную некоторых контактных датчиков SU на внутренней поверхности SI. Если быть более точным, то в этом случае контактные датчики SU размещаются вручную на внешней поверхности SE стенки РА в первых выбранных местах, и при помощи этих контактных датчиков SU проводится анализ первых выбранных участков стенки РА в первых выбранных угловых секторах, ориентированных в первом продольном (или поперечном) направлении, для получения результатов анализа для различных угловых положений контактных датчиков SU относительно шкворня АЕ. Затем, по меньшей мере, некоторые из контактных датчиков SU размещаются вручную на внешней поверхности SE стенки РА во вторых выбранных местах, и при помощи этих контактных датчиков SU проводится анализ вторых выбранных участков стенки РА во вторых выбранных угловых секторах, ориентированных во втором продольном (или поперечном) направлении, противоположном первому направлению, для получения результатов анализа для различных угловых положений контактных датчиков SU относительно шкворня АЕ. И, наконец, по меньшей мере, некоторые из контактных датчиков SU размещаются вручную на внутренней поверхности SI стенки РА в третьих выбранных местах, и при помощи этих контактных датчиков SU проводится анализ третьих выбранных участков стенки РА в третьих выбранных угловых секторах, ориентированных, по меньшей мере, в одном продольном (или поперечном) направлении и даже в двух противоположных направлениях, для получения результатов анализа для различных угловых положений контактных датчиков SU относительно шкворня АЕ.
Блоком обработки МТ, таким образом, на основании совокупности результатов анализа составляются карты, отображающие положения и направленности индикаций отраженных сигналов внутри стенки РА.
Такой двойной анализ, выполняемый с внешней и внутренней стороны, может позволить покрыть всю совокупность проверяемых участков стенки РА, в то время как это может быть признано невыполнимым путем проведения только одного анализа, осуществляемого с внешней стороны, с учетом профилей поперечного сечения этой стенки РА и (или) габаритных размеров и (или) условий эксплуатации шкворня АЕ.
Представляется также возможным провести первый продольный анализ в двух направлениях (как это указывалось выше) и с внешней стороны (или внутренней стороны), а затем второй поперечный анализ, по меньшей мере, в одном направлении и с внешней стороны (или с внутренней стороны) для составления карт, отображающих поперечные направленности и положения индикаций отраженных сигналов внутри стенки РА, и карт, отображающих продольные направленности и положения индикаций отраженных сигналов внутри этой же стенки РА.
Представляется также возможным провести первый продольный анализ в двух направлениях и с внешней стороны, а затем второй поперечный анализ, по меньшей мере, в одном направлении и с внутренней стороны.
Представляется также возможным провести первый поперечный анализ в двух направлениях и с внутренней стороны, а затем второй анализ, по меньшей мере, в одном направлении и с внешней стороны.
В целом могут рассматриваться любые комбинации продольного (продольных) и поперечного (поперечных) анализов, проводимых с внутренней и внешней стороны.
Следует отметить, что для проведения анализов с внутренней стороны в отдельных случаях может потребоваться корректирующая расточка, по меньшей мере, краев полых шкворней оси АЕ для обеспечения размещения, по меньшей мере, одного контактного датчика SU внутри этого шкворня АЕ против внутренней поверхности SI стенки РА, а также его, возможного, перемещения ручным способом.
Следует также отметить, что места размещения контактных датчиков SU, различные углы или различные угловые сектора проведения анализа посредством ультразвуковых колебаний каждого из контактных датчиков SU и участки стенки, предназначенные для различных контактных датчиков, возможно, могут быть определены контрольным блоком МС в зависимости от условия (условий). Таким образом, можно рассматривать, что часть контроля будет осуществляться посредством одного пучка, продолжение общей направленности которого по существу располагается в плоскости, имеющей, в свою очередь, продольное направление ХХ, и на участках стенки, содержащих попарно заданный коэффициент покрытия, составляющий, например, 50%, и (или) что часть контроля будет осуществляться посредством последовательных пучков, продолжение общей направленности которых по существу располагается в плоскостях, образующих острые углы с данным продольным направлением ХХ, которые пересекаются под углами от 0° до +20° и от 0° до -20°. Кроме того, угол наклона элементов обнаружения контактного датчика SU может выбираться в зависимости от потребности. В качестве примера, который не носит ограничительного характера, может быть выбран угол в 45° относительно продольного направления ХХ.
