Область техники
Изобретение относится к контрольно-измерительной технике, в частности для измерения деформаций (напряжений) в различных конструкциях посредством поляризационно-оптических преобразователей, и может быть использовано в строительстве, на транспорте, в промышленных производствах, в контрольно-измерительной аппаратуре.
Уровень техники
Известно, что пьезооптические преобразователи, используемые для измерения деформаций (напряжений), обладают наибольшей чувствительностью по сравнению с другими, например с тензорезистивными, преобразователями (Слезингер И.И. Пьезооптические измерительные преобразователи. Измерительная техника, 1985, №11, с.45-48) [1].
Наиболее близким по технической сущности к предлагаемому тензометрическому датчику является пьезооптический тензометрический датчик (Патент РФ №2454642 от 29.03.2011) [2]. Датчик состоит из нагрузочного элемента, закрепляемого на контролируемом объекте, пьезооптического преобразователя, преобразующего величину напряжений на фотоупругом элементе (ФЭ) в электрический сигнал, и блока обработки сигнала. Нагрузочный элемент представляет собой полый цилиндр с четырьмя продольными разрезами, не нарушающими целостности цилиндра, а фотоупругий элемент пьезооптического преобразователя закреплен в цилиндре таким образом, что оптическая ось пьезооптического преобразователя совпадает с осью цилиндра и перпендикулярна плоскости измеряемых деформаций. Закрепление фотоупругого элемента в пластине в заведомо нагруженном состоянии осуществляется за счет того, что внешний диаметр фотоупругого элемента превышает внутренний диаметр посадочного места внутри полого цилиндра на величину, достаточную для жесткого крепления за счет упругости стенок цилиндра. Закрепление ФЭ в изначально нагруженном состоянии позволяет измерять как деформации сжатия, так и деформации растяжения. Действие исходной силовой нагрузки в двух взаимно перпендикулярных направлениях обеспечивает термокомпенсацию преобразователя, так как при изменении температуры пластины ФЭ сжимается одинаково в перпендикулярных направлениях, то есть изотропно, что не приводит к появлению ложного сигнала на выходе пьезооптического преобразователя.
Недостатками данного тензометрического преобразователя являются: а) закрепление ФЭ в пластине осуществляется с помощью конуса Морзе, что требует весьма высокой точности в изготовлении как фотоупругого элемента, так и конусного отверстия, совпадающего с размерами ФЭ, что сопряжено с технологическими трудностями; б) величина исходной силовой нагрузки на ФЭ обеспечивается конструкцией нагрузочного элемента и не может быть изменена в процессе сборки датчика, что может приводить к невоспроизводимости параметров датчика; в) нагрузочный элемент является одновременно и корпусом пьезооптического преобразователя, поэтому при изменении конструкции нагрузочного элемента нужно менять конструкцию всего датчика, включая пьезооптический преобразователь.
Раскрытие изобретения
Задача изобретения заключается в создании такой конструкции тензометрического преобразователя, в которой, во-первых, закрепление ФЭ осуществляется более простым, по сравнению с конусом Морзе, способом, во-вторых, создание изначальной силовой нагрузки на ФЭ в двух взаимно ортогональных направлениях осуществляется контролируемым способом, в-третьих, пьезооптический преобразователь имеет собственный унифицированный корпус и может быть использован с нагрузочными элементами разных конструкций, при этом габаритный размер пьезооптического преобразователя в плоскости измеряемых напряжений не превышает размер ФЭ.
Технический результат - упрощение конструкции, повышение ее надежности и точности измерения деформаций, уменьшение габаритов.
Поставленная задача решена за счет того, что в известном устройстве, включающем нагрузочный элемент цилиндрической формы с разрезами, не нарушающими целостности цилиндра, и закрепляемый на контролируемом объекте, размещенный в нем пьезооптический преобразователь, состоящий из закрепленного в заведомо нагруженном состоянии фотоупругого элемента (ФЭ) с системой преобразования величины напряжений на ФЭ в электрический сигнал и блока обработки сигнала, согласно изобретению фотоупругий элемент имеет в плане крестообразную форму, фронтальные поверхности которого, параллельные направлению измеряемых усилий, являются оптически плоскими, а боковые поверхности ФЭ имеют постоянный и/или переменный радиус кривизны, при этом пьезооптический преобразователь имеет собственный корпус, который представляет собой цилиндр диаметром меньше, чем внешний диаметр ФЭ, и в котором выполнены отверстия, сквозь которые торцы боковых поверхностей ФЭ выступают за внешние габариты цилиндра, а в нагрузочном элементе напротив этих выступов на уровне размещения ФЭ выполнены четыре сквозных резьбовых отверстия, расположенные в плоскости перпендикулярной оси цилиндра и под углом 90 градусов относительно друг друга, под винты, обеспечивающие изначальную силовую нагрузку на ФЭ, при этом система преобразования величины напряжений на ФЭ в электрический сигнал пьезооптического преобразователя включает механизмы вращения поляризатора и четвертьволновой пластины.
Вращение поляризатора и четвертьволновой пластины пьезооптического преобразователя, в частности, может осуществляться с помощью винтов по принципу червячной передачи, причем роль червяка выполняет винт, а роль червячного колеса выполняет корпус поляризатора или четвертьволновой пластины, снабженный соответствующей резьбой, при этом винты снабжены стопорным кольцом, фиксирующим винт в корпусе пьезооптического преобразователя.
Для обеспечения надежного однородного контакта между нагрузочным элементом и контролируемым объектом отверстие для крепления может быть специально обработано, для чего в него вставляют винт, имеющий конус, равный по величине конусу на нагрузочном элементе, и внешнюю резьбу, аналогичную резьбе на нагрузочном элементе, и зажимают гайкой с контролируемым усилием, обеспечивающим пластическую деформацию и уплотнение материала контролируемого объекта.
