Объектом изобретения является способ радиолокации объектов - источников радиосигнала, находящихся на дорожной сети. Предлагаемый способ относится к области радиолокации и радионавигации, поскольку класс задач такого типа лежит в основе определения оценок местоположения объектов.
Известен способ радиолокации объектов - источников радиосигнала на плоскости [1]. Его недостатком является низкая точность, обусловленная возможностью появления ложных оценок координат местоположения, предполагающих нахождение объекта вне дорожной сети.
Известен также способ радиолокации объектов - источников радиосигнала на плоскости [2], заключающийся в измерении углов прихода электромагнитной волны от объекта - источника радиосигнала в двух разнесенных в пространстве измерительных пунктах, положение которых известно, определении координат местоположения объекта как точки пересечения линий положения, соответствующих полученным углам. Его недостатком так же является низкая точность, обусловленная возможностью появления ложных оценок координат местоположения, предполагающих нахождение объекта вне дорожной сети.
Цель изобретения: повышение точности определения координат местоположения объекта - источника радиосигнала, находящегося на дорожной сети, за счет рационального использования априорных данных о ее структуре и исключения возможности появления ложных оценок местоположения вне такой сети.
Обоснование сущности изобретения. Априорные данные о дорожной сети представляют следующим образом. Каждый ее элемент описывают параметрической зависимостью (Фиг.1)

где I - количество элементов дорожной сети; l≥0 - имеет смысл натурального параметра или длины пути [3-6].
К форме (1) можно приближенно перейти, если описание элементов дорожной сети задано в виде массивов

используемых, в частности, при формировании электронных карта. В этом случае

где

Из (2), (3) следует дискретный аналог (1)

на основании которого возможно приближенное представление (1).
Необходимо отметить, что в силу (3) для каждого элемента дорожной сети определяют опорную точку 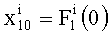 ,
,  ,
,  , от которой отсчитывают его длину.
, от которой отсчитывают его длину.
Для каждого измерительного пункта и каждого элемента дорожной сети рассчитывают зависимость значений пеленга от натурального параметра

где x11ип, x21ип и x12ип, x22ип - соответственно координаты первого и второго измерительных пунктов.
Соотношения (6) составляют преобразованные априорные данные о структуре дорожной сети в привязке к измерительным пунктам.
Пусть пеленги объекта α1изм, α2изм, полученные в измерительных пунктах, характеризуются дисперсиями измерения, соответственно  ,
,  . Тогда с учетом (6) отношения правдоподобия, соответствующие проведенным наблюдениям, могут быть представлены в виде [2]
. Тогда с учетом (6) отношения правдоподобия, соответствующие проведенным наблюдениям, могут быть представлены в виде [2]

Апостериорную вероятность события, связанного с принадлежностью объекта i-му элементу дорожной сети, оценивают в соответствии с (7) в виде результата косвенных измерений

где pi - априорная вероятность события, связанная с принадлежностью объекта i-му элементу дорожной сети.
Выбор номера элемента дорожной сети проводят по критерию максимума апостериорной вероятности в соответствии с решающим правилом

Длину участка i*-ого элемента дорожной сети от опорной точки, для которой полагают l=0, до точки, определяющей возможное положение объекта оценивают в соответствии с соотношением

