Изобретение относится к робототехнике и может найти применение в качестве мобильного робота и самодвижущейся транспортной тележки.
Известен мобильный робот, содержащий платформу со смонтированными на ней колесами, датчиками параметров движения и бортовой компьютер (патент RU №2303240, 2006 г.).
Данный робот обладает ограниченной маневренностью.
Наиболее близким к предлагаемому изобретению является мобильный робот, содержащий автономную навигационную систему для перемещения в среде с навигационными маркерными элементами, платформу, три колеса, три колесных вала со смонтированными на них упомянутыми колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой (патент RU №2130618, 1994 г.).
Конструктивные особенности данного робота не позволяют ему разворачиваться на месте и осуществлять движение в произвольном направлении без предварительной ориентации робота, что ограничивает его маневренность в целом. В качестве навигационных маркерных элементов в нем используются катушки индуктивности, размещенные над опорной плоскостью, а в качестве датчиков ориентации робота относительно навигационных маркерных элементов - катушки индуктивности, установленные на платформе робота.
Такой робот не может определять направление на навигационные маркерные элементы в цехах промышленных предприятий в присутствии сильных электромагнитных полей от работающего оборудования.
Технический результат, на достижение которого направлено данное изобретение по первому варианту, является повышение маневренности и расширение функциональных возможностей мобильного робота за счет обеспечения возможности определять направление и осуществлять движение на навигационные маркерные элементы в цехах промышленных предприятий в присутствии сильных электромагнитных полей от работающего оборудования.
Технический результат, на достижение которого направлено данное изобретение по второму варианту, при котором в качестве навигационных маркерных элементов используют нанесенную на опорную плоскость светоконтрастную полосу, является повышение маневренности мобильного робота и расширение его функциональных возможностей за счет обеспечения возможности определять свое положение относительно навигационных маркерных элементов в цехах промышленных предприятий в присутствии сильных электромагнитных полей от работающего оборудования за счет выполнения навигационной системы с возможностью определения отклонения проекции точки середины передней кромки платформы робота на опорную плоскость от средней линии светоконтрастной полосы и определения отклонения продольной оси платформы робота от касательной к средней линии светоконтрастной полосы в указанной точке.
Указанный технический результат по первому варианту достигается тем, что в мобильный робот, содержащий автономную навигационную систему для перемещения в среде с навигационными маркерными элементами, платформу, три колеса, три колесных вала со смонтированными на них упомянутыми колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой, дополнительно введены датчик угла поворота второго колеса и датчик скорости вращения второго колеса, кинематически связанные с колесным валом второго колеса, кинематически связанным с выходным валом второго электродвигателя, в качестве колесной вилки третьего колеса используют вилку «рояльного» типа, при этом в качестве навигационных маркерных элементов используют установленные на опорной плоскости светоизлучающие маяки, автономная навигационная система выполнена с возможностью кругового сканирования пространства, а бортовая вычислительная сеть выполнена с возможностью сбора и обработки данных с датчиков угла поворота и датчиков скорости вращения первого и второго колеса и формирования и передачи управляющих сигналов на электродвигатели первого и второго колеса.
При этом автономная навигационная система, выполненная с возможностью кругового сканирования пространства, состоит из двух частей, первая из которых содержит оптический сканер кругового обзора пространства, а вторая часть содержит узел приема и обработки сигнала с выхода оптического сканера кругового обзора пространства, при этом первая и вторая части автономной навигационной системы соединены между собой беспроводным оптическим каналом связи через вращающееся сочленение.
При этом в мобильный робот введены установленная на платформе мачта, первая площадка, жестко закрепленная на мачте параллельно платформе, третий электродвигатель и третий датчик угла поворота, установленные на первой площадке, вторая площадка, установленная на мачте параллельно платформе с возможностью вращения в горизонтальной плоскости относительно вертикальной оси мачты и кинематически связанная с третьим электродвигателем и третьим датчиком угла поворота второй площадки, причем на второй площадке установлен оптический сканер кругового обзора пространства, например фотообъектив, оптическая ось которого лежит в горизонтальной плоскости и пересекается с осью мачты, а узел приема и обработки сигнала с выхода оптического сканера кругового обзора пространства содержит фотоприемный элемент, например фотодиод, и последовательно соединенные усилитель и компаратор, при этом выход фотоприемного элемента соединен со входом усилителя, а сам фотоприемный элемент смонтирован внутри мачты таким образом, что его фотоприемная плоскость расположена перпендикулярно оси мачты, а ось проходит через центр фотоприемной плоскости.
При этом беспроводный оптический канал связи через вращающееся сочленение выполнен в виде преломляющей призмы, смонтированной на второй площадке таким образом, что луч света, попавший на фотообъектив по его оптической оси, преломляется в преломляющей призме на 90° и направляется в центр фотоприемного элемента по оси мачты.
При этом бортовая вычислительная сеть содержит головной контроллер, контроллер управления первым электродвигателем, контроллер управления вторым электродвигателем и контроллер управления третьим электродвигателем, объединенные через общую шину, при этом выходы контроллеров и управления первым, вторым и третьим электродвигателями подключены к управляющим входам соответственно первого, второго и третьего электродвигателей, соответствующие входы контроллера управления первым электродвигателем соединены с датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, соответствующие входы контроллера управления вторым электродвигателем соединены с датчиком угла поворота второго колеса и датчиком скорости вращения второго колеса, а соответствующий вход контроллера управления третьим электродвигателем соединен с датчиком угла поворота второй площадки.
Указанный технический результат по второму варианту достигается тем, что в мобильный робот, содержащий автономную навигационную систему для перемещения в среде с навигационными маркерными элементами, платформу, три колеса, три колесных вала со смонтированными на них упомянутыми колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой, дополнительно введены датчик угла поворота второго колеса и датчик скорости вращения второго колеса, кинематически связанные с колесным валом второго колеса, кинематически связанным с выходным валом второго электродвигателя, в качестве колесной вилки третьего колеса используют вилку «рояльного» типа, при этом в качестве навигационных маркерных элементов используют нанесенную на опорную плоскость светоконтрастную полосу, а автономная навигационная система выполнена с возможностью определения отклонения проекции точки середины передней кромки платформы робота на опорную плоскость от средней линии светоконтрастной полосы и отклонения продольной оси платформы робота от касательной к средней линии светоконтрастной полосы в указанной точке.
