Изобретение относится к радиотехнике и может быть использовано в оборудовании передатчиков сигналов глобальных навигационных спутниковых систем типа ГЛОНАСС, GPS, Galileo и аналогичных.
Сигналы, формируемые и излучаемые в эфир передатчиками глобальных навигационных спутниковых систем (навигационные сигналы), представляют собой шумоподобные (псевдошумовые) радиосигналы, фазы несущих частот которых модулированы псевдослучайными бинарными периодическими последовательностями (кодовыми последовательностями), позволяющими на приемной стороне идентифицировать и разделять сигналы разных передатчиков, см., например, книгу: [1] - Шебшаевич B.C., Дмитриев П.П., Иванцевич Н.В. и др. / Сетевые спутниковые радионавигационные системы // 2-е изд., под ред. проф. B.C. Шебшаевича. - М.: Радио и связь, 1993, с. 28…31, 61…72. На основании принятых сигналов на приемной стороне осуществляются навигационные измерения. В основу этих измерений положены измерения псевдодальностей до соответствующих передатчиков, которые, в свою очередь, заключаются в определении запаздывания, возникающего в процессе распространения навигационных сигналов от передатчиков до приемника. При этом используются методы корреляционной обработки, основанные на сравнении кодовых последовательностей, относящихся к принятым навигационным сигналам, с их локальными, сдвигаемыми по времени копиями, формируемыми в приемнике.
На точность осуществляемых таким образом навигационных измерений влияют, в числе прочих факторов, недетерминированные аппаратные задержки, возникающие в передатчике в тракте формирования и усиления выходного сигнала, а также недетерминированные задержки, возникающие в тракте прохождения навигационного сигнала от передатчика до приемника через верхние слои атмосферы Земли (ионосферные задержки). Это ставит вопрос о необходимости определения этих задержек в целях их последующего учета и компенсации при осуществлении навигационных измерений.
Одним из методов уменьшения ошибок навигационных измерений, обусловленных ионосферными задержками, является так называемый двухчастотный метод ионосферной коррекции, описанный, в частности, в [1, с. 86…88]. Этот метод основывается на использовании известного свойства дисперсии ионосферы, а именно обратной квадратичной зависимости фазовой задержки сигнала от частоты. В рамках этого метода осуществляют совместную обработку результатов измерений псевдодальностей по двум сигналам, излучаемым навигационным спутником на двух разных частотах. При этом компенсируются погрешности, обусловленные ионосферным фактором, однако остаются нескомпенсированными погрешности, обусловленные недетерминированными аппаратными задержками, возникающими в передатчике в трактах формирования и усиления излучаемых им навигационных сигналов [1, с. 86].
Недетерминированные аппаратные задержки, возникающие в передатчиках навигационных сигналов, также негативно сказываются на точности взаимной синхронизации бортовых шкал времени навигационных спутников, приводя к последующим ошибкам координатно-временных измерений у потребителя, что отмечено, в частности, в книге: [2] - Карутин С.Н и др. / Дифференциальная коррекция и мониторинг глобальных навигационных спутниковых систем // М.: Издательство МГУ, 2014, с. 155…159, 384.
Таким образом, фактор недетерминированных аппаратных задержек, возникающих в передатчиках навигационных сигналов, является существенным при решении задач повышения точности координатно-временных измерений, что делает актуальной задачу определения этих задержек в течение всего времени работы передатчика.
Известно устройство передатчика, представленное в патентной заявке США: [3] - US 20110274210 A1, H04L 25/03, 10.11.2011, в котором осуществляется определение аппаратной задержки выходного модулированного сигнала (на выходе оконечного усилителя) относительно цифрового модулирующего сигнала, формируемого из аналогового опорного синхронизирующего сигнала. Для этого сигнал, снимаемый с выхода оконечного усилителя, преобразуется по частоте вниз и оцифровывается с помощью аналого-цифрового преобразователя. Полученные отсчеты подаются на вход устройства цифровой обработки, с помощью которого определяется искомая задержка выходного модулированного сигнала относительно цифрового модулирующего сигнала. Оценка задержки производится в два этапа. На первом этапе осуществляется грубое определение задержки (в периодах частоты дискретизации) путем нахождения максимума автокорреляционной функции. На втором этапе происходит уточнение величины задержки путем вычисления модуля ошибки по предложенному в [3] алгоритму. При этом оцифрованный сигнал проходит набор переключаемых КИХ-фильтров (линейных цифровых фильтров с конечной импульсной характеристикой), обеспечивающих задержку сигнала менее периода тактовой частоты, а определение искомой задержки заключается в нахождении индекса фильтра (задержка в котором заранее известна), обеспечивающего минимальный модуль ошибки.
