Объектом изобретения является латерационный способ радиолокации объектов - источников радиосигнала, находящихся на дорожной сети. Предлагаемый способ относится к области радиолокации и радионавигации, поскольку класс задач такого типа лежит в основе определения оценок местоположения объектов.
Известен способ радиолокации объектов - источников радиосигнала на плоскости [1], заключающийся в измерении дальностей от объекта - источника радиосигнала в двух разнесенных в пространстве измерительных пунктах, положение которых известно, определении координат местоположения объекта как точки пересечения линий положения, соответствующих полученным дальностям. Его недостатком является повышенная сложность реализации, связанная с необходимость использования двух разнесенных в пространстве измерительных пунктов (дальномеров), связанных между собой информационным каналом, и низкая точность, обусловленная отсутствием учета топологии дорожной сети и, как следствие, возможностью появления ложных оценок координат местоположения, предполагающих нахождение объекта вне дорожной сети.
Известен также способ однопозиционной радиолокации подвижных объектов на дорожной сети [2], заключающийся в измерении угла прихода электромагнитной волны (пеленга) от объекта из одного измерительного пункта, положение которого известно, измерении на объекте скорости его перемещения вдоль элемента дорожной сети, кодировании сигнала, пропорционального измеренной скорости, передаче полученного кода по радиоканалу передачи данных на измерительный пункт, декодировании полученного значения измеренной скорости, повторном через интервал времени Δt измерении пеленга объекта, определении длины пути Δе, пройденного за время Δt, определении значений натурального параметра, соответствующих точкам пересечения линии положения для первого измеренного пеленга и элементов дорожной сети, определении для каждого из этих элементов возможных значений пеленгов, соответствующих перемещению объекта на расстояние Δе, определении из условия минимального рассогласования между ними и повторно измеренным пеленгом номера элемента дорожной сети, на котором находится объект, определении координат местоположения объекта как координат точки пересечения линии положения, соответствующей измеренному пеленгу и определенного элемента дорожной сети.
Приведенный способ хотя и ориентирован на использование только одного измерительного пункта, однако для обеспечения высоких точностных характеристик измерений требует использования на нем антенной системы с узкой диаграммой направленности. Указанный фактор существенно усложняет его реализацию. Кроме того в силу неограниченности линии положения, соответствующей измеренному пеленгу, количество ее пересечений с элементами дорожной сети может оказаться достаточно большим. Это ведет к увеличению трудоемкости при реализации приведенного способа
Известен также способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети [3], заключающийся в измерении в различные моменты времени из одного измерительного пункта, положение которого известно, углов прихода электромагнитной волны (пеленгов) αизм(t), αизм(t+Δt) по сигналам, излучаемым источником радиосигнала и содержащим его опознавательный код, одновременно с излучением сигнала в момент времени t+Δt на подвижном источнике радиосигнала измеряют длину пути, пройденного им за время Δt вдоль элемента дорожной сети, сигнал, пропорциональный измеренной длине пути, кодируют и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренной длины пути Δе за время Δt, по измеренному пеленгу αизм(t) и параметрическим моделям пеленга αi(е),  заданным в функции натурального параметра для каждого элемента дорожной сети, определяют значения натурального параметра
заданным в функции натурального параметра для каждого элемента дорожной сети, определяют значения натурального параметра  , соответствующие точкам пересечения линии положения для измеренного пеленга αизм(t) и элементов дорожной сети, для каждого из этих элементов определяют расчетные значения пеленгов
, соответствующие точкам пересечения линии положения для измеренного пеленга αизм(t) и элементов дорожной сети, для каждого из этих элементов определяют расчетные значения пеленгов  соответствующие перемещению подвижного источника радиосигнала на расстояние Δе, и из условия минимального рассогласования между ними и повторно измеренным пеленгом αизм(t+Δt) определяют номера элементов дорожной сети, на которых может находиться подвижный источник радиосигнала, одновременно с излучением сигнала в момент времени t на подвижном источнике радиосигнала измеряют угол наклона касательной к элементу дорожной сети θизм, на котором находится источник радиосигнала, сигнал, пропорциональный измеренному углу, кодируют и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренного угла, по параметрическим моделям угла наклона касательных к элементам дорожной сети θi(е),
