Изобретение относится к робототехнике и может найти применение в качестве мобильного робота и самодвижущейся транспортной тележки.
Известен транспортный робот, содержащий платформу со смонтированными на ней колесами, датчики параметров движения и бортовой компьютер (патент RU №2303240, 2006 г.). Недостатком является то, что данный робот обладает ограниченной маневренностью.
Наиболее близким к предлагаемому изобретению является транспортный робот, содержащий платформу, первое, второе и третье колесо, первый, второй и третий вал, со смонтированными на соответствующих валах первым, вторым и третьим колесами, установленные на платформе вилки первого, второго и третьего колеса со смонтированными в них с возможностью вращения относительно горизонтальных осей вилок валами первого, второго и третьего колес соответственно, причем вилка первого колеса установлена с возможностью поворота вокруг вертикальной оси, поворотный электродвигатель первого колеса, выходной вал которого кинематически связан с валом вилки первого колеса, и датчик угла поворота первого колеса, установленные на платформе маршевый электродвигатель первого колеса, выходной вал которого кинематически связан с валом первого колеса, датчик скорости вращения первого колеса и источник питания, а также бортовую вычислительную сеть (патент RU №2130618, 1994 г.).
Конструктивные особенности данного робота не позволяют ему разворачиваться на месте и осуществлять движение в произвольном направлении без предварительной ориентации робота, что ограничивает его маневренность в целом.
Предлагаемое изобретение направлено на повышение маневренности транспортного робота.
Указанный результат достигается тем, что в известный транспортный робот, содержащий платформу, первое, второе и третье колесо, первый, второй и третий вал, со смонтированными на соответствующих валах первым, вторым и третьим колесами, установленные на платформе вилки первого, второго и третьего колеса со смонтированными в них с возможностью вращения относительно горизонтальных осей вилок валами первого, второго и третьего колес соответственно, причем вилка первого колеса установлена с возможностью поворота вокруг вертикальной оси, поворотный электродвигатель первого колеса, выходной вал которого кинематически связан с валом вилки первого колеса, и датчик угла поворота первого колеса, установленные на платформе маршевый электродвигатель первого колеса, выходной вал которого кинематически связан с валом первого колеса, датчик скорости вращения первого колеса и источник питания, а также бортовую вычислительную сеть, дополнительно введены поворотные электродвигатели второго и третьего колеса, маршевые электродвигатели второго и третьего колеса, датчики угла поворота второго и третьего колеса, датчики скорости вращения второго и третьего колеса и беспроводный канал обмена данными, при этом вилка первого колеса, вилка второго колеса и вилка третьего колеса установлены на платформе с возможностью поворота вокруг вертикальной оси на произвольный угол и с возможностью передачи питающего напряжения от источника питания на вал вилки, при этом поворотные электродвигатели второго и третьего колес и датчики угла поворота второго и третьего колес установлены на платформе, а выходные валы поворотных электродвигателей второго и третьего колес кинематически связаны с валами вилок второго и третьего колес соответственно, при этом маршевые электродвигатели первого, второго и третьего колеса и датчики скорости вращения первого, второго и третьего колес кинематически связаны с валами вилок второго и третьего колес соответственно, бортовая вычислительная сеть выполнена распределенной и с возможностью сбора и обработки данных с датчиков угла поворота и датчиков скорости вращения первого, второго и третьего колеса и формирования и передачи управляющих сигналов на поворотные и маршевые электродвигатели первого, второго и третьего колеса, при этом первая часть элементов бортовой вычислительной сети установлена на платформе, а оставшаяся вторая часть - на вилках колес, при этом первая и вторая части элементов бортовой вычислительной сети соединены беспроводным каналом обмена данными.
Сущность заявляемого изобретения поясняется фиг.1 - 7.