При этом автономная навигационная система содержит стойки и четвертый контроллер, установленные на платформе, кронштейн, визуальный датчик обзора части опорной плоскости перед передней кромкой платформы робота, при этом визуальный датчик установлен на кронштейне, смонтированном на стойках.
При этом визуальный датчик содержит фотообъектив с установленной в его фокусной плоскости фотоприемником, например, фотоприемной матрицей, выходы которой подключены к соответствующим входам четвертого контроллера.
Сущность изобретения поясняется чертежами.
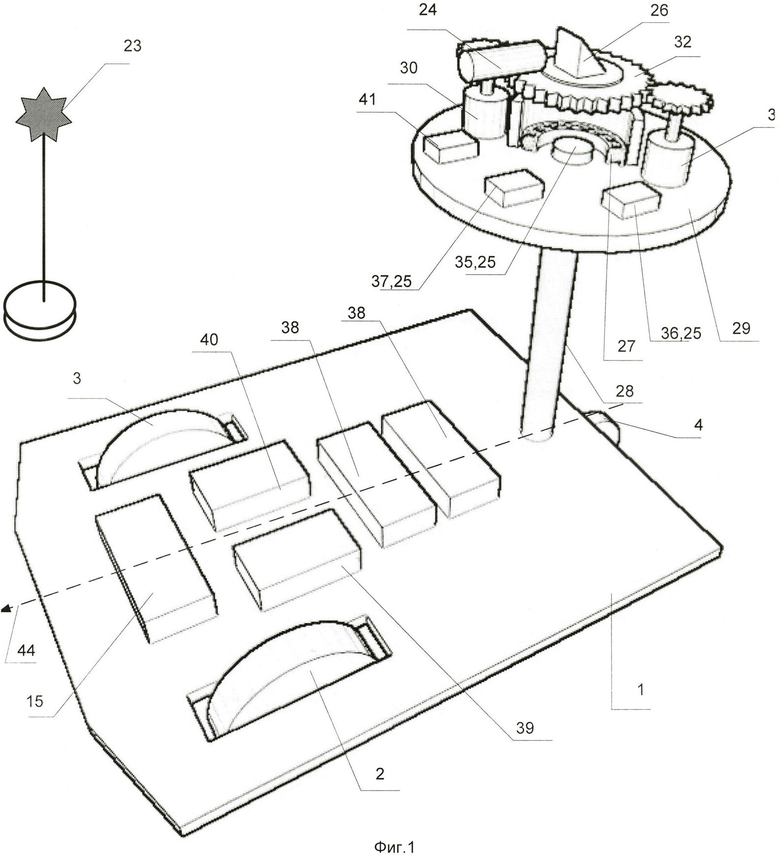
На фиг.1 изображен внешний вид робота по первому варианту.
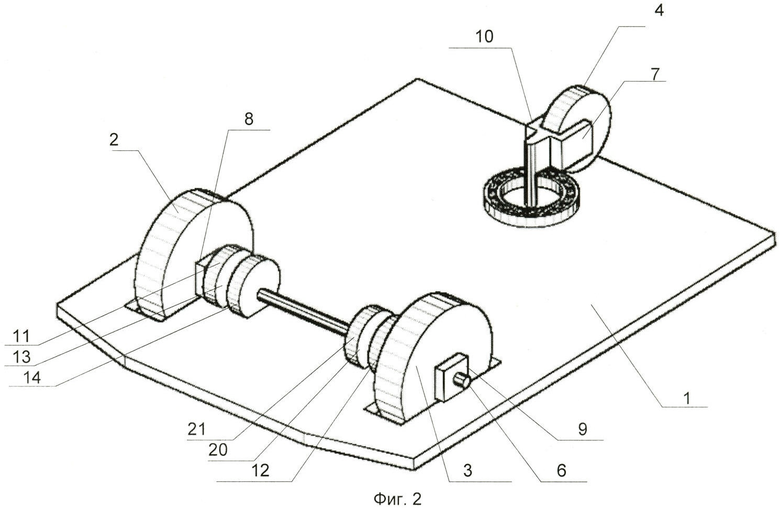
На фиг.2 изображен внешний вид платформы робота с установленными на ней элементами по первому и второму варианту (вид снизу).