Крепление ФЭ в преобразователе для предотвращения скалывания торцов фотоупругого элемента при затяжке его винтами осуществляют используя охранное кольцо, способное к упругой деформации, при этом внутренний диаметр кольца меньше внешнего диаметра фотоупругого элемента на заданную величину, причем перед размещением ФЭ в кольце последнее зажимают в двух взаимно перпендикулярных направлениях, составляющих 45 градусов с осями монтируемого ФЭ, после размещения в кольце ФЭ затяжку отпускают.
Для получения более однородного контакта между винтом и ФЭ могут быть размещены шарики заданного диаметра, при этом в охранном кольце в соответствующих местах должны быть изготовлены лунки, задающие центр приложения силы к охранному кольцу и к ФЭ.
Описание тензометрического преобразователя
Конструкция заявляемого тензометрического преобразователя поясняется Фиг.1, 2, 3, 4, 5, 6, 7, 8, 9.
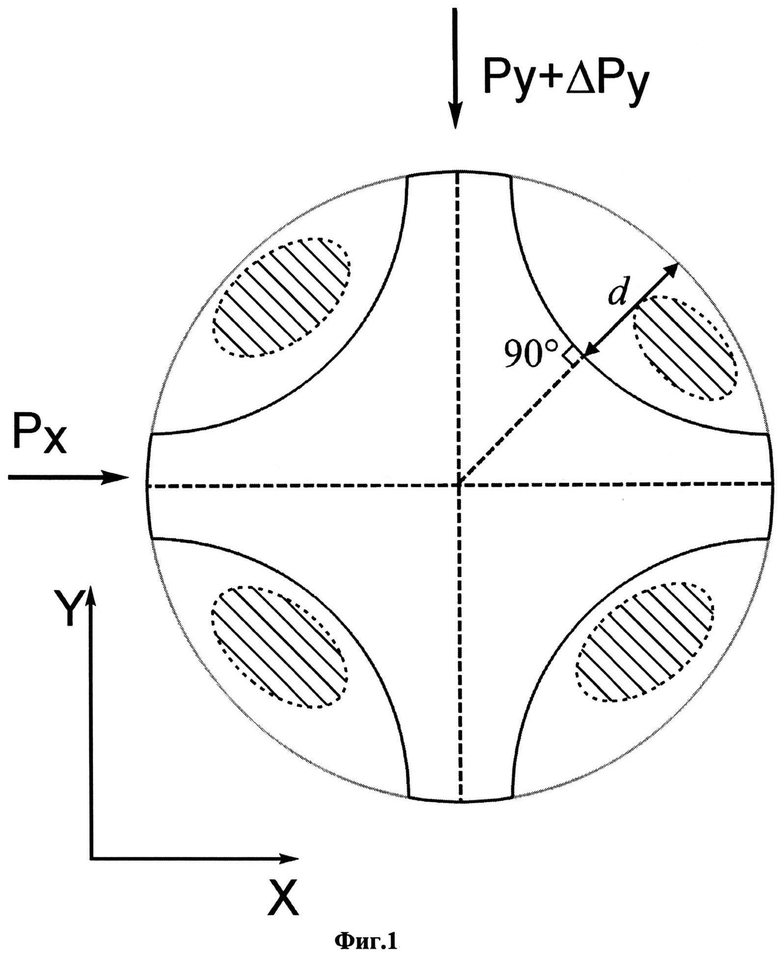
На Фиг.1 показан пример фотоупругого элемента (ФЭ), который в плане имеет крестообразную форму, боковые поверхности которого имеют постоянный радиус кривизны. Изначально ФЭ упруго сжат в направлении осей Х и Y усилиями Px=Py. Рабочее (измеряемое) усилие ΔPy прилагается вдоль оси Y. Данная конструкция ФЭ имеет два существенных преимущества. Во-первых, как показали расчеты, такая форма приводит к увеличению напряжения Δσ=σx-σy, в центральной части ФЭ по сравнению с круглым ФЭ при одинаковой внешней нагрузке. Увеличение напряжений происходит именно в той части ФЭ, где проходит световой пучок поляризованного света преобразователя. Например, для формы ФЭ, показанного на Фиг.1 (внешний диаметр ФЭ 12 мм, глубина «врезки» составляет d=2.55 мм, при этом радиус «врезки» равен 5 мм), увеличение Δσ по сравнению с круглым ФЭ составляет 32%. То есть, такая форма ФЭ приводит к увеличению эффективности преобразователя. Во-вторых, данная форма ФЭ позволяет разместить узлы крепления элементов пьезооптического преобразователя в промежутках между боковыми поверхностями ФЭ (заштрихованные области на Фиг.1), не выходя за габариты внешнего диаметра ФЭ. Таким образом, поперечный размер пьезооптического преобразователя не будет превышать диаметр ФЭ.
На Фиг.2 показан пример конструкции пьезооптического преобразователя с поперечными габаритами, не превышающими размер ФЭ. Несущей конструкцией является корпус преобразователя (поз.1) в виде капсулы, собранной из двух половинок. В капсуле размещается крестообразный ФЭ (поз.2) таким образом, что торцы ФЭ через соответствующие отверстия в капсуле (поз.3) выступают наружу на пределы внешнего диаметра капсулы (вид А-А). Для внешнего диаметра ФЭ, равного 12 мм, диаметр капсулы составляет 11.8 мм. Внутри капсулы в соответствующих посадочных местах размещаются светодиод (поз.4), поляризатор с механизмом вращения (поз.5), четвертьволновая пластина с механизмом вращения (поз.6), диафрагма с двумя анализаторами (поз.7), фотодиод с несколькими (не менее двух) фоточувствительными элементами (поз.8), блок электронной обработки сигнала (поз.9). Капсула содержит отверстие (поз.10) для вывода сигнального кабеля через герметичный разъем, крепежные винты (поз.11) и винты механизма вращения (поз.12).
