Область техники
Изобретение относится к контрольно-измерительной технике, в частности, для измерения деформаций (напряжений) в различных конструкциях посредством поляризационно-оптических преобразователей и может быть использовано в строительстве, на транспорте, в промышленных производствах, в контрольно-измерительной аппаратуре.
Уровень техники
Известно, что пьезооптические преобразователи, используемые для измерения деформаций (напряжений), обладают наибольшей чувствительностью по сравнению с другими, например с тензорезистивными преобразователями (Слезингер И.И. Пьезооптические измерительные преобразователи. Измерительная техника, 1985, №11, с.45-48) [1].
Наиболее близким по технической сущности к предлагаемому тензометрическому датчику является пьезооптический тензометрический преобразователь (Заявка на патент №2010116023 от 23.04.2010, решение о выдаче патента от 02.02.2011) [2]. Преобразователь состоит из нагрузочного элемента, закрепляемого на контролируемом объекте, пьезооптического преобразователя, преобразующего величину напряжений на фотоупругом элементе в электрический сигнал, и блока обработки сигнала. Нагрузочный элемент представляет собой пластину, обеспечивающую концентрацию напряжений на фотоупругом элементе, фотоупругий элемент закреплен в пластине в заведомо нагруженном состоянии и таким образом, что действие исходной силовой нагрузки осуществляется в двух взаимно перпендикулярных направлениях.
Недостатком данного тензометрического преобразователя является то, что он позволяет измерять деформации, возникающие только в направлении оси пластины. Преобразователь не чувствителен к деформациям, возникающим в направлении, перпендикулярном оси пластины. Другим недостатком преобразователя является то, что при отсутствии внешних деформаций, но при разных коэффициентах температурного расширения материалов пластины и контролируемого объекта, в преобразователе будут возникать напряжения (сигнал), связанные с изменением температуры преобразователя и контролируемого объекта.
Раскрытие изобретения
Задача изобретения заключается в создании тензометрического датчика, который с одинаково высокой чувствительностью измеряет деформации, возникающие в двух взаимно перпендикулярных направлениях, и в котором за счет конструкции достигается эффект термокомпенсации, в том числе для случая использования различных материалов нагрузочного элемента и контролируемого объекта.
Технический результат - расширение функциональных возможностей, упрощение конструкции, повышение ее надежности и точности измерения деформаций.
Поставленная задача решена за счет того, что в известном устройстве, включающем нагрузочный элемент, закрепляемый на контролируемом объекте, и пьезооптический преобразователь, преобразующий в электрический сигнал величину напряжений на фотоупругом элементе, который закреплен в заведомо нагруженном состоянии и таким образом, что действие исходной силовой нагрузки осуществляется в двух взаимно перпендикулярных направлениях, и блок обработки сигнала, согласно изобретению нагрузочный элемент представляет собой полый цилиндр с четырьмя продольными разрезами, не нарушающими целостности цилиндра, а фотоупругий элемент пьезооптического преобразователя закреплен в цилиндре таким образом, что оптическая ось пьезооптического преобразователя совпадает с осью цилиндра и перпендикулярна плоскости измеряемых деформаций.
Наличие четырех продольных разрезов в полом цилиндре нагрузочного элемента обеспечивает закрепление фотоупругого элемента в пластине в заведомо нагруженном состоянии за счет того, что внешний диаметр фотоупругого элемента превышает внутренний диаметр посадочного места внутри полого цилиндра на величину, достаточную для жесткого крепления за счет упругости стенок цилиндра. При монтаже фотоупругого элемента внутри нагрузочного элемента стенки цилиндра упруго раздвигаются благодаря четырем разрезам в цилиндре и упругости материала цилиндра. После монтажа фотоупругий элемент зажат стенками цилиндра, что обеспечивает работу тензометрического датчика как на сжатие, так и на растяжение. Четыре продольных разреза в полом цилиндре нагрузочного элемента обеспечивают также действие исходной силовой нагрузки на фотоупругий элемент в двух взаимно перпендикулярных направлениях. Это, в свою очередь, обеспечивает неизменность распределения напряжений в фотоупругом элементе при деформациях, связанных с изменением температуры, как самого цилиндра, так и контролируемого объекта, что, в свою очередь, обеспечивает температурную независимость сигнала.
Фотоупругий элемент может иметь форму цилиндра или усеченного конуса.
Наибольшая эффективность передачи деформации на фотоупругий элемент достигается в конструкции, обеспечивающей расположение фотоупругого элемента на уровне поверхности контролируемого объекта.
Для повышения надежности крепления фотоупругого элемента и повышения чувствительности преобразователя посадочное место фотоупругого элемента может быть образовано выступами на внутренней поверхности цилиндра, которые в случае выполнения фотоупругого элемента в виде усеченного конуса образуют конусовидное отверстие, ось которого совпадает с осью цилиндра, причем углы конуса отверстия и конуса фотоупругого элемента совпадают и равны конусу Морзе, а средний диаметр фотоупругого элемента превышает средний диаметр отверстия на величину, достаточную для жесткого крепления за счет упругости стенок цилиндра.