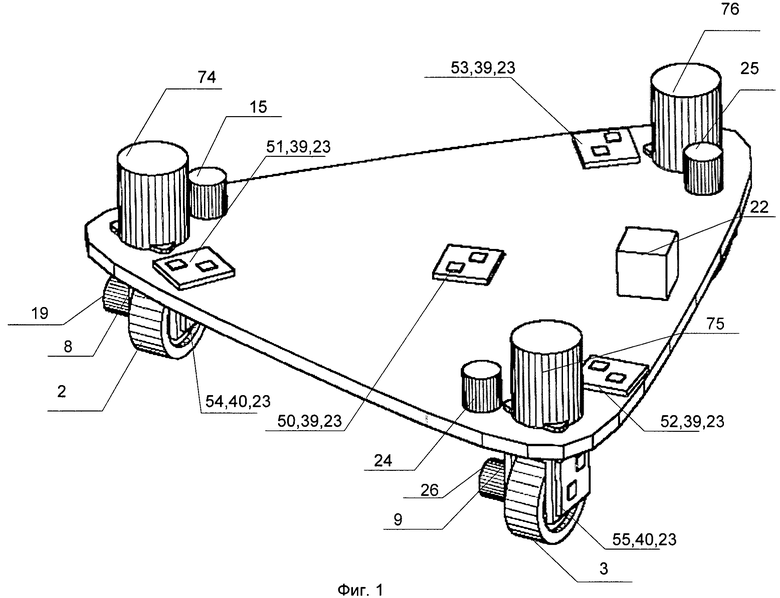
На фиг.1 изображен внешний вид транспортного робота.
На фиг.2 показан вид сверху на платформу робота с установленными на ней элементами при снятых кожухах.
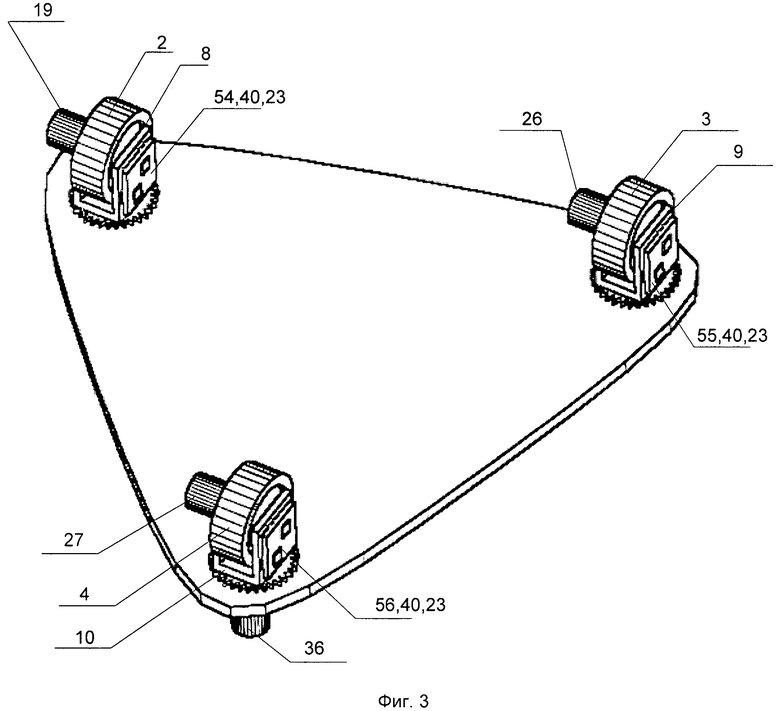
На фиг.3 - вид снизу на платформу робота с установленными на ней элементами.
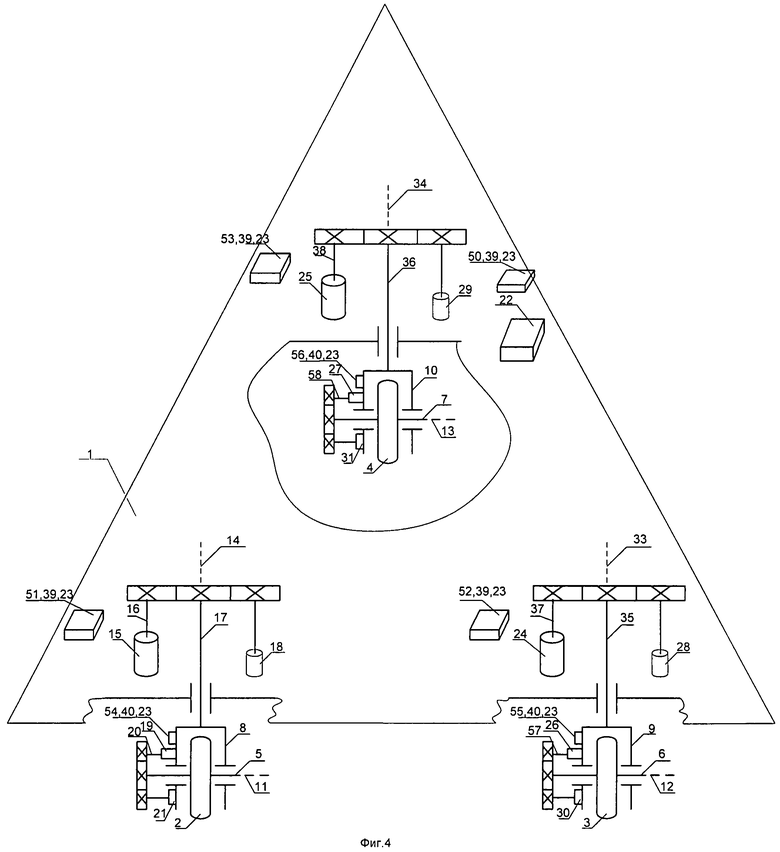
На фиг.4 приведена кинематическая схема транспортного робота.