соответствующие перемещению подвижного источника радиосигнала на расстояние Δе, и из условия минимального рассогласования между ними и повторно измеренным пеленгом αизм(t+Δt) определяют номера элементов дорожной сети, на которых может находиться подвижный источник радиосигнала, одновременно с излучением сигнала в момент времени t на подвижном источнике радиосигнала измеряют угол наклона касательной к элементу дорожной сети θизм, на котором находится источник радиосигнала, сигнал, пропорциональный измеренному углу, кодируют и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренного угла, по параметрическим моделям угла наклона касательных к элементам дорожной сети θi(е),  , заданным в функции натурального параметра и значениям натурального параметра
, заданным в функции натурального параметра и значениям натурального параметра  , соответствующим точкам пересечения линии положения для измеренного пеленга αизм(t) и элементов дорожной сети, для каждого элемента дорожной сети определяют расчетные значения углов наклона
, соответствующим точкам пересечения линии положения для измеренного пеленга αизм(t) и элементов дорожной сети, для каждого элемента дорожной сети определяют расчетные значения углов наклона  и из условия минимального рассогласования между ними и измеренным углом
и из условия минимального рассогласования между ними и измеренным углом  определяют номера элементов дорожной сети, на которых может находиться источник радиосигнала, из сравнения этих номеров с номерами, полученными из условия минимального рассогласования между расчетными значениями пеленгов и повторно измеренным пеленгом определяют номер элемента дорожной сети, на котором находится подвижный источник радиосигнала, координаты местоположения подвижного источника радиосигнала определяют как координаты точки пересечения линии положения, соответствующей измеренному пеленгу (αизм(t) или αизм(t+Δt)) и элемента дорожной сети, на котором находится подвижный источник радиосигнала.
определяют номера элементов дорожной сети, на которых может находиться источник радиосигнала, из сравнения этих номеров с номерами, полученными из условия минимального рассогласования между расчетными значениями пеленгов и повторно измеренным пеленгом определяют номер элемента дорожной сети, на котором находится подвижный источник радиосигнала, координаты местоположения подвижного источника радиосигнала определяют как координаты точки пересечения линии положения, соответствующей измеренному пеленгу (αизм(t) или αизм(t+Δt)) и элемента дорожной сети, на котором находится подвижный источник радиосигнала.
Приведенный способ, как и предыдущий, ориентирован на использование только одного измерительного пункта, однако для обеспечения высоких точностных характеристик измерений также требует использования на нем антенной системы с узкой диаграммой направленности. Это существенно усложняет его реализацию. Как и в предыдущем способе в силу неограниченности линии положения, соответствующей измеренному пеленгу, количество ее пересечений с элементами дорожной сети может оказаться достаточно большим. Это влечет за собой увеличение трудоемкости при реализации.
Цель изобретения:
1. Исключение необходимости использования антенных систем с узкой диаграммой направленности для повышения точности определения координат местоположения объекта - источника радиосигнала, находящегося на дорожной сети, при сохранении однопозиционного принципа измерений на основе двукратного использования беззапросного метода измерения дальности.
2. Сокращение количества элементов дорожной сети, подлежащих анализу, за счет учета только тех элементов, которые пересекают окружность, образованную линией положения, связанной с измеренной дальностью, или касаются ее.
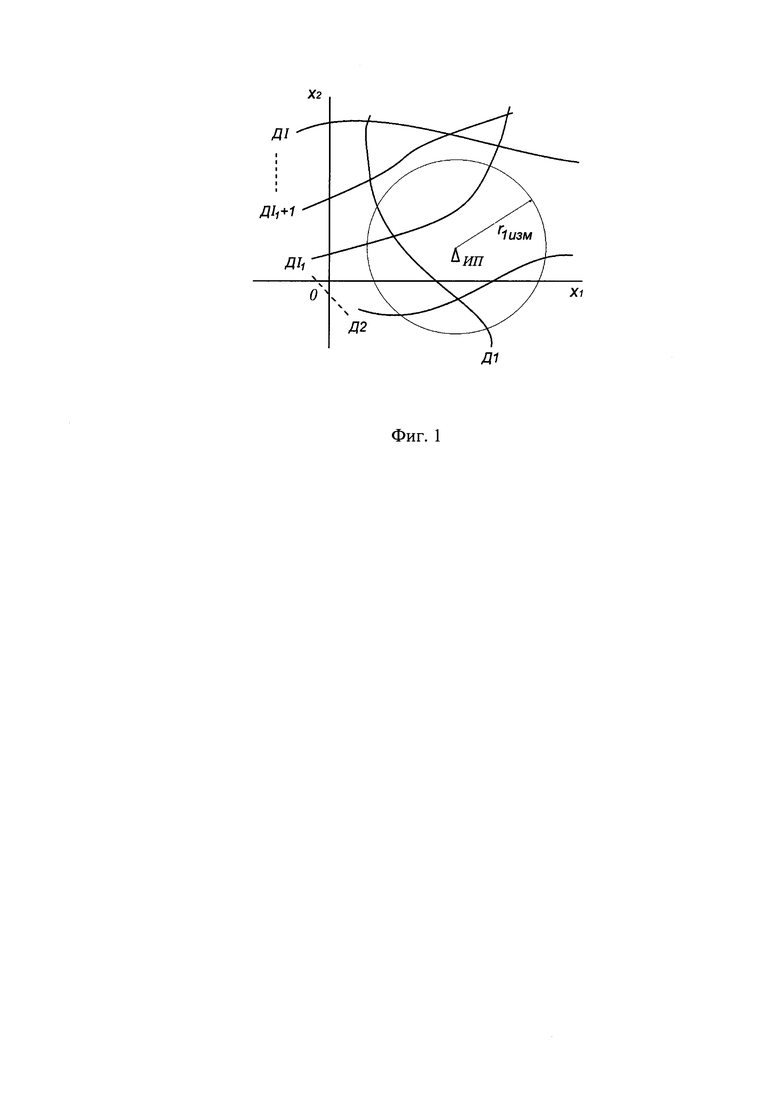
Сущность изобретения состоит в следующем. Каждый элемент дорожной сети пересекающий линию положения, соответствующую измерению  или касающийся ее (Фиг. 1), описывается параметрической зависимостью
или касающийся ее (Фиг. 1), описывается параметрической зависимостью