Сборка пьезооптического преобразователя производится следующим образом. В одну из половинок капсулы в соответствующие посадочные места укладываются узлы пьезооптического преобразователя: светодиод, поляризатор, четвертьволновая пластина, фотоупругий элемент, диафрагма, анализаторы, фотодиод, блок электронной обработки сигнала. Соединительные провода светодиода укладываются в соответствующие канавки в капсуле. Сигнальный провод выводится через выходное отверстие. Затем накладывается вторая половинка капсулы и обе половинки стягиваются винтами (поз.11). С целью обеспечения герметичности капсулы зазоры между торцами фотоупругого элемента и соответствующими отверстиями в капсуле (поз.3) промазываются герметиком (например, однокомпонентным герметиком ВГО-1). Кроме того, герметик обеспечивает дополнительную фиксацию фотоупругого элемента. Наличие герметика не влияет на работу преобразователя, так как герметик остается достаточно мягким и находится в местах, не влияющих на распределение напряжений в фотоупругом элементе при приложении рабочих нагрузок. Вращение поляризатора и четвертьволновой пластины при настройке пьезооптического преобразователя осуществляется с помощью винтов (поз.12) по принципу червячной передачи, причем роль червяка выполняет винт, а роль червячного колеса выполняет корпус поляризатора или четвертьволновой пластины, снабженный соответствующей резьбой (Фиг.3). Винты снабжены стопорным кольцом, фиксирующим винт в капсуле.
В качестве материала капсулы может быть использован пластик (например, полистирол или капролон), так как его легче обрабатывать по сравнению с металлом. Такая конструкция может быть изготовлена из ABS или PLA пластика с помощью 3D принтера.
В качестве материала фотоупругого элемента может быть использован, например, плавленый кварц, обладающий высоким порогом разрушения на сжатие, что обеспечивает высокий динамический диапазон измерений деформаций и надежность преобразователя. Кроме того, технология обработки плавленого кварца хорошо развита, что удешевляет конструкцию тензометрического преобразователя.
В качестве материала поляризатора и анализаторов могут быть использованы поляризационные пленки Polaroid. В качестве материала четвертьволновой пластины может быть использована пленка слюды заданной толщины, обеспечивающей сдвиг фазы на 90 градусов между двумя взаимно перпендикулярными поляризациями светового луча.
Блок обработки сигнала может иметь как аналоговый выход, так и цифровой выход.
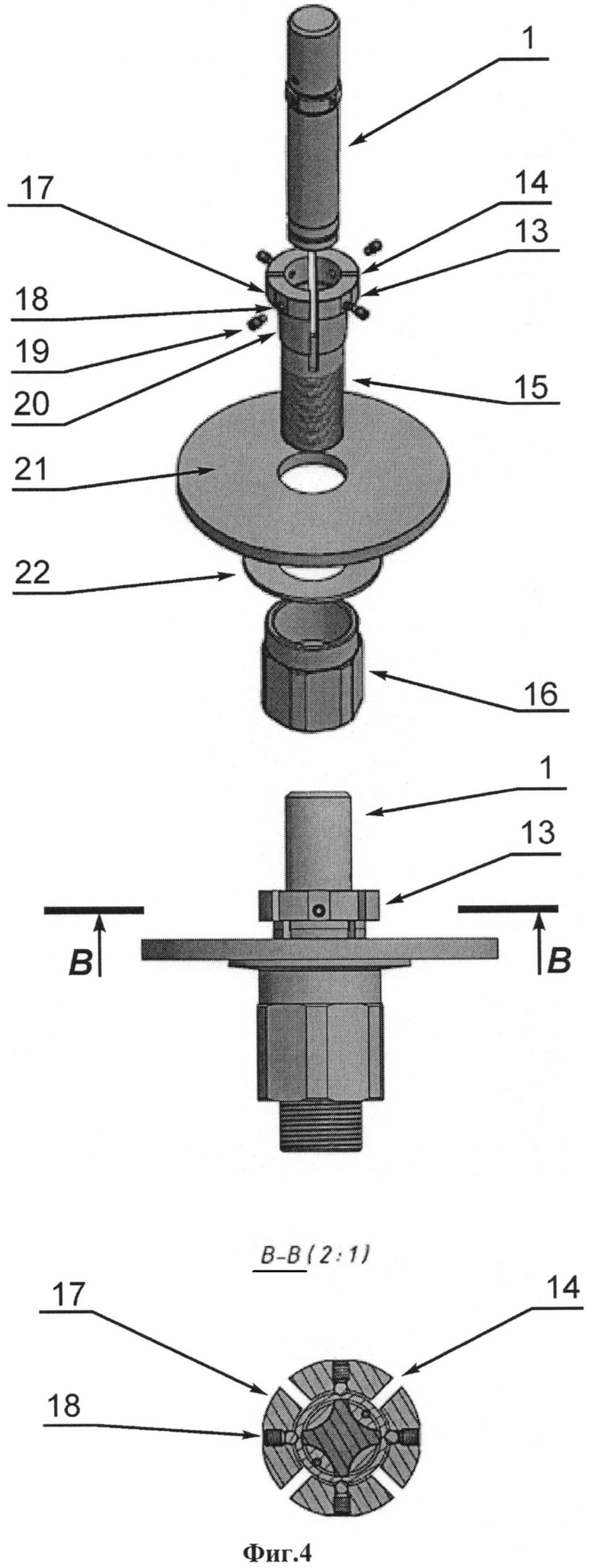
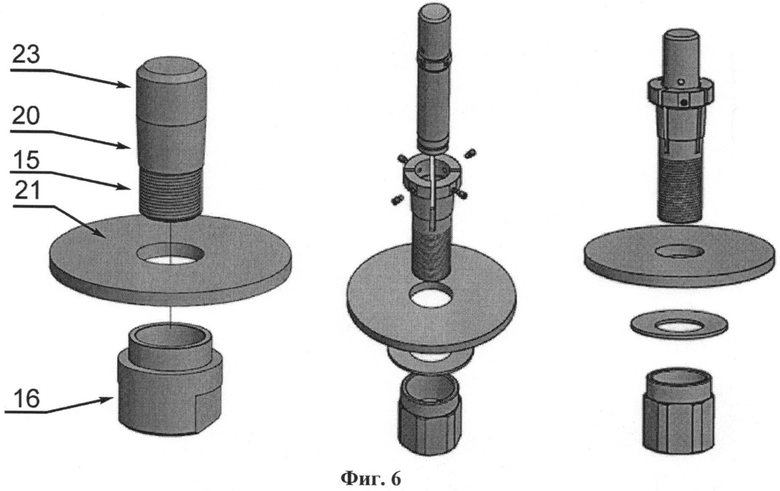