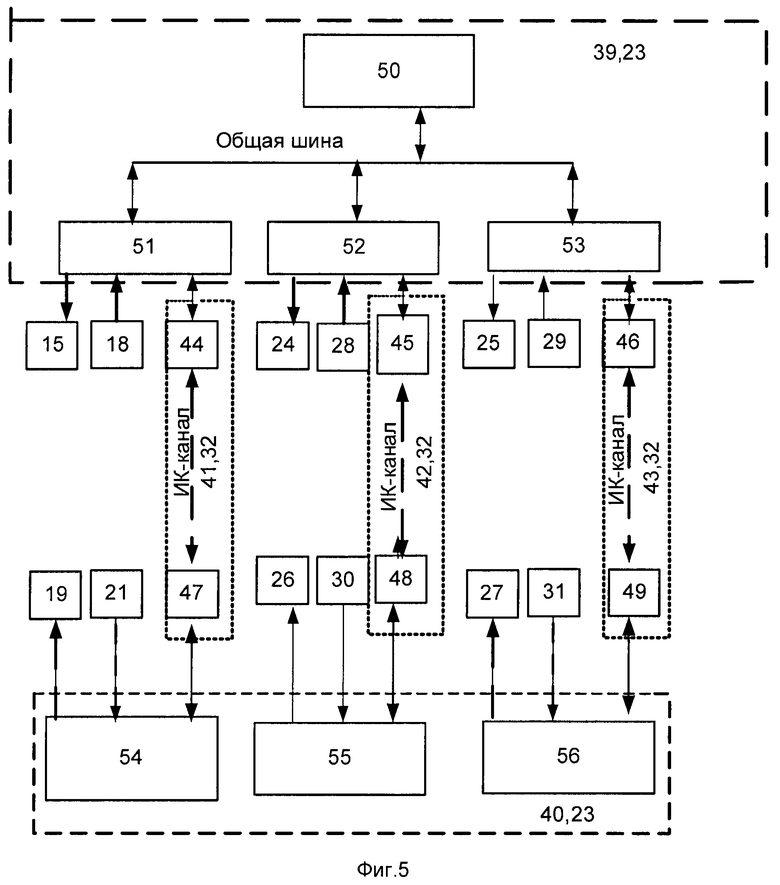
На фиг.5 приведена функциональная схема распределенной бортовой вычислительной сети с подключенными к ней датчиками и электродвигателями для первого варианта.
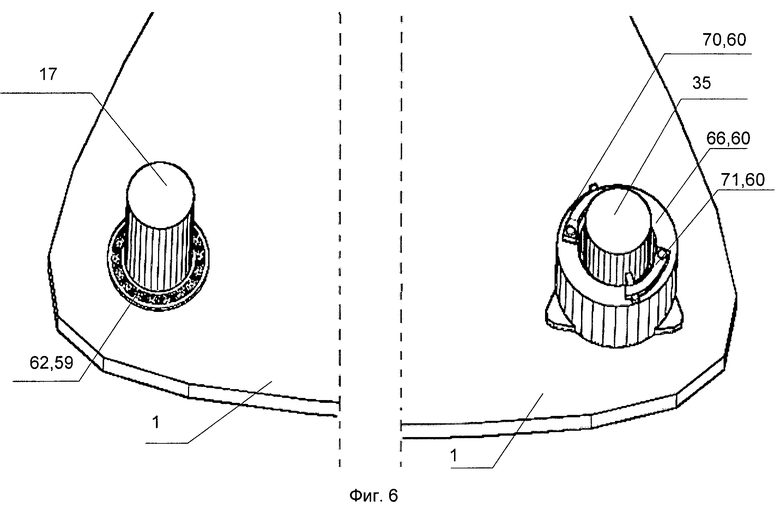
На фиг.6 - вариант конструктивного исполнения узла передачи электрического сигнала через вращающееся сочленение.