где I1<I, I1 - количество элементов дорожной сети пересекающих линию положения, соответствующую измерению или касающихся ее; I - общее количество элементов дорожной сети; е - имеет смысл натурального параметра или длины пути [4-7].
К форме (1) можно приближенно перейти, если описание элементов дорожной сети задано в виде массивов

используемых, в частности, при формировании электронных карта. В этом случае

где

Из (2), (3) следует дискретный аналог

на основании которого возможно приближенное представление (1).
Для каждого элемента дорожной сети  заранее рассчитывают:
заранее рассчитывают:
- зависимость значений дальности от натурального параметра

где  - координаты измерительного пункта;
- координаты измерительного пункта;
- зависимость значений угла наклона касательной к элементу дорожной сети от натурального параметра

где  .
.
Соотношения (6), (7) составляют преобразованные априорные данные о структуре дорожной сети. Отметим, что характеристики (6), (7) в совокупности являются уникальными и каждая их пара описывает соответствующий элемент дорожной сети.
Проводимые измерения:
-  - задержки прихода электромагнитных волн по сигналам, излучаемым источником радиосигнала в моменты времени t, t+Δt, (моменты t, t+Δt излучения сигналов с объекта на измерительном пункте полагаются известными), определяемые из одной пространственной точки, в которой расположен измерительный пункт;
- задержки прихода электромагнитных волн по сигналам, излучаемым источником радиосигнала в моменты времени t, t+Δt, (моменты t, t+Δt излучения сигналов с объекта на измерительном пункте полагаются известными), определяемые из одной пространственной точки, в которой расположен измерительный пункт;
-  дальности, соответствующие задержкам
дальности, соответствующие задержкам  (косвенные измерения)
(косвенные измерения)
- Δе - длина пройденного источником радиосигнала пути вдоль элемента дорожной сети, на котором он находится, в течение интервала времени Δt (требование постоянства скорости перемещения исключается);
- θизм - угол наклона касательной к элементу дорожной сети, на котором находится объект в момент времени t (угол наклона продольной оси объекта, направленной вдоль касательной к элементу дорожной сети). Значение θизм на Δt, полагается неизменным.
Отметим, что задержки  и следующие из них дальности
и следующие из них дальности  определяют на измерительном пункте по сигналам, излучаемым объектом, и содержащим его опознавательный код. Длину Δе пройденного источником радиосигнала пути в момент времени t+Δt и угол наклона касательной θизм к элементу дорожной сети в момент времени t определяют на объекте, пропорциональные им сигналы, кодируют, полученные коды передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования определяют значения длины пройденного источником радиосигнала пути и угла наклона касательной к элементу дорожной сети.
определяют на измерительном пункте по сигналам, излучаемым объектом, и содержащим его опознавательный код. Длину Δе пройденного источником радиосигнала пути в момент времени t+Δt и угол наклона касательной θизм к элементу дорожной сети в момент времени t определяют на объекте, пропорциональные им сигналы, кодируют, полученные коды передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования определяют значения длины пройденного источником радиосигнала пути и угла наклона касательной к элементу дорожной сети.
По измеренной дальности  из решения уравнений
из решения уравнений

где I1<I, I1 - количество элементов дорожной сети, пересекающих окружность радиуса или касающихся ее,
для элементов дорожной сети определяют множество корней
 соответствующих множеству оценок возможного местоположения объекта
соответствующих множеству оценок возможного местоположения объекта

где  Ki - количество точек пересечения и (или) касания линии положения, соответствующей измерению , i - го элемента дорожной сети.
Ki - количество точек пересечения и (или) касания линии положения, соответствующей измерению , i - го элемента дорожной сети.
Координаты (10) определяют точки пересечения линии положения дальномера, соответствующей дальности , и элементов дорожной сети (Фиг. 1). После кодирования сигналов, пропорциональных Δе и θизм, передачи полученных кодов по радиоканалу передачи данных от объекта на измерительный пункт, приема и декодирования сигнала определяют:
- множество возможных значений дальностей, соответствующих моменту времени t+Δt

- множество возможных значений углов наклона касательных к элементам дорожной сети