На Фиг.4 изображен заявляемый тензометрический преобразователь, который включает в себя описанный пьезооптический преобразователь (поз.1) и нагрузочный элемент (поз.13) для крепления тензометрического преобразователя на контролируемом объекте. Нагрузочный элемент представляет собой полый цилиндр (поз.13) с четырьмя симметрично расположенными разрезами (поз.14), не нарушающими целостности цилиндра. Неразрезанная часть цилиндра содержит внешнюю резьбу (поз.15) для наворачивания крепежной гайки (поз.16). Цилиндр имеет четыре внешних выступа (поз.17) со сквозными резьбовыми отверстиями (поз.18), расположенными в плоскости, перпендикулярной оси цилиндра, и под углом 90 градусов относительно друг друга. Начальная нагрузка на фотоупругом элементе обеспечивается винтами (поз.19), вкручиваемыми в данные отверстия и зажимающими фотоупругий элемент с фиксированным усилием. Винты изготавливаются из материала нагрузочного элемента. Внешняя поверхность цилиндра содержит конус (от 1 до 5 градусов) (поз.20), причем средний диаметр конуса равен диаметру монтажного отверстия в контролируемом объекте (поз.21). Для обеспечения скольжения при наворачивании гайки используется шайба (поз.22).
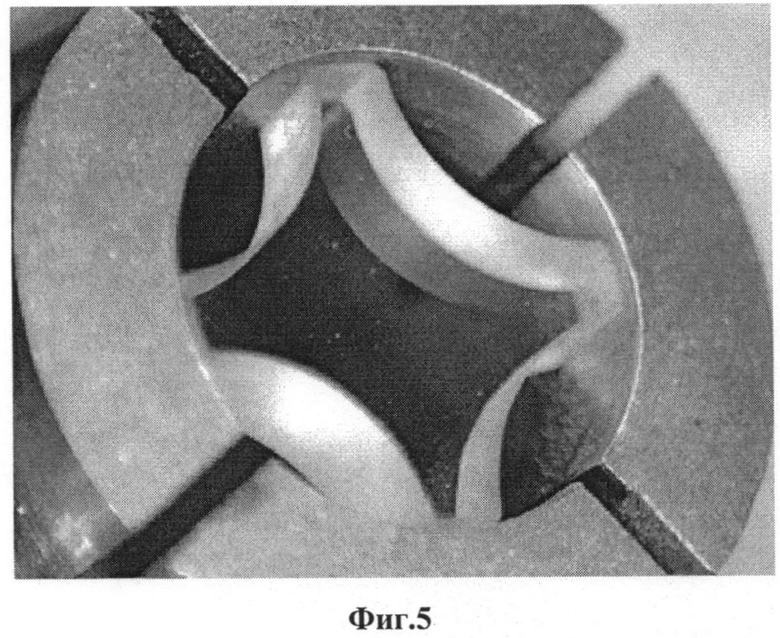
На Фиг.5 показан пример расположения крестообразного фотоупругого элемента в нагрузочном элементе (остальные элементы пьезооптического преобразователя отсутствуют).
Обоснование введенных признаков
Так как фотоупругий элемент в предлагаемой конструкции зажимается с помощью винтов, то нет необходимости изготавливать конус Морзе, что сопряжено с серьезными технологическими трудностями. Кроме того, степень сжатия фотоупругого элемента легко контролируется с помощью винтов и динамометрической отвертки, поэтому достаточно просто обеспечить одинаковую степень сжатия фотоупругого элемента в двух взаимно перпендикулярных направлениях. Таким образом достигается эффект упрощения конструкции и методики монтажа фотоупругого элемента, снижения требований на точность изготовления деталей.
Конструкция тензометрического преобразователя является симметричной в плоскости измеряемых напряжений, поэтому при изменении температуры, как преобразователя, так и контролируемого объекта, фотоупругий элемент сжимается или разжимается изотропно, что не приводит к повороту вектора поляризации исходно поляризованного светового луча при прохождении через фотоупругий элемент. Благодаря этому достигается температурная независимость показаний тензометрического преобразователя.
В предлагаемой конструкции пьезооптический преобразователь имеет собственный унифицированный корпус и может быть использован с нагрузочными элементами разных конструкций, при этом габаритный размер пьезооптического преобразователя в плоскости измеряемых напряжений не превышает размер ФЭ. Таким образом достигается эффект миниатюризации тензометрического преобразователя и повышения функциональной гибкости конструкции тензометрического преобразователя.
На Фиг.6 показано вспомогательное устройство (поз.23), применяемое при монтаже тензометрического преобразователя на контролируемом объекте.