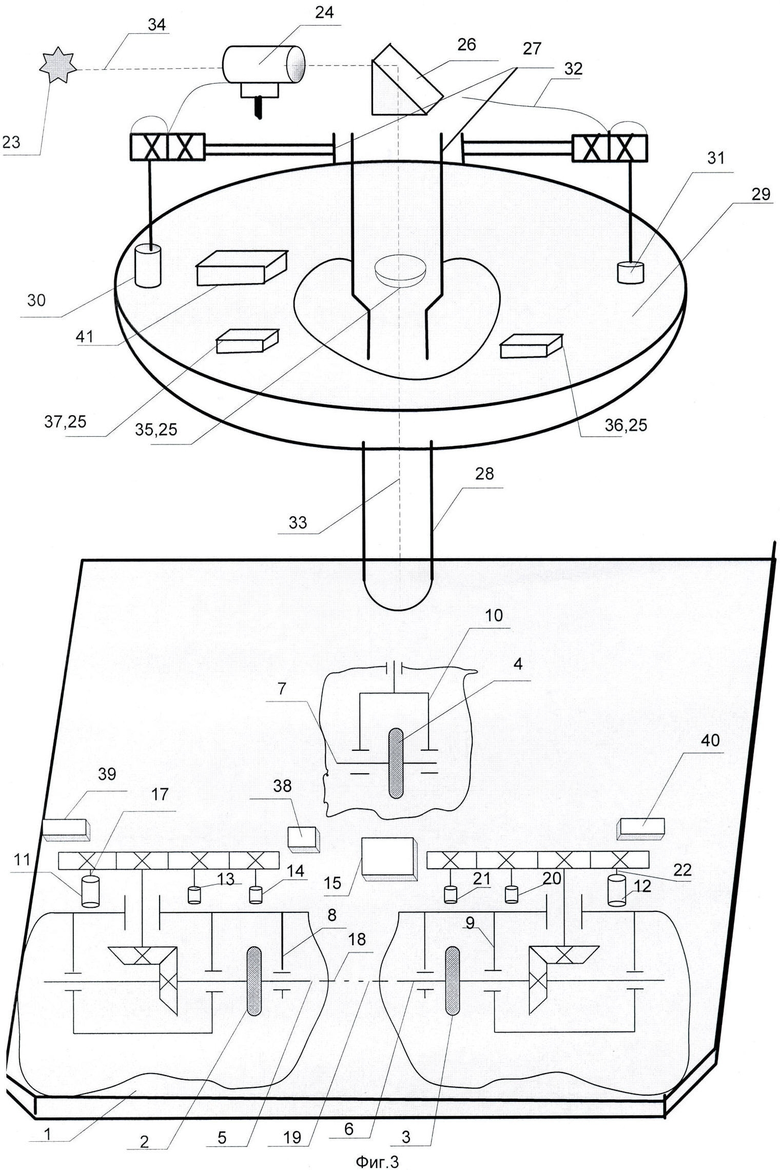
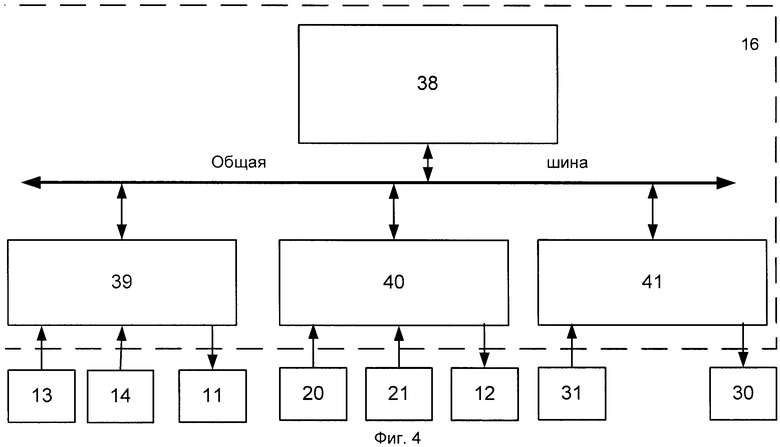
На фиг.3 приведена кинематическая схема робота по первому варианту, а на фиг.4 - функциональная схема бортовой вычислительной сети робота с подключенными к ней элементами по первому варианту.
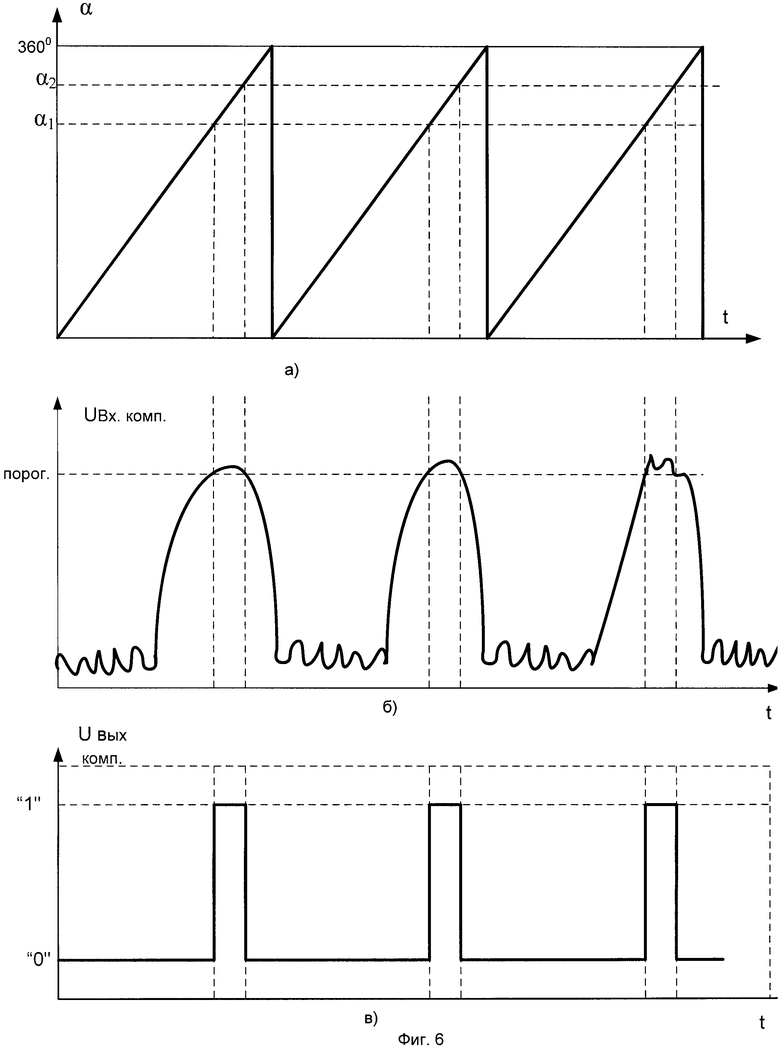
На фиг.5 показана функциональная схема автономной навигационной системы, а на фиг.6 - эпюры сигналов с выходов элементов узла приема и обработки сигнала от светоизлучающего маяка автономной навигационной системой по первому варианту.
На фиг.7 изображен внешний вид робота по второму варианту.
