Изобретение относится к тормозным устройствам в подвижных железнодорожных транспортных средствах.
Известен дисковый тормоз железнодорожного транспортного средства, содержащий шарнирно закрепленный на кронштейне рамы тележки тормозной цилиндр, шток которого связан с тормозными колодками через тяги и клещевые механизмы, а также тормозные диски, закрепленные на оси колесной пары и размещенные между тормозными накладками (авторское свидетельство СССР №644653, В61Н 5/00, В61Н 13/20, заявл. 07.09.1977 г. «Дисковый тормоз железнодорожного транспортного средства»). Известны также колодочные тормоза, которые содержат фрикционную пару, состоящую из колеса с продольным гребнем и соединенную с башмаком посредством чеки тормозной колодки (патент РФ №2293676, В61Н 1/00, заявл. 17.10.2005 г.). Наиболее близким прототипом является известный дисковый тормоз железнодорожного транспортного средства, содержащий связанные с опорами рамы тележки клещевые механизмы и тормозные диски, прикрепленные к колесам и размещенные между тормозными накладками (А.Липп, Д.Йон, Р.Манглер и др. Высокоскоростной поезд Velaro для России. // Железные дороги мира. 2009, №1, с.47; В.А.Гапанович, А.С.Назаров, А.Н.Яговкин и др. Технические особенности высокоскоростного поезда VELARO RUS. // Техника железных дорог. 2009, №1(5) февраль, с.47). Недостатки аналога и прототипа заключаются в высокой степени износа тормозных накладок