Область техники
Изобретение относится к контрольно-измерительной технике, в частности, для измерения деформаций (напряжений) в различных конструкциях посредством поляризационно-оптических преобразователей, и может быть использовано в строительстве, на транспорте, в промышленных производствах, в контрольно-измерительной аппаратуре.
Уровень техники
Известно, что пьезооптические преобразователи, используемые для измерения деформаций (напряжений), обладают наибольшей чувствительностью по сравнению с другими, например, с тензорезистивными преобразователями (Слезингер И.И. Пьезооптические измерительные преобразователи. Измерительная техника, 1985, №11, с.45-48) [1].
Наиболее близким по технической сущности к предлагаемому тензометрическому датчику является пьезооптический тензометрический преобразователь (Патент №2422786 от 23.04.2010) [2]. Преобразователь состоит из нагрузочного элемента, закрепляемого на контролируемом объекте, пьезооптического преобразователя, преобразующего величину напряжений на фотоупругом элементе в электрический сигнал, и блока обработки сигнала. Нагрузочный элемент представляет собой пластину, обеспечивающую концентрацию напряжений на фотоупругом элементе, фотоупругий элемент закреплен в пластине в заведомо нагруженном состоянии и таким образом, что действие исходной силовой нагрузки осуществляется в двух взаимно перпендикулярных направлениях. Закрепление фотоупругого элемента в изначально нагруженном состоянии позволяет измерять как деформации сжатия, так и деформации растяжения. Действие исходной силовой нагрузки в двух взаимно перпендикулярных направлениях обеспечивает термокомпенсацию преобразователя, так как при изменении температуры пластины фотоупругий элемент сжимается одинаково в перпендикулярных направлениях, то есть изотропно, что не приводит к появлению ложного сигнала на выходе пьезооптического преобразователя.
Недостатками данного тензометрического преобразователя являются: а) закрепление фотоупругого элемента в пластине осуществляется с помощью конуса Морзе, что требует весьма высокой точности в изготовлении как фотоупругого элемента, так и конусного отверстия в пластине, совпадающего с размерами фотоупругого элемента; б) пластина по конструкции не является симметричной в направлениях приложения исходной нагрузки на фотоупругий элемент, а значит, обладает разной жесткостью во взаимно перпендикулярных направлениях, что не может обеспечить изотропность сжатия фотоупругого элемента при изменении температуры, а значит, не может обеспечить достаточную термокомпенсацию тензометрического преобразователя.
Раскрытие изобретения
Задача изобретения заключается в создании такой конструкции тензометрического преобразователя, в которой, во-первых, закрепление фотоупругого элемента в изначально нагруженном состоянии осуществляется более простым, по сравнению с конусом Морзе, способом, а во-вторых, термокомпенсация обеспечивалась более надежным способом.
Технический результат - упрощение конструкции, повышение ее надежности и точности измерения деформаций.
Поставленная задача решена за счет того, что в известном устройстве, включающем нагрузочный элемент, закрепляемый на контролируемом объекте, пьезооптический преобразователь, преобразующий в электрический сигнал величину напряжений на фотоупругом элементе, который закреплен в заведомо нагруженном состоянии, и блок обработки сигнала, согласно изобретению, нагрузочный элемент представляет собой пластину с цилиндрическим отверстием в центре, в котором фотоупругий элемент цилиндрической формы регулируемо зажат в направлении действия измеряемых деформаций с помощью двух стержней, изготовленных из материала с коэффициентом температурного расширения, большим, чем соответствующий коэффициент пластины, при этом длина стержней рассчитана таким образом, что обеспечивает неизменность величины исходного сжатия от изменения температуры.