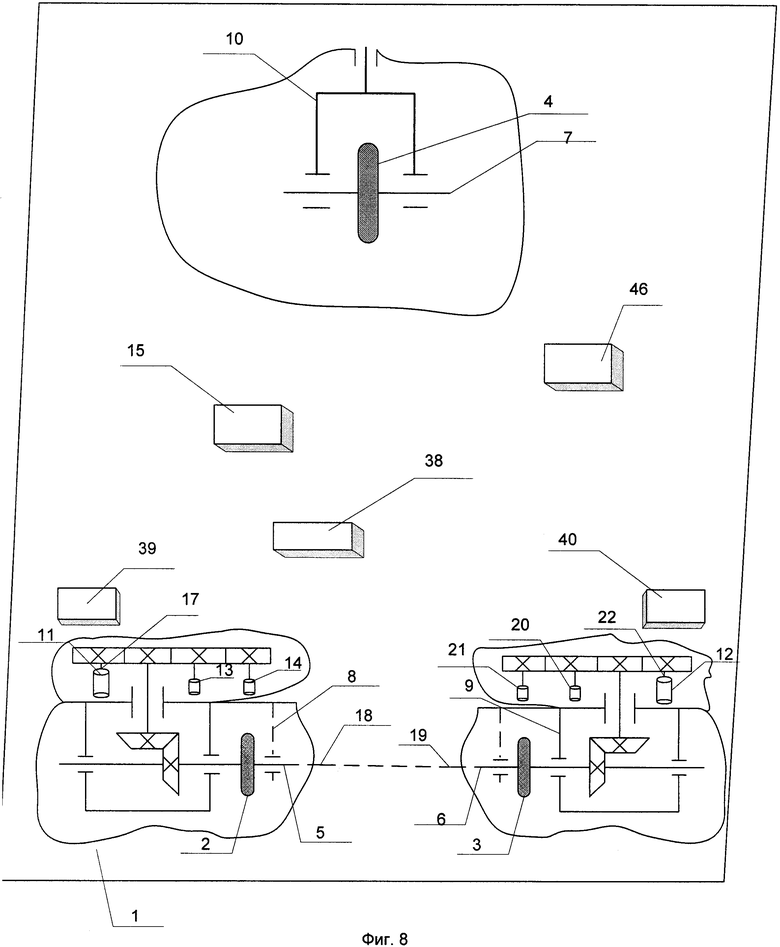
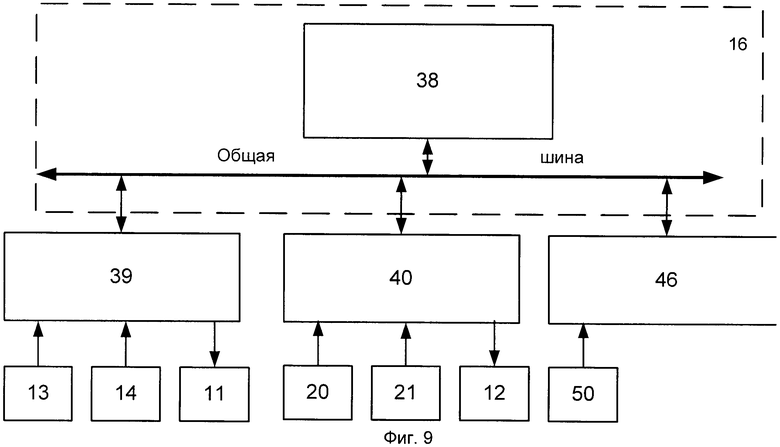
На фиг.8 приведена кинематическая схема робота по второму варианту, а на фиг.9 - функциональная схема бортовой вычислительной сети робота с подключенными к ней элементами по второму варианту.
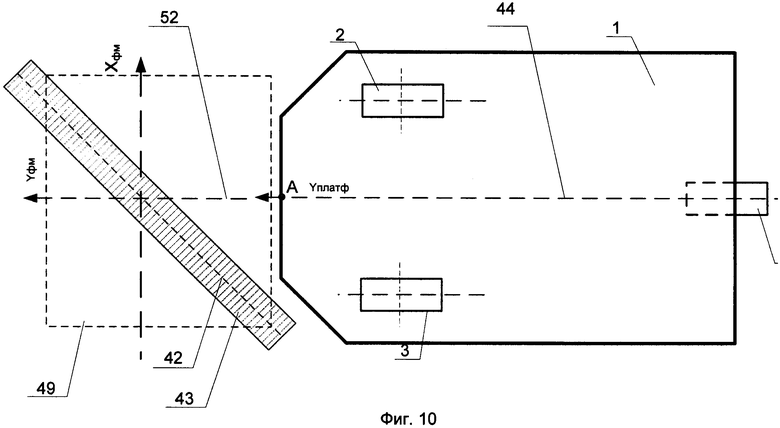
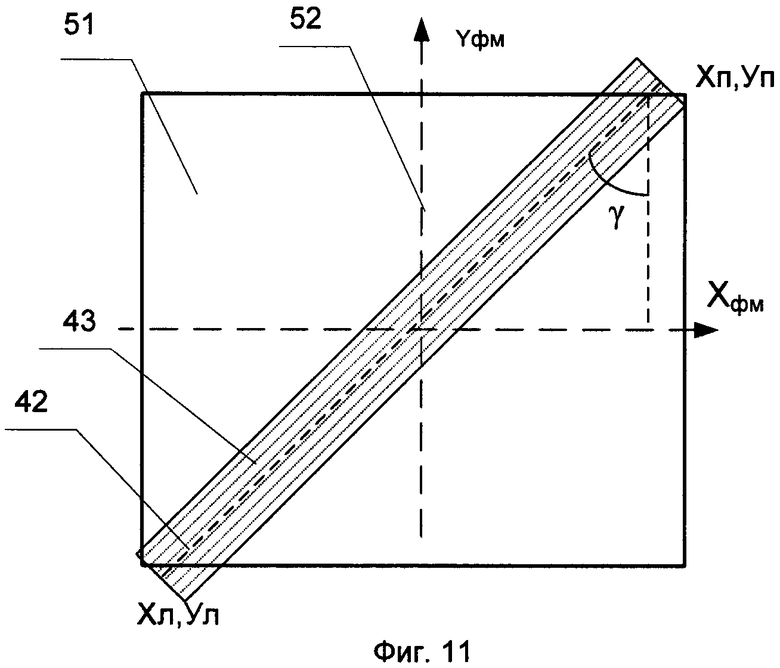
На фиг.10 схематично показан вид сверху на платформу робота с указанием части опорной плоскости перед передней кромкой платформы робота, находящейся в поле зрения визуального датчика, а на фиг.11 - схематическое изображение фотоприемной матрицы при обработке сигнала от визуального датчика.