в точках пересечения линии положения, соответствующей , с указанными элементами.
В большинстве случаев значения (11), (12) для различных элементов дорожной сети отличаются друг от друга. Если для двух или более элементов дорожной сети значения (11) совпадают, то для этих же элементов различными будут значения углов наклона (12).
Покажем это. Предположим, что отрезки участков элементов дорожной сети, лежащие между линиями положения, соответствующими измерениям , с высокой степенью точности можно аппроксимировать линейными моделями. Рассмотрим отрезок CF участка дорожной сети Дi на Фиг. 2. Его длина равна Δе, а угол наклона α1. Если предположить, что подвижный источник радиосигнала находится в точке С на Дi, то может найтись другой участок элемента дорожной сети СK с такой же длиной Δе, однако угол его наклона будет равен уже α2. В этом случае при совместном измерении Δе и θизм=α1 неоднозначности не возникает.
Покажем, когда такая неоднозначность возможна. Для этого проведем через точки С и F две параллельные прямые перпендикулярные CF и определим точки В, Е пересечения указанных прямых с линиями положения. Отрезок BE имеет такую же длину и такой же угол наклона, как и CF. Таким образом, если в составе дорожной сети находится два элемента, отрезки которых совпадают с BE и CF, то их различить по измерениям Δе и θизм на представляется возможным.
В рассмотренных условиях возможна двузначность в определении номера элемента дорожной сети. Уйти от нее возможно лишь используя априорную информацию. Необходимо отметить, что возникновение такой двузначности крайне маловероятно.
Принятие решения о местоположении объекта осуществляют в результате сравнения для каждого элемента дорожной сети расчетных значений дальностей, определяемых из (11), и измеренного значения дальности  идентифицированного по опознавательному коду с объектом, расчетных углов наклона касательных к элементам дорожной сети, определяемых из (12) и измеренного значения θизм угла наклона касательной к элементу дорожной сети, на котором находится объект. Для этого определяют
идентифицированного по опознавательному коду с объектом, расчетных углов наклона касательных к элементам дорожной сети, определяемых из (12) и измеренного значения θизм угла наклона касательной к элементу дорожной сети, на котором находится объект. Для этого определяют

где 1≤q≤I1

где 1≤u≤I1, q+u≤I1+2.
При выполнении условий u=1, q=1 элементы дорожной сети являются различимыми как по дальностям, так и по углам наклона касательных к этим элементам.
Выполнение условия

подразумевает наличие для t+Δt в заданной конфигурации дорожной сети q ее элементов, для которых расчетные значения дальностей являются одинаковыми, а квадраты их отклонений от измеренного значения пеленга - наименьшими для всей совокупности из  квадратов отклонений.
квадратов отклонений.
Выполнение условия

подразумевает наличие в заданной конфигурации дорожной сети u ее элементов, для которых значения углов наклона касательных для t1 являются одинаковыми, а квадраты их отклонений от измеренного значения угла наклона касательной к элементу дорожной сети, на котором находится объект, являются наименьшими для всей совокупности из  квадратов отклонений.
квадратов отклонений.
Определение совпадающих элементов множеств  и
и  осуществляют с помощью соотношения
осуществляют с помощью соотношения

где  - вектор-строки; операция о соответствует матричному произведению Адамара, или поэлементному произведению wr, wθ; элементы векторов wr, wθ равны нулю за исключением элементов соответственно
- вектор-строки; операция о соответствует матричному произведению Адамара, или поэлементному произведению wr, wθ; элементы векторов wr, wθ равны нулю за исключением элементов соответственно  и
и , J1=[10…0], J2=[01…0], …,
, J1=[10…0], J2=[01…0], …, 
Например, если I1=5, q=2, r=4, и

то

Множества (19) имеют один общий элемент, очевидно определяемый из (17), т.е. 
Таким образом, оценку местоположения объекта определяют как