и тормозного диска или же тормозных колодок и поверхности катания колеса или бандажа на колесе. Кроме того, значительные затраты расходуются на частое техническое обслуживание и неразрушающий контроль деталей трибопары дисковых тормозов, включающей тормозные накладки и тормозные диски. К настоящему времени соответствующими технологическими инструкциями предусмотрены различные методы неразрушающего контроля: визуальный, вихретоковый, магнитопорошковый и ультразвуковой, что определяет возрастающие расходы на техническое обслуживание. Целью предлагаемого изобретения является повышение надежности тормозов, снижение затрат на техническое обслуживание и неразрушающий контроль деталей тормозов. Для этого на колесе или колесном центре выполнены из магнитного материала полюса, ориентированные радиально в плоскости, перпендикулярной к оси вращения колесной пары. К тележке крепится электромагнит, между полюсами сердечника которого с минимальным рабочим воздушным зазором размещены полюса колеса или колесного центра. По окружности рядом с полюсами сердечника электромагнита размещены датчики положения полюсов колеса или колесного центра. Посредством коммутационного устройства работой электромагнита управляет управляющее устройство, подключенное своими входами к выходам датчиков положения полюсов колеса или колесного центра и выходу источника команды на торможение, а выходом ко входу коммутационного устройства, подключающего обмотку электромагнита к источнику электропитания.