На фиг.1-11 обозначены: 1 - платформа; 2, 3 и 4 - первое, второе и третье колесо соответственно; 5, 6 и 7 - колесные валы первого, второго и третьего колеса соответственно; 8, 9 и 10 - колесные вилки первого, второго и третьего колеса соответственно; 11 и 12 - электродвигатели первого и второго колеса соответственно; 13 - датчик угла поворота первого колеса; 14 - датчик скорости вращения первого колеса; 15 - источник питания; 16 - бортовую вычислительную сеть; 17 - выходной вал первого электродвигателя; 18 и 19 - оси колесных валов первого и второго колеса соответственно; 20 - датчик угла поворота второго колеса; 22 - датчик скорости вращения второго колеса; 23 - светоизлучающие маяки; 24 - оптический сканер кругового обзора пространства, например, первый фотообъектив; 25 - узел приема и обработки сигнала с выхода оптического сканера кругового обзора пространства; 26 - беспроводный оптический канал связи через вращающееся сочленение; 27 - вращающееся сочленение; 28 - мачта; 29 - первая площадка; 30 - третий электродвигатель; 31 - третий датчик угла поворота; 32 - вторая площадка; 33 - ось мачты; 34 - оптическая ось фотообъектива; 35 - фотоприемный элемент; 36 - усилитель; 37 - компаратор; 38 - головной контроллер; 39, 40 и 41 - контроллер управления первым, вторым и третьим электродвигателем соответственно; 43 - светоконтрастная полоса; 44 - продольная ось платформы; 45 - стойки; 46 - четвертый контроллер; 47 - кронштейн; 48 - визуальный датчик обзора части опорной плоскости перед передней кромкой платформы робота; 49 - часть опорной плоскости перед передней кромкой платформы робота, находящейся в поле зрения визуального датчика; 50 - второй фотообъектив; 51 - фотоприемная матрица.
Мобильный робот, содержащий автономную навигационную систему для перемещения в среде с навигационными маркерными элементами по первому варианту, включает платформу 1, три колеса 2, 3 и 4, три колесных вала 5, 6 и 7 со смонтированными на них колесами 2, 3 и 4, установленные на платформе 1 три колесные вилки 8, 9 и 10, два электродвигателя 11 и 12, датчик 13 угла поворота первого колеса 2, датчик 14 скорости вращения первого колеса 2, источник питания 15 и бортовую вычислительную сеть 16, при этом колесный вал 5 первого колеса кинематически связан с выходным валом 17 первого электродвигателя 11, датчиком 13 угла поворота первого колеса и датчиком 14 скорости вращения первого колеса 2, а оси 18 и 19 колесных валов 5 и 6 первого 2 и второго 3 колес лежат на одной прямой, отличающийся тем, что в него дополнительно введены датчик 20 угла поворота второго колеса и датчик 21 скорости вращения второго колеса 3, кинематически связанные с колесным валом 6 второго колеса 3, кинематически связанным с выходным валом 22 второго электродвигателя 12, в качестве колесной вилки 10 третьего колеса 4 используют вилку «рояльного» типа, при этом в качестве навигационных маркерных элементов используют установленные на опорной плоскости светоизлучающие маяки 23, автономная навигационная система выполнена с возможностью кругового сканирования пространства, а бортовая вычислительная сеть 16 выполнена с возможностью сбора и обработки данных с датчиков 13 и 20 угла поворота и датчиков 14 и 21 скорости вращения первого и второго колеса 2 и 3 и формированияи и передачи управляющих сигналов на электродвигатели 11 и 12 первого и второго колеса 2 и 3.
При этом автономная навигационная система, выполненная с возможностью кругового сканирования пространства, состоит из двух частей, первая из которых содержит оптический сканер 24 кругового обзора пространства, а вторая часть содержит узел 25 приема и обработки сигнала с выхода оптического сканера 24 кругового обзора пространства, при этом первая и вторая части автономной навигационной системы соединены между собой беспроводным оптическим каналом 26 связи через вращающееся сочленение 27.
При этом в мобильный робот введены установленная на платформе 1 мачта 28, первая площадка 29, жестко закрепленная на мачте 28 параллельно платформе 1, третий электродвигатель 30 и третий датчик 31 угла поворота, установленные на первой площадке 29, вторая площадка 32, установленная на мачте 28 параллельно платформе 1 с возможностью вращения в горизонтальной плоскости относительно вертикальной оси 33 мачты 28 и кинематически связанная с третьим электродвигателем 30 и третьим датчиком 31 угла поворота второй площадки 32, причем на второй площадке 32 установлен оптический сканер 24 кругового обзора пространства, например фотообъектив, оптическая ось 34 которого лежит в горизонтальной плоскости и пересекается с осью 33 мачты 28, а узел 25 приема и обработки сигнала с выхода оптического сканера 24 кругового обзора пространства содержит фотоприемный элемент 35, например фотодиод, и последовательно соединенные усилитель 36 и компаратор 37, при этом выход фотоприемного элемента 35 соединен со входом усилителя 36, а сам фотоприемный элемент 35 смонтирован внутри мачты 28 таким образом, что его фотоприемная плоскость расположена перпендикулярно оси 33 мачты 28, а ось 33 проходит через центр фотоприемной плоскости.