в виде результата косвенных измерений. Отметим, что оценка (10) соответствует критерию максимального правдоподобия.
Иллюстративная оценка точности предлагаемого способа.
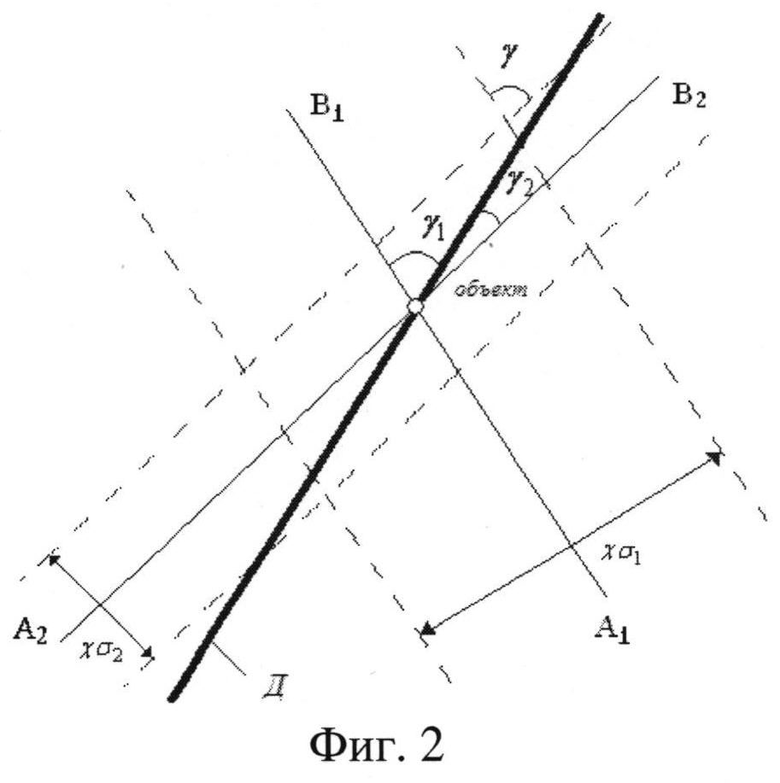
Рассмотрим прямолинейный участок элемента дорожной сети (Фиг.2). Пусть истинные линии положения A1B1 и A2B2 пересекаются под углом γ, а их положение по отношению к участку элемента дорожной сети определяется углами γ1 и γ2 (в условиях Фиг.2 γ2<0). Очевидно, что γ=γ1-γ2.
Среднеквадратические ошибки (СКО) линии положения для первого (σ1) и второго (σ2) измерительных пунктов связаны с СКО измерения первичных параметров соотношениями [2]

Будем полагать, что расстояние между измерительными пунктами и объектом достаточно велико. Тогда площадь области неопределенности местоположения объекта (приближенно полагаемой параллелограммом), соответствующая известному способу локации, может быть определена соотношением

где χ - выбирают, исходя из заданной вероятности нахождения объекта в области неопределенности, например, для правила трех сигм χ=6.
Рассмотрим точностные характеристики локации для предлагаемого способа. СКО местоположения объекта на участке элемента дорожной сети для первого и второго измерительных пунктов определяются соотношениями соответственно

Выражение для среднеквадратичной ошибки с учетом обоих измерений имеет вид

Положим, что участок дорожной сети имеет ширину, равную h. Тогда площадь области неопределенности местоположения объекта определяется соотношением