Прилагаемые чертежи изображают:
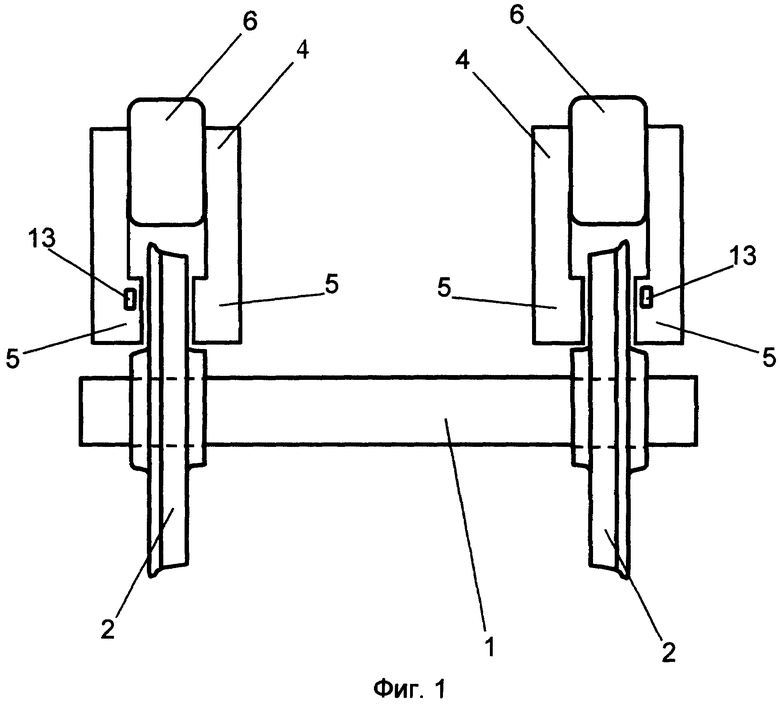
Фиг.1 - колесная пара с колесными электромеханическими тормозами;
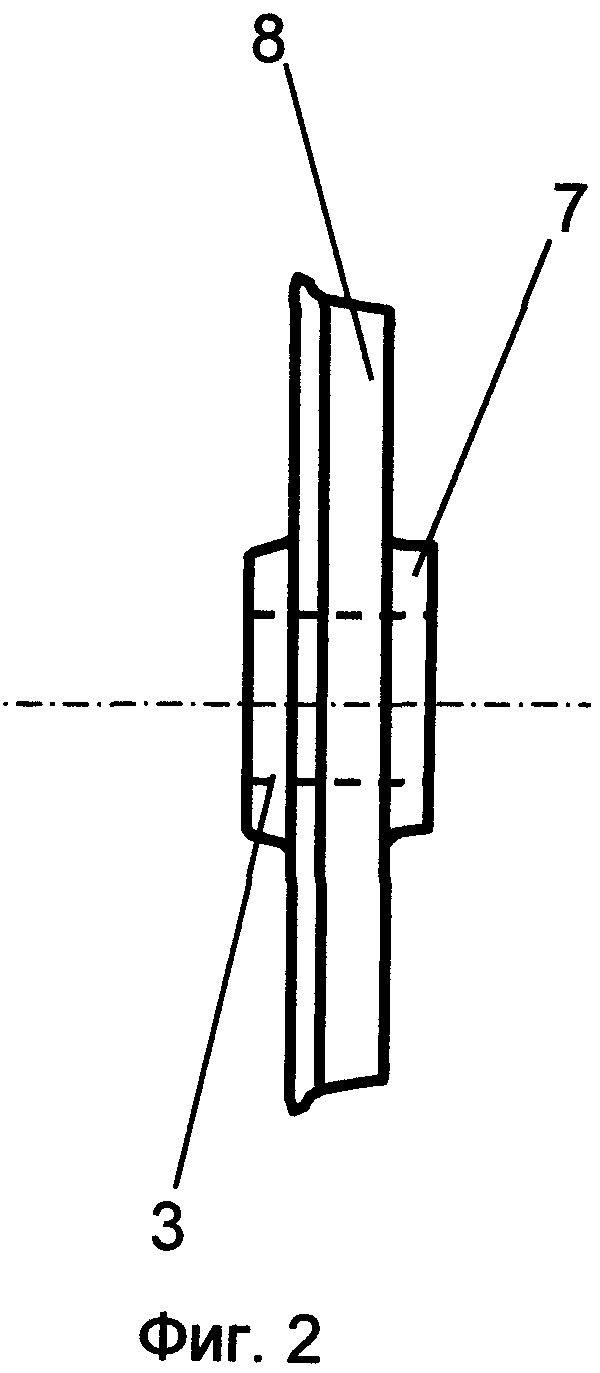
Фиг.2 - вид колеса спереди;
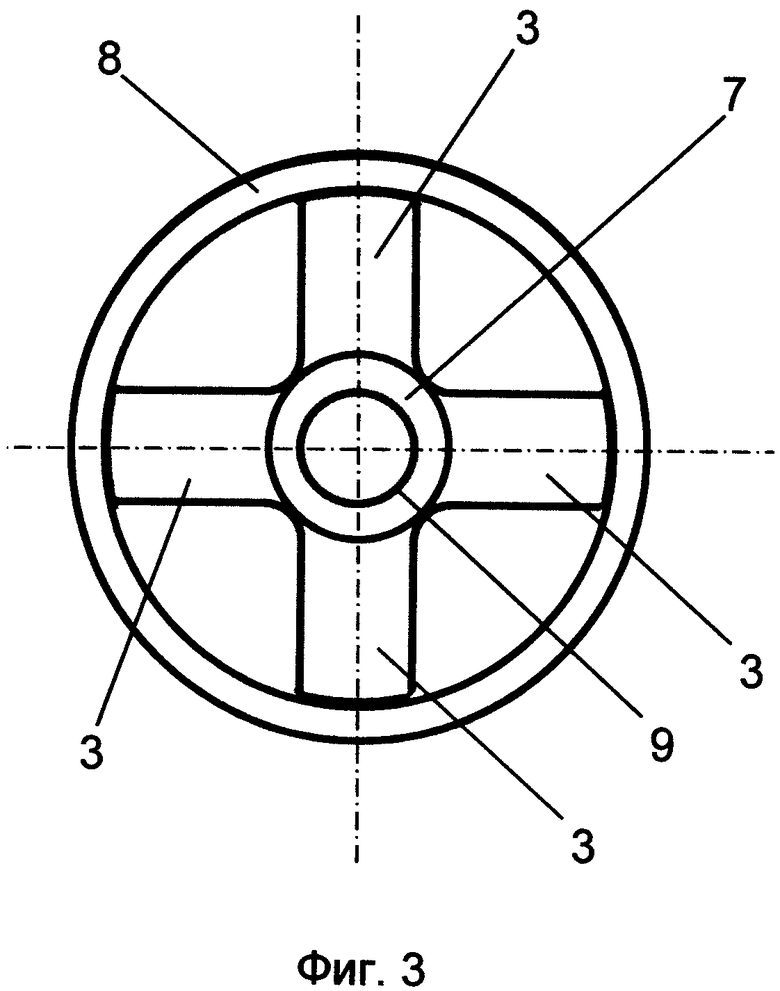
Фиг.3 - вид колеса сбоку;
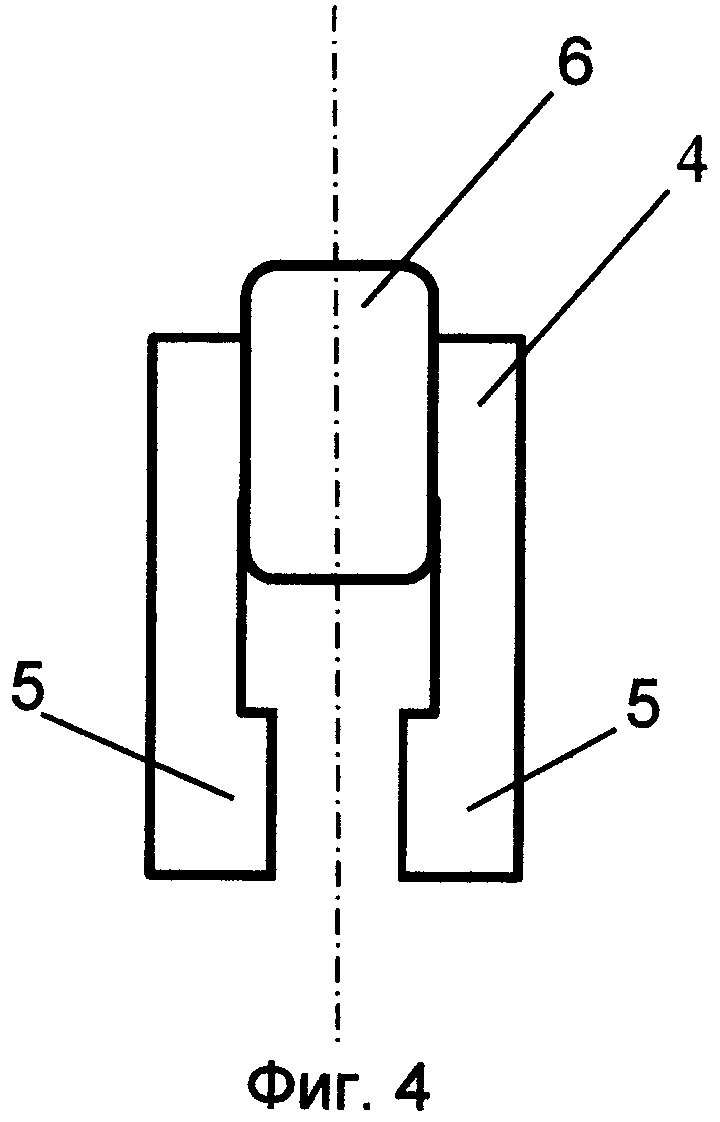
Фиг.4 - вид электромагнита спереди;
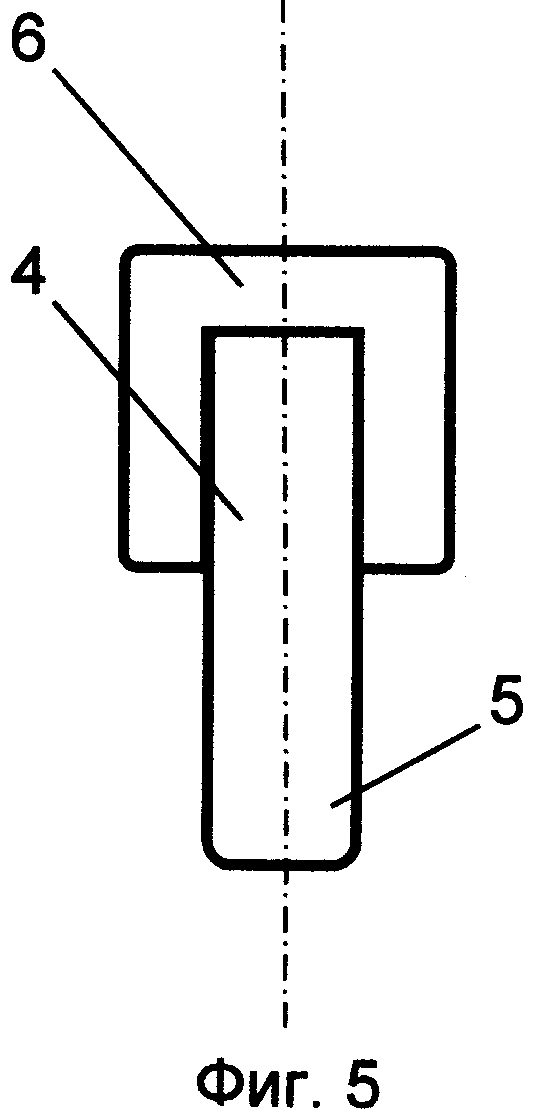
Фиг.5 - вид электромагнита сбоку;
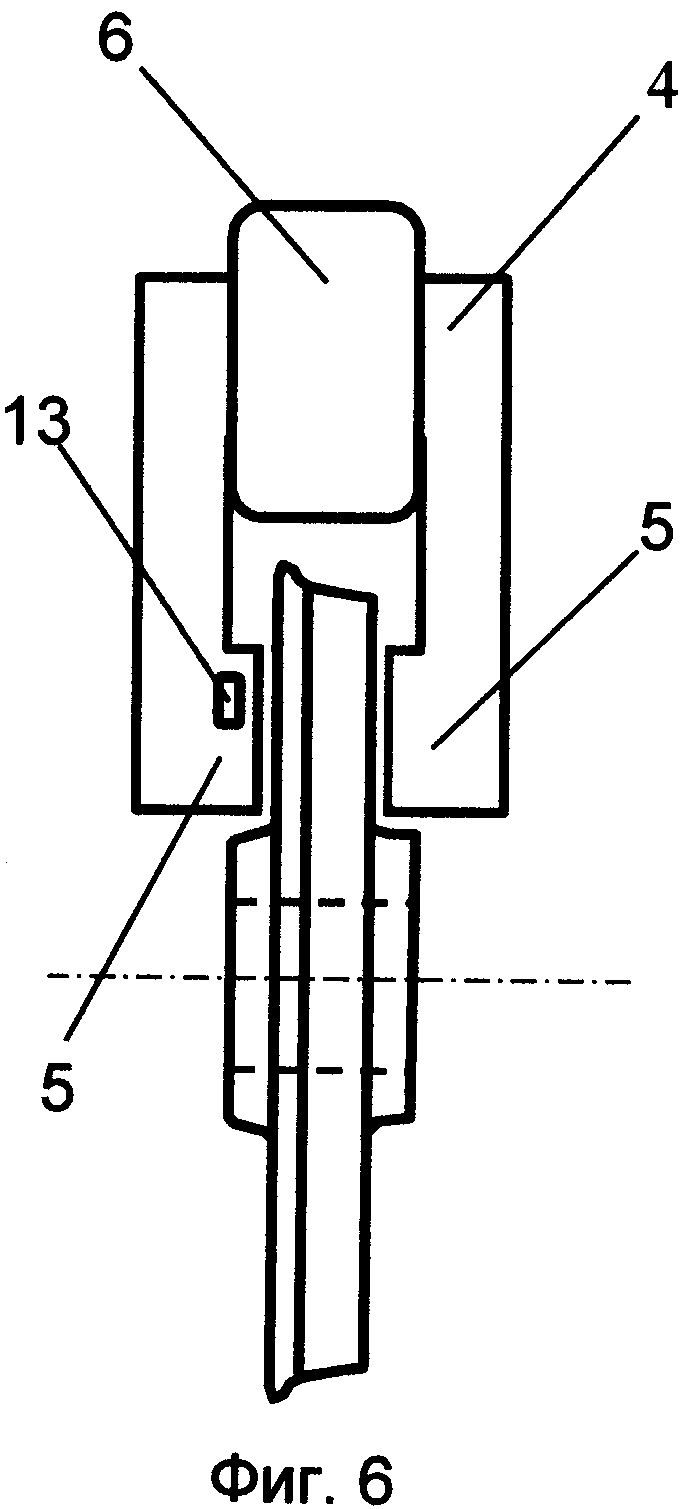
Фиг.6 - вид колесного электромеханического тормоза спереди;
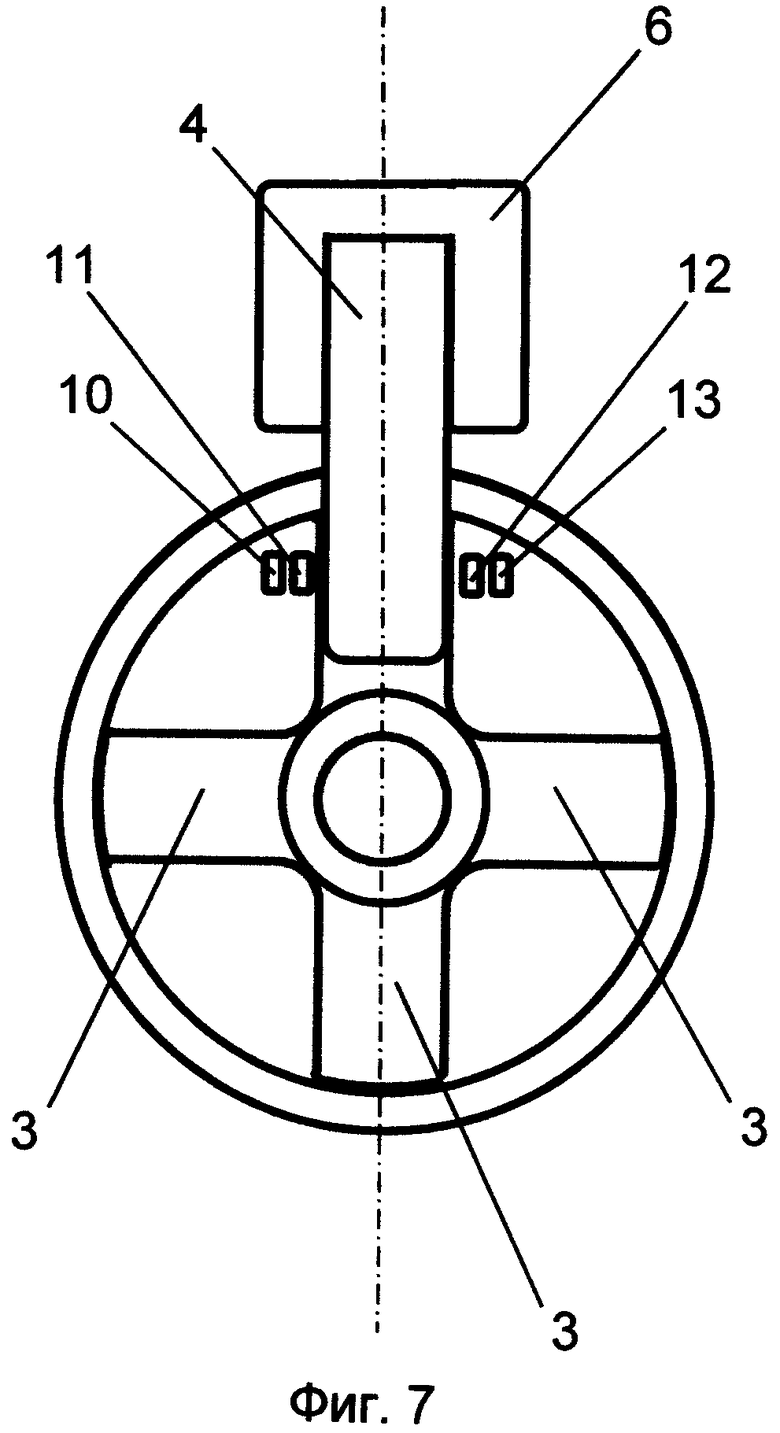
Фиг.7 - вид осевого электромеханического тормоза сбоку;