Следует также отметить, что, как это известно специалистам, коэффициент усиления каждого трансдуктора должен являться предметом корректировки на этапе проверки по эталону, например, для обеспечения соответствия амплитуды сигнала, получаемого на первом отраженном сигнале, полученном от границы раздела стенки РА, амплитуде, равной, например, приблизительно 50% общего динамического диапазона амплитуды, использованной для карт.
Кроме того, этап проверки по эталону также содержит, предпочтительно, первую часть, предназначенную для получения вышеупомянутых эталонных карт, которые отображают результаты анализов посредством ультразвуковых колебаний, проведенных на эталонном полом шкворне оси, аналогичного типа, что и шкворень, который будет контролироваться, но неповрежденном, т.е. не имеющем структурных дефектов и изъянов. Эта первая часть этапа проверки по эталону позволяет в действительности заранее иметь сведения об отраженных сигналах, которые образуются в результате геометрической формы стенки РА (в частности, углы и в целом зоны, в которых внутренний R2 или внешний R1 радиус существенным образом меняются) и, таким образом, их дифференцировать от отраженных сигналов, которые образуются структурными дефектами и изъянами контролируемого полого шкворня оси АЕ.
Этап проверки по эталону может также содержать вторую часть, предназначенную для получения вышеупомянутых эталонных карт, которые являются отражением результатов анализов, выполненных посредством ультразвуковых колебаний на эталонном полом шкворне оси, аналогичного типа, что и шкворень оси, который должен стать предметом контроля, но эталон которого содержит типичные структурные или искусственные дефекты (например, характерные насечки или полости), в выбранных местах. Эти типичные структурные или искусственные дефекты определены в соответствии с техническими условиями и (или) стандартами, которые закрепляют пороговую величину сортировки дефектов и изъянов. Когда амплитуда сигнала, отраженного от естественного изъяна, меньше пороговой величины сортировки, то имеет место быть дефект. В обратном случае (больше пороговой величины) имеет место быть изъян. Эта вторая часть этапа проверки по эталону позволяет в действительности заранее иметь сведения об отраженных сигналах, которые образуются типичными структурными или искусственными изъянами и, таким образом, иметь возможность легче выявлять на картах путем сравнения с пороговой величиной сортировки «объекты», которые формируют отраженные сигналы (или отметки отраженного сигнала на экране индикатора) аналогичных типов, что и в контролируемых полых шкворнях оси АЕ.
После завершения продольного и (или) поперечного анализа посредством ультразвуковых колебаний полого шкворня оси АЕ в дальнейшем представляется возможным осуществить вручную, по меньшей мере, один дополнительный анализ другого типа. Например, можно провести анализ внешней поверхности SE стенки РА для получения результатов анализа поверхности для различных относительных положений шкворня АЕ относительно средств анализа поверхности.
Среди возможно используемых технологий проведения анализа можно, в частности, выделить технологию анализа так называемого потока рассеяния и технологию анализа так называемых вихревых токов. Некоторые из этих технологий являются предпочтительными, поскольку они предоставляют данные анализа поверхности, на основании которых можно составить карты, отображающие положения и направленности изъянов поверхности стенки РА. Массивы данных, образующие карты изъянов поверхности, предпочтительно, хранятся в памяти MY для того, чтобы упомянутые карты изъянов поверхности можно было бы вывести на экран ЕС дисплея или в индивидуальном порядке (одна за другой), или сгруппированными (несколько в одно и то же время), возможно, с картами структурных изъянов (получаются посредством ультразвуковых колебаний) для проведения анализа специалистом и (или) сопоставления с картами, получаемыми при помощи контактных датчиков SU. Это также может позволить при помощи прибора произвести автоматическое сравнение карт изъянов поверхности и карт, полученных посредством ультразвуковых колебаний.
