Изобретение относится к робототехнике и может найти применение в качестве мобильного робота и самодвижущейся транспортной тележки для использования в цехах промышленных предприятий.
Известен мобильный робот, содержащий платформу со смонтированными на ней колесами, датчики параметров движения и бортовой компьютер (патент RU №2303240, 2006 г.).
Недостатком является то, что данный мобильный робот обладает ограниченной маневренностью.
Наиболее близким к предлагаемому изобретению является мобильный робот, содержащий платформу, три колеса, три колесных вала со смонтированными на них колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой (патент RU №2130618, 1994 г.).
Недостатком прототипа является то, что конструктивные особенности дачного мобильного робота не позволяют ему разворачиваться на месте и осуществлять движение в произвольном направлении без его предварительной ориентации, что ограничивает его маневренность в целом.
Заявленное изобретение направлено на повышение маневренности мобильного робота.
Указанный результат достигается тем, что в известный мобильный робот, содержащий платформу, три колеса, три колесных вала со смонтированными на них колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой, дополнительно введены датчик угла поворота второго колеса и датчик скорости вращения второго колеса, кинематически связанные с колесным валом второго колеса, кинематически связанным с выходным валом второго электродвигателя, в качестве колесной вилки третьего колеса используют вилку «рояльного» типа, при этом бортовая вычислительная сеть выполнена с возможностью сбора и обработки данных с датчиков угла поворота и датчиков скорости вращения первого и второго колеса и формирования и передачи управляющих сигналов на электродвигатели первого и второго колеса.
Обоснование существенности отличительных признаков.
Сущность изобретения поясняется чертежами фиг.1-4.
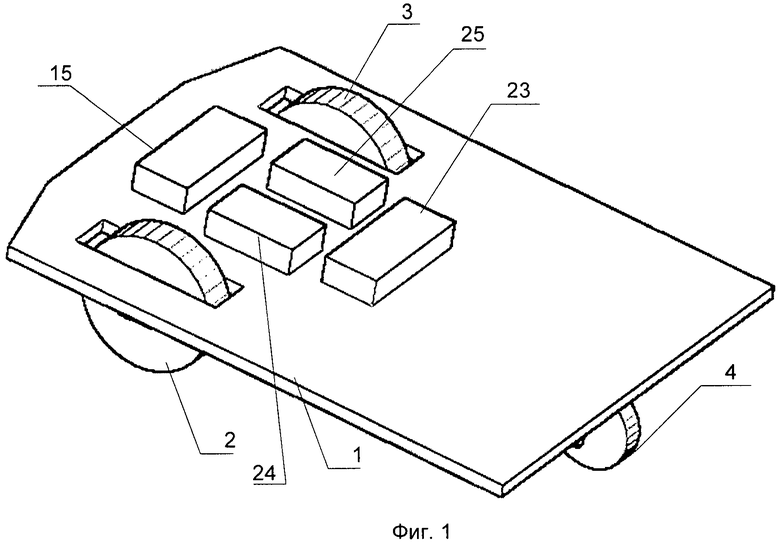
На фиг.1 изображен внешний вид мобильного робота.
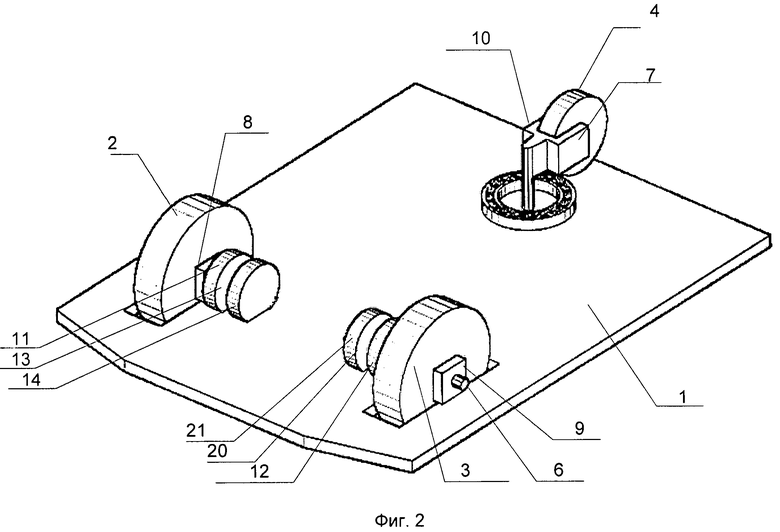
На фиг.2 изображен внешний вид платформы мобильного робота с установленными на ней элементами (вид снизу).