Материал стержней и их длина выбираются таким образом, чтобы с изменением температуры изменение суммарной длины стержней Lcm и ширины фотоупругого элемента Lфэ равнялось с достаточной точностью изменению расстояния между местами крепления стержней в нагрузочном элементе (пластине) Lпл. Другими словами, относительное удлинение пластины равняется относительному удлинению конструкции стержень-фотоупругий элемент-стержень. Если пластина изготовлена из материала с коэффициентом линейного расширения αпл, стрежни имеют коэффициент линейного расширения αст, а коэффициент линейного расширения фотоупругого элемента αфэ, то вышеизложенное условие можно записать следующим образом:


Учитывая, что Lпл=Lcm+Lфэ, получаем суммарную длину стержней:
Таким образом, при соблюдении условий согласно уравнению (3), при изменении температуры преобразователя на фотоупругом элементе не будут возникать дополнительные напряжения и, таким образом, достигается эффект независимости показаний преобразователя от температуры.
Для примера, рассмотрим пластину, изготовленную из стали ШХ15 с коэффициентом линейного температурного расширения αпл=11.9×10-6 K-1; фотоупругий элемент диаметром Lфэ=6 мм, изготовленный из плавленого кварца с αфэ=0.395×10-6 K-1; стержни, изготовленные из нержавеющей стали с αcm=16.6×10-6 K-1. Тогда, подставляя значения в формулу (3), получаем суммарную длину стержней Lcm=14.68 мм. Если стержни изготавливаются одинаковой длины, то длина одного стержня составляет Lcm/2=7.34 мм.
Начальная нагрузка на фотоупругом элементе обеспечивается, например, винтами, вкручиваемыми в пластину, и зажимающими стержни, между которыми расположен фотоупругий элемент. Винты изготавливаются из материала пластины.
В качестве материала фотоупругого элемента может быть использован, например, плавленый кварц, обладающий высоким порогом разрушения на сжатие, что обеспечивает высокий динамический диапазон измерений деформаций и надежность преобразователя. Кроме того, технология обработки плавленого кварца хорошо развита, что удешевляет конструкцию тензометрического преобразователя.
Нагрузочный элемент (пластина) с пьезооптическим преобразователем закрепляется на контролируемом объекте таким образом, чтобы ось стержней совпадала с направлением измеряемых деформаций контролируемого объекта. Деформация контролируемого объекта передается на пластину, затем на стержни и через них - на фотоупругий элемент пьезооптического преобразователя, оптическая ось которого лежит в плоскости, перпендикулярной направлению измеряемых деформаций.
Нагрузочный элемент снабжен монтажными отверстиями для крепления к контролируемому объекту. Для повышения надежности крепления нагрузочного элемента на его поверхности, контактирующей с контролируемым объектом, могут быть выполнены зубья, лежащие в одной плоскости.
Для повышения чувствительности тензометрического преобразователя к деформации, в пластине могут быть изготовлены пазы, не нарушающие ее целостности, которые уменьшают жесткость пластины в направлении измеряемых деформаций и не вносящие искажений в передачу деформации на фотоупругий элемент.
Для обеспечения надежного контакта стержней с фотоупругим элементом, на поверхности цилиндра могут быть выполнены симметрично расположенные плоские площадки (лыски), в которые упираются стержни.
Обоснование введенных признаков
Так как фотоупругий элемент зажат с помощью стержней, имеющих плоский торец, то нет необходимости изготавливать конус Морзе, что сопряжено с серьезными технологическими трудностями. Так как фотоупругий элемент изначально сжат, то тензометрический преобразователь с одинаковой чувствительностью работает как на сжатие, так и на растяжение. Длина стержней подбирается таким образом, чтобы выполнить условие формулы (3), при этом изменения размеров элементов нагрузочного элемента, связанные с изменением температуры, не приводят к дополнительным напряжениям на фотоупругом элементе, то есть достигается эффект термокомпенсации.
За счет крепления фотоупругого элемента с помощью стержней расчетной длины достигается упрощение конструкции и обеспечивается более надежная компенсация напряжений, связанных с изменением температуры тензометрического преобразователя.
Таким образом, предлагаемая совокупность признаков, определяющая конструкцию тензометрического преобразователя, позволяет достичь заявленного технического результата: упрощения конструкции, повышения ее надежности и точности измерения деформаций в контролируемом объекте.