Следует отметить, что также можно проводить анализ поверхности типа MPI (Magnetic Particle Inspection - магнитно-порошковый контроль). Следует напомнить, что такая технология заключается в покрытии внешней поверхности SE стенки РА намагниченными частицами и проявителем, в намагничивании проверяемой стенки, а затем в визуальном наблюдении (невооруженным глазом) под ультрафиолетовыми лучами UV за отклонениями направленности этих намагниченных частиц, причем отклонения направленности обусловлены присутствием изъянов или дефектов. Отрицательной стороной такой технологии проведения анализа поверхности является то, что она не позволяет в настоящее время предоставлять карты изъянов поверхности, а также в том, что она основывается исключительно на визуальном наблюдении специалиста, осуществляющего контроль над шкворнем АЕ, и требует в дальнейшем зрительного, а не автоматического визуального сравнения с картами, полученными при помощи ультразвуковых колебаний. Таким образом, возникает зависимость от того, как это будет интерпретировано специалистом, а также от непредвиденных случаев.
Следует также отметить, что карты, которые рассматривались ранее, могут относиться к любым известным специалистам типам, в частности типам A-Scan, B-Scan, C-Scan, D-Scan, S-Scan (или Sector Scan). В качестве примера, который носит исключительно иллюстративный характер, можно, например, составить карты типа S-Scan, которые предоставляют индикации местоположения в объеме - одна карта для каждого положения контактного датчика.
Благодаря изобретению представляется возможным выявлять дефекты и изъяны, имеющие толщину приблизительно 2 мм (т.е. приблизительно 5% номинальной толщины стенки РА в радиальном направлении), длину приблизительно 5 мм и ширину приблизительно 1 мм. Кроме того, могут быть обнаружены продольные и поперечные дефекты и изъяны, имеющие наклон с острыми углами, как правило, меньше ±25° и, предпочтительно, меньше ±5°. Кроме того, могут быть обнаружены продольные или поперечные полости (flaws), которые содержат углы различия направлений (tilt angles), способные достигать приблизительно 60°.
Изобретение не ограничивается примерами способов и прибора для контроля полых шкворней оси, описание которых приведено ранее только в качестве иллюстрации, и охватывает все варианты, которые могут быть рассмотрены специалистом в рамках нижеследующей формулы.








Использование: для ручного неразрушающего контроля полых шкворней оси, обладающих профилями поперечного сечения с переменными внутренним и внешним радиусами. Сущность: заключается в том, что прибор для контроля шкворней оси содержит: I) по меньшей мере, один ультразвуковой контактный датчик (SU), предназначенный для проведения анализа в выбранном угловом секторе выбранных участков стенки (РА), имеющей профили поперечного сечения с известными и переменными внешним и внутренним радиусами, полого шкворня оси (АЕ) и получения, таким образом, результатов анализа; II) средства контроля (МС), предназначенные для определения, в зависимости от упомянутых профилей поперечного сечения и возможных габаритных размеров и условий эксплуатации упомянутого шкворня, по меньшей мере, первого и, по меньшей мере, второго выбранных мест на внешней (SE) или внутренней (SI) поверхности стенки (РА), где вручную должен быть размещен каждый контактный датчик (SU) таким образом, чтобы он осуществлял анализ, по меньшей мере, первого и, по меньшей мере, второго выбранных участков упомянутой стенки (РА), соответственно, по меньшей мере, в первом и, по меньшей мере, во втором выбранных угловых секторах, ориентированных в первом и втором противоположных продольном или поперечном направлениях, и получал, таким образом, результаты анализа для различных относительных угловых положений упомянутого шкворня (АЕ) относительно него (SU) и III) средства обработки (МТ), предназначенные для составления на основании полученных результатов анализа карт, отображающих поперечные или продольные направленности и положения индикации отраженных сигналов внутри упомянутой стенки (РА). Технический результат: обеспечение возможности осуществления точного неразрушающего контроля полого шкворня. 2 н. и 33 з.п. ф-лы, 18 ил.