Выступы на внутренней поверхности цилиндра обеспечивают концентрацию напряжений на фотоупругом элементе в двух взаимно перпендикулярных направлениях, что повышает чувствительность преобразователя.
Для большей концентрации напряжений на фотоупругом элементе выступы могут быть выполнены в виде ребер с уменьшенной площадью контакта с фотоупругим элементом.
В качестве материала фотоупругого элемента может быть использован, например, плавленый кварц, обладающий высоким порогом разрушения на сжатие, что обеспечивает высокий динамический диапазон измерений деформаций и надежность преобразователя.
Нагрузочный элемент с пьезооптическим преобразователем закрепляется на контролируемом объекте таким образом, чтобы ось пьезооптического преобразователя была перпендикулярна плоскости измеряемых деформаций. Деформация контролируемого объекта передается стенкам цилиндра и через них - фотоупругому элементу пьезооптического преобразователя.
Нагрузочный элемент снабжен наружными выступами с монтажными отверстиями для крепления к контролируемому объекту. Для повышения надежности крепления нагрузочного элемента на наружных выступах могут быть выполнены зубья, лежащие в одной плоскости.
В некоторых случаях измерения напряжений, например в железобетонной балке, более удобным способом крепления нагрузочного элемента является его закрепление внутри монтажного отверстия, выполненного в контролируемом объекте, которое может быть как сквозным, так и глухим. В этом варианте конструкции датчика наружная поверхность полого цилиндра нагрузочного элемента выполнена в виде конуса Морзе. Монтажное отверстие в контролируемом объекте может иметь форму цилиндра или конуса Морзе, при этом средний диаметр монтажного отверстия должен быть равен среднему диаметру конуса Морзе нагрузочного элемента.
Обоснование введенных признаков
Так как фотоупругий элемент изначально сжат, то датчик с одинаковой чувствительностью работает как на сжатие, так и на растяжение. При этом фотоупругий элемент благодаря наличию разрезов в стенках цилиндра зажат в двух взаимно перпендикулярных направлениях, лежащих в плоскости, параллельной плоскости измеряемых деформаций. Деформация контролируемого объекта, возникающая вдоль любого из указанных направлений, приводит к анизотропному сжатию или растяжению фотоупругого элемента, что, в свою очередь, приводит к возникновению сигнала на выходе пьезооптического преобразователя, пропорционального величине деформаций. При изменении же температуры как цилиндра, так и контролируемого объекта, фотоупругий элемент сжимается или разжимается изотропно, что не приводит к повороту вектора поляризации исходно поляризованного светового луча при прохождении через фотоупругий элемент. Благодаря этому достигается температурная независимость показаний датчика.
За счет предлагаемого размещения и крепления фотоупругого элемента в полом цилиндре нагрузочного элемента, формы выполнения нагрузочного элемента (цилиндра) и способа его крепления на контролируемом объекте, исключения дополнительных термокомпенсационных устройств достигается упрощение конструкции, расширение функциональных возможностей (измерение деформаций в двух взаимно перпендикулярных направлениях) и повышение точности измерений деформации.
Таким образом, предлагаемая совокупность признаков, определяющая конструкцию тензометрического датчика, позволяет достичь заявленного технического результата:
расширения его функциональных возможностей, упрощения конструкции, повышения ее надежности и точности измерения деформаций в контролируемом объекте.
Описание датчика
Описание устройства поясняется фигурами 1, 2, 3, 4, 5, 6.
На фигуре 1 показана конструкция датчика с фотоупругим элементом, выполненным в виде цилиндра, где 1 - нагрузочный элемент (цилиндр), 2 - наружные выступы с монтажными отверстиями, 3 - фотоупругий элемент. В стенках цилиндра выполнены четыре разреза 4 вдоль оси цилиндра, не нарушающие целостности цилиндра. Благодаря разрезам фотоупругий элемент зажат в двух взаимно перпендикулярных направлениях Х и Y. Пьезооптический преобразователь расположен внутри цилиндра так, что его оптическая ось 5 совпадает с осью цилиндра. Для повышения надежности крепления нагрузочного элемента 1 к контролируемому объекту 6 на наружных выступах 2 выполнены зубья 7.