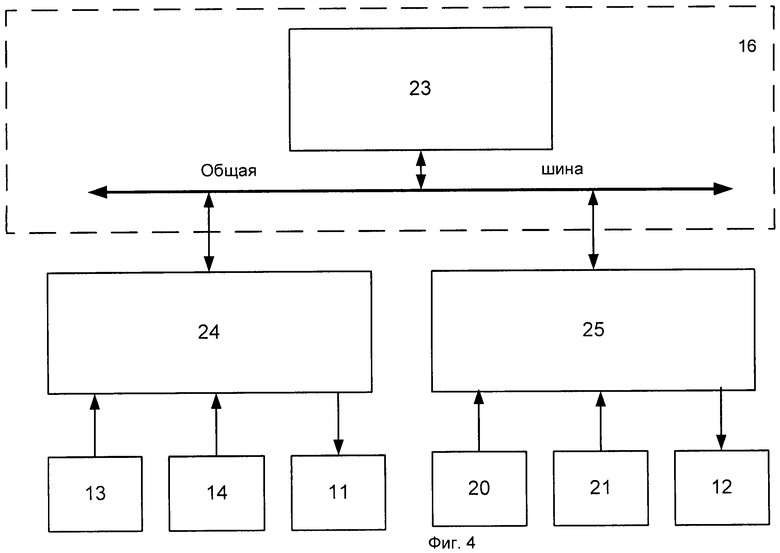
На фиг.3 приведена кинематическая схема мобильного робота, а на фиг.4 - функциональная схема бортовой вычислительной сети мобильного робота с подключенными к ней элементами.
На фиг.1-4 обозначены: 1 - платформа; 2, 3 и 4 - первое, второе и третье колесо соответственно; 5, 6 и 7 - колесные валы первого, второго и третьего колеса соответственно; 8, 9 и 10 - колесные вилки первого, второго и третьего колеса соответственно; 11 и 12 - электродвигатели первого и второго колеса соответственно; 13 - датчик угла поворота первого колеса; 14 - датчик скорости вращения первого колеса; 15 - источник питания; 16 - бортовая вычислительная сеть; 17 - выходной вал первого электродвигателя; 18 и 19 - оси колесных валов первого и второго колеса соответственно; 20 - датчик угла поворота второго колеса; 21 - датчик скорости вращения второго колеса; 22 - выходной вал второго электродвигателя; 23 - головной контроллер; 24 и 25 - контроллер управления первым 11 и вторым 12 электродвигателем соответственно.
Мобильный робот содержит платформу 1, три колеса 2, 3 и 4, три колесных вала 5, 6 и 7 со смонтированными на них колесами 2, 3 и 4, установленные на платформе 1 три колесные вилки 8, 9 и 10, два электродвигателя 11 и 12, датчик 13 угла поворота первого колеса 2, датчик 14 скорости вращения первого колеса 2, источник питания 15 и бортовую вычислительную сеть 16, при этом колесный вал 5 первого колеса 2 кинематически связан с выходным валом 17 первого электродвигателя 11, датчиком 13 угла поворота первого колеса и датчиком 14 скорости вращения первого колеса 2, а оси 18 и 19 колесных валов 5 и 6 первого 2 и второго 3 колес лежат на одной прямой. Кроме того, робокар содержит датчик 20 угла поворота второго колеса 3 и датчик 21 скорости вращения второго колеса 3, кинематически связанные с колесным валом 6 второго колеса 3, кинематически связанным с выходным валом 22 второго электродвигателя 12, в качестве колесной вилки 10 третьего колеса 4 используют вилку «рояльного» типа, а бортовая вычислительная сеть 16 выполнена с возможностью сбора и обработки данных с датчиков 13 и 20 угла поворота и датчиков 14 и 21 скорости вращения первого и второго колеса 2 и 3 и формирования и передачи управляющих сигналов на электродвигатели 11 и 12 первого и второго колеса 2 и 3.