Способ монтажа тензометрического преобразователя
Монтаж тензометрического преобразователя на контролируемом объекте производится следующим образом. В контролируемом объекте, например в конструкции, содержащей металлическую пластину, изготавливается отверстие диаметром, равным среднему диаметру конуса нагрузочного элемента. Преобразователь вставляется в приготовленное отверстие и закрепляется с противоположной стороны гайкой с фиксированным усилием. Для обеспечения скольжения при наворачивании гайки используется шайба (поз.22 на Фиг.4). Для обеспечения однородности контакта нагрузочного элемента с контролируемым объектом используется устройство, показанное на Фиг.6 (поз.23). Устройство представляет собой винт, содержащий конус, равный по величине конусу на нагрузочном элементе (поз.20), а также внешнюю резьбу, аналогичную резьбе на нагрузочном элементе (поз.15). Данное устройство вставляется в отверстие в контролируемом объекте, диаметр которого равен среднему диаметру конуса нагрузочного элемента, и зажимается гайкой (поз.16) с контролируемым усилием, обеспечивающим пластическую деформацию материала контролируемого объекта. В результате деформации стенок отверстия, во-первых, формируется конусное отверстие, совпадающее с конусом нагрузочного элемента, во-вторых, материал стенок отверстия уплотняется, что предотвращает его дальнейшую пластическую деформацию. В результате обеспечивается надежный однородный контакт между нагрузочным элементом и контролируемым объектом.
Материал винта должен иметь величину порога пластической деформации больше, чем материал контролируемого объекта, например закаленная сталь 65Г.
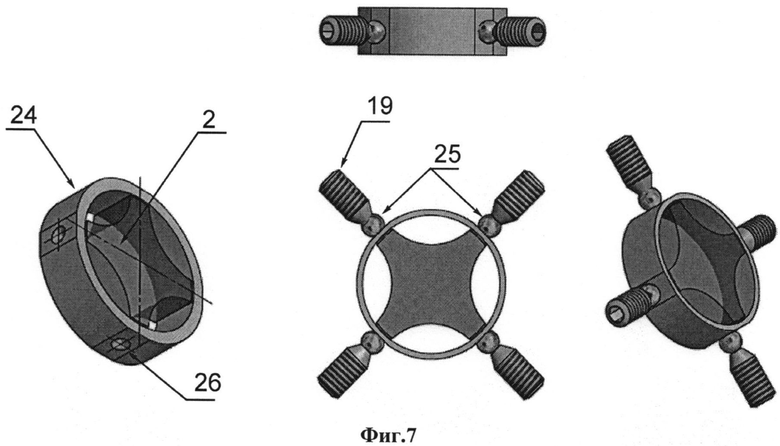
На Фиг.7 показано охранное кольцо (поз.24), используемое для предотвращения скалывания торцов фотоупругого элемента при затяжке его винтами. Внутренний диаметр кольца меньше внешнего диаметра фотоупругого элемента на заданную величину. При этом винты упираются не в ФЭ, а в металлическое кольцо, и усилие более равномерно распределяется по контактной площадке ФЭ. В качестве материала кольца может быть использован инвар 36Н, так как его температурный коэффициент расширения близок к коэффициенту температурного расширения кварца. В результате при изменении температуры ФЭ плотность контакта между ФЭ и кольцом будет оставаться неизменной.
Для получения еще более однородного контакта между винтом и ФЭ могут использоваться шарики заданного диаметра, которые вставляются между винтом и охранным кольцом (поз.25). При этом в охранном кольце в соответствующих местах изготавливаются лунки (поз.26), задающие центр приложения силы к охранному кольцу и к ФЭ.
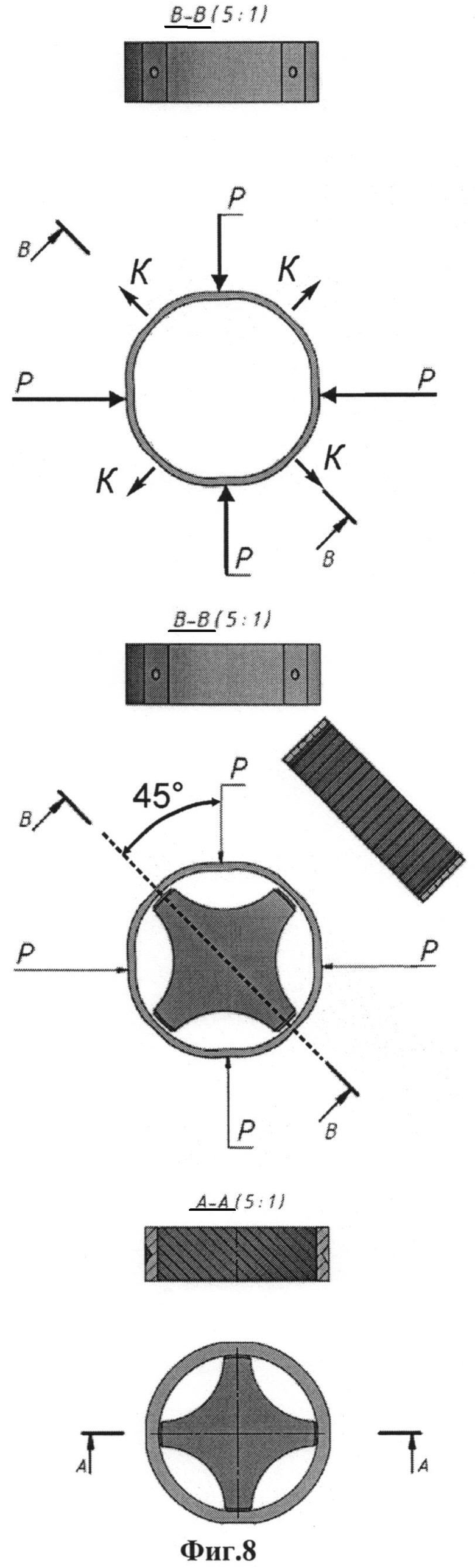
На Фиг.8 показан способ монтажа охранного кольца. Охранное кольцо зажимается в двух взаимно перпендикулярных направлениях, составляющих 45 градусов с осями монтируемого ФЭ, как показано стрелками Р. В результате охранное кольцо сжимается вдоль осей затяжки, при этом в направлении осей ФЭ охранное кольцо увеличивает свой диаметр (стрелки К). Затем внутрь кольца устанавливается ФЭ и затяжка отпускается. В результате охранное кольцо равномерно обжимает ФЭ, так как его внутренний диаметр меньше внешнего диаметра ФЭ на заданную величину. Для обеспечения надежного контакта торцы ФЭ, перед установкой в охранное кольцо, могут быть промазаны силикатным клеем с последующим термическим отжигом. В результате обеспечивается однородный контакт между ФЭ и охранным кольцом и равномерное распределение усилий по площади выступа ФЭ при затяжке его винтами.