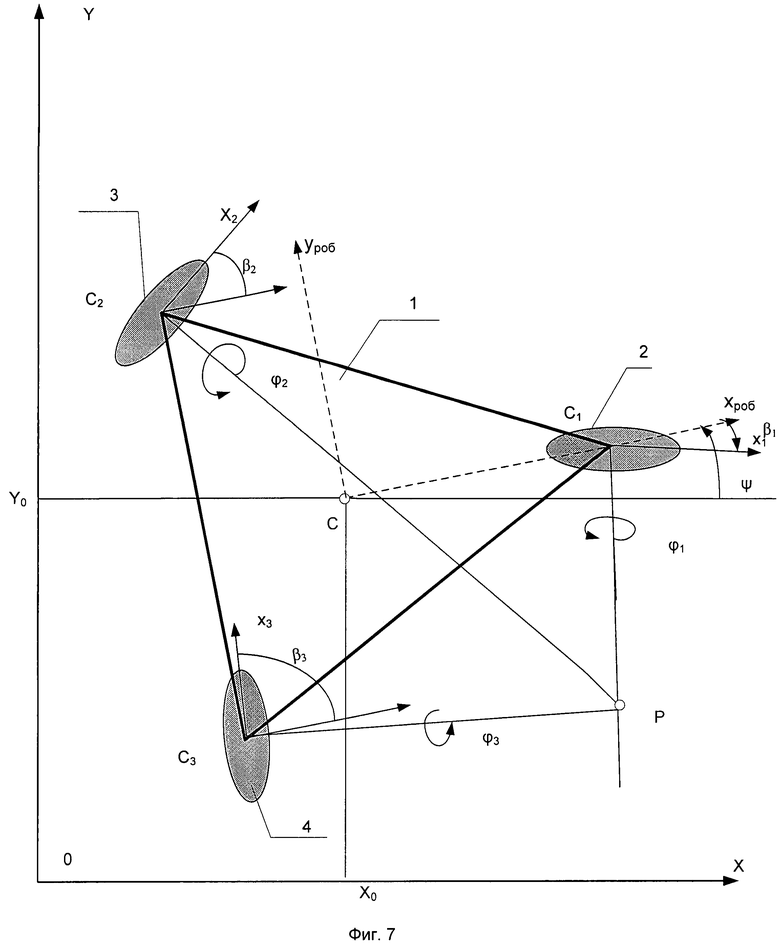
На фиг.7 изображена платформа транспортного робота и размещение самой платформы на опорной плоскости.
На фиг.1-7 обозначены: 1 - платформа; 2, 3 и 4 - соответственно первое, второе и третье колеса; 5, 6 и 7 - соответственно первый, второй и третий валы; 8, 9 и 10 - вилки первого, второго и третьего колес соответственно; 11, 12 и 13 - горизонтальные оси вилок первого, второго и третьего колес; 14 - вертикальная ось вилки первого колеса; 15 - поворотный электродвигатель первого колеса; 16 - выходной вал поворотного электродвигателя первого колеса; 17 - вал вилки первого колеса; 18 - датчик угла поворота первого колеса; 19 - маршевый электродвигатель первого колеса; 20 - выходной вал маршевого электродвигателя первого колеса; 21 - датчик скорости вращения первого колеса; 22 - источник питания; 23 - бортовая вычислительная сеть; 24 и 25 - поворотные электродвигатели второго и третьего колес соответственно; 26 и 27 - маршевые электродвигатели второго и третьего колес соответственно; 28 и 29 - датчики угла поворота второго и третьего колес соответственно; 30 и 31 - датчики скорости вращения второго и третьего колес соответственно; 32 - беспроводный канал обмена данными; 33 и 34 - вертикальная ось вилки второго и третьего колес соответственно; 35 и 36 - вал вилки второго и третьего колес соответственно; 37 и 38 - выходные валы поворотных электродвигателей второго и третьего колес соответственно; 39 и 40 - первая и соответственно вторая части элементов бортовой вычислительной сети; 41, 42 и 43 - соответственно первая, вторая и третья пара приемопередатчиков; 45, 45 и 46 - первые приемопередатчики первой, второй и третьей пар приемопередатчиков 41, 42 и 43 соответственно; 47, 48 и 49 - вторые приемопередатчики первой, второй и третьей пар приемопередатчиков 41, 42 и 43 соответственно; 50 - головной контроллер; 51, 52 и 53 - контроллеры управления поворотными электродвигателями первого, второго и третьего колес соответственно; 54, 55 и 56 - контроллеры управления маршевыми электродвигателями первого, второго и третьего колес соответственно; 57 и 58 - выходные валы второго и третьего маршевых электродвигателей; 59, 60 и 61 - первый, второй и третий узлы передачи электрического сигнала через вращающееся сочленение; 62, 63 и 64 - подшипник вала вилки первого, второго и третьего колес соответственно; 65, 66 и 67 - опора подшипника вала вилки первого, второго и третьего колес соответственно; 68 и 69, 70 и 71 и 72 и 73 - первая, вторая и третья пара токоподводящих щеток вала вилки первого, второго и третьего колес соответственно; 74, 75 и 76 - первый, второй и третий кожухи соответственно.