В множествах  и
и  может содержаться не более двух общих элементов, которые могут привести к двум оценкам местоположения
может содержаться не более двух общих элементов, которые могут привести к двум оценкам местоположения  и
и  . Выбор между
. Выбор между  и
и  осуществляют, исходя из анализа априорной информации.
осуществляют, исходя из анализа априорной информации.
Необходимо отметить, что автономные измерения (измерения Δе и θизм) с последующим кодированием сигналов, пропорциональных Δе и θизм, передачей полученных кодов по радиоканалу передачи данных на измерительный пункт носят фрагментарный характер. Их проводят лишь в начале процесса сопровождения объекта и после того как объект минует какую-либо точку пересечения элементов дорожной сети. Как только задача различения оказывается решенной (определен элемент дорожной сети, на котором находится объект), дальнейшее сопровождение может проводиться лишь по результатам измерений дальности.
Сравнительный анализ заявляемого способа и известного способа локации местоположения объекта на плоскости.
1. В заявляемом способе сохраняется однопозиционный принцип измерения.
2. Заявляемый способ реализуется на основе двукратного использования беззапросного метода измерения дальности.
Технический эффект от применения предлагаемого способа по сравнению со способом-прототипом
1. Использование латерационного подхода дает возможность за счет структуры соответствующих ему линий положения существенно сократить по сравнению с угломерным способом количество анализируемых элементов дорожной сети (см. Фиг. 1).
2. Использование дальномерного принципа не требует для своей реализации антенн с узкой диаграммой направленности и позволяет ограничиться применением гораздо более простых и дешевых антенных систем.
Структурная схема устройства, реализующего способ однопозиционной радиолокации подвижных объектов на дорожной сети, представлена на Фигуре 3.
На Фигуре 3 использованы следующие обозначения: 1 - подвижный объект, включающий 11 - блок измерения длины пройденного пути (спидометр), 12 - блок кодирования и передачи радиосигналов, 13 - блок измерения угла наклона касательной к элементу дорожной сети (гирокомпас, электронный компас); 2 - блок приема радиосигналов и декодирования, 21 - блок определения по измеренным значениям задержек соответствующих им оценок дальностей измеритель дальности; 3 - блок определения значений натурального параметра, для точек пересечения линии положения, соответствующей , и элементов дорожной сети; 4 - блок суммирования; 5 - блок определения расчетных значений дальности; 6 - блок сравнения расчетных значений дальности с измеренным значением дальности ; 7 - блок определения расчетных значений углов наклона касательных к элементам дорожной сети в точках их пересечения с линией положения, соответствующей 8 - блок сравнения расчетных значений углов наклона касательных к элементам дорожной сети с измеренным углом  9 - блок выбора значения натурального параметра; 10 - блок определения номера элемента дорожной сети; 11 блок оценки координат местоположения объекта.
9 - блок выбора значения натурального параметра; 10 - блок определения номера элемента дорожной сети; 11 блок оценки координат местоположения объекта.
На объекте 1 в блоке 11 в момент времени t осуществляют измерение угла наклона касательной к элементу дорожной сети, а в блоке 13 в момент времени t+Δt проводят измерение длины пути, пройденного подвижным источником радиосигнала вдоль элемента дорожной сети за Δt. Результат измерений с выходов блоков 11, 13 передают на входы 121, 122 соответственно блока кодирования и передачи радиосигналов 12. Далее с выхода блока 12 радиосигналы, содержащие код угла наклона касательной к элементу дорожной сети и код объекта, код длины пройденного пути и код объекта, по радиоканалу передачи данных передают на вход блока 2 приема радиосигналов и декодирования. Блок 12 обеспечивает излучение радиосигналов, привязанных к моментам времени t и t+Δt, известным на приемной стороне. В блоке 2 на основании обработки с учетом опознавательного кода объекта осуществляют выделение сигналов, пропорциональных измеренному на объекте углу наклона касательной к элементу дорожной сети, соответствующего моменту времени t и длины пройденного пути, соответствующей моменту времени t+Δt, определяют значения задержек сигналов  по которым в блоке 21 формируются оценки дальностей
по которым в блоке 21 формируются оценки дальностей  Сигнал, пропорциональный
Сигнал, пропорциональный  , с выхода 212 подают на вход блока 3 определения значений натурального параметра, для точек пересечения линии положения пеленгатора, соответствующей , и элементов дорожной сети. Функционирование бока 3 осуществляется в соответствии с (6), (8), (9). Сигнал, пропорциональный оценке Δе длины пройденного за Δt пути с выхода 21 блока 2 подают на вход 40 блока 4 суммирования. В блоке 4 оценку длины пройденного пути суммируют со значениями натурального параметра, которые с выходов 31…3J блока 3 подают на входы 41…4J блока 4. Значения натуральных параметров для каждого элемента дорожной сети с выходов 4J+1…42J поступают соответственно на входы 51…5J блока 5 определения расчетных значений дальности. Возможные для каждого элемента дорожной сети значения дальности для t+Δt рассчитывают в соответствии с (6), (11). Указанные значения с выходов 5J+1…52J блока 5 поступают на входы 61…6J блока 6 сравнения. В блоке 6 рассчитанные для каждого элемента дорожной сети значения дальности сравнивают с измеренным значением дальности до объекта, соответствующего установленному опознавательному коду, поступающим на вход 60 блока 6 с выхода 211 блока 21. Сравнение осуществляют в соответствии с правилом (13). Его результатом являются сигналы на выходах