При этом беспроводный оптический канал 26 связи через вращающееся сочленение 27 выполнен в виде преломляющей призмы, смонтированной на второй площадке 32 таким образом, что луч света, попавший на фотообъектив по его оптической оси 34, преломляется в преломляющей призме на 90° и направляется в центр фотоприемного элемента 35 по оси мачты 28.
При этом бортовая вычислительная сеть 16 содержит головной контроллер 38, контроллер 39 управления первым электродвигателем 11, контроллер 40 управления вторым электродвигателем 12 и контроллер 41 управления третьим электродвигателем 30, объединенные через общую шину, при этом выходы контроллеров 39, 40 и 41 управления первым, вторым и третьим электродвигателями подключены к управляющим входам соответственно первого, второго и третьего электродвигателей 11, 12 и 30, соответствующие входы контроллера 39 управления первым электродвигателем 11 соединены с датчиком 13 угла поворота первого колеса 2 и датчиком 14 скорости вращения первого колеса 2, соответствующие входы контроллера 40 управления вторым электродвигателем 12 соединены с датчиком 20 угла поворота второго колеса 3 и датчиком 21 скорости вращения второго колеса 3, а соответствующий вход контроллера 41 управления третьим электродвигателем 30 соединен с датчиком 31 угла поворота второй площадки 32.
Мобильный робот, содержащий автономную навигационную систему для перемещения в среде с навигационными маркерными элементами по второму варианту, включает платформу 1, три колеса 2, 3 и 4, три колесных вала 5, 6 и 7 со смонтированными на них колесами 2, 3 и 4, установленные на платформе 1 три колесные вилки 8, 9 и 10, два электродвигателя 11 и 12, датчик 13 угла поворота первого колеса 2, датчик 14 скорости вращения первого колеса 2, источник питания 15 и бортовую вычислительную сеть 16, при этом колесный вал 5 первого колеса кинематически связан с выходным валом 17 первого электродвигателя 11, датчиком 13 угла поворота первого колеса и датчиком 14 скорости вращения первого колеса 2, а оси 18 и 19 колесных валов 5 и 6 первого 2 и второго 3 колес лежат на одной прямой, отличающийся тем, что в него дополнительно введены датчик 20 угла поворота второго колеса и датчик 21 скорости вращения второго колеса 3, кинематически связанные с колесным валом 6 второго колеса 3, кинематически связанным с выходным валом 22 второго электродвигателя 12, в качестве колесной вилки 10 третьего колеса 4 используют вилку «рояльного» типа, при этом в качестве навигационных маркерных элементов используют нанесенную на опорную плоскость светоконтрастную полосу, а автономная навигационная система выполнена с возможностью определения отклонения проекции точки середины передней кромки платформы 1 робота на опорную плоскость от средней линии 42 светоконтрастной полосы 43 и отклонения продольной оси 44 платформы 1 робота от касательной к средней линии 42 светоконтрастной полосы 43 в указанной точке.
При этом автономная навигационная система содержит стойки 45 и четвертый контроллер 46, установленные на платформе 1, кронштейн 47, визуальный датчик 48 обзора части 49 опорной плоскости перед передней кромкой платформы 1 робота, при этом визуальный датчик 48 установлен на кронштейне 47, смонтированном на стойках 45.
При этом визуальный датчик 48 содержит фотообъектив 50 с установленной в его фокусной плоскости фотоприемником, например, фотоприемной матрицей 51, выходы которой подключены к соответствующим входам четвертого контроллера 46.
Мобильный робот, содержащий автономную навигационную систему для перемещения в среде с навигационными маркерными элементами по первому варианту, работает следующим образом.
Головной контроллер 38 через контроллер 41 выдает сигнал на третий электродвигатель 30, который осуществляет круговое вращение второй площадки 32 с установленными на ней первым фотообъективом 24, входящим в состав оптического сканера 24 кругового обзора пространства, и преломляющей призмой беспроводного оптического канала 26 связи через вращающееся сочленение 27 (фиг.1).
При попадании оптического сигнала от светоизлучающего маяка 23 в поле зрения первого фотообъектива 24 и, пройдя через преломляющую призму беспроводного оптического канала 26 через вращающее сочленение 27, этот сигнал попадает на фотоприемный элемент 35, где преобразуется в электрический сигнал (фиг.5). Далее этот электрический сигнал, усилившись в усилителе 36, поступает на вход компаратора 37.
В процессе кругового сканирования пространства сигнал с выхода усилителя 36 изменяется. Так, до попадания в поле зрения фотообъектива 24 оптического сигнала от светоизлучающего маяка 23 этот сигнал определяется исключительно случайной шумовой составляющей (фиг.6б). А при попадании в поле зрения фотообъектива 24 протяженного в пространстве оптического сигнала от светоизлучающего маяка 23, сигнал начинает увеличиваться, затем некоторое время держится на примерно одинаковом уровне, а затем снова уменьшается до уровня шумовой составляющей (фиг.6б).
При достижении электрическим сигналом Uвх комп, равным Uвых ус, выбранного заранее уровня Uпорог порога срабатывания компаратора 37, компаратор 37 срабатывает и сигнал на его выходе Uвых комп меняет свое состояние с уровня логического "0" на уровень логической "1" (фиг.6б, фиг.6в). В этот момент времени контроллером 41 с третьего датчика угла поворота 31 осуществляется съем и фиксация значения угла α1 поворота второй площадки 32 относительно продольной оси 44 платформы 1.
При дальнейшем повороте площадки 32 компаратор 37 срабатывает снова, но сигнал на его выходе Uвых комп теперь меняет свое состояние с уровня логической "1" на уровень логического "0" (фиг.6б, фиг.6в). В этот момент времени контроллером 41 с третьего датчика угла поворота 31 также осуществляется съем и фиксация значения угла α2 поворота второй площадки 32 относительно продольной оси 44 платформы 1.
Данные о величинах углов α1 и α2 поступают в головной контроллер 38, в котором в соответствии с выражением
Ψ=(α1+α2)/2
вычисляется значение угла Ψ поворота платформы 1, при котором продольная ось 44 платформы 1 будет направлена на светоизлучающий маяк 23.