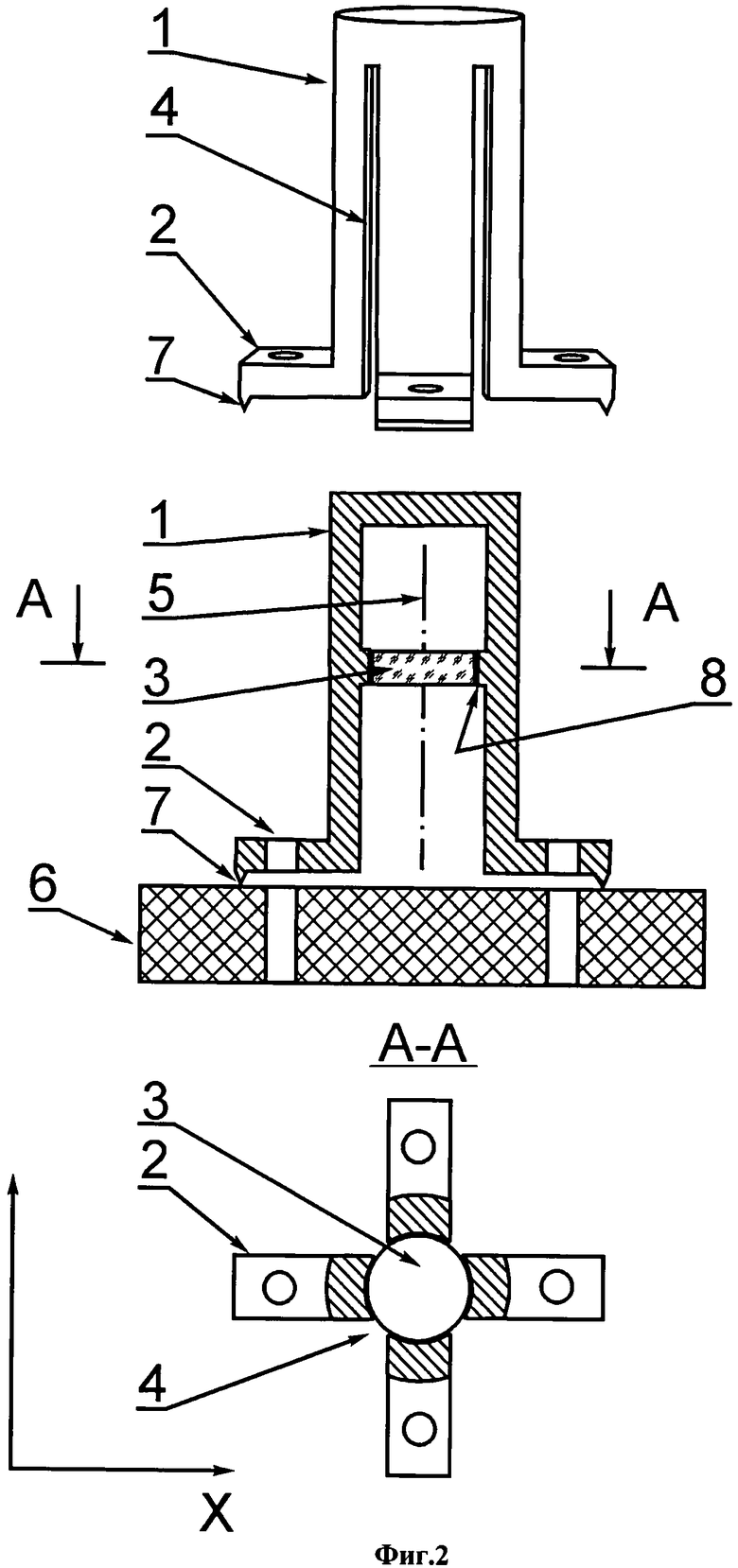
На фигуре 2 показана конструкция датчика, в котором фотоупругий элемент 3 имеет форму цилиндра, а на внутренних стенках цилиндра нагрузочного элемента выполнены выступы 8, также образующие цилиндрическую поверхность (посадочное место) для крепления фотоупругого элемента, при этом ось фотоупругого элемента и ось цилиндра посадочного места совпадают.
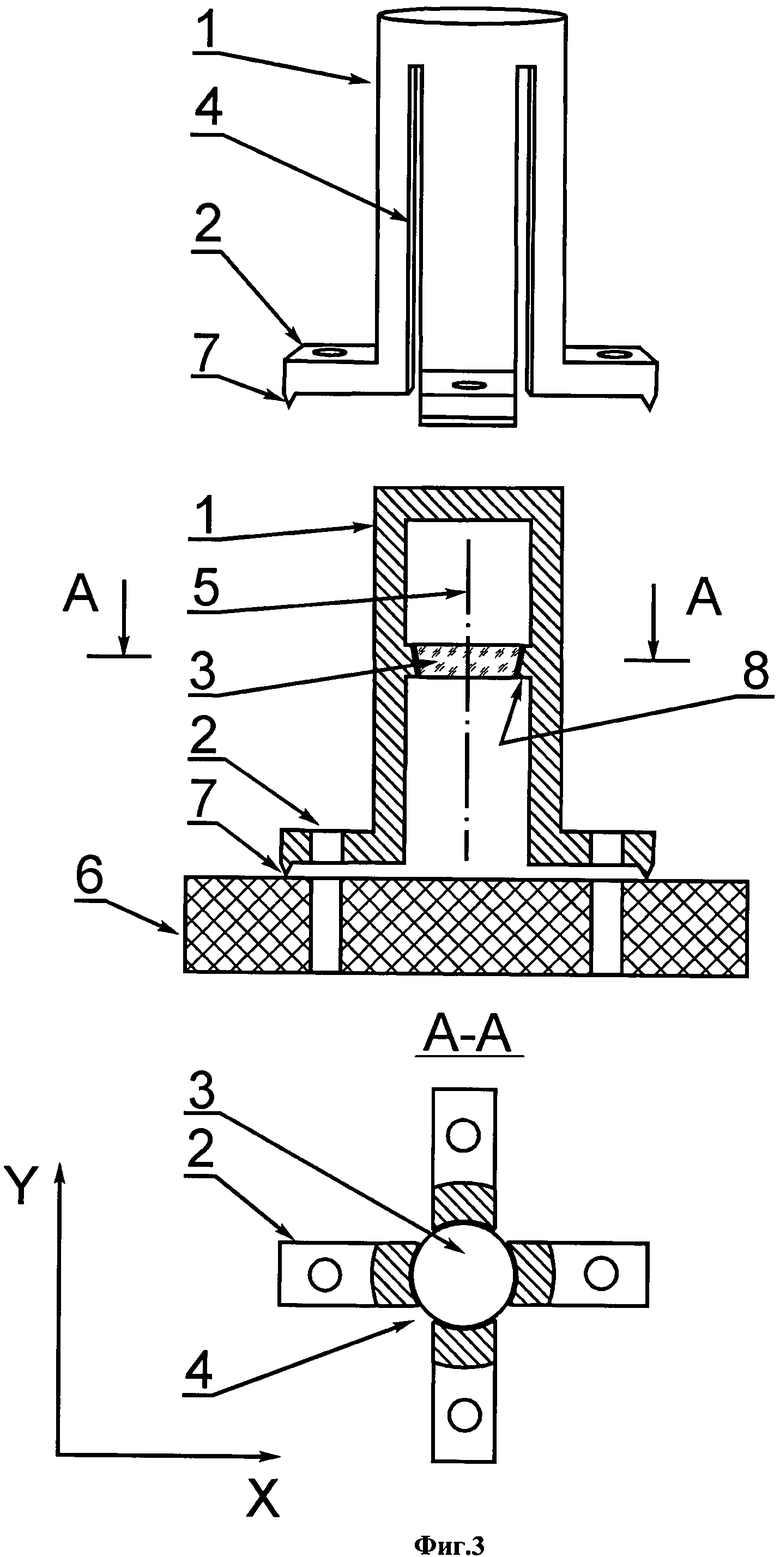
На фигуре 3 показана конструкция датчика с фотоупругим элементом 3, выполненным в виде