а относительный выигрыш в точности составляет

Или для случая, когда σ1=σ2=σ

где

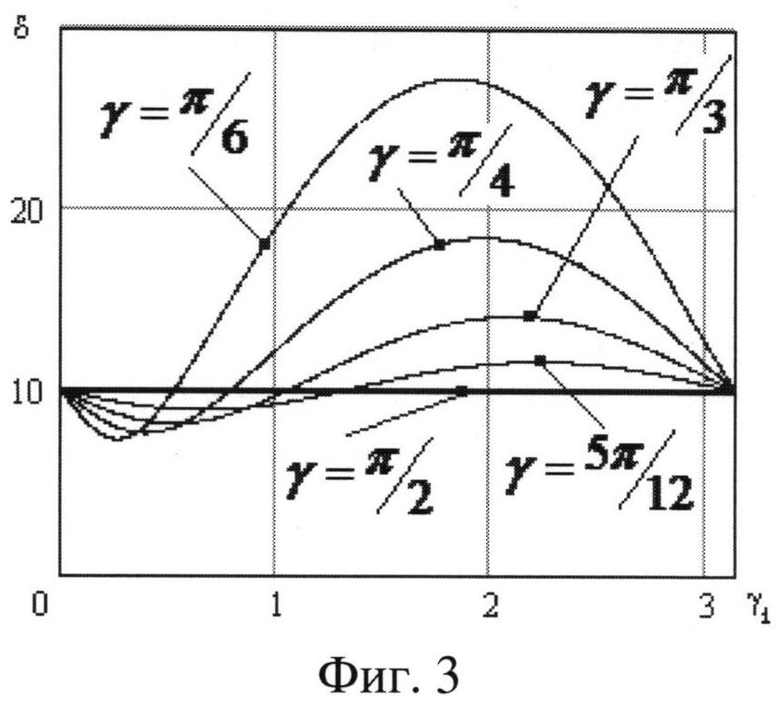
Графики зависимости δ(γ1) при  ,
,  ,
,  ,
,  ,
,  для ν=10 представлены на Фиг.3. Из них следует, что минимальный выигрыш в точности имеет место в случае, когда участок элемента дорожной сети совпадает с большей диагональю области неопределенности
для ν=10 представлены на Фиг.3. Из них следует, что минимальный выигрыш в точности имеет место в случае, когда участок элемента дорожной сети совпадает с большей диагональю области неопределенности  , а максимальный - при совпадении этого участка с меньшей диагональю этой области
, а максимальный - при совпадении этого участка с меньшей диагональю этой области  . При пересечении линий положения под прямым углом выигрыш в точности от γ1 не зависит и определяется только лишь величиной параметра v (18).
. При пересечении линий положения под прямым углом выигрыш в точности от γ1 не зависит и определяется только лишь величиной параметра v (18).
Предлагаемый способ может не приводить к выигрышу в точности лишь в случаях, когда значения параметра χ малы, а СКО линий положения меньше ширины элемента дорожной сети, что на практике встречается достаточно редко.
Пример.
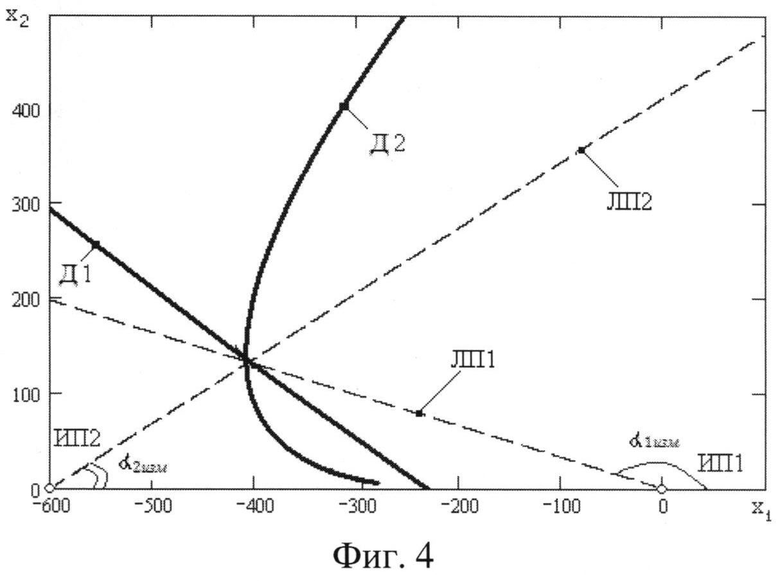
Пусть дорожная сеть содержит два пересекающихся элемента (I=2) (Фиг.4). Объект может равновероятно находиться на одном из них, т.е. p1=p2=0.5. Измерительные пункты (ИП) расположены в точках с координатами ИП1: x11ип=x21ип=0; ИП2: x12ип=0; x22ип=-600.
Здесь и далее числовые данные приведены в безразмерных единицах.
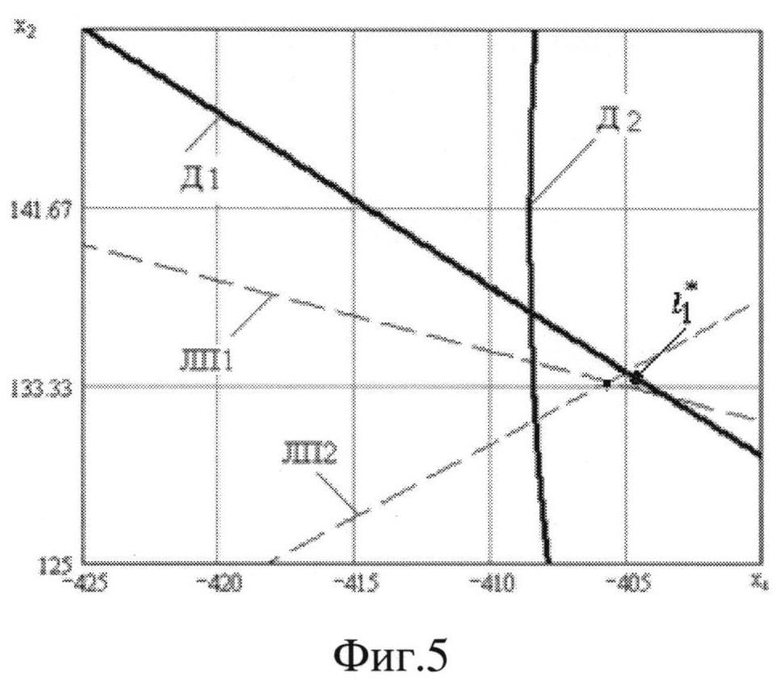
Рассмотрим фрагмент плоскости (Фиг.5) в окрестности пересечения линий положения угломеров. Будем полагать, что описание элементов дорожной сети задается в форме массивов данных, из которых могут быть выбраны подмассивы, соответствующие выделенному фрагменту.