Таким образом, в устройстве [3] осуществляется дискретное (в соответствии с количеством КИХ-фильтров) определение задержки выходного модулированного сигнала относительно цифрового модулирующего сигнала. Однако в нем не предусмотрены технические средства, которые позволяли бы определять задержку выходного сигнала относительно опорного синхронизирующего сигнала, что важно для ряда применений. Кроме того, техническая реализация устройства усложнена из-за применения набора КИХ-фильтров.
Наиболее близким по решаемой задаче к заявляемому устройству является устройство определения аппаратной задержки выходного сигнала передатчика модулированных сигналов, представленное в патенте США: [4] - US 8625714 В2, H04K 1/02, H04L 25/03, H04L 25/49, 07.01.2014, которое принято в качестве прототипа.
Устройство-прототип содержит последовательно соединенные формирователь отсчетов исходной модулирующей последовательности, опорный вход которого является входом опорного синусоидального сигнала, цифроаналоговый преобразователь, модулятор, оконечный усилитель мощности и направленный ответвитель. Первый выход направленного ответвителя связан с антенно-фидерным блоком, посредством которого выходной сигнал, сформированный оконечным усилителем мощности, излучается в эфир. Второй выход направленного ответвителя связан через последовательно соединенные преобразователь частоты, аналого-цифровой преобразователь и формирователь знака производной огибающей контролируемого сигнала с сигнальным входом блока цифровой обработки, опорный вход которого через формирователь знака производной огибающей модулирующего сигнала связан с выходом формирователя отсчетов модулирующей последовательности.
Блок цифровой обработки содержит многоотводную линию задержки, блок логических элементов, состоящий из элементов «исключающее ИЛИ», блок цифровых счетчиков и решающий блок. Первые входы элементов блока логических элементов соединены между собой и образуют сигнальный вход блока цифровой обработки, связанный с выходом формирователя знака производной огибающей контролируемого сигнала. Вторые входы элементов блока логических элементов связаны с соответствующими отводами многоотводной линии задержки, вход которой образует опорный вход блока цифровой обработки, связанный с выходом формирователя знака производной огибающей модулирующего сигнала. Выходы элементов блока логических элементов (выходы блока логических элементов) связаны с соответствующими входами блока цифровых счетчиков. Выходы блока цифровых счетчиков связаны с соответствующими входами решающего блока, выход которого образует информационный выход устройства-прототипа.
Работа устройства-прототипа происходит следующим образом.
На вход модулятора поступает модулирующий аналоговый сигнал с цифро-аналогового преобразователя, отсчеты для которого формируются формирователем отсчетов исходной модулирующей последовательности. С выхода модулятора модулированный по амплитуде сигнал с несущей частотой поступает на вход оконечного усилителя мощности, где усиливается, образуя выходной сигнал передатчика (выходной радиосигнал). Далее выходной сигнал передатчика с помощью направленного ответвителя разделяется на два направления.
Сигнал, ответвляемый по первому направлению, излучается в эфир с помощью антенно-фидерного блока.
Сигнал, ответвляемый по второму направлению, является контролируемым сигналом. Этот сигнал поступает на вход преобразователя частоты, осуществляющего преобразование несущей частоты контролируемого сигнала на промежуточную частоту с формированием квадратурных компонент. Эти квадратурные компоненты поступают на вход аналого-цифрового преобразователя, который осуществляет формирование отсчетов синфазной и квадратурной компонент.
Отсчеты синфазной и квадратурной компонент поступают на формирователь знака производной огибающей контролируемого сигнала, в котором формируется огибающая сигнала путем возведения квадратурных компонент в квадрат и сложения полученных значений, а затем над отсчетами огибающей проводится операция дифференцирования и определяется направление изменения (знак производной) огибающей на каждом тактовом интервале. В результате формируется последовательность отсчетов, несущая информацию о знаке производной огибающей контролируемого сигнала на каждом тактовом интервале. Эти отсчеты поступают на сигнальный вход блока цифровой обработки.
Аналогичным образом из выходного сигнала формирователя отсчетов исходной модулирующей последовательности с помощью формирователя знака производной огибающей модулирующего сигнала формируется последовательность отсчетов, несущая информацию о знаке производной огибающей модулирующего сигнала на каждом тактовом интервале. Эти отсчеты поступают на опорный вход блока цифровой обработки.
В блоке цифровой обработки отсчеты знаков производной огибающей модулирующего сигнала поступают на вход линии задержки, а отсчеты знаков производной огибающей контролируемого сигнала - на первые входы элементов «исключающее ИЛИ» блока логических элементов. На вторые входы этих элементов с соответствующих отводов линии задержки поступают задержанные отсчеты знаков производной огибающей модулирующего сигнала. В соответствии с функцией блока логических элементов на его выходах формируются цифровые сигналы, характеризующие результат перемножения последовательности знаков производной огибающей контролируемого сигнала и задержанных последовательностей знаков производной огибающей модулирующего сигнала. Результаты перемножения этих последовательностей поступают на выходы блока логических элементов, а с них - на входы блока цифровых счетчиков, образованных входами соответствующих счетчиков. При этом ненулевой результат перемножения указанных последовательностей на выходах блока логических элементов возникает при несовпадении знаков производных огибающих, а счетчики блока цифровых счетчиков подсчитывают число этих несовпадений. Выходные сигналы счетчиков поступают на соответствующие входы решающего блока. В решающем блоке определяется счетчик с минимальным числом несовпадений, по номеру которого судят о величине задержки выходного сигнала передатчика относительно исходной модулирующей последовательности.