Подав от контроллеров 39 и 40 одинаковые по модулю, но противоположные по знаку управляющие сигналы на входы электродвигателей 11 и 12, обеспечивают поворот платформы 1 вокруг вертикальной оси, проходящей через точку пересечения осей 18 и 19 вращения колес 2 и 3 продольной оси 44 платформы 1. Эти управляющие сигналы действуют до достижения углом Ψ значения 0.
Мобильный робот, содержащий автономную навигационную систему для перемещения в среде с навигационными маркерными элементами по второму варианту, работает следующим образом.
Мобильный робот, с установленным на кронштейне 47 визуальным датчиком 48 обзора части опорной плоскости перед передней кромкой платформы 1 робота, размещают на опорной плоскости таким образом, что часть 49 опорной плоскости перед передней кромкой платформы 1 робота, находящейся в поле зрения визуального датчика 48 включает светоконтрастную полосу 43 (фиг.7).
Изображение светоконтрастной полосы 43 фокусируется вторым фотообъективом 50 на фотоприемную матрицу 51, установленную в фокусной плоскости второго фотообъектива 50 (фиг.10).
Из фиг.7, 10 и 11 очевидно, что движение мобильного робота по светоконтрастной полосе 43 может быть записано в виде одновременного выполнения двух условий:
- число ячеек фотоприемной матрицы 51, уровень сигнала с выхода которых превышает некоторый заранее заданный пороговый уровень слева от оси 52 фотоприемной матрицы 51 и справа от оси 52 равны между собой;
- угол γ между осью 52 фотоприемной матрицы 51 и средней линией 42 светоконтрастной полосы 43 равен 0.
Из фиг.11 также очевидно, что угол γ между осью 52 фотоприемной матрицы 51 и средней линией 42 светоконтрастной полосы 43 можно определить в соответствии с выражением
γ=arctg[(xпр-xлев)/(yпр-yлев)],
где
- xпр, yпр - координаты ячейки верхней строки фотоприемной матрицы 51, принадлежащей средней линии 42 светоконтрастной полосы 43 и находящейся справа от оси 52 фотоприемной матрицы 51;
- xпр, yпр - координаты ячейки нижней строки фотоприемной матрицы 51, принадлежащей средней линии 42 светоконтрастной полосы 43 и находящейся слева от оси 52 фотоприемной матрицы 51.
В соответствии с информацией, считываемой с ячеек фотоприемной матрицы 51 и обработанной четвертым контроллером 46 согласно вышеприведенному выражению, контроллерами 38, 39 и 40 формируются соответствующие управляющие сигналы на электродвигатели 11 и 12 колес 2 и 3 соответственно.
В связи с выбранной кинематической схемой мобильного робота он обладает повышенной маневренностью, а в связи с использованием в качестве маркерных элементов оптических источников информации - светоизлучающих маяков и светоконтрастной полосы, а в качестве считывающих элементов - визуальных датчиков (фотоприемных элементов), удается обеспечить функционирование мобильного робота независимо от уровня электромагнитных полей.
Таким образом, указанные отличительные особенности мобильного робота по первому и второму вариантам повышают его маневренность и обеспечивают возможность его движения по навигационным маркерным элементам независимо от уровня электромагнитных полей в отличие от мобильного робота, выбранного в качестве прототипа.
Проведенные заявителем патентные исследования показали, что аналогов предложенным существенным отличиям нет.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНЫЙ РОБОТ С БОРТОВОЙ ЛОКАЦИОННОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2010 |
|
RU2454314C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Программно-аппаратный комплекс для управления автономным мобильным роботом-погрузчиком | 2024 |
|
RU2825022C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| МОБИЛЬНЫЙ РОБОТ | 2010 |
|
RU2446937C2 |
| МОБИЛЬНЫЙ РОБОТ | 2014 |
|
RU2554835C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОГО ПЕРЕДВИЖЕНИЯ СМАРТФОНА ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2627555C2 |
| ТРАНСПОРТНЫЙ РОБОТ | 2010 |
|
RU2424891C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |

Изобретение относится к робототехнике. Мобильный робот содержит автономную навигационную систему для перемещения в среде с навигационными маркерными элементами, платформу, три колеса, установленные на платформе три колесные вилки, причем в качестве колесной вилки третьего колеса используют вилку «рояльного» типа, два электродвигателя, источник питания и бортовую вычислительную сеть. При использовании навигационных маркерных элементов в виде установленных на опорной плоскости светоизлучающих маяков автономная навигационная система выполнена с возможностью кругового сканирования пространства, а бортовая вычислительная сеть выполнена с возможностью сбора и обработки данных с датчиков угла поворота и датчиков скорости вращения первого и второго колес и формирования и передачи управляющих сигналов на электродвигатели первого и второго колес. При использовании навигационных маркерных элементов в виде нанесенной на опорную плоскость светоконтрастной полосы автономная навигационная система выполнена с возможностью определения отклонения проекции точки середины передней кромки платформы робота на опорную плоскость от средней линии светоконтрастной полосы и отклонения продольной оси платформы робота от касательной к средней линии светоконтрастной полосы в указанной точке. Предлагаемое изобретение направлено на повышение маневренности мобильного робота. 2 н. и 6 з.п. ф-лы, 11 ил.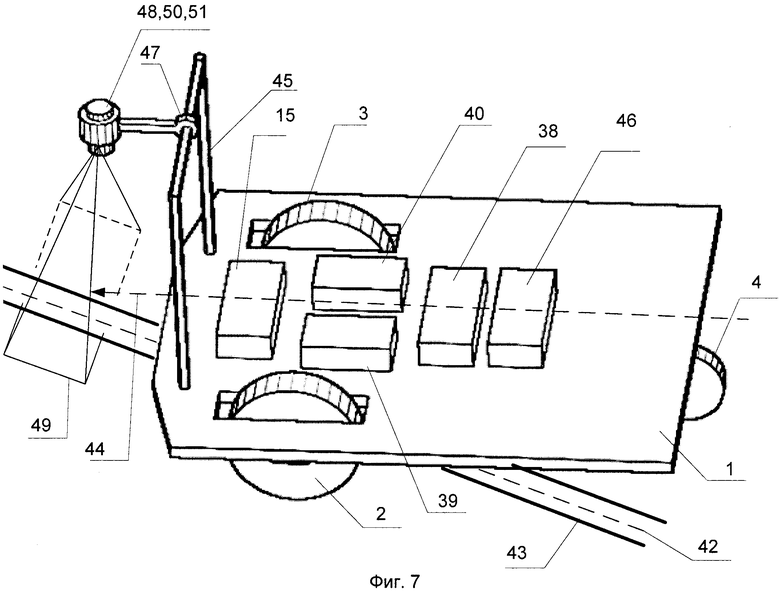
1. Мобильный робот, содержащий автономную навигационную систему для перемещения в среде с навигационными маркерными элементами, платформу, три колеса, три колесных вала со смонтированными на них упомянутыми колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой, отличающийся тем, что он снабжен датчиком угла поворота второго колеса и датчиком скорости вращения второго колеса, кинематически связанными с колесным валом второго колеса, кинематически связанным с выходным валом второго электродвигателя, при этом в качестве колесной вилки третьего колеса используют вилку «рояльного» типа, причем при использовании навигационных маркерных элементов в виде установленных на опорной плоскости светоизлучающих маяков автономная навигационная система выполнена с возможностью кругового сканирования пространства, а бортовая вычислительная сеть выполнена с возможностью сбора и обработки данных с датчиков угла поворота и датчиков скорости вращения первого и второго колес и формирования и передачи управляющих сигналов на электродвигатели первого и второго колес.