1. Способ контроля шкворней оси посредством ультразвуковых контактных датчиков, отличающийся тем, что он включает в себя следующие этапы:
а) размещения ручным способом, по меньшей мере, одного ультразвукового контактного датчика (SU) в первом месте, которое выбирают на внешней (SE) или внутренней (SI) поверхности стенки (РА) полого шкворня оси (АЕ), причем упомянутая стенка (РА) имеет профили поперечного сечения с переменными и известными внешним и внутренним радиусами, причем каждое первое место выбирают в зависимости от упомянутых профилей поперечного сечения и возможных габаритных размеров и условий эксплуатации упомянутого шкворня (АЕ), затем проведения анализа при помощи каждого контактного датчика (SU) первого выбранного участка упомянутой стенки (РА) в первом выбранном угловом секторе, ориентированном в первом продольном или поперечном направлении, для получения результатов анализа для различных относительных угловых положений упомянутого шкворня (АЕ) относительно контактного датчика (SU);
b) установки вручную, по меньшей мере, одного контактного датчика (SU) во втором месте, которое выбирают в зависимости от профилей поперечного сечения стенки (РА) и упомянутых возможных габаритных размеров и условий эксплуатации шкворня (АЕ), затем проведения анализа при помощи каждого установленного вручную контактного датчика (SU) второго выбранного участка упомянутой стенки (РА) во втором выбранном угловом секторе, ориентированном во втором направлении, противоположном упомянутому первому направлению, для получения других результатов анализа для различных относительных угловых положений упомянутого шкворня (АЕ) относительно контактного датчика (SU);
c) составления из полученных упомянутых результатов анализа карт, на которых отображены поперечные и продольные направленности и положения индикаций отраженных сигналов внутри упомянутой стенки (РА).
2. Способ по п.1, отличающийся тем, что осуществляют первый раз этапы а)-с) путем размещения вручную каждого ультразвукового контактного датчика (SU) на внешней поверхности (SE) упомянутой стенки (РА) для составления карт, отображающих положения и направленности индикаций отраженных сигналов внутри упомянутой стенки (РА); затем выполняются второй раз, по меньшей мере, этапы а) и с) путем размещения вручную, по меньшей мере, одного ультразвукового контактного датчика (SU) на внутренней поверхности (SI) упомянутой стенки (РА) в третьем месте, которое выбирают в зависимости от ее профилей поперечного сечения, а затем исследуют при помощи каждого контактного датчика (SU) третий выбранный участок упомянутой стенки (РА) в третьем выбранном угловом секторе, ориентированном, по меньшей мере, в одном выбранном продольном или поперечном направлении, для получения результатов анализа для различных относительных угловых положений шкворня (АЕ) относительно контактного датчика (SU) и составляют карты, отображающие положения и направленности индикаций отраженных сигналов внутри упомянутой стенки (РА).
3. Способ по любому из пп.1 или 2, отличающийся тем, что этапы а)-с) осуществляют, по меньшей мере, один раз путем размещения вручную каждого ультразвукового контактного датчика (SU) на внешней (SE) или внутренней (SI) поверхности упомянутой стенки (РА) для проведения ультразвукового анализа в угловом секторе, ориентированном в продольном направлении, и таким образом составляют карты, отображающие поперечные направленности и положения индикаций отраженных сигналов внутри упомянутой стенки (РА), затем повторно выполняют также, по меньшей мере, один раз этапы а)-с) путем размещения вручную, по меньшей мере, одного ультразвукового контактного датчика (SU) на внешней (SE) или внутренней (SI) упомянутой поверхности стенки (РА) для выполнения ультразвукового анализа в угловом секторе, ориентированном в поперечном направлении, и таким образом составляют карты, отображающие продольные направленности и положения индикаций отраженных сигналов внутри упомянутой стенки (РА).
4. Способ по п.1, отличающийся тем, что после выполнения этапа с) предусматривают этап d), в ходе которого проводят анализ, по меньшей мере, внешней (SE) поверхности упомянутой стенки (РА) посредством другой технологии анализа, отличающейся от технологии, базирующейся на ультразвуковых колебаниях, для получения результатов анализа для различных относительных угловых положений, по меньшей мере, одного контактного датчика (SU) относительно упомянутого шкворня (АЕ).
5. Способ по п.4, отличающийся тем, что после выполнения этапа d) предусматривают этап е), в ходе которого на основании этих полученных результатов анализа составляют карты, отображающие положения и направленности индикаций поверхности упомянутой стенки (РА).