Транспортный робот содержит платформу 1, первое, второе и третье колеса 2, 3 и 4, первый, второй и третий вал 5, 6 и 7, со смонтированными на соответствующих валах 5, 6 и 7 первым, вторым и третьим колесами 2, 3 и 4, установленные на платформе 1 вилки первого, второго и третьего колес 8, 9 и 10 со смонтированными в них с возможностью вращения относительно горизонтальных осей 11, 12 и 13 вилок 8, 9 и 10 валами 5, 6 и 7 первого, второго и третьего колес 2, 3 и 4 соответственно, причем вилка 8 первого колеса 2 установлена с возможностью поворота вокруг вертикальной оси 14 первой вилки 8, установленный на платформе 1 поворотный электродвигатель 15 первого колеса, выходной вал 16 которого кинематически связан с валом 17 вилки 8 первого колеса 2, и датчик 18 угла поворота первого колеса 2, установленные на вилке 8 маршевый электродвигатель 19 первого колеса, выходной вал 20 которого кинематически связан с валом 5 первого колеса 2, и датчик скорости 21 вращения первого колеса 2, кинематически связанный с валом 5 первого колеса 2, и установленный на платформе 1 источник питания 22, а также бортовую вычислительную сеть 23.
Кроме того, транспортный робот содержит поворотные электродвигатели 24 и 25 второго и третьего колес 3 и 4, маршевые электродвигатели 26 и 27 второго и третьего колес 3 и 4, датчики 28 и 29 угла поворота второго и третьего колес 3 и 4, датчики 30 и 31 скорости вращения второго и третьего колес 3 и 4 и беспроводный канал 32 обмена данными, при этом вилка 8 первого колеса 2, вилка 9 второго колеса 3 и вилка 10 третьего колеса 4 установлены на платформе 1 с возможностью поворота вокруг вертикальной оси 14, 33 и 34 соответствующей вилки 8, 9 и 10 на произвольный угол и с возможностью передачи питающего напряжения от источника питания 22 на вал 17, 35 и 36 соответствующей вилки 8, 9 и 10, при этом проекции точек пересечения вертикальных осей 14, 33 и 34 валов 17, 35 и 36 вилок 8, 9 и 10 и горизонтальных осей 11, 12 и 13 валов 5, 6 и 7 соответствующих колес 2, 3 и 4 на горизонтальную плоскость расположены в вершинах равностороннего треугольника, при этом поворотные электродвигатели 24 и 25 второго и третьего колес 3 и 4 и датчики 28 и 29 угла поворота второго и третьего колес 3 и 4 установлены на платформе 1, а выходные валы 37 и 38 поворотных электродвигателей 24 и 25 второго и третьего колес 3 и 4 кинематически связаны с валами 35 и 36 вилок 9 и 10 второго и третьего колес 3 и 4 соответственно, при этом маршевые электродвигатели 19, 26 и 27 первого, второго и третьего колес 2, 3 и 4 и датчики 21, 30 и 31 скорости вращения первого, второго и третьего колес 2, 3 и 4 кинематически связаны с валами 5, 6 и 7 первого, второго и третьего колес 2, 3 и 4 соответственно, бортовая вычислительная сеть 23 выполнена распределенной и с возможностью сбора и обработки данных с датчиков 18, 28 и 29 угла поворота и датчиков 21, 30 и 31 скорости вращения первого, второго и третьего колес 2, 3 и 4 и формирования и передачи управляющих сигналов на поворотные 15, 24 и 25 и маршевые 19, 26 и 27 электродвигатели первого, второго и третьего колес 2, 3 и 4, при этом первая часть 39 элементов бортовой вычислительной сети 23 установлена на платформе 1, а оставшаяся вторая часть 40 - на вилках колес 2, 3 и 4, при этом первая и вторая части 39 и 40 элементов бортовой вычислительной сети 23 соединены беспроводным каналом 32 обмена данными.