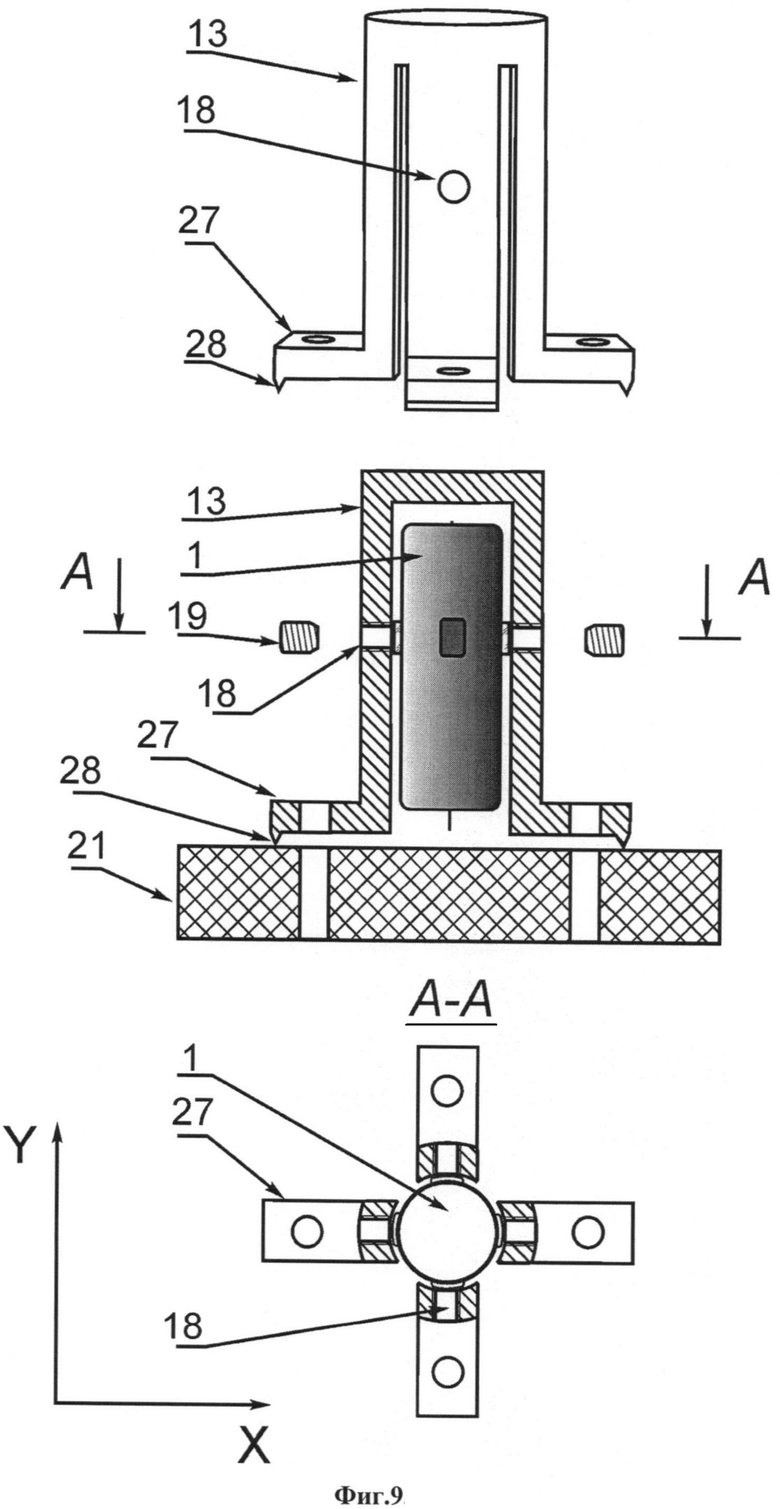
На Фиг.9 показана схема еще одного нагрузочного элемента. Нагрузочный элемент (поз.13) представляет собой полый цилиндр с четырьмя продольными разрезами, не нарушающими целостности цилиндра. В стенках цилиндра на уровне крепления фотоупругого элемента выполнены четыре сквозных резьбовых отверстия (поз.18), лежащие в плоскости, перпендикулярной оси цилиндра, и расположенные под углом 90 градусов относительно друг друга. Пьезооптический преобразователь в капсуле (поз.1) расположен внутри цилиндра так, что его оптическая ось совпадает с осью цилиндра. Фотоупругий элемент, расположенный в капсуле, зажимается винтами (поз.19), вкручиваемыми в отверстия (поз.18) с контролируемым усилием.
Нагрузочный элемент снабжен наружными выступами (поз.27) с монтажными отверстиями для крепления к контролируемому объекту. Для повышения надежности крепления нагрузочного элемента на наружных выступах могут быть выполнены зубья, лежащие в одной плоскости (поз.28).
Нагрузочный элемент с пьезооптическим преобразователем закрепляется на контролируемом объекте таким образом, чтобы ось пьезооптического преобразователя была перпендикулярна плоскости измеряемых деформаций. Деформация контролируемого объекта передается стенкам цилиндра и через них фотоупругому элементу пьезооптического преобразователя.