6. Способ по п.4 или 5, отличающийся тем, что упомянутую другую технологию анализа выбирают из группы, содержащей технологию так называемого потока рассеяния и технологию так называемых вихревых токов.
7. Способ по п.1, отличающийся тем, что после выполнения этапа с) предусматривают этап d), в ходе которого проводят анализ, по меньшей мере, одной внешней (SE) поверхности упомянутой стенки (РА) с использованием технологии так называемой проверки намагниченными частицами (или MPI) для получения результатов анализа поверхности для различных относительных угловых положений упомянутого шкворня (АЕ) относительно контактного датчика (SU).
8. Способ по п.1, отличающийся тем, что проводят анализ каждого из первых, вторых и возможно третьих участков упомянутой стенки путем относительного продольного перемещения, по меньшей мере, одного контактного датчика (SU) относительно упомянутого шкворня (АЕ) и/или путем электронного сканирования посредством, по меньшей мере, одного контактного датчика (SU).
9. Способ по п.1, отличающийся тем, что в процессе, по меньшей мере, одного из этапов а), b) и d) достигают различных относительных угловых положений упомянутого шкворня (АЕ) относительно каждого контактного датчика (SU), приводя вручную во вращение каждый контактный датчик (SU) относительно упомянутого шкворня (АЕ).
10. Способ по п.1, отличающийся тем, что он содержит этап f), в ходе которого проводят сравнение данных карт, полученных на этапе с), с данными первых эталонных карт, которые были сняты на первом эталонном шкворне такого же типа, что и контролируемый, но не имеющем изъянов, для получения только данных, содержащих индикации отраженных сигналов, которые не представлены в упомянутых первых эталонных картах, и составления таким образом корригированных карт.
11. Способ по п.1, отличающийся тем, что он содержит этап g), в ходе которого проводят сравнение данных карт, полученных на этапе с) или f), с данными вторых эталонных карт, которые были сняты на втором эталонном шкворне такого же типа, что и контролируемый, но имеющем известные изъяны, для получения только данных, содержащих индикации отраженных сигналов с известными изъянами, которые были представлены во вторых упомянутых эталонных картах, и составления таким образом карт изъянов.
12. Способ по п.1, отличающийся тем, что он содержит этап h), в ходе которого проводят сравнение с выбранной амплитудой, имеющей пороговую величину, амплитуд с данными карт, которые были получены на этапе с) или f), для получения только данных, содержащих индикации отраженных сигналов, амплитуды которых выше упомянутой амплитуды, имеющей пороговую величину и сообщающей информацию о наличии изъянов, и составления таким образом карт изъянов.
13. Способ по п.12, отличающийся тем, что в случае выявления амплитуды, которая выше упомянутой амплитуды, имеющей пороговую величину, вырабатывают сигнал о нарушении.
14. Способ по п.1, отличающийся тем, что он содержит этап i), в ходе которого на экран (ЕС) дисплея выводят, по меньшей мере, одну карту.
15. Способ по п.1, отличающийся тем, что используют контактные датчики (SU), выполненные с возможностью излучения ультразвуковых колебаний только в одном направлении с переменным углом.
16. Способ по п.15, отличающийся тем, что упомянутый угол меняется от приблизительно 0° до приблизительно 70° относительно продольного или поперечного направления.
17. Способ по п.1, отличающийся тем, что используют контактные датчики (SU) типа так называемой фазированной решетки, выполненные с возможностью излучения ультразвуковых колебаний в направлениях, которые заключены в заданном угловом секторе.
18. Способ по п.17, отличающийся тем, что упомянутый угловой сектор составляет от приблизительно 0° до приблизительно 70° относительно продольного или поперечного направления.