Основным недостатком устройства-прототипа является то, что получаемые данные о задержке несут в себе дополнительные компоненты, обусловленные недетерминированными аппаратными задержками, возникающими в активных элементах преобразователя частоты, аналого-цифрового преобразователя, формирователя знака производной огибающей контролируемого сигнала и формирователя отсчетов модулирующей последовательности, которые не входят в тракт формирования и усиления выходного сигнала передатчика. Наличие этих дополнительных компонент снижает точность определения величины задержки выходного сигнала передатчика относительно исходной модулирующей последовательности. Снижает точность и само применение метода определения задержки по фазе огибающей (а не по фазе несущей, что потенциально точнее). Также применение данного метода ограничивает область использования устройства только сигналами с амплитудной модуляцией, в частности не позволяет использовать его для псевдошумовых фазомодулированных сигналов с постоянной огибающей, например, в передатчиках глобальных навигационных спутниковых систем типа ГЛОНАСС, GPS, Galileo и аналогичных.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является обеспечение возможности работы с псевдошумовыми фазомодулированными сигналами типа сигналов глобальных навигационных спутниковых систем при одновременном повышении точности определения аппаратной задержки выходного сигнала передатчика.
Сущность изобретения заключается в следующем.
Устройство определения аппаратной задержки выходного сигнала передатчика содержит последовательно соединенные формирователь отсчетов модулирующей последовательности, опорный вход которого является входом для опорного синусоидального сигнала, цифроаналоговый преобразователь, модулятор, усилитель мощности и направленный ответвитель, первый выход которого связан с антенно-фидерным блоком, предназначенным для излучения в эфир выходного сигнала, сформированного усилителем мощности, а также аналого-цифровой преобразователь и блок цифровой обработки. В отличие от прототипа второй выход направленного ответвителя, являющийся выходом контролируемого сигнала, связан с первым входом пассивного частотно-независимого сумматора, второй вход которого через фильтр нижних частот связан с опорным входом формирователя отсчетов модулирующей последовательности, а выход через аналого-цифровой преобразователь связан с входом блока цифровой обработки. При этом блок цифровой обработки содержит фильтр контролируемого сигнала и фильтр опорного сигнала, объединенные входы которых образуют вход блока цифровой обработки, выход фильтра опорного сигнала через блок определения фазы опорного сигнала связан с первым входом блока сравнения фаз, а выход фильтра контролируемого сигнала через корреляционный блок связан с вторым входом блока сравнения фаз, выход которого образует информационный выход блока цифровой обработки, являющийся информационным выходом устройства.