В соответствии с (3), (4) представление (19) может быть приведено к виду (5)

Последовательность применения заявляемого способа.
1. Преобразование сигналов, пропорциональных измеренным углам прихода электромагнитной волны в соответствии с (6), (7), (8) с помощью двухпараметрических нелинейных функциональных преобразователей в сигналы, пропорциональные апостериорным вероятностям нахождения объекта источника радиосигнала на элементах дорожной сети.
Для условий примера результатом такого преобразования являются сигналы u1=pps1=0.708, u2=pps2=0.292.
2. Сравнение полученных по п.1 сигналов между собой и определение наибольшего из них.
3. Определение элемента дорожной сети, соответствующего наибольшему сигналу. В условиях примера i*=1.
4. Преобразование сигналов, пропорциональных измеренным углам прихода электромагнитной волны в соответствии с (7), (10) с помощью двухпараметрического нелинейного функционального преобразователя в сигнал, пропорциональный длине выбранного элемента дорожной сети от заданной опорной точки до точки нахождения источника радиоизлучения (косвенное измерение длины участка выбранного элемента дорожной сети).
В условиях примера проводится косвенное измерение длины участка первого элемента дорожной сети (i*=1) от его опорной точки до точки нахождения объекта.
В условиях примера для значений пеленгов α1изм=2.824, α2изм=0.602 (соответствующие этим пеленгам линии положения ЛП1, ЛП2, изображены на Фиг.4, 5) в предположении, что  , j=1,2, измерена длина
, j=1,2, измерена длина  участка первого элемента дорожной сети от его опорной точки до точки нахождения объекта, координаты которого, отмечены на Фиг.5.
участка первого элемента дорожной сети от его опорной точки до точки нахождения объекта, координаты которого, отмечены на Фиг.5.
Необходимо отметить, что определенные координаты жестко привязаны к первому элементу дорожной сети, тогда как известный способ, как следует из структуры области пересечения линий положения (Фиг.5), приводит к значениям координат, не принадлежащим заданной дорожной сети.
Структурная схема устройства, реализующего способ радиолокации объектов на дорожной сети, представлена на Фигуре 6.
На Фигуре 6 использованы следующие обозначения: блок 1 - первый измерительный пункт; блоки 21, …, 2I - двухпараметрические нелинейные функциональные преобразователи; блок 3 - решающее устройство; блок 4 - второй измерительный пункт; блок 5 - первый коммутатор; блоки 61, …, 6I - двухпараметрические нелинейные функциональные преобразователи для определения длины траектории; блок 7 - второй коммутатор; блок 8 - однопараметрический нелинейный функциональный преобразователь.
По результатам обработки электромагнитной волны на выходах блоков 1 и 4 формируются сигналы, пропорциональные углам прихода электромагнитной волны от объекта - источника радиоисигнала. Указанные сигналы поступают на входы 211, 212, …, 2I1, 2I2 соответственно функциональных преобразователей 21, …, 2I. В блоках 21, …, 2I сигналы, пропорциональные углам прихода электромагнитной волны, преобразуют в соответствии с (7), (8) в сигналы ui,  , пропорциональные апостериорным вероятностям нахождения объекта на I элементах дорожной сети. Сигналы ui,
, пропорциональные апостериорным вероятностям нахождения объекта на I элементах дорожной сети. Сигналы ui,  с выходов блоков 21, …, 2I поступают на входы 31, …, 3I решающего устройства 3. Решающее устройство 3 в соответствии с (9) сравнивает сигналы ui, , выделяет максимальный