Описание тензометрического преобразователя
Описание устройства поясняется фигурами 1, 2 и 3, где:
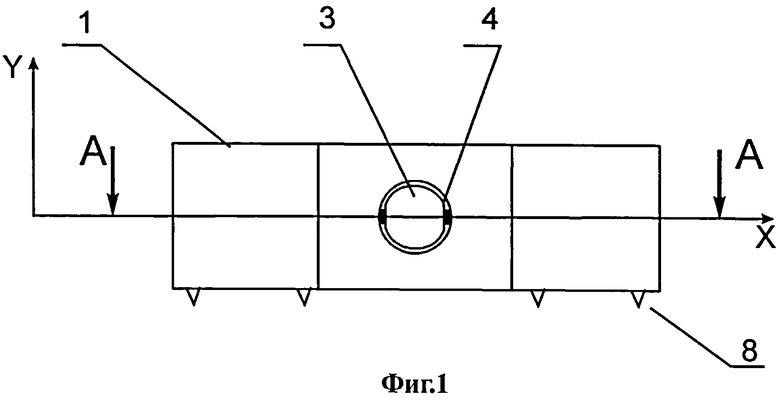
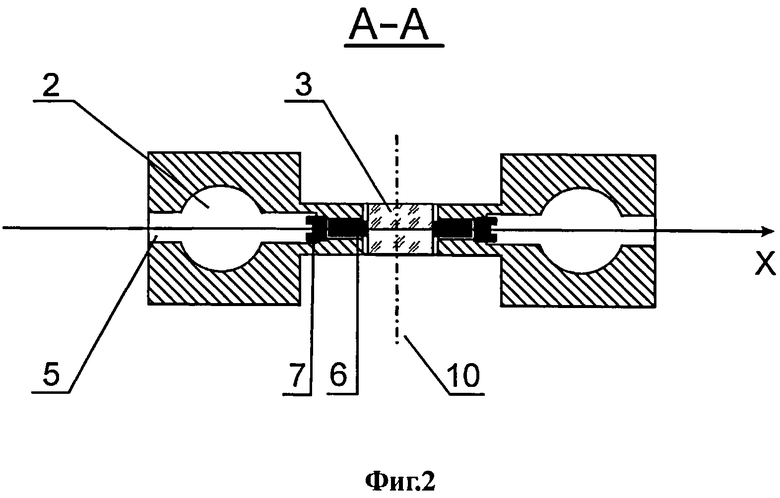
на фиг.1 показана конструкция тензометрического преобразователя с фотоупругим элементом, выполненным в виде цилиндра с двумя симметрично расположенными лысками;
на фиг.2 показан вид нагрузочного элемента (пластины) сверху (вид А-А на Фиг.1);
на фиг.3 показан общий вид нагрузочного элемента (пластины).
На фигурах цифрами показаны: 1 - нагрузочный элемент (пластина), 2 - монтажные отверстия, 3 - фотоупругий элемент, 4 - лыски. В пластине выполнены два отверстия 5, в которые вставляются стержни 6, которые зажимаются винтами 7. Для повышения надежности крепления нагрузочного элемента 1 к контролируемому объекту на поверхности пластины, обращенной к нагрузочному элементу, выполнены зубья 8. Для уменьшения жесткости нагрузочного элемента в направлении измеряемых деформаций, в пластине сделаны пазы 9. Оптическая ось пьезооптического преобразователя показана линией 10.
Описание работы устройства
Тензометрический преобразователь работает следующим образом.
Нагрузочный элемент 1 закрепляют на поверхности исследуемого объекта посредством монтажных отверстий 2 и зубьев 8 таким образом, чтобы ось пластины совпадала с осью нагружения X. Деформация растяжения или сжатия, возникающая в контролируемом объекте в направлении X, передается пластине 1 через места крепления 2. Деформация пластины передается на фотоупругий элемент 3 через стержни 6, что приводит к дополнительному сжатию (+Δ) или растяжению (-Δ) фотоупругого элемента. В результате в пьезооптическом преобразователе возникает дополнительная разность фаз ±Δ между взаимно перпендикулярными компонентами поляризации луча, прошедшего сквозь фотоупругий элемент, что приводит к изменению электрического сигнала на выходе фотоприемника пьезооптического преобразователя, который регистрируется и обрабатывается блоком обработки сигнала.