В вариантах, имеющих практическое применение, блок определения фазы опорного сигнала блока цифровой обработки содержит последовательно соединенные фильтр Гильберта и вычислитель арктангенса.
Сущность изобретения и возможность его осуществления поясняются иллюстративными материалами, представленными на фиг. 1-4, где:
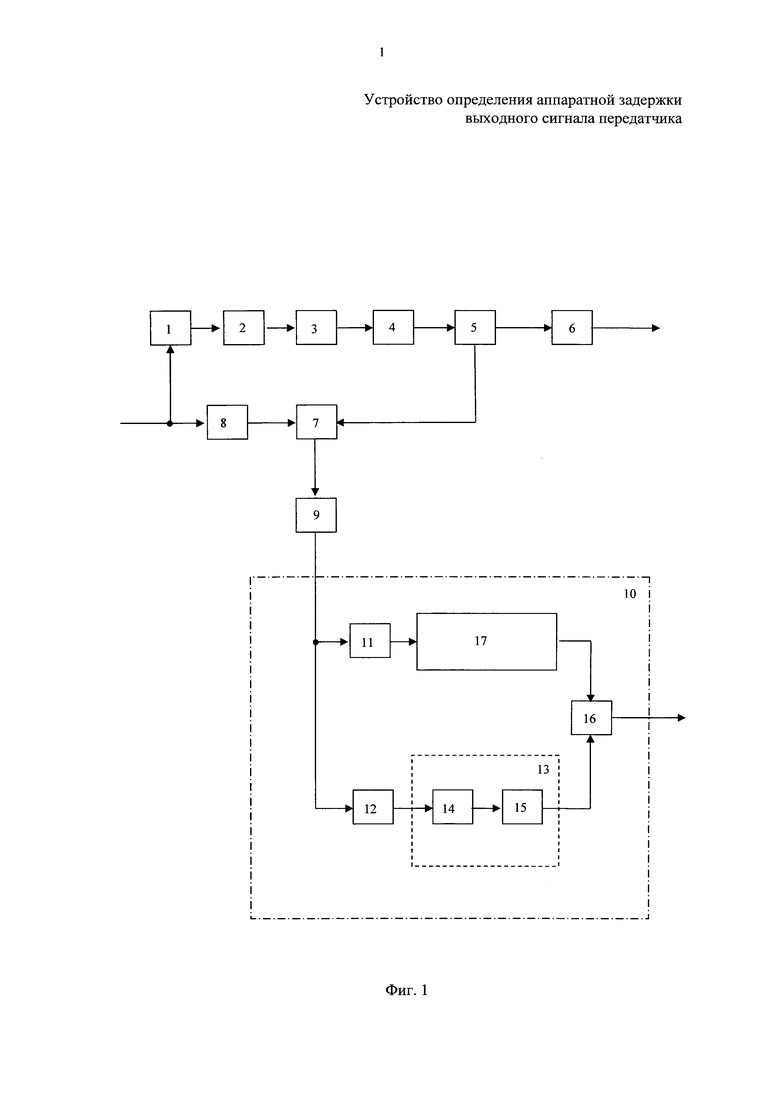
на фиг. 1 представлена структурная схема устройства определения аппаратной задержки выходного сигнала передатчика;
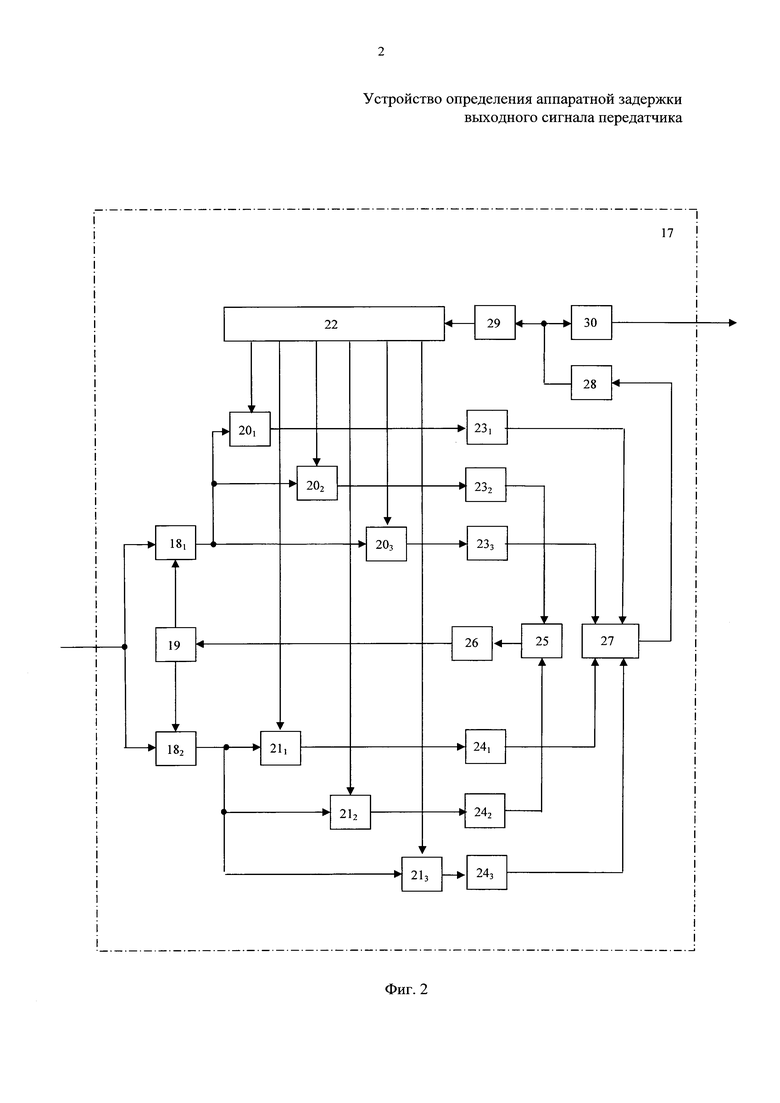
на фиг. 2 - пример выполнения корреляционного блока;
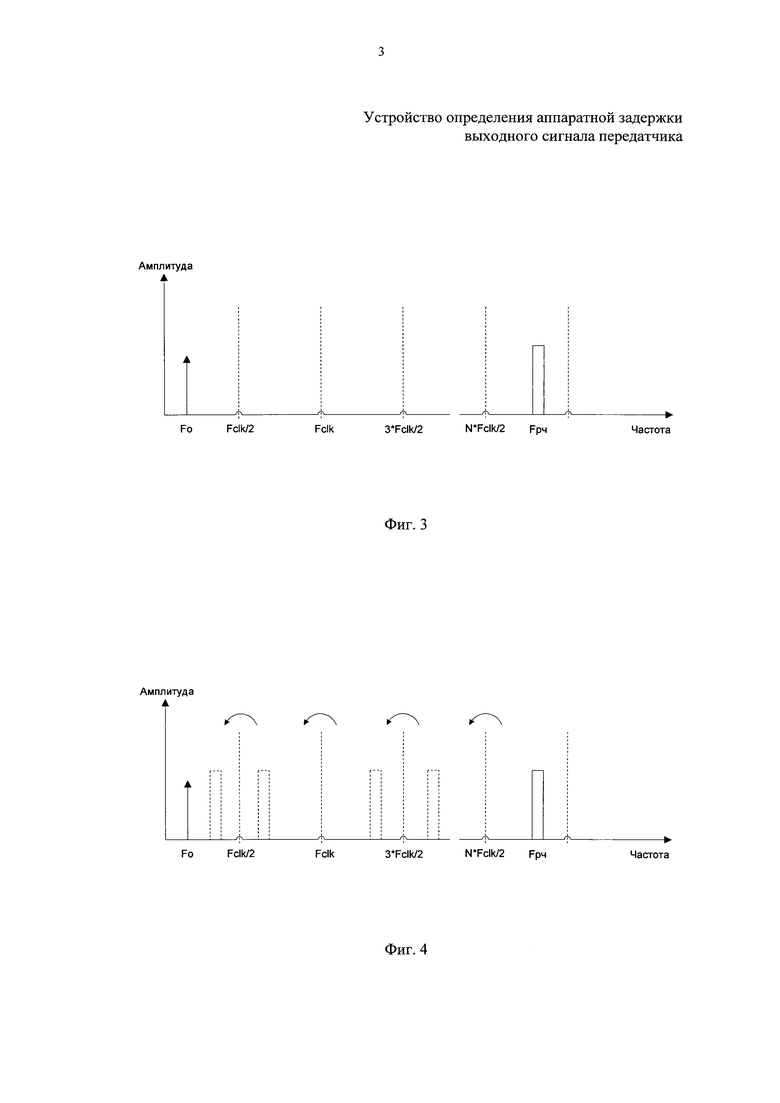
на фиг. 3 - схематическое представление спектра сигнала на входе аналого-цифрового преобразователя;
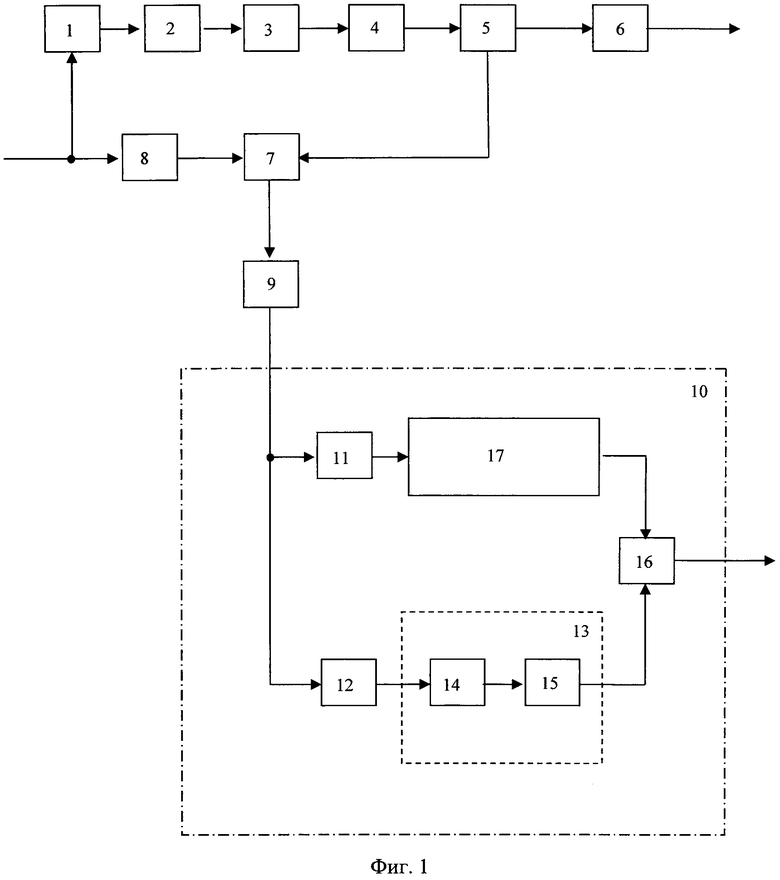
на фиг. 4 - схематическое представление спектра сигнала на выходе аналого-цифрового преобразователя.
Предлагаемое устройство определения аппаратной задержки выходного сигнала передатчика в рассматриваемом примере, см. фиг. 1, содержит последовательно соединенные формирователь 1 отсчетов модулирующей последовательности, опорный вход которого является входом для опорного синусоидального сигнала, цифроаналоговый преобразователь 2, модулятор 3, усилитель мощности 4 и направленный ответвитель 5, первый выход которого связан с антенно-фидерным блоком 6, предназначенным для излучения в эфир выходного сигнала, сформированного усилителем мощности 4.