Описание работы устройства
Тензометрический преобразователь работает следующим образом. Тензометрический преобразователь закрепляют на контролируемом объекте с помощью нагрузочного элемента и гайки (поз.13, 16 на Фиг.4). Деформация растяжения или сжатия, возникающая в контролируемом объекте в направлении Х или Y (Фиг.1), передается на фотоупругий элемент через стенки нагрузочного элемента и винты, что приводит к дополнительному сжатию (+Δ) или растяжению (-Δ) фотоупругого элемента. В результате в пьезооптическом преобразователе возникает дополнительная разность фаз±Δ между взаимно перпендикулярными компонентами поляризации луча, прошедшего сквозь фотоупругий элемент, что приводит к изменению электрического сигнала на выходе фотоприемника пьезооптического преобразователя, который регистрируется и обрабатывается блоком обработки сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК (ВАРИАНТЫ) | 2011 |
|
RU2454642C1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК | 2013 |
|
RU2530467C1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2422786C1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2013 |
|
RU2530466C1 |
| ФОТОУПРУГИЙ ЭЛЕМЕНТ | 2013 |
|
RU2552128C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА ПЬЕЗООПТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 2014 |
|
RU2565856C1 |
| Пьезооптический измеритель деформации объекта | 1988 |
|
SU1536196A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2110046C1 |
| Пьезооптический измеритель деформаций | 1981 |
|
SU1136010A1 |
| ПЬЕЗООПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ МЕХАНИЧЕСКИХ ВЕЛИЧИН | 1996 |
|
RU2109258C1 |
Изобретение относится к контрольно-измерительной технике, в частности для измерения деформаций (напряжений) в различных конструкциях посредством поляризационно-оптических преобразователей, и может быть использовано в строительстве, на транспорте, в промышленных производствах, в контрольно-измерительной аппаратуре. Предложена конструкция тензометрического преобразователя, включающего нагрузочный элемент цилиндрической формы с разрезами, не нарушающими целостности цилиндра, и закрепляемый на контролируемом объекте, размещенный в нем пьезооптический преобразователь, состоящий из закрепленного в заведомо нагруженном состоянии фотоупругого элемента (ФЭ) с системой преобразования величины напряжений на ФЭ в электрический сигнал и блока обработки сигнала, причем фотоупругий элемент имеет в плане крестообразную форму, фронтальные поверхности которого, параллельные направлению измеряемых усилий, являются оптически плоскими, а боковые поверхности ФЭ имеют постоянный и/или переменный радиус кривизны, при этом пьезооптический преобразователь имеет собственный корпус, который представляет собой цилиндр диаметром меньше, чем внешний диаметр ФЭ, и в котором выполнены отверстия, сквозь которые торцы боковых поверхностей ФЭ выступают за внешние габариты цилиндра, а в нагрузочном элементе напротив этих выступов на уровне размещения ФЭ выполнены четыре сквозных резьбовых отверстия, расположенные в плоскости, перпендикулярной оси цилиндра, и под углом 90 градусов относительно друг друга, под винты, обеспечивающие изначальную силовую нагрузку на ФЭ, при этом система преобразования величины напряжений на ФЭ в электрический сигнал пьезооптического преобразователя включает механизмы вращения поляризатора и четвертьволновой пластины. Технический результат - упрощение конструкции, повышение ее надежности и точности измерения деформаций, уменьшение габаритов - достигается за счет того, что создание изначальной силовой нагрузки на ФЭ в двух взаимно ортогональных направлениях осуществляется контролируемым способом, пьезооптический преобразователь имеет собственный унифицированный корпус и может быть использован с нагрузочными элементами разных конструкций, при этом габаритный размер пьезооптического преобразователя в плоскости измеряемых напряжений не превышает размер ФЭ. 3 н. и 9 з.п. ф-лы, 8 ил.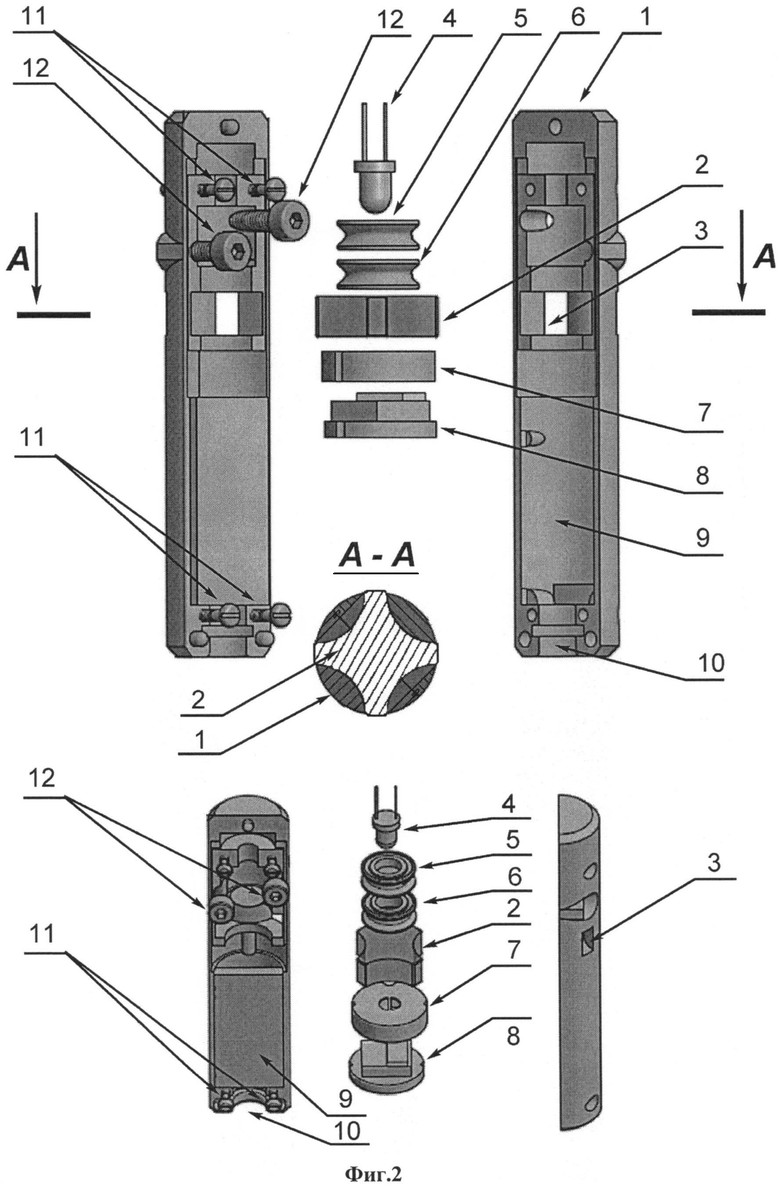