Мобильный робот функционирует следующим образом.
Головной контроллер 23 задает сигналы требуемых углов поворота и скоростей вращения колес 2 и 3. Эти сигналы преобразуются контроллерами 24 и 25 управления электродвигателями 11 и 12 в управляющие сигналы электродвигателей 11 и 12 соответственно.
Текущие значения углов поворота колес 2 и 3 измеряются датчиками 13 и 20 углов поворота колес 2 и 3 и передаются в контроллеры 24 и 25, где сравниваются с требуемыми значениями. Аналогично, текущие значения скоростей вращения колес 2 и 3 измеряются датчиками скорости вращения 14 и 21 и передаются в контроллеры 24 и 25, где сравниваются с заданными значениями скоростей.
На основании рассогласования между заданными и текущими значениями углов поворота и скоростей вращения электродвигателей 11 и 12 контроллерами 24 и 25 формируются управляющие сигналы, которые передаются на электродвигатели 11 и 12 первого и второго колеса 2 и 3.
Таким образом, благодаря введению в состав мобильного робота датчика 20 угла поворота второго колеса 3 и датчика 21 скорости вращения второго колеса 3, кинематически связанных с колесным валом 6 второго колеса 3, кинематически связанным с выходным валом 22 второго электродвигателя 12, использованию в качестве колесной вилки 10 третьего колеса 4 вилки «рояльного» типа и выполнению бортовой вычислительной сети 16 с возможностью сбора и обработки данных с датчиков 13 и 20 угла поворота и датчиков 14 и 21 скорости вращения первого и второго колеса 2 и 3 и формирования и передачи управляющих сигналов на электродвигатели 11 и 12 первого и второго колеса 2 и 3 удается обеспечить мобильному роботу расширенные кинематические возможности по сравнению с мобильным роботом, выбранным в качестве прототипа.
А все это в целом повышает маневренность мобильного робота.
Проведенные заявителем патентные исследования показали, что аналогов приведенным существенным отличиям нет.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТ С АВТОНОМНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2010 |
|
RU2454313C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| ТРАНСПОРТНЫЙ РОБОТ | 2010 |
|
RU2424891C1 |
| ТРАНСПОРТНЫЙ РОБОТ С БОРТОВОЙ ЛОКАЦИОННОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2010 |
|
RU2454314C2 |
| МОБИЛЬНЫЙ РОБОТ | 2014 |
|
RU2554835C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОГО ПЕРЕДВИЖЕНИЯ СМАРТФОНА ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2627555C2 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| Конструктор для сборки робота | 2019 |