Второй выход направленного ответвителя 5, являющийся выходом контролируемого сигнала, связан с первым входом пассивного частотно-независимого сумматора 7, второй вход которого через фильтр 8 нижних частот, выполняющий функцию развязывающего элемента, связан с опорным входом формирователя 1 отсчетов модулирующей последовательности, а выход через широкополосный аналого-цифровой преобразователь 9 связан с входом блока 10 цифровой обработки, выход которого образует информационный выход заявляемого устройства.
Блок 10 цифровой обработки содержит фильтр 11 контролируемого сигнала и фильтр 12 опорного сигнала, объединенные входы которых образуют вход блока 10 цифровой обработки.
Выход фильтра 12 опорного сигнала связан с входом блока 13 определения фазы опорного сигнала. В рассматриваемом примере блок 13 определения фазы опорного сигнала содержит последовательно соединенные фильтр 14 Гильберта и вычислитель 15 арктангенса, где вход фильтра 14 Гильберта и выход вычислителя 15 арктангенса образуют соответственно вход и выход блока 13 определения фазы опорного сигнала.
Выход блока 13 определения фазы опорного сигнала связан с первым входом блока 16 сравнения фаз. Второй вход блока 16 сравнения фаз через корреляционный блок 17 связан с выходом фильтра 11 контролируемого сигнала. Выход блока 16 сравнения фаз образует информационный выход блока 10 цифровой обработки, являющийся информационным выходом предлагаемого устройства.
Корреляционный блок 17 представляет собой одноканальный корреляционный приемник, определяющий фазу дальномерного кода и фазу несущей контролируемого сигнала. В рассматриваемом примере (фиг. 2) корреляционный блок 17 содержит два входных перемножителя 18 (181 и 182), объединенные сигнальные входы которых образуют вход корреляционного блока 17, связанный с выходом фильтра 11 контролируемого сигнала. Опорные входы перемножителей 181 и 182 связаны с соответствующими квадратурными (синусным и косинусным) выходами первого генератора 19, управляемого кодом, выполняющего функцию генератора несущей частоты. Выход перемножителя 181 связан с сигнальными входами первой группы перемножителей 20 (201, 202, 203), а выход перемножителя 182 связан с сигнальными входам второй группы перемножителей 21 (211, 212, 213). Опорные входы перемножителей 20 (201, 202, 203) и 21 (211, 212, 213) связаны с соответствующими выходами генератора 22 псевдослучайной последовательности (ПСП). Выходы перемножителей 20 (201, 202, 203) связаны с входами первой группы интеграторов со сбросом 23 (231, 232, 233), а выходы перемножителей 21 (211, 212, 213) связаны с входами второй группы интеграторов со сбросом 24 (241, 242, 243). Выходы интеграторов 232 и 242 связаны с входами дискриминатора 25, являющегося дискриминатором по фазе, выход которого через петлевой фильтр 26 связан с входом генератора 19, управляемого кодом. Выходы интеграторов 231, 233 и 241, 243 связаны с входами дискриминатора 27, являющегося дискриминатором по задержке. Выход дискриминатора 27 через петлевой фильтр 28 связан с входом второго генератора 29, управляемого кодом, и с входом третьего (вспомогательного) генератора 30, управляемого кодом. Генератор 29, управляемый кодом, выполняет функцию генератора тактовой частоты кода, его выход связан с входом генератора 22 ПСП. Вспомогательный генератор 30, управляемый кодом, выполняет функцию генератора опорной частоты, синхронизированной по задержке с ПСП, формируемой генератором 22. Его выход образует выход корреляционного блока 17, связанный с вторым входом блока 16 сравнения фаз.
Устройство определения аппаратной задержки выходного сигнала передатчика работает следующим образом.
На опорный вход формирователя 1 отсчетов модулирующей последовательности поступает опорный синусоидальный сигнал. Этот же сигнал поступает на вход фильтра 8 нижних частот.
Формирователь 1 отсчетов модулирующей последовательности формирует отсчеты модулирующей ПСП, которые поступают на вход цифроаналогового преобразователя 2.
Цифро-аналоговый преобразователь 2 формирует модулирующий аналоговый сигнал для модулятора 3, который формирует на своем выходе фазомодулированный радиосигнал с заданной несущей частотой, например сигнал спутника глобальной навигационной спутниковой системы ГЛОНАСС.
С выхода модулятора 3 фазомодулированный сигнал с несущей частотой поступает на вход усилителя мощности 4, где усиливается, образуя выходной сигнал передатчика (выходной радиосигнал). Далее выходной сигнал передатчика с помощью направленного ответвителя 5 разделяется на два направления.