19. Прибор для контроля шкворней оси, отличающийся тем, что он содержит: I) по меньшей мере, один ультразвуковой контактный датчик (SU), устанавливаемый для проведения анализа в выбранном угловом секторе выбранных участков стенки (РА), имеющей профили поперечного сечения с известными и переменными внешним и внутренним радиусами, полого шкворня оси (АЕ) и получения таким образом результатов анализа; II) средства контроля (МС), устанавливаемые для определения, в зависимости от упомянутых профилей поперечного сечения и возможных габаритных размеров и условий эксплуатации упомянутого шкворня, по меньшей мере, первого и, по меньшей мере, второго выбранных мест на внешней (SE) или внутренней (SI) поверхности стенки (РА), где вручную должен быть размещен каждый контактный датчик (SU) таким образом, чтобы он осуществлял анализ, по меньшей мере, первого и, по меньшей мере, второго выбранных участков упомянутой стенки (РА) соответственно, по меньшей мере, в первом и, по меньшей мере, во втором выбранных угловых секторах, ориентированных в первом и втором противоположных продольном или поперечном направлениях, и получал таким образом результаты анализа для различных относительных угловых положений упомянутого шкворня (АЕ) относительно него (SU) и III) средства обработки (МТ), устанавливаемые для составления на основании полученных результатов анализа карт, отображающих поперечные или продольные направленности и положения индикации отраженных сигналов внутри упомянутой стенки (РА).
20. Прибор по п.19, отличающийся тем, что упомянутые средства контроля (МС) устанавливаются для определения перед применением вручную на каждом контактном датчике (SU) первого перемещения относительно внешней (SE) поверхности упомянутой стенки (РА) для получения результатов анализа для различных относительных угловых положений упомянутого шкворня (АЕ) относительно контактного датчика (SU), затем для определения перед применением вручную, по меньшей мере, на одном контактном датчике (SU) второго перемещения относительно внутренней (SI) поверхности упомянутой стенки (РА) для проведения им анализа, по меньшей мере, третьего выбранного участка упомянутой стенки (РА), по меньшей мере, в третьем выбранном угловом секторе, ориентированном в выбранном продольном или поперечном направлении, и для получения им таким образом других результатов анализа для различных относительных угловых положений упомянутого шкворня (АЕ) относительно контактного датчика (SU), а также тем, что упомянутые средства обработки (МТ) устанавливаются для составления на основании упомянутых полученных результатов анализа карт, отображающих положения и направленности индикаций отраженных сигналов внутри упомянутой стенки (РА).
21. Прибор по любому из пп.19 или 20, отличающийся тем, что упомянутые средства контроля (МС) устанавливаются I) для определения перед применением вручную на каждом контактном датчике (SU) первого перемещения относительно внешней (SE) или внутренней (SI) поверхности упомянутой стенки (РА) для выполнения ультразвукового анализа в угловом секторе, ориентированном в продольном направлении, и для получения результатов анализа, на основании которых упомянутые средства обработки (МТ) составят карты, отображающие поперечные направленности и положения индикаций отраженных сигналов, а затем II) для определения перед применением вручную на каждом контактном датчике (SU), по меньшей мере, второго перемещения относительно внешней (SE) или внутренней (SI) поверхности упомянутой стенки (РА) для выполнения им ультразвукового анализа в угловом секторе, ориентированном в поперечном направлении, и для получения им результатов анализа, на основании которых упомянутые средства обработки (МТ) составят карты, отображающие продольные направленности и положения индикаций отраженных сигналов.
22. Прибор по п.19, отличающийся тем, что он содержит средства анализа поверхности, устанавливаемые для проведения анализа, по меньшей мере, внешней (SE) поверхности упомянутой стенки (РА) путем другой технологии анализа, отличающейся от технологии, базирующейся на ультразвуковых колебаниях, для получения результатов анализа для различных относительных положений упомянутого шкворня (АЕ) относительно каждого контактного датчика (SU).
23. Прибор по п.22, отличающийся тем, что упомянутые средства обработки (МТ) устанавливаются для составления на основании упомянутых результатов анализа, полученных посредством упомянутых средств анализа поверхности (MAS), карт, отображающих положения и направленности индикаций поверхности упомянутой стенки (РА).
24. Прибор по любому из пп.22 или 23, отличающийся тем, что упомянутые средства анализа поверхности выбираются в группе, содержащей средства анализа потока рассеяния и средства анализа методом вихревых токов.