|
RU2729473C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ НАГРУЖЕННОГО МОБИЛЬНОГО РОБОТА ПРИ НАЛИЧИИ ПРОСКАЛЬЗЫВАНИЯ КОЛЁС | 2017 |
|
RU2670352C1 |
Изобретение относится к робототехнике и может найти применение в качестве мобильного робота и самодвижущейся транспортной тележки для использования в цехах промышленных предприятий. Мобильный робот содержит платформу, три колеса, три колесных вала со смонтированными на них колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть. Колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой. В него дополнительно введены датчик угла поворота второго колеса и датчик скорости вращения второго колеса, кинематически связанные с колесным валом второго колеса, кинематически связанным с выходным валом второго электродвигателя. В качестве колесной вилки третьего колеса используют вилку «рояльного» типа. При этом бортовая вычислительная сеть выполнена с возможностью сбора и обработки данных с датчиков угла поворота и датчиков скорости вращения первого и второго колеса и формирования и передачи управляющих сигналов на электродвигатели первого и второго колеса. Предлагаемое изобретение направлено на повышение маневренности мобильного робота. 4 ил.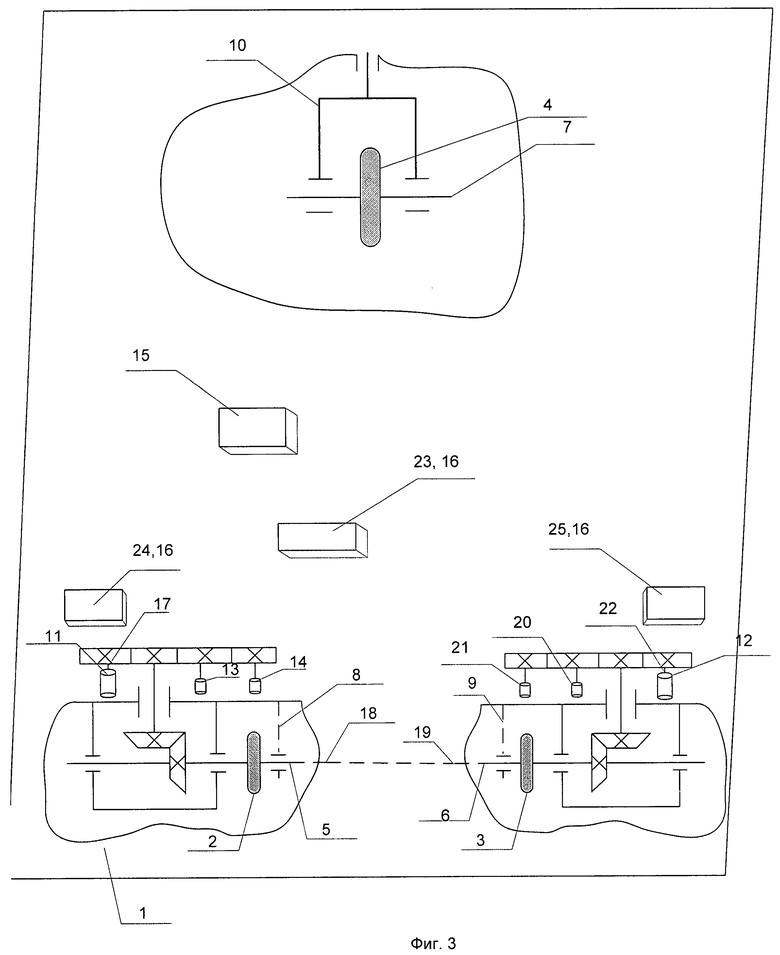
Мобильный робот, содержащий платформу, три колеса, три колесных вала со смонтированными на них колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой, отличающийся тем, что в него дополнительно введены датчик угла поворота второго колеса и датчик скорости вращения второго колеса, кинематически связанные с колесным валом второго колеса, кинематически связанным с выходным валом второго электродвигателя, в качестве колесной вилки третьего колеса используют вилку «рояльного» типа, при этом бортовая вычислительная сеть выполнена с возможностью сбора и обработки данных с датчиков угла поворота и датчиков скорости вращения первого и второго колес и формирования и передачи управляющих сигналов на электродвигатели первого и второго колес.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И ИСПОЛЬЗУЕМЫЙ В НЕМ СЕНСОРНЫЙ БЛОК | 1995 |
|
RU2130618C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И УГЛОВОЙ ОРИЕНТАЦИИ ТЕЛЕЖКИ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2303240C1 |
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| US 5219264 A1, 15.06.1993 | |||
| US 5534762 A1, 09.07.1996. | |||