Беспроводной канал 32 обмена данными содержит первую, вторую и третью пары приемопередатчиков 41, 42 и 43, при этом первые приемопередатчики 44, 45 и 46 первой, второй и третьей пар 41, 42 и 43 приемопередатчиков смонтированы на платформе 1, а вторые приемопередатчики 47, 48 и 49 из первой, второй и третьей пар 41, 42 и 43 приемопередатчиков смонтированы на валах 17, 35 и 36 вилок 8, 9 и 10 первого, второго и третьего колес 2, 3 и 4 соответственно, с возможностью взаимодействия с первыми 44, 45 и 46 приемопередатчиками соответствующей пары 41, 42 и 43 приемопередатчиков.
Первая часть 39 элементов бортовой вычислительной сети 23 содержит головной контроллер 50 и контроллеры 51, 52 и 53 управления поворотными электродвигателями 15, 24 и 25 первого, второго и третьего колес 2, 3 и 4, а вторая часть 40 элементов бортовой вычислительной сети 23 содержит контроллеры 54, 55 и 56 управления маршевыми электродвигателями 19, 26 и 27 первого, второго и третьего колес 2, 3 и 4.
Выходные валы 57 и 58 второго и третьего маршевых электродвигателей 26 и 27 кинематически связаны с валами 6 и 7 второго и третьего колес 3 и 4 соответственно, управляющие входы первого, второго и третьего маршевых электродвигателей 19, 26 и 27 подключены к управляющим выходам контроллеров 54, 55 и 56, подключенных также к датчикам 21, 30 и 31 скорости вращения первого, второго и третьего колес 2, 3 и 4 соответственно, а управляющие входы первого, второго и третьего поворотных электродвигателей 15, 24 и 25 подключены к управляющим выходам контроллеров 51, 52 и 53, подключенных также к датчикам 18, 28 и 29 угла поворота первого, второго и третьего колес 2, 3 и 4 соответственно.
В качестве приемопередатчиков 44-49 используют приемопередатчики инфракрасного излучения.
Установленная на платформе 1 с возможностью передачи питающего напряжения от источника питания 22 на вал 17, 35 и 36 вилки 8, 9 и 10, вилка 8, 9 и 10 каждого колеса оснащена соответствующим узлом 59, 60 и 61 передачи электрического сигнала через вращающееся сочленение, при этом каждый узел 59, 60 и 61 передачи электрического сигнала через вращающееся сочленение содержит смонтированный на платформе 1 подшипник 62, 63 и 64 с установленным в нем валом 17, 35 и 36 вилки 8, 9 и 10 и опору 65, 66 и 67, и токоподводящие щетки 68 и 69, 70 и 71, и 72 и 73, установленные на соответствующем валу 17, 35 и 36 с возможностью электрического контакта с соответствующей опорой 65, 66 и 67, электрически соединенной с источником питания 22.
Транспортный робот функционирует следующим образом.
Головной контроллер 50 задает сигналы требуемых углов поворота и скоростей вращения колес 2, 3 и 4. Эти сигналы преобразуются контроллерами 51, 52 и 53 управления поворотными электродвигателями и контроллерами 54, 55 и 56 управления маршевыми электродвигателями в управляющие сигналы поворотных электродвигателей 15, 24 и 25 и маршевых электродвигателей 19, 26 и 27 соответственно.
Текущие значения углов поворота колес 2, 3 и 4 измеряются датчиками 18, 28 и 29 углов поворота колес и передаются в контроллеры 51, 52 и 53, где сравниваются с требуемыми значениями. Аналогично, текущие значения скоростей вращения колес 2, 3 и 4 измеряются датчиками скорости вращения 21, 30 и 31 и передаются в контроллеры 54, 55 и 56, где сравниваются с заданными значениями скоростей.
Контроллеры 54, 55 и 56, управляющие маршевыми двигателями 19, 26 и 27 колес 2, 3 и 4, установлены непосредственно на вилках 8, 9 и 10 колес 2, 3 и 4, а их связь с контроллерами 51, 52 и 53 первой части 39 элементов бортовой вычислительной сети 23, размещенными на платформе 1, осуществляется посредством инфракрасных каналов 41, 42 и 43, образованных парами ИК-приемопередатчиков 44 и 47, 45 и 48, 46 и 49.
Передача питания от источника питания 22 на маршевые электродвигатели 19, 26 и 27 осуществляется с помощью соответствующих пар токоподводящих скользящих щеток 68 и 69, 70 и 71, и 72 и 73, размещаемых на вертикальном валу 17, 35 и 36 вилки 8, 9 и 10.