Сигнал, ответвляемый по первому направлению, излучается в эфир с помощью антенно-фидерного блока 6, образуя навигационный сигнал, который принимается потребителем, определяющим свое местоположение по сигналам ГЛОНАСС.
Сигнал, ответвляемый по второму направлению, является контролируемым сигналом. Этот сигнал поступает на первый вход пассивного частотно-независимого сумматора 7, на второй вход которого через фильтр 8 нижних частот, выполняющий функцию развязывающего элемента, поступает опорный синусоидальный сигнал.
Выходной сигнал пассивного частотно-независимого сумматора 7, представляющий собой сумму контролируемого и опорного сигналов, поступает на вход широкополосного аналого-цифрового преобразователя 9. Схематично вид спектра сигнала на входе аналого-цифрового преобразователя 9 представлен на фиг. 3, где: F0 - частота опорного сигнала, Fрч - несущая частота контролируемого сигнала, Fclk - частота дискретизации.
В широкополосном аналого-цифрового преобразователе 9 входной сигнал оцифровывается (квантуется по амплитуде и дискретизируется по времени). При этом происходит преобразование несущей частоты контролируемого сигнала: отображение спектра сигнала в первую зону Найквиста. Схематично вид спектра преобразованного сигнала на выходе аналого-цифрового преобразователя 9 представлен на фиг. 4, где: F0 - частота опорного сигнала, Fрч - несущая частота контролируемого сигнала, Fclk - частота дискретизации.
С выхода аналого-цифрового преобразователя 9 преобразованный сигнал, представляющий собой последовательность отсчетов, поступает на вход блока 10 цифровой обработки.
В блоке 10 цифровой обработки осуществляется измерение задержки фазы несущей частоты контролируемого сигнала относительно фазы опорного сигнала. Для этого из суммарного входного сигнала с помощью фильтров 11 и 12 выделяются отсчеты контролируемого сигнала и отсчеты сигнала опорной частоты, которые поступают соответственно на вход корреляционного блока 17, в котором производится измерение фазы несущей частоты контролируемого сигнала, и на вход блока 13 определения фазы опорного сигнала.
В корреляционном блоке 17 отсчеты контролируемого сигнала перемножаются в перемножителях 181 и 182 с квадратурными отсчетами опорного колебания, формируемыми генератором 19, управляемым кодом, выполняющим функцию генератора несущей частоты. Далее результаты этих перемножений поступают на группы перемножителей 20 (201, 202, 203) и 21 (211, 212, 213), где перемножаются с отсчетами опорной ПСП, формируемыми генератором 22 ПСП, и затем поступают на группы интеграторов со сбросом 23 (231, 232, 233) и 24 (241, 242, 243). Результаты интегрирования поступают на дискриминатор 25 (дискриминатор по фазе) и дискриминатор 27 (дискриминатор по задержке).
Дискриминатор 25 формирует сигнал рассогласования для управления генератором 19, управляемым кодом, выполняющим функцию генератора несущей частоты. Для уменьшения шума сигнал рассогласования фильтруется петлевыми фильтром 26.
Дискриминатор 27 формирует сигнал рассогласования для управления генератором 29, управляемым кодом, выполняющим функцию генератора тактовой частоты кода, выходной сигнал которого управляет генератором 22 ПСП.
Выходной сигнал дискриминатора 27 используется также в качестве сигнала рассогласования для управления вспомогательным генератором 30, управляемым кодом, выполняющим функцию генератора опорной частоты, синхронизированной по задержке с ПСП, формируемой генератором 22.
Для уменьшения шума сигнал рассогласования, формируемый дискриминатором 27, фильтруется петлевыми фильтром 28.
Выходной сигнал вспомогательного генератора 30, являющийся выходным сигналом корреляционного блока 16, поступает на второй вход блока 16 сравнения фаз, на первый вход которого поступает сигнал с выхода блока 13 определения фазы опорного сигнала.
Определение фазы опорного сигнала в блоке 13 осуществляется с помощью входящих в его состав фильтра 14 Гильберта и вычислителя 15 арктангенса, при этом фильтр 14 Гильберта формирует аналитический сигнал, мгновенная фаза которого определяется в вычислителе 15 как арктангенс отношения мнимой и вещественной компонент этого сигнала.
В блоке 16 сравнения фаз осуществляется вычисление разности фаз аналитического сигнала и сигнала вспомогательного генератора 30. Эта разность фаз равна фактическому расхождению фазы опорного синусоидального сигнала и контролируемого сигнала.
Выходной сигнал блока 16 сравнения фаз, являющийся выходным информационным сигналом блока 10 цифровой обработки, поступает на выход устройства в качестве выходного информационного сигнала. Этот сигнал, например, может использоваться потребителем, определяющим свое местоположение по сигналам ГЛОНАСС, и служит для корректировки навигационных измерений.
При этом, поскольку блок 10 цифровой обработки является синхронным цифровым устройством, поэтому систематические погрешности (задержки обработки) являются строго детерминированными и могут быть вычислены и учтены при измерениях с любой заданной точностью.