, с выхода 212 подают на вход блока 3 определения значений натурального параметра, для точек пересечения линии положения пеленгатора, соответствующей , и элементов дорожной сети. Функционирование бока 3 осуществляется в соответствии с (6), (8), (9). Сигнал, пропорциональный оценке Δе длины пройденного за Δt пути с выхода 21 блока 2 подают на вход 40 блока 4 суммирования. В блоке 4 оценку длины пройденного пути суммируют со значениями натурального параметра, которые с выходов 31…3J блока 3 подают на входы 41…4J блока 4. Значения натуральных параметров для каждого элемента дорожной сети с выходов 4J+1…42J поступают соответственно на входы 51…5J блока 5 определения расчетных значений дальности. Возможные для каждого элемента дорожной сети значения дальности для t+Δt рассчитывают в соответствии с (6), (11). Указанные значения с выходов 5J+1…52J блока 5 поступают на входы 61…6J блока 6 сравнения. В блоке 6 рассчитанные для каждого элемента дорожной сети значения дальности сравнивают с измеренным значением дальности до объекта, соответствующего установленному опознавательному коду, поступающим на вход 60 блока 6 с выхода 211 блока 21. Сравнение осуществляют в соответствии с правилом (13). Его результатом являются сигналы на выходах  Сигнал на каждом i - м выходе 6J+i
Сигнал на каждом i - м выходе 6J+i  либо пропорционален индексу i элемента дорожной сети, если индекс входит в множество (13), определяющее индексы элементов дорожной сети, для которых расчетные значения пеленгов являются одинаковыми, а квадраты их отклонений от измеренного значения пеленга - наименьшими для всей совокупности из I1 квадратов отклонений, либо равны нулю в противном случае.
либо пропорционален индексу i элемента дорожной сети, если индекс входит в множество (13), определяющее индексы элементов дорожной сети, для которых расчетные значения пеленгов являются одинаковыми, а квадраты их отклонений от измеренного значения пеленга - наименьшими для всей совокупности из I1 квадратов отклонений, либо равны нулю в противном случае.
Значения натурального параметра с выходов 31…3J блока 3 подают на входы 71, …, 7J блока 7 определения расчетных значений углов. Определенные в блоке 7 расчетные значения углов наклона касательных к элементам дорожной сети с его выходов 7J+1, …, 72J поступают на входы 81, …, 8J блока сравнения 8. В блоке 8 рассчитанные для каждого элемента дорожной сети значения угла наклона касательной сравниваются с измеренным значением угла  поступающим на вход 80 блока 8 с выхода 22 блока 2. Сравнение осуществляют в соответствии с правилом (14). Его результатом являются сигналы на выходах
поступающим на вход 80 блока 8 с выхода 22 блока 2. Сравнение осуществляют в соответствии с правилом (14). Его результатом являются сигналы на выходах  Сигнал на каждом i - м выходе 8J+i
Сигнал на каждом i - м выходе 8J+i  либо пропорционален индексу i элемента дорожной сети, если индекс входит в множество (14), определяющее индексы элементов дорожной сети, для которых расчетные значения углов являются одинаковыми, а квадраты их отклонений от измеренного значения пеленга - наименьшими для всей совокупности из I квадратов отклонений, либо равны нулю в противном случае. Сигналы с выходов блока 8 и выходов
либо пропорционален индексу i элемента дорожной сети, если индекс входит в множество (14), определяющее индексы элементов дорожной сети, для которых расчетные значения углов являются одинаковыми, а квадраты их отклонений от измеренного значения пеленга - наименьшими для всей совокупности из I квадратов отклонений, либо равны нулю в противном случае. Сигналы с выходов блока 8 и выходов  блока 6 подаются соответственно на входы
блока 6 подаются соответственно на входы  и
и  блока 10. Определение номера элемента дорожной сети в блоке 10 осуществляется в соответствии с (17). Сигнал пропорциональный номеру элемента дорожной сети с выхода блока 10 поступает на вход 90 блока 9 и вход 112 блока 11. В блоке 9 из значений натурального параметра, поступающих на входы 91…9J с выходов 31…3J блока 3, проводят выбор такого его значения, которое соответствует определенному в блоке 10 индексу. Сигнал, пропорциональный выбранному значению натурального параметра с выхода блока 9 поступает на вход 111 блока 11. В блоке 11 в соответствии с (20) проводят определение координат местоположения объекта.
блока 10. Определение номера элемента дорожной сети в блоке 10 осуществляется в соответствии с (17). Сигнал пропорциональный номеру элемента дорожной сети с выхода блока 10 поступает на вход 90 блока 9 и вход 112 блока 11. В блоке 9 из значений натурального параметра, поступающих на входы 91…9J с выходов 31…3J блока 3, проводят выбор такого его значения, которое соответствует определенному в блоке 10 индексу. Сигнал, пропорциональный выбранному значению натурального параметра с выхода блока 9 поступает на вход 111 блока 11. В блоке 11 в соответствии с (20) проводят определение координат местоположения объекта.
Источники информации
1. Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. М.: Радио и связь. 1986.
2. Патент 2524482 Российская Федерация, МПК G01S 5/00. Способ однопозиционной радиолокации подвижных объектов на дорожной сети / Хуторцев В.В., Бережная В.В., №2013130454; заявл. 02.07.2013; опубл. 27.07.2014.
3. Патент 2666553 Российская Федерация, МПК G01S 5/00. Способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети / Хуторцев В.В., №2017144163; заявл. 15.12.2017; опубл. 11.09.2018.
4. Дубровин Б.А., Новиков С.П., Фоменко А.Т. Современная геометрия: Методы и приложения. М.: Наука, 1986. 760 с.
5. Хуторцев В.В. Принципы пространственно-дифференциальной фильтрации параметров траекторий объектов, движущихся вдоль одномерных многообразий // Радиотехника и электроника. 1993. Т. 38. №6. С. 1026-1036.
6. Хуторцев В.В. Пространственно-дифференциальная фильтрация марковских процессов на одномерных стохастических многообразиях // Автоматика и телемеханика. 1994. Т. 8. №6. С. 117-125.
7. Хуторцев В.В. Принципы пространственно-дифференциальной адаптивной фильтрации марковских процессов на одномерных многообразиях // Радиотехника и электроника. 1994. Т. 39. №8. С. 1637-1646.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети | 2017 |
|
RU2666553C1 |
| СПОСОБ ОДНОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОСИГНАЛА НА ДОРОЖНОЙ СЕТИ | 2015 |
|
RU2572809C1 |
| СПОСОБ ОДНОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ НА ДОРОЖНОЙ СЕТИ | 2013 |
|
RU2524482C1 |
| Способ измерения параметров движения объекта активным локатором | 2020 |
|
RU2759199C1 |
| СПОСОБ РАДИОЛОКАЦИИ ОБЪЕКТОВ НА ДОРОЖНОЙ СЕТИ | 2014 |
|
RU2545526C1 |
| Устройство отождествления | 1991 |
|
SU1803910A1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППИРОВАНИЕМ НАБЛЮДЕНИЙ ПРИ ФИЛЬТРАЦИИ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2011 |
|
RU2453990C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2006 |
|
RU2327181C1 |
| Устройство обработки информации комплексной измерительной системы | 1990 |
|
SU1837283A1 |
Способ относится к радиолокации и радионавигации и предназначен для определения оценок местоположения подвижных источников радиосигнала (ИР) на дорожной сети. Достигаемый технический результат - повышение точности определения координат ИР на дорожной сети. Сущность изобретения заключается в том, что на одном измерительном пункте, положение которого известно, измеряют задержки прихода электромагнитных волн по сигналам, излучаемым ИР в определенные моменты времени, известные на измерительном пункте. По измеренным задержкам определяют измеренные дальности до ИР  Определяют те элементы дорожной сети, которые пересекают линию положения, соответствующую
Определяют те элементы дорожной сети, которые пересекают линию положения, соответствующую  , или касаются ее. По параметрическим моделям дальностей, заданным для этих элементов в функции натурального параметра, определяют значения натурального параметра, соответствующие точкам пересечения линии положения для дальности
, или касаются ее. По параметрическим моделям дальностей, заданным для этих элементов в функции натурального параметра, определяют значения натурального параметра, соответствующие точкам пересечения линии положения для дальности  и элементов дорожной сети. Для каждого из этих элементов рассчитывают значения дальностей, соответствующие перемещению подвижного ИР на соответствующее расстояние, и из условия минимального рассогласования между ними и измеренной дальностью
и элементов дорожной сети. Для каждого из этих элементов рассчитывают значения дальностей, соответствующие перемещению подвижного ИР на соответствующее расстояние, и из условия минимального рассогласования между ними и измеренной дальностью  определяют номера элементов дорожной сети, на которых может находиться подвижный источник ИР. По параметрическим моделям угла наклона касательных к элементам дорожной сети, заданным в функции натурального параметра, и значениям натурального параметра, соответствующим точкам пересечения линии положения для измеренной дальности
определяют номера элементов дорожной сети, на которых может находиться подвижный источник ИР. По параметрическим моделям угла наклона касательных к элементам дорожной сети, заданным в функции натурального параметра, и значениям натурального параметра, соответствующим точкам пересечения линии положения для измеренной дальности  и элементов дорожной сети, для каждого элемента дорожной сети определяют расчетные значения углов наклона. Из условия минимального рассогласования между ними и измеренным углом
и элементов дорожной сети, для каждого элемента дорожной сети определяют расчетные значения углов наклона. Из условия минимального рассогласования между ними и измеренным углом  определяют номера элементов дорожной сети, на которых может находиться ИР. Из сравнения этих номеров с номерами, полученными из условия минимального рассогласования между расчетными значениями дальностей и повторно измеренной дальностью, определяют номер элемента дорожной сети, на котором находится подвижный ИР. Координаты местоположения подвижного ИР определяют как координаты точки пересечения линии положения, соответствующей измеренной дальности
определяют номера элементов дорожной сети, на которых может находиться ИР. Из сравнения этих номеров с номерами, полученными из условия минимального рассогласования между расчетными значениями дальностей и повторно измеренной дальностью, определяют номер элемента дорожной сети, на котором находится подвижный ИР. Координаты местоположения подвижного ИР определяют как координаты точки пересечения линии положения, соответствующей измеренной дальности  или
или  элемента дорожной сети, на котором находится подвижный ИР. 3 ил.
элемента дорожной сети, на котором находится подвижный ИР. 3 ил.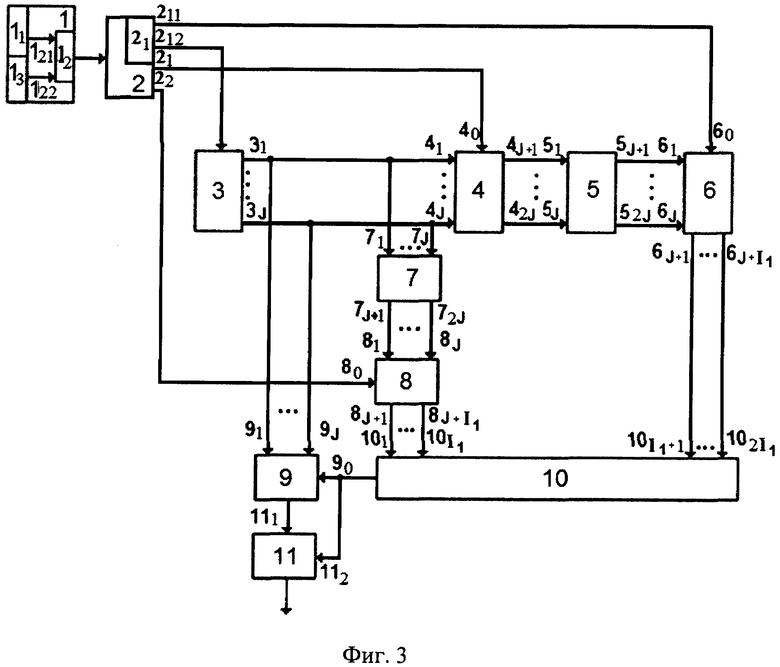