Таким образом, благодаря размещению осей 14, 33 и 34 вилок 8, 9 и 10 в вершинах равностороннего треугольника, обеспечению передачи питания на маршевые электродвигатели 19, 26 и 27 через узлы 59, 60 и 61 передачи электрического сигнала через вращающееся сочленение и осуществлению обмена информацией между контроллерами 50-56 бортовой вычислительной сети 23 по беспроводному каналу 32 обмена данными, удается обеспечить транспортному роботу расширенные кинематические возможности по сравнению с транспортным роботом, выбранным в качестве прототипа.
Для данного транспортного робота движение центра платформы 1 и ее угловое движение можно сделать независимыми, например, заставить перемещаться платформу 1 поступательно, не меняя ее ориентации, вращаться на месте и т.д.
А все это в целом повышает маневренность транспортного робота.
Проведенные заявителем патентные исследования показали, что аналогов приведенным существенным отличиям нет.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНЫЙ РОБОТ С БОРТОВОЙ ЛОКАЦИОННОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2010 |
|
RU2454314C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| МОБИЛЬНЫЙ РОБОТ С АВТОНОМНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2010 |
|
RU2454313C2 |
| МОБИЛЬНЫЙ РОБОТ | 2010 |
|
RU2446937C2 |
| МОБИЛЬНЫЙ РОБОТ | 2014 |
|
RU2554835C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОГО ПЕРЕДВИЖЕНИЯ СМАРТФОНА ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2627555C2 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
| Конструктор для сборки робота | 2019 |
|
RU2729473C1 |
Изобретение относится к робототехнике, в частности транспортным роботам, и может быть использовано в качестве мобильного робота или самодвижущейся транспортной тележки. Транспортный робот содержит платформу 1, колеса 2, 3 и 4, поворотные электродвигатели 15, 24 и 25, маршевые электродвигатели 19, 26 и 27 и вилки 8, 9 и 10 колес 2, 3 и 4. Вилки 8, 9 и 10 установлены на платформе 1 в вершинах равностороннего треугольника. Транспортный робот содержит также источник питания 22 и бортовую вычислительную сеть 23, включающую установленные на платформе 1 головной контроллер 50 и контроллеры 51, 52 и 53 управления поворотными электродвигателями и установленные на вилках соответствующих колес 2, 3 и 4 контроллеры 54, 55 и 56 управления маршевыми электродвигателями 19, 26 и 27, беспроводной канал 32 обмена данными между контроллерами бортовой вычислительной сети 23 и три узла 62, 63 и 64 передачи электрического сигнала через вращающееся сочленение от источника питания 22 на контроллеры 54, 55 и 56 управления маршевыми электродвигателями. Изобретение обеспечивает повышение маневренности транспортного робота. 5 з.п. ф-лы, 7 ил.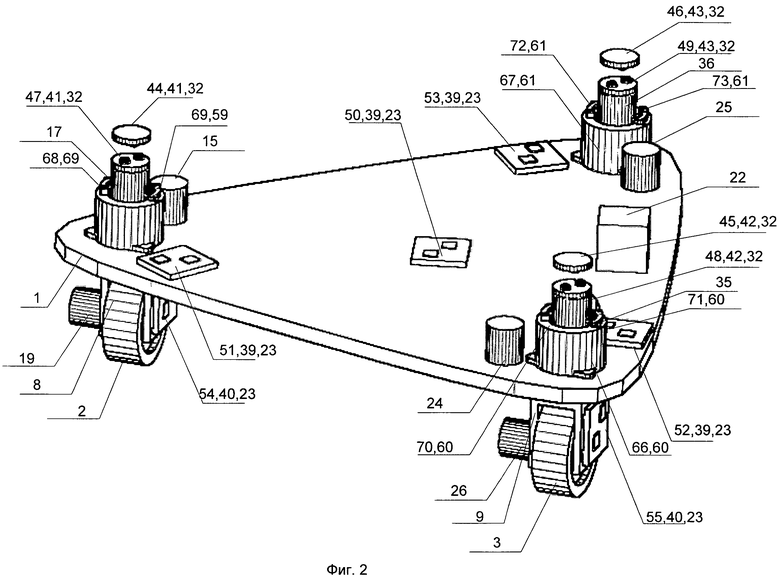
1. Транспортный робот, содержащий платформу, первое, второе и третье колеса, первый, второй и третий валы со смонтированными на соответствующих валах первым, вторым и третьим колесами, установленные на платформе вилки первого, второго и третьего колес с смонтированными в них с возможностью вращения относительно горизонтальных осей вилок валами первого, второго и третьего колес соответственно, причем вилка первого колеса установлена с возможностью поворота вокруг вертикальной оси, поворотный электродвигатель первого колеса, выходной вал которого кинематически связан с валом вилки первого колеса, и датчик угла поворота первого колеса, установленные на платформе маршевый электродвигатель первого колеса, выходной вал которого кинематически связан с валом первого колеса, датчик скорости вращения первого колеса и источник питания, а также бортовую вычислительную сеть, отличающийся тем, что в него дополнительно введены поворотные электродвигатели второго и третьего колес, маршевые электродвигатели второго и третьего колес, датчики угла поворота второго и третьего колес, датчики скорости вращения второго и третьего колес и беспроводный канал обмена данными, при этом вилка первого колеса, вилка второго колеса и вилка третьего колеса установлены на