Также за счет использования общего измерительного тракта (широкополосного аналого-цифрового преобразователя 9 и блока 10 цифровой обработки) недетерминированные задержки в его элементах являются общими для опорного и контролируемого сигналов и не оказывают влияния на результат измерения. Задержки в остальных элементах измерительного тракта (в фильтре 8 нижних частот, в пассивном частотно-независимом сумматоре 7), учитывая широкую полосу рабочих частот и отсутствие в их составе активных элементов, могут быть стабилизированы с высокой точностью.
Таким образом, за счет указанных факторов в заявляемом устройстве обеспечивается повышение точности измерения аппаратной задержки выходного сигнала передатчика, представляющего собой псевдошумовой фазомодулированный радиосигнал, например, типа сигнала спутника глобальных навигационных спутниковых систем с постоянной огибающей, при этом измерение задержки осуществляется одновременно со штатной работой передатчика по излучению этого сигнала в эфир.
Рассмотренное показывает, что предлагаемое изобретение осуществимо и обеспечивает достижение технического результата, заключающегося в обеспечении возможности работы с псевдошумовыми фазомодулированными сигналами типа сигналов глобальных навигационных спутниковых систем при одновременном повышении точности определения аппаратной задержки выходного сигнала передатчика.
Источники информации
1. Шебшаевич B.C., Дмитриев П.П., Иванцевич Н.В. и др. / Сетевые спутниковые радионавигационные системы // 2-е изд., под ред. проф. B.C. Шебшаевича. - М: Радио и связь, 1993.
2. Карутин С.Н и др. / Дифференциальная коррекция и мониторинг глобальных навигационных спутниковых систем // М.: Издательство МГУ, 2014.
3. US 20110274210 A1, H04L 25/03, опубл. 10.11.2011.
4. US 8625714 В2, H04K 1/02, H04L 25/03, H04L 25/49, опубл. 07.01.2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2442186C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2004 |
|
RU2258865C1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1999 |
|
RU2158016C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УТЕЧЕК В МАГИСТРАЛЬНЫХ ТРУБОПРОВОДАХ | 2006 |
|
RU2302584C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| СИСТЕМА ОПЕРАТИВНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ | 1998 |
|
RU2125277C1 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
Изобретение относится к радиотехнике и может быть использовано в передатчиках сигналов глобальных навигационных спутниковых систем. Достигаемый технический результат - обеспечение возможности работы с псевдошумовыми фазомодулированными сигналами при одновременном повышении точности определения аппаратной задержки выходного сигнала передатчика. Устройство определения аппаратной задержки выходного сигнала передатчика содержит формирователь отсчетов модулирующей последовательности, цифроаналоговый преобразователь, модулятор, усилитель мощности, направленный ответвитель, антенно-фидерный блок, аналого-цифровой преобразователь, блок цифровой обработки, пассивный частотно-независимый сумматор, фильтр нижних частот, при этом блок цифровой обработки содержит фильтр контролируемого сигнала, фильтр опорного сигнала, блок определения фазы опорного сигнала, блок сравнения фаз, корреляционный блок .1 з.п. ф-лы, 4 ил.
1. Устройство определения аппаратной задержки выходного сигнала передатчика, содержащее последовательно соединенные формирователь отсчетов модулирующей последовательности, опорный вход которого является входом для опорного синусоидального сигнала, цифроаналоговый преобразователь, модулятор, усилитель мощности и направленный ответвитель, первый выход которого связан с антенно-фидерным блоком, предназначенным для излучения в эфир выходного сигнала, сформированного усилителем мощности, а также аналого-цифровой преобразователь и блок цифровой обработки, отличающееся тем, что второй выход направленного ответвителя, являющийся выходом контролируемого сигнала, связан с первым входом пассивного частотно-независимого сумматора, второй вход которого через фильтр нижних частот связан с опорным входом формирователя отсчетов модулирующей последовательности, а выход через аналого-цифровой преобразователь связан с входом блока цифровой обработки, при этом блок цифровой обработки содержит фильтр контролируемого сигнала и фильтр опорного сигнала, объединенные входы которых образуют вход блока цифровой обработки, выход фильтра опорного сигнала через блок определения фазы опорного сигнала связан с первым входом блока сравнения фаз, а выход фильтра контролируемого сигнала через корреляционный блок связан с вторым входом блока сравнения фаз, выход которого образует информационный выход блока цифровой обработки, являющийся информационным выходом устройства.
2. Устройство по п. 1, отличающееся тем, что блок определения фазы опорного сигнала блока цифровой обработки содержит последовательно соединенные фильтр Гильберта и вычислитель арктангенса.
| US 8625714 B2, 07.01.2014 | |||
| СПОСОБ ПОДАВЛЕНИЯ ШУМА В ИНФОРМАЦИОННОМ СИГНАЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2206960C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2399088C2 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