с выходов блоков 21, …, 2I поступают на входы 31, …, 3I решающего устройства 3. Решающее устройство 3 в соответствии с (9) сравнивает сигналы ui, , выделяет максимальный  , определяет его номер i* и формирует сигнал, пропорциональный этому номеру. Указанный сигнал поступает на управляющие входы 50 и 70 коммутаторов 5 и 7 соответственно и управляющий вход 80 однопараметрического функционального преобразователя 8. По этому сигналу коммутатор 5 подключает выходы, блоков 1 и 4 ко входам одного из функциональных преобразователей 61, …, 6I соответствующего определенному номеру i* элемента дорожной сети, т.е. ко входам
, определяет его номер i* и формирует сигнал, пропорциональный этому номеру. Указанный сигнал поступает на управляющие входы 50 и 70 коммутаторов 5 и 7 соответственно и управляющий вход 80 однопараметрического функционального преобразователя 8. По этому сигналу коммутатор 5 подключает выходы, блоков 1 и 4 ко входам одного из функциональных преобразователей 61, …, 6I соответствующего определенному номеру i* элемента дорожной сети, т.е. ко входам  ,
,  блока
блока  . Одновременно коммутатор 7 подключает выход этого блока ко входу блока 8 функционального преобразователя. В блоке
. Одновременно коммутатор 7 подключает выход этого блока ко входу блока 8 функционального преобразователя. В блоке  в соответствии с (10) проводится преобразование сигналов пропорциональных углам прихода электромагнитной волны в сигнал, пропорциональный длине
в соответствии с (10) проводится преобразование сигналов пропорциональных углам прихода электромагнитной волны в сигнал, пропорциональный длине  i*-го элемента дорожной сети. Сигнал, пропорциональный
i*-го элемента дорожной сети. Сигнал, пропорциональный  , в блоке 8 преобразуется в соответствии с (1) в сигналы, пропорциональные значениям координат местоположения объекта
, в блоке 8 преобразуется в соответствии с (1) в сигналы, пропорциональные значениям координат местоположения объекта 
Сравнительный анализ заявляемого способа и известного способа локации местоположения объекта на плоскости.
1. В заявляемом способе определяют сигналы ui, , пропорциональные апостериорным вероятностям ppsi нахождения объекта на элементах дорожной сети, тогда как в известном способе факт привязки объекта к дорожной сети не используется.
2. Определение координат в заявляемом способе осуществляют на основе косвенного измерения длины участка наиболее вероятного элемента дорожной сети от его опорной точки до точки местоположения объекта, тогда как в известном способе координаты объекта определяют как координаты точки пересечения линий положения, соответствующих измеренным пеленгам.
3. Координаты местоположения объекта, определяемые при использовании заявляемого способа, жестко привязана к соответствующему элементу дорожной сети, тогда как в известном способе точка пересечения линий положения может не находиться и, как правило, не находится на дорожной сети.
4. В заявляемом способе рационально используется как информация о структуре дорожной сети, формируемая, например, с использованием электронных карт, так и закономерности ее описания с учетом взаимного расположения такой сети и измерительных пунктов.
Источники информации
1. Радиотехнические системы / под ред. Ю.М. Казаринова. М.: Академия. 2008.
2. Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. М.: Радио и связь. 1986.
3. Дубровин Б.А., Новиков С.П., Фоменко А.Т. Современная геометрия: Методы и приложения. М.: Наука, 1986. 760 с.
4. Хуторцев В.В. Принципы пространственно-дифференциальной фильтрации параметров траекторий объектов, движущихся вдоль одномерных многообразий // Радиотехника и электроника. 1993. Т.38. №6. С.1026-1036.
5. Хуторцев В.В. Пространственно-дифференциальная фильтрация марковских процессов на одномерных стохастических многообразиях // Автоматика и телемеханика. 1994. Т.8. №6. С.117-125.
6. Хуторцев В.В. Принципы пространственно-дифференциальной адаптивной фильтрации марковских процессов на одномерных многообразиях // Радиотехника и электроника. 1994. Т.39. №8. С.1637-1646.
Способ относится к радиолокации и радионавигации и предназначен для определения оценок местоположения объектов на дорожной сети. Достигаемый технический результат - повышение точности определения координат местоположения объекта - источника радиосигнала (ИРИ). Указанный результат достигается за счет того, что измеряют сигналы, пропорциональные углам прихода электромагнитной волны от ИРИ в двух разнесенных в пространстве измерительных пунктах, положение которых известно. Полученные сигналы, пропорциональные углам прихода электромагнитной волны, преобразуют в сигналы, пропорциональные апостериорным вероятностям нахождения объекта на элементах дорожной сети. Исходя из выбора максимального сигнала из полученного множества осуществляют определение наиболее вероятного элемента дорожной сети. Для этого элемента дорожной сети сигналы, пропорциональные углам прихода электромагнитной волны, преобразуют в сигнал, пропорциональный его длине от заданной опорной точки до точки нахождения ИРИ и однозначно определяющий значения координат местоположения объекта. 6 ил.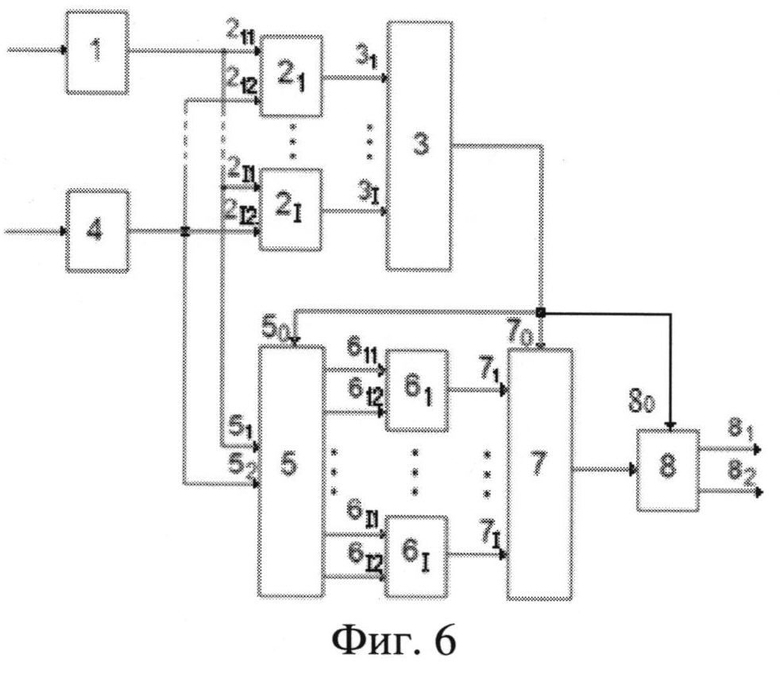
Способ радиолокации объектов на дорожной сети, заключающийся в измерении углов прихода электромагнитной волны от объекта - источника радиосигнала в двух разнесенных в пространстве измерительных пунктах, положение которых известно, отличающийся тем, что сигналы, пропорциональные углам прихода электромагнитной волны, преобразуют в сигналы, пропорциональные апостериорным вероятностям нахождения объекта на элементах дорожной сети, проводят их сравнение, из полученного множества сигналов выделяют максимальный сигнал и осуществляют определение соответствующего ему элемента дорожной сети, для этого элемента дорожной сети сигналы, пропорциональные углам прихода электромагнитной волны, преобразуют в сигнал, пропорциональный его длине от заданной опорной точки до точки нахождения источника радиоизлучения и однозначно определяющий значения координат местоположения объекта.
| КОНДРАТЬЕВ В.С | |||
| и др | |||
| Многопозиционные радиотехнические системы | |||
| Москва, Радио и связь, 1986 | |||
| МАСЛОБОЙКА | 1922 |
|
SU10917A1 |
| РАДИОПЕЛЕНГАЦИОННАЯ СИСТЕМА ДЛЯ ПОИСКА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2264937C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ | 2008 |
|
RU2374596C1 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2001 |
|
RU2174923C1 |
| US 5650770 A, 22.07.1997 | |||
| DE 4415052 C2, 04.09.1997 | |||
| US 2010253548 A1, 07.10.2010 | |||
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ГАЗОВЫХ БАЛЛОНОВ | 2002 |
|
RU2226645C2 |