платформе с возможностью поворота вокруг вертикальной оси на произвольный угол и с возможностью передачи питающего напряжения от источника питания на вал соответствующей вилки, при этом проекции точек пересечения вертикальных осей валов вилок и горизонтальных осей валов соответствующих колес на горизонтальную плоскость расположены в вершинах равностороннего треугольника, при этом поворотные электродвигатели второго и третьего колес и датчики угла поворота второго и третьего колес установлены на платформе, а выходные валы поворотных электродвигателей второго и третьего колес кинематически связаны с валами вилок второго и третьего колес соответственно, при этом маршевые электродвигатели первого, второго и третьего колес и датчики скорости вращения первого, второго и третьего колес кинематически связаны с валами вилок второго и третьего колес соответственно, бортовая вычислительная сеть выполнена распределенной и с возможностью сбора и обработки данных с датчиков угла поворота и датчиков скорости вращения первого, второго и третьего колес и формирования и передачи управляющих сигналов на поворотные и маршевые электродвигатели первого, второго и третьего колес, при этом первая часть элементов бортовой вычислительной сети установлена на платформе, а оставшаяся вторая часть - на вилках колес, при этом первая и вторая части элементов бортовой вычислительной сети соединены беспроводным каналом обмена данными.
2. Транспортный робот по п.1, отличающийся тем, что беспроводной канал обмена данными содержит первую, вторую и третью пары приемопередатчиков, при этом первые приемопередатчики из первой, второй и третьей пар приемопередатчиков смонтированы на платформе, а вторые приемопередатчики из первой, второй и третьей пар приемопередатчиков смонтированы на поворотных вилках первого, второго и третьего колес соответственно с возможностью взаимодействия с первыми приемопередатчиками соответствующей пары приемопередатчиков.
3. Транспортный робот по п.1, отличающийся тем, что первая часть элементов бортовой вычислительной сети содержит головной контроллер и контроллеры управления поворотными электродвигателями первого, второго и третьего колес, а вторая часть элементов бортовой вычислительной сети содержит контроллеры управления маршевыми электродвигателями первого, второго и третьего колес.
4. Транспортный робот по п.1, отличающийся тем, что выходные валы второго и третьего маршевых электродвигателей кинематически связаны с валами и второго и третьего колес соответственно, управляющие входы первого, второго и третьего маршевых электродвигателей подключены к управляющим выходам контроллеров, подключенных также к датчикам скорости вращения первого, второго и третьего колес соответственно, а управляющие входы первого, второго и третьего поворотных электродвигателей подключены к управляющим выходам контроллеров, подключенных также к датчикам угла поворота первого, второго и третьего колес соответственно.
5. Транспортный робот по п.1 или 2, отличающийся тем, что в качестве приемопередатчиков используют приемопередатчики инфракрасного излучения.
6. Транспортный робот по п.1, отличающийся тем, что установленная на платформе с возможностью передачи питающего напряжения от источника питания на вал вилки вилка каждого колеса оснащена соответствующим узлом передачи электрического сигнала через вращающееся сочленение, при этом каждый узел передачи электрического сигнала через вращающееся сочленение содержит смонтированный на платформе подшипник с установленным в нем валом вилки и опору, и токоподводящие щетки, установленные на соответствующем валу с возможностью электрического контакта с соответствующей опорой, электрически соединенной с источником питания.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ИСПОЛЬЗУЕМЫЙ В НЕМ СЕНСОРНЫЙ БЛОК | 1995 |
|
RU2130618C1 |
| RU 2005120656 А, 20.01.2006 | |||
| US 2006045697 A1, 09.06.2004 | |||
| Транспортный робот | 1987 |
|
SU1662836A2 |
| Транспортный робот | 1987 |
|
SU1452738A1 |
| Транспортная тележка | 1983 |
|
SU1139659A1 |