Использованные источники информации
1. Слезингер И.И. Пьезооптические измерительные преобразователи. Измерительная техника, 1985, №11, с.45-48.
3. Патент РФ №2422786 от 23.04.2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2422786C1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2014 |
|
RU2564691C2 |
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК (ВАРИАНТЫ) | 2011 |
|
RU2454642C1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК | 2013 |
|
RU2530467C1 |
| ФОТОУПРУГИЙ ЭЛЕМЕНТ | 2013 |
|
RU2552128C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛА ПЬЕЗООПТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ | 2014 |
|
RU2565856C1 |
| Пьезооптический измеритель деформаций | 1981 |
|
SU1136010A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2110046C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2618862C2 |
| Пьезооптический измеритель деформации объекта | 1988 |
|
SU1536196A1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано в строительстве, на транспорте, в промышленных производствах, в контрольно-измерительной аппаратуре. Предложен тензометрический преобразователь, включающий нагрузочный элемент, закрепляемый на контролируемом объекте, пьезооптический преобразователь, преобразующий в электрический сигнал величину напряжений на фотоупругом элементе, который закреплен в заведомо нагруженном состоянии, и блок обработки сигнала. Нагрузочный элемент представляет собой пластину с цилиндрическим отверстием, в котором фотоупругий элемент цилиндрической формы регулируемо зажат в направлении действия измеряемых деформаций с помощью двух стержней, изготовленных из материала с коэффициентом температурного расширения, большим, чем соответствующий коэффициент пластины. При этом длина стержней рассчитана таким образом, что обеспечивает неизменность величины исходного сжатия от изменения температуры. Технический результат - повышение точности измерений при одновременном упрощении конструкции устройства. 6 з.п. ф-лы, 3 ил.
1. Тензометрический преобразователь, включающий нагрузочный элемент, закрепляемый на контролируемом объекте, пьезооптический преобразователь, преобразующий в электрический сигнал величину напряжений на фотоупругом элементе, который закреплен в заведомо нагруженном состоянии, и блок обработки сигнала, отличающийся тем, что нагрузочный элемент представляет собой пластину с цилиндрическим отверстием, в котором фотоупругий элемент цилиндрической формы регулируемо зажат в направлении действия измеряемых деформаций с помощью двух стержней, изготовленных из материала с коэффициентом температурного расширения, большим, чем соответствующий коэффициент пластины, при этом длина стержней рассчитана таким образом, что обеспечивает неизменность величины исходного сжатия от изменения температуры.
2. Преобразователь по п.1, отличающийся тем, что для повышения эффективности передачи измеряемой деформации на фотоупругий элемент пластина имеет утоньшение в месте крепления фотоупругого элемента.
3. Преобразователь по п.1, отличающийся тем, что на фотоупругом элементе, выполненном в виде цилиндра, изготовлены две симметрично расположенные лыски, обращенные к зажимающим стержням.
4. Преобразователь по п.1, отличающийся тем, что в пластине изготовлены резьбовые отверстия для винтов, упирающихся в стержни, зажимающие фотоупругий элемент, причем винты изготовлены из одного с пластиной материала.
5. Преобразователь по п.1, отличающийся тем, что в пластине выполнены пазы, уменьшающие жесткость пластины в направлении измеряемых деформаций.
6. Преобразователь по п.1, отличающийся тем, что на поверхности пластины, контактирующей с контролируемым объектом, выполнены зубья, лежащие в одной плоскости.
7. Преобразователь по п.6, отличающийся тем, что для обеспечения контакта между пластиной и контролируемым объектом по всей плоскости пластины, обращенной к объекту, форма и размер зубьев подобраны таким образом, что при монтаже пластины на объекте зубья полностью погружаются в тело контролируемого объекта.
| ТЕНЗОМЕТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2422786C1 |
| US 4002934 A , 11.01.1977, | |||
| JP 0011201735 A , 30.07.1999, | |||
| Пьезооптический измеритель деформации объекта | 1988 |
|
SU1536196A1 |
| WO 2009128040 A 1, 22.10.2009 | |||