конуса Морзе, выступы 8 на внутренней поверхности цилиндра нагрузочного элемента также образуют конус Морзе, при этом оптическая ось 5 фотоупругого элемента 3 совпадает с осью цилиндра.
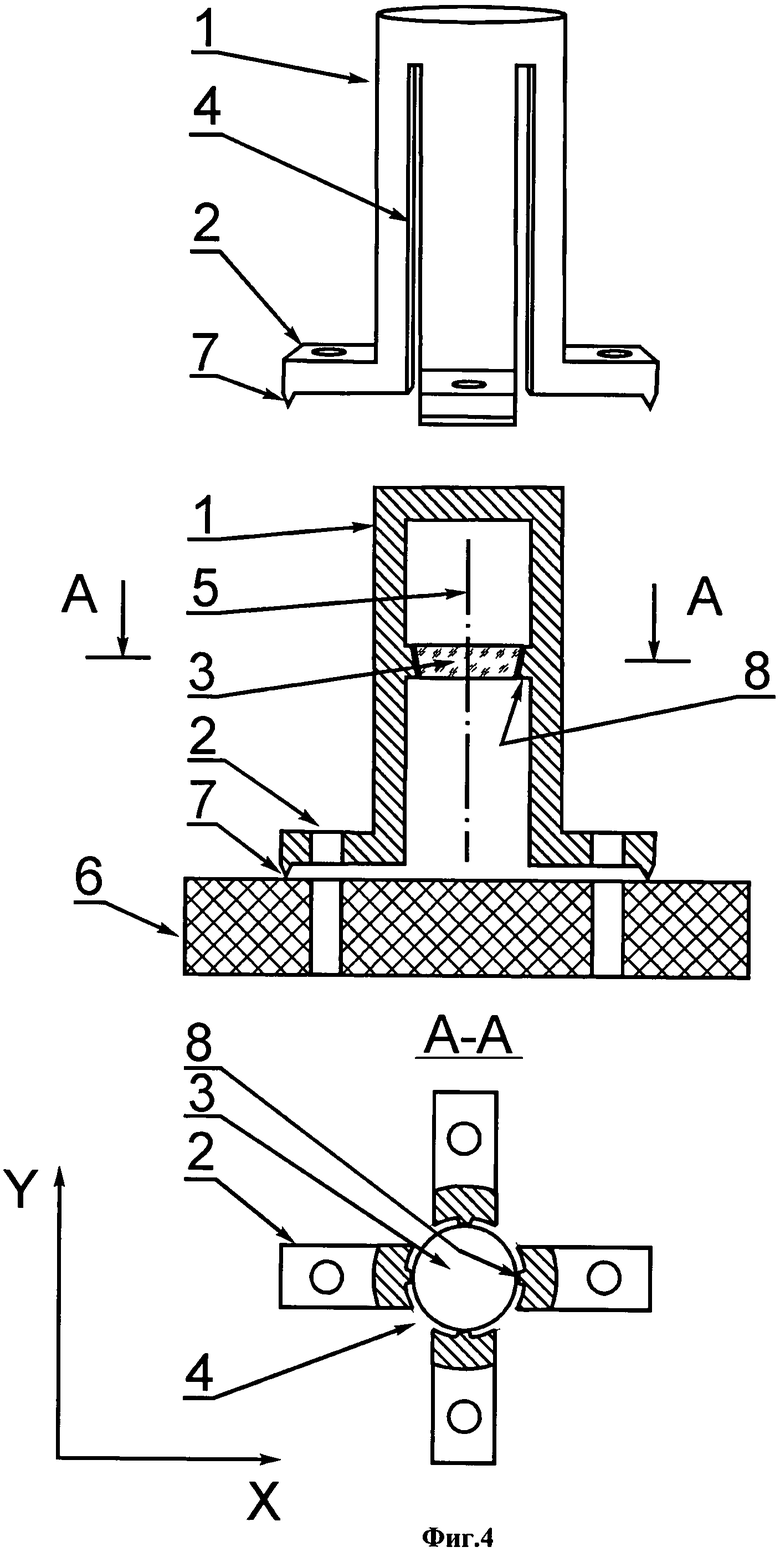
На фигуре 4 показана конструкция датчика с фотоупругим элементом 3, выполненным в виде конуса Морзе, на внутренней поверхности цилиндра нагрузочного элемента имеются ребра 8 с уменьшенной площадью контакта с фотоупругим элементом 3, образующие конус Морзе для крепления фотоупругого элемента 3.