25. Прибор по п.19, отличающийся тем, что он содержит средства анализа поверхности, устанавливаемые для выполнения анализа, по меньшей мере, внешней (SE) поверхности упомянутой стенки (РА) путем проверки намагниченными частицами (или MPI) для получения результатов анализа поверхности для различных относительных угловых положений упомянутого шкворня (АЕ) относительно упомянутых контактных датчиков (SU).
26. Прибор по п.19, отличающийся тем, что упомянутые средства контроля (МС) устанавливаются для осуществления электронного сканирования посредством, по меньшей мере, одного контактного датчика (SU) для выполнения им анализа части, по меньшей мере, упомянутых первых, вторых и возможно третьих участков упомянутой стенки (РА).
27. Прибор по п.19, отличающийся тем, что упомянутые средства обработки (МТ) устанавливаются для осуществления сравнения данных карт, снятых с упомянутого контролируемого шкворня (АЕ), с данными первых эталонных карт, которые были получены на первом эталонном шкворне такого же типа, что и контролируемый, но не имеющем изъянов, для сохранения только данных, содержащих индикации отраженных сигналов, которые не представлены в упомянутых первых эталонных картах, и составления таким образом корригированных карт.
28. Прибор по п.19, отличающийся тем, что упомянутые средства обработки (МТ) устанавливаются для осуществления сравнения данных карт, полученных на упомянутом контролируемом шкворне (АЕ), с данными вторых эталонных карт, которые были сняты со второго эталонного шкворня такого же типа, что и контролируемый, но имеющем известные изъяны, и для сохранения только данных, содержащих индикации отраженных сигналов с известными изъянами, которые были представлены в упомянутых вторых эталонных картах, и составления таким образом карт изъянов.
29. Прибор по п.19, отличающийся тем, что упомянутые средства обработки (МТ) устанавливаются для проведения сравнения с выбранной амплитудой, имеющей пороговую величину, амплитуд с данными карт, которые были получены на упомянутом контролируемом шкворне (АЕ), и сохранения только данных, содержащих индикации отраженных сигналов, амплитуды которых выше имеющей пороговую величину упомянутой амплитуды, и сообщающих информацию о наличии изъянов, и составления таким образом карт изъянов.
30. Прибор по п.29, отличающийся тем, что упомянутые средства обработки (МТ) устанавливаются для выработки сигнала о нарушении в случае определения амплитуды, которая выше амплитуды, имеющей пороговую величину.
31. Прибор по п.19, отличающийся тем, что он содержит экран (ЕС) дисплея, предназначенный для выведения на него, по меньшей мере, некоторых упомянутых карт, составленных упомянутыми средствами обработки (МТ).
32. Прибор по п.19, отличающийся тем, что каждый контактный датчик (SU) предназначен для излучения ультразвуковых колебаний только в одном направлении с переменным углом.
33. Прибор по п.32, отличающийся тем, что упомянутый угол меняется от приблизительно 0° до приблизительно 70° относительно продольного или поперечного направления.
34. Прибор по п.19, отличающийся тем, что каждый контактный датчик (SU) относится к типу фазированной решетки и предназначен для излучения ультразвуковых колебаний в направлениях, которые заключены в выбранном угловом секторе.
35. Прибор по п.34, отличающийся тем, что упомянутый угловой сектор заключен в диапазоне от приблизительно 0° до приблизительно 70° относительно продольного или поперечного направления.
| JP 2005283379 A, 13.10.2005 | |||
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ОСЕЙ КОЛЕСНЫХ ПАР | 2006 |
|
RU2313784C1 |
| СПОСОБ ЭХО-ИМПУЛЬСПОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯИЗДЕЛИЙ | 0 |
|
SU165000A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ, ИМЕЮЩИХ СЛОЖНУЮ ФОРМУ ТЕЛ ВРАЩЕНИЯ | 1993 |
|
RU2086975C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ, ИМЕЮЩИХ СЛОЖНУЮ ФОРМУ ТЕЛ ВРАЩЕНИЯ С НАЛИЧИЕМ НАПРЕССОВАННЫХ ДЕТАЛЕЙ | 1993 |
|
RU2084889C1 |
| JP 11023540 A, 29.01.1999 | |||
| JP 2002082099 A, 22.03.2002 | |||
| JP 55136952 A, 25.10.1980. | |||