Латерационный способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети, заключающийся в излучении в моменты времени t и t+Δt сигналов, передаваемых источником радиосигнала и содержащих его опознавательный код, одновременно с излучением сигнала в момент времени t на подвижном источнике радиосигнала измеряют угол наклона касательной к элементу дорожной сети  на котором находится источник радиосигнала, сигнал, пропорциональный измеренному углу, кодируют, и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренного угла, источник радиосигнала в процессе перемещения измеряет длину пройденного пути, сигнал, пропорциональный длине Δе пройденного за время Δt пути, кодируют, и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение пройденного за время Δt пути, отличающийся тем, что из одного измерительного пункта, положение которого известно, измеряют задержки прихода электромагнитных волн
на котором находится источник радиосигнала, сигнал, пропорциональный измеренному углу, кодируют, и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение измеренного угла, источник радиосигнала в процессе перемещения измеряет длину пройденного пути, сигнал, пропорциональный длине Δе пройденного за время Δt пути, кодируют, и полученный код передают по радиоканалу передачи данных на измерительный пункт, на котором после приема и декодирования получают значение пройденного за время Δt пути, отличающийся тем, что из одного измерительного пункта, положение которого известно, измеряют задержки прихода электромагнитных волн  по сигналам, излучаемым источником радиосигнала в моменты времени t и t+Δt, известные на измерительном пункте, по измеренным задержкам определяют измеренные дальности до источника радиосигнала
по сигналам, излучаемым источником радиосигнала в моменты времени t и t+Δt, известные на измерительном пункте, по измеренным задержкам определяют измеренные дальности до источника радиосигнала  определяют те элементы дорожной сети, которые пересекают линию положения, соответствующую
определяют те элементы дорожной сети, которые пересекают линию положения, соответствующую  , или касаются ее, по параметрическим моделям дальностей, заданным для этих элементов
, или касаются ее, по параметрическим моделям дальностей, заданным для этих элементов  в функции натурального параметра, определяют значения натурального параметра
в функции натурального параметра, определяют значения натурального параметра  , соответствующие точкам пересечения линии положения для дальности
, соответствующие точкам пересечения линии положения для дальности  и элементов дорожной сети, для каждого из этих элементов рассчитывают значения дальностей
и элементов дорожной сети, для каждого из этих элементов рассчитывают значения дальностей  соответствующие перемещению подвижного источника радиосигнала на расстояние Δе, и из условия минимального рассогласования между ними и измеренной дальностью
соответствующие перемещению подвижного источника радиосигнала на расстояние Δе, и из условия минимального рассогласования между ними и измеренной дальностью  определяют номера элементов дорожной сети, на которых может находиться подвижный источник радиосигнала, по параметрическим моделям угла наклона касательных к элементам дорожной сети
определяют номера элементов дорожной сети, на которых может находиться подвижный источник радиосигнала, по параметрическим моделям угла наклона касательных к элементам дорожной сети  заданным в функции натурального параметра, и значениям натурального параметра
заданным в функции натурального параметра, и значениям натурального параметра  соответствующим точкам пересечения линии положения для измеренной дальности
соответствующим точкам пересечения линии положения для измеренной дальности  и элементов дорожной сети, для каждого элемента дорожной сети определяют расчетные значения углов наклона
и элементов дорожной сети, для каждого элемента дорожной сети определяют расчетные значения углов наклона  и из условия минимального рассогласования между ними и измеренным углом
и из условия минимального рассогласования между ними и измеренным углом  определяют номера элементов дорожной сети, на которых может находиться источник радиосигнала, из сравнения этих номеров с номерами, полученными из условия минимального рассогласования между расчетными значениями дальностей и повторно измеренной дальностью, определяют номер элемента дорожной сети, на котором находится подвижный источник радиосигнала, координаты местоположения подвижного источника радиосигнала определяют как координаты точки пересечения линии положения, соответствующей измеренной дальности
определяют номера элементов дорожной сети, на которых может находиться источник радиосигнала, из сравнения этих номеров с номерами, полученными из условия минимального рассогласования между расчетными значениями дальностей и повторно измеренной дальностью, определяют номер элемента дорожной сети, на котором находится подвижный источник радиосигнала, координаты местоположения подвижного источника радиосигнала определяют как координаты точки пересечения линии положения, соответствующей измеренной дальности  или
или  , и элемента дорожной сети, на котором находится подвижный источник радиосигнала.
, и элемента дорожной сети, на котором находится подвижный источник радиосигнала.
| Способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети | 2017 |
|
RU2666553C1 |
| СПОСОБ ОДНОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОСИГНАЛА НА ДОРОЖНОЙ СЕТИ | 2015 |
|
RU2572809C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТА ЗАСЕЧКОЙ ДАЛЬНОСТИ И УГЛА МЕСТА С ПЕРВОГО ИЗМЕРИТЕЛЬНОГО ПУНКТА И УГЛА МЕСТА - СО ВТОРОГО | 2017 |
|
RU2677586C1 |
| Способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов | 2015 |
|
RU2608176C1 |
| US 20090174600 A1, 09.07.2009 | |||
| WO 2013085587 A1, 13.06.2013 | |||
| DE 102012214190 A1, 13.02.2014 | |||
| JP 6113694 B2, 12.04.2017. | |||