1. Тензометрический преобразователь, включающий нагрузочный элемент цилиндрической формы с разрезами, не нарушающими целостности цилиндра, и закрепляемый на контролируемом объекте, размещенный в нем пьезооптический преобразователь, состоящий из закрепленного в заведомо нагруженном состоянии фотоупругого элемента (ФЭ) с системой преобразования величины напряжений на ФЭ в электрический сигнал и блока обработки сигнала, отличающийся тем, что фотоупругий элемент имеет в плане крестообразную форму, фронтальные поверхности которого, параллельные направлению измеряемых усилий, являются оптически плоскими, а боковые поверхности ФЭ имеют постоянный и/или переменный радиус кривизны, при этом пьезооптический преобразователь имеет собственный корпус, который представляет собой цилиндр диаметром меньше, чем внешний диаметр ФЭ, и в котором выполнены отверстия, сквозь которые торцы боковых поверхностей ФЭ выступают за внешние габариты цилиндра, а в нагрузочном элементе напротив этих выступов на уровне размещения ФЭ выполнены четыре сквозных резьбовых отверстия, расположенные в плоскости, перпендикулярной оси цилиндра, и под углом 90 градусов относительно друг друга, под винты, обеспечивающие изначальную силовую нагрузку на ФЭ, при этом система преобразования величины напряжений на ФЭ в электрический сигнал пьезооптического преобразователя включает механизмы вращения поляризатора и четвертьволновой пластины.
2. Преобразователь по п. 1, отличающийся тем, что для обеспечения герметичности корпуса пьезооптического преобразователя зазоры между торцами фотоупругого элемента и стенками соответствующих отверстий в корпусе заполнены герметиком.
3. Преобразователь по п. 1, отличающийся тем, что вращение поляризатора и четвертьволновой пластины пьезооптического преобразователя осуществляется с помощью винтов по принципу червячной передачи, причем роль червяка выполняет винт, а роль червячного колеса выполняет корпус поляризатора или четвертьволновой пластины, снабженный соответствующей резьбой, при этом винты снабжены стопорным кольцом, фиксирующим винт в корпусе пьезооптического преобразователя.
4. Преобразователь по п. 1, отличающийся тем, что для крепления на исследуемом объекте внешняя поверхность цилиндра нагрузочного элемента в области контакта с контролируемым объектом выполнена в виде конуса (от 1 до 5 градусов), причем средний диаметр конуса равен диаметру монтажного отверстия в контролируемом объекте, а неразрезанная часть цилиндра нагрузочного элемента содержит внешнюю резьбу для наворачивания крепежной гайки.
5. Преобразователь по п. 1, отличающийся тем, что для крепления на исследуемом объекте цилиндр нагрузочного элемента в нижней части имеет выступы с монтажными отверстиями.
6. Преобразователь по п. 5, отличающийся тем, что для повышения надежности крепления нагрузочного элемента на наружных выступах выполнены зубья.
7. Способ обработки отверстия в контролируемом объекте для крепления в нем нагрузочного элемента тензометрического преобразователя по п. 1, отличающийся тем, что для обеспечения надежного однородного контакта между нагрузочным элементом и контролируемым объектом, в отверстие вставляют винт, имеющий конус, равный по величине конусу на нагрузочном элементе, и внешнюю резьбу, аналогичную резьбе на нагрузочном элементе, и зажимают гайкой с контролируемым усилием, обеспечивающим пластическую деформацию и уплотнение материала контролируемого объекта.
8. Способ крепления ФЭ в преобразователе по п. 1, отличающийся тем, что для предотвращения скалывания торцов фотоупругого элемента при затяжке его винтами крепление ФЭ осуществляют используя охранное кольцо, способное к упругой деформации, при этом внутренний диаметр кольца меньше внешнего диаметра фотоупругого элемента на заданную величину, причем перед размещением ФЭ в кольце последнее зажимают в двух взаимно перпендикулярных направлениях, составляющих 45 градусов с осями монтируемого ФЭ, после размещения в кольце ФЭ затяжку отпускают.
9. Способ по п. 8, отличающийся тем, что для получения более однородного контакта между винтом и ФЭ вставляют шарики заданного диаметра, при этом в охранном кольце в соответствующих местах изготавливают лунки, задающие центр приложения силы к охранному кольцу и к ФЭ.
10. Способ по п. 8, отличающийся тем, что для получения более однородного контакта между винтом и ФЭ торцы ФЭ перед установкой в охранное кольцо промазывают силикатным клеем с последующим термическим отжигом.
11. Способ по п. 8, отличающийся тем, что коэффициент температурного расширения материала охранного кольца совпадает с коэффициентом температурного расширения материала ФЭ.
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК (ВАРИАНТЫ) | 2011 |
|
RU2454642C1 |
| Тензофотопреобразователь | 1978 |
|
SU847085A1 |
| Пьезооптический измеритель деформации объекта | 1988 |
|
SU1536196A1 |
| US 4002934 A, 11.01.1977 | |||