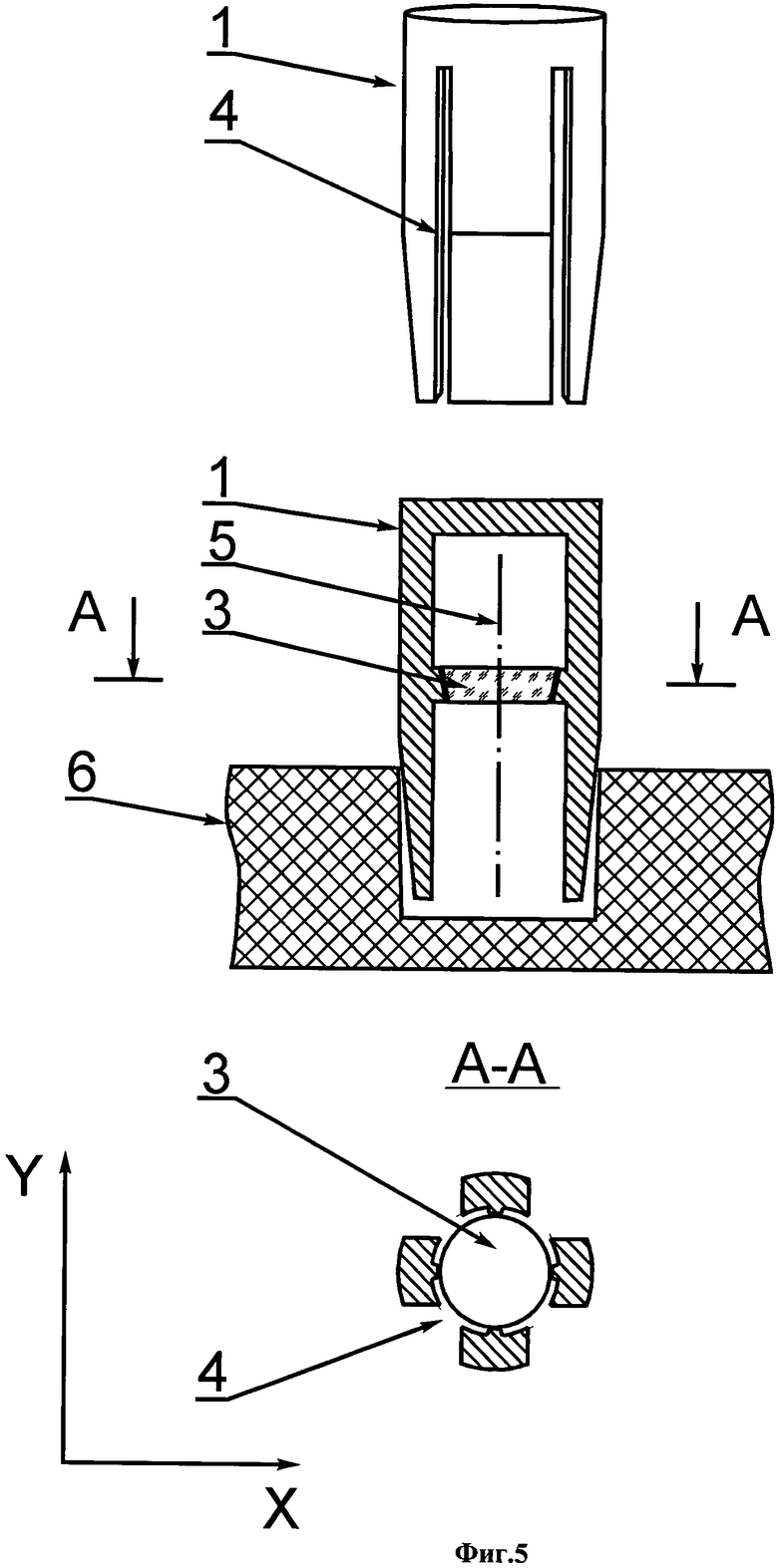
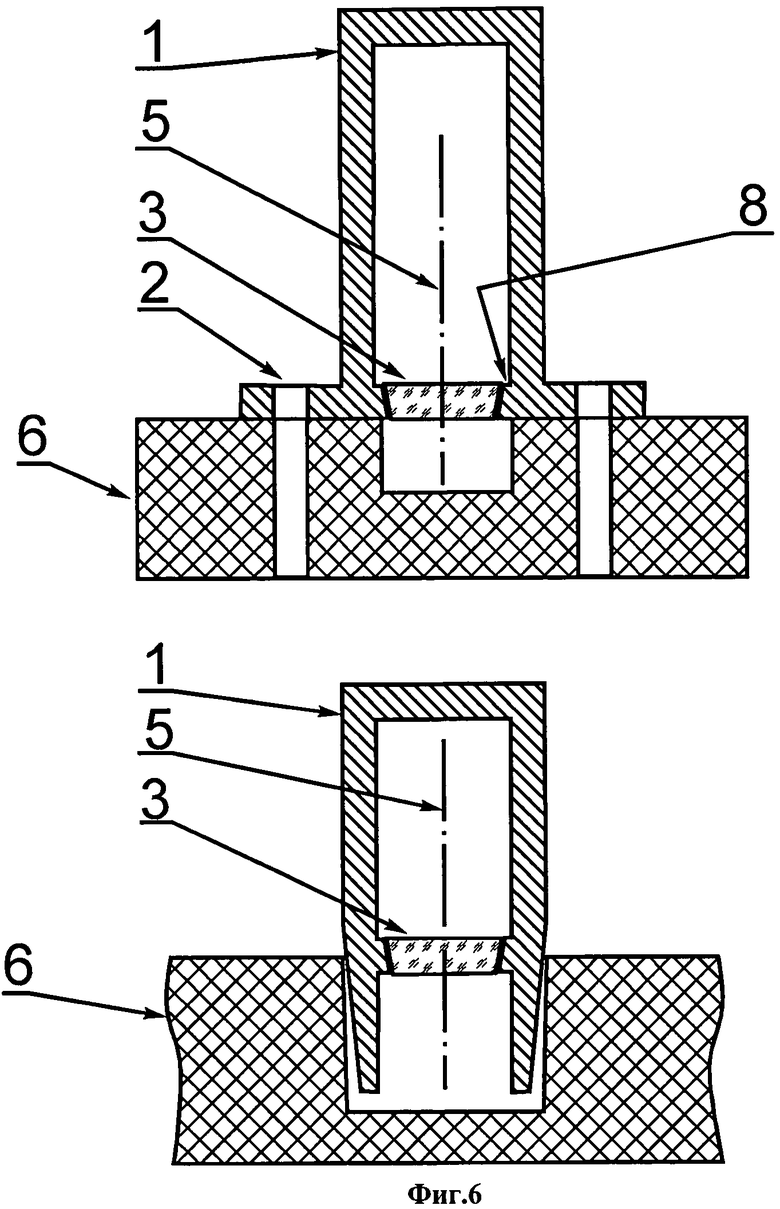
На фигуре 5 показан вариант конструкции датчика с нагрузочным элементом 1, у которого внешняя поверхность выполнена в виде конуса Морзе для крепления внутри монтажного отверстия, в контролируемом объекте 6.
На фигуре 6 показана конструкция датчика, в котором фотоупругий элемент 3 расположен на уровне поверхности контролируемого объекта 6.
Описание работы устройства
Тензометрический датчик работает следующим образом.
Нагрузочный элемент 1 закрепляют на поверхности исследуемого объекта 6 посредством наружных выступов 2 с монтажными отверстиями и зубьями 7 или посредством конуса Морзе внутри монтажного отверстия, выполненного в исследуемом объекте 6. Деформация растяжения или сжатия, возникающая в контролируемом объекте в направлении Х или Y, передается цилиндру 1 через места крепления. Деформация стенок цилиндра передается на фотоупругий элемент 3, что приводит к дополнительному сжатию (+δσх,у) или растяжению (-δσх,у) фотоупругого элемента, где δσх,у - изменение величины напряжения в фотоупругом элементе в направлении Х или Y.