2. Мобильный робот по п.1, отличающийся тем, что автономная навигационная система состоит из двух частей, первая из которых содержит оптический сканер кругового обзора пространства, а вторая часть содержит узел приема и обработки сигнала с выхода оптического сканера кругового обзора пространства, при этом первая и вторая части автономной навигационной системы соединены между собой беспроводным оптическим каналом связи через вращающееся сочленение.
3. Мобильный робот по п.1, отличающийся тем, что в него введены установленная на платформе мачта, первая площадка, жестко закрепленная на мачте параллельно платформе, третий электродвигатель и третий датчик угла поворота, установленные на первой площадке, вторая площадка, установленная на мачте параллельно платформе с возможностью вращения в горизонтальной плоскости относительно вертикальной оси мачты и кинематически связанная с третьим электродвигателем и третьим датчиком угла поворота второй площадки, причем на второй площадке установлен оптический сканер кругового обзора пространства, например, фотообъектив, оптическая ось которого лежит в горизонтальной плоскости и пересекается с осью мачты, а узел приема и обработки сигнала с выхода оптического сканера кругового обзора пространства содержит фотоприемный элемент, например, фотодиод, и последовательно соединенные усилитель и компаратор, при этом выход фотоприемного элемента соединен со входом усилителя, а сам фотоприемный элемент смонтирован внутри мачты таким образом, что его фотоприемная плоскость расположена перпендикулярно оси мачты, а ось проходит через центр фотоприемной плоскости.
4. Мобильный робот по п.2, отличающийся тем, что беспроводной оптический канал связи выполнен в виде преломляющей призмы, смонтированной на установленной на мачте параллельно платформе второй площадке, с возможностью преломления луча света, попавшего на фотообъектив по его оптической оси, на 90° и его направления в центр фотоприемного элемента по оси мачты.
5. Мобильный робот по п.1, отличающийся тем, что бортовая вычислительная сеть содержит головной контроллер, контроллер управления первым электродвигателем, контроллер управления вторым электродвигателем и контроллер управления третьим электродвигателем, объединенные через общую шину, при этом выходы контроллеров управления первым, вторым и третьим электродвигателями подключены к управляющим входам соответственно первого, второго и третьего электродвигателей, соответствующие входы контроллера управления первым электродвигателем соединены с датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, соответствующие входы контроллера управления вторым электродвигателем соединены с датчиком угла поворота второго колеса и датчиком скорости вращения второго колеса, а соответствующий вход контроллера управления третьим электродвигателем соединен с датчиком угла поворота второй площадки.
6. Мобильный робот, содержащий автономную навигационную систему для перемещения в среде с навигационными маркерными элементами, платформу, три колеса, три колесных вала со смонтированными на них упомянутыми колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой, отличающийся тем, что он снабжен датчиком угла поворота второго колеса и датчиком скорости вращения второго колеса, кинематически связанными с колесным валом второго колеса, кинематически связанным с выходным валом второго электродвигателя, при этом в качестве колесной вилки третьего колеса используют вилку «рояльного» типа, причем при использовании навигационных маркерных элементов в виде нанесенной на опорную плоскость светоконтрастной полосы автономная навигационная система выполнена с возможностью определения отклонения проекции точки середины передней кромки платформы робота на опорную плоскость от средней линии светоконтрастной полосы и отклонения продольной оси платформы робота от касательной к средней линии светоконтрастной полосы в указанной точке.
7. Мобильный робот по п.6, отличающийся тем, что автономная навигационная система содержит стойки и контроллер, установленные на платформе, кронштейн, смонтированный на стойках, установленный на кронштейне визуальный датчик обзора части опорной плоскости перед передней кромкой платформы робота.
8. Мобильный робот по п.6 или 7, отличающийся тем, что визуальный датчик содержит фотообъектив с установленным в его фокусной плоскости фотоприемником, например, фотоприемной матрицей, выходы которой подключены к соответствующим входам контроллера.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ИСПОЛЬЗУЕМЫЙ В НЕМ СЕНСОРНЫЙ БЛОК | 1995 |
|
RU2130618C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И УГЛОВОЙ ОРИЕНТАЦИИ ТЕЛЕЖКИ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2303240C1 |
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| US 5219264 A1, 15.06.1993 | |||
| US 5534762 A1, 09.07.1996. | |||