В результате в пьезооптическом преобразователе возникает дополнительная разность фаз ±δΔ между взаимно перпендикулярными компонентами поляризации луча, прошедшего сквозь фотоупругий элемент, что приводит к изменению электрического сигнала на выходе фотоприемника пьезооптического преобразователя, который регистрируется, обрабатывается блоком обработки сигнала и выводится на индикаторную панель.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК | 2013 |
|
RU2530467C1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2564691C2 |
| ТЕНЗОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2422786C1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2013 |
|
RU2530466C1 |
| ФОТОУПРУГИЙ ЭЛЕМЕНТ | 2013 |
|
RU2552128C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА ПЬЕЗООПТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 2014 |
|
RU2565856C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2618862C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2110046C1 |
| Пьезооптический измеритель деформации объекта | 1988 |
|
SU1536196A1 |
| Пьезооптический измеритель деформаций | 1981 |
|
SU1136010A1 |
Изобретение относится к контрольно-измерительной технике, в частности, для измерения деформаций в различных конструкциях посредством поляризационно-оптических преобразователей и может быть использовано в строительстве, на транспорте, в промышленных производствах, в контрольно-измерительной аппаратуре. Технический результат - расширение функциональных возможностей, упрощение конструкции, повышение ее надежности и точности измерения деформаций. Тензометрический датчик включает нагрузочный элемент, закрепляемый на контролируемом объекте, пьезооптический преобразователь, преобразующий в электрический сигнал величину напряжений на фотоупругом элементе, который закреплен в заведомо нагруженном состоянии и таким образом, что действие исходной силовой нагрузки осуществляется в двух взаимно перпендикулярных направлениях, и блок обработки сигнала. Нагрузочный элемент представляет собой полый цилиндр с четырьмя продольными разрезами, не нарушающими целостности цилиндра. Фотоупругий элемент пьезооптического преобразователя закреплен в цилиндре таким образом, что оптическая ось пьезооптического преобразователя совпадает с осью цилиндра и перпендикулярна плоскости измеряемых напряжений. Наружная поверхность может быть выполнена в виде конуса Морзе. 2 н. и 12 з.п. ф-лы, 6 ил.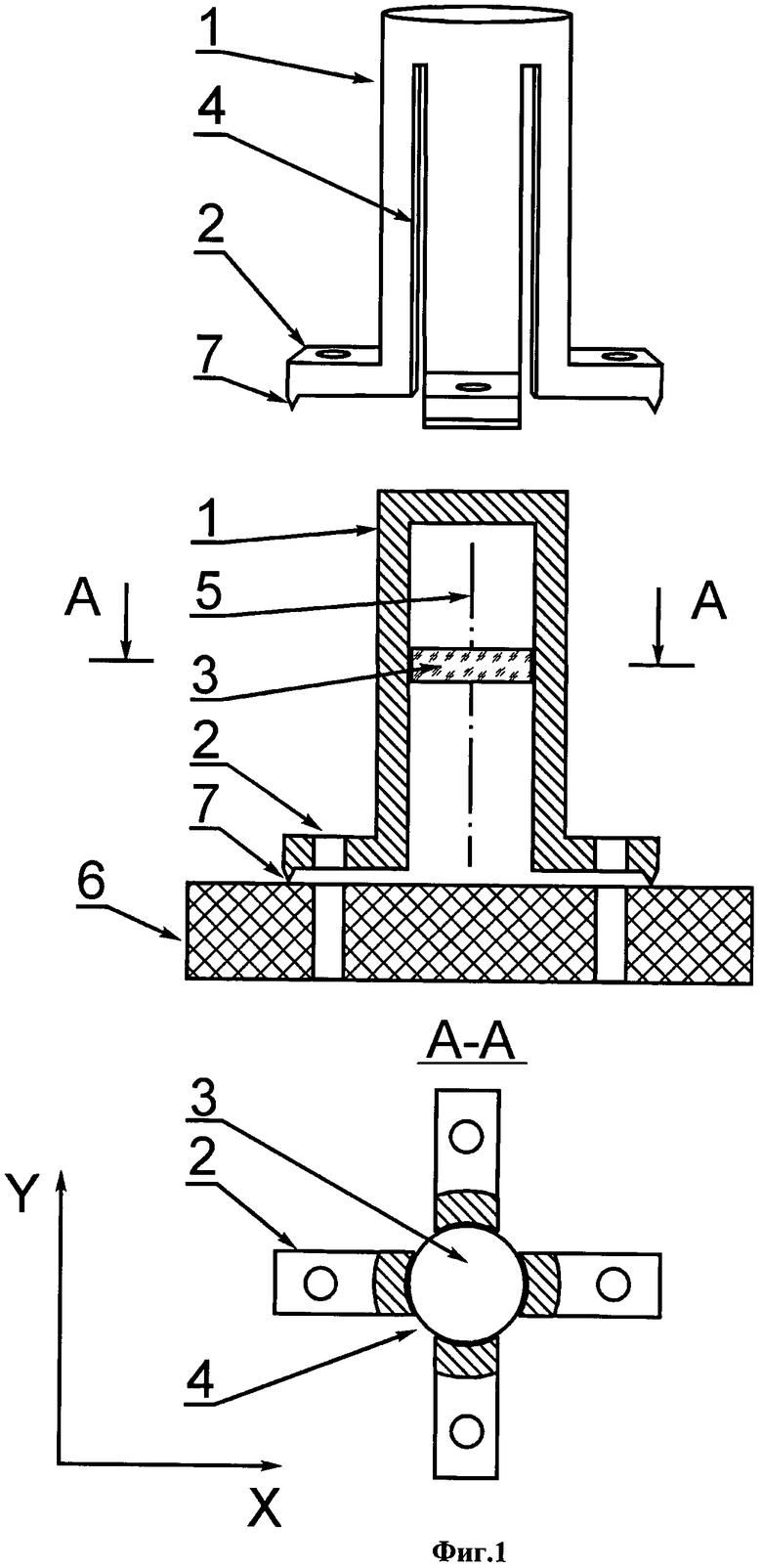
1. Тензометрический датчик, включающий нагрузочный элемент, закрепляемый на контролируемом объекте, пьезооптический преобразователь, преобразующий в электрический сигнал величину напряжений на фотоупругом элементе, который закреплен в заведомо нагруженном состоянии и таким образом, что действие исходной силовой нагрузки осуществляется в двух взаимно перпендикулярных направлениях, и блок обработки сигнала, отличающийся тем, что нагрузочный элемент представляет собой полый цилиндр с четырьмя продольными разрезами, не нарушающими целостности цилиндра, а фотоупругий элемент пьезооптического преобразователя закреплен в цилиндре таким образом, что оптическая ось пьезооптического преобразователя совпадает с осью цилиндра и перпендикулярна плоскости измеряемых напряжений.
2. Датчик по п.1, отличающийся тем, что фотоупругий элемент, выполненный в форме цилиндра, имеет внешний диаметр, превышающий диаметр посадочного места внутри полого цилиндра нагрузочного элемента на величину достаточную для жесткого крепления фотоупругого элемента за счет упругости стенок цилиндра.
3. Датчик по п.2, отличающийся тем, что посадочное место фотоупругого элемента, выполненного в форме цилиндра, образовано выступами на стенках полого цилиндра нагрузочного элемента.
4. Датчик по п.1, отличающийся тем, что фотоупругий элемент выполнен в форме усеченного конуса, а на внутренней поверхности цилиндра нагрузочного элемента имеются выступы для крепления фотоупругого элемента, образующие конусовидное отверстие, ось которого совпадает с осью цилиндра и с осью фотоупругого элемента, при этом углы конуса отверстия и конуса фотоупругого элемента совпадают и равны конусу Морзе.
5. Датчик по п.3 или 4, отличающийся тем, что выступы могут быть выполнены в виде ребер с уменьшенной площадью контакта с фотоупругим элементом.
6. Датчик по п.1, отличающийся тем, что нагрузочный элемент снабжен наружными выступами с монтажными отверстиями для крепления к контролируемому объекту.
7. Датчик по п.6, отличающийся тем, что для повышения надежности крепления нагрузочного элемента на наружных выступах выполнены зубья.
8. Датчик по п.1, отличающийся тем, что место крепления фотоупругого элемента обеспечивает его размещение на уровне поверхности контролируемого объекта.
9. Тензометрический датчик, включающий нагрузочный элемент, закрепляемый на контролируемом объекте, пьезооптический преобразователь, преобразующий в электрический сигнал величину напряжений на фотоупругом элементе, который закреплен в заведомо нагруженном состоянии и таким образом, что действие исходной силовой нагрузки осуществляется в двух взаимно перпендикулярных направлениях, и блок обработки сигнала, отличающийся тем, что нагрузочный элемент представляет собой полый цилиндр с четырьмя продольными разрезами, не нарушающими целостности цилиндра, а фотоупругий элемент пьезооптического преобразователя закреплен в цилиндре таким образом, что оптическая ось пьезооптического преобразователя совпадает с осью цилиндра и перпендикулярна плоскости измеряемых напряжений, при этом наружная поверхность нагрузочного элемента, размещаемого внутри контролируемого объекта, выполнена в виде конуса Морзе.
10. Датчик по п.9, отличающийся тем, что фотоупругий элемент выполнен в форме цилиндра и имеет внешний диаметр, превышающий диаметр посадочного места внутри полого цилиндра нагрузочного элемента, на величину, достаточную для жесткого крепления фотоупругого элемента за счет упругости стенок цилиндра.
11. Датчик по п.10, отличающийся тем, что посадочное место фотоупругого элемента, выполненного в форме цилиндра, образовано выступами на стенках полого цилиндра нагрузочного элемента.
12. Датчик по п.9, отличающийся тем, что фотоупругий элемент выполнен в форме усеченного конуса, а на внутренней поверхности цилиндра нагрузочного элемента имеются выступы для крепления фотоупругого элемента, образующие конусовидное отверстие, ось которого совпадает с осью цилиндра, при этом углы конуса отверстия и конуса фотоупругого элемента совпадают и равны конусу Морзе.
13. Датчик по п.11 или 12, отличающийся тем, что выступы могут быть выполнены в виде ребер с уменьшенной площадью контакта с фотоупругим элементом.
14. Датчик по п.9, отличающийся тем, что место крепления фотоупругого элемента обеспечивает его размещение на уровне поверхности контролируемого объекта.
| Тензофотопреобразователь | 1978 |
|
SU847085A1 |
| Пьезооптический измеритель деформации объекта | 1988 |
|
SU1536196A1 |
| Пьезооптический измеритель деформаций | 1981 |
|
SU1136010A1 |
| US 4002934 А, 11.01.1977. | |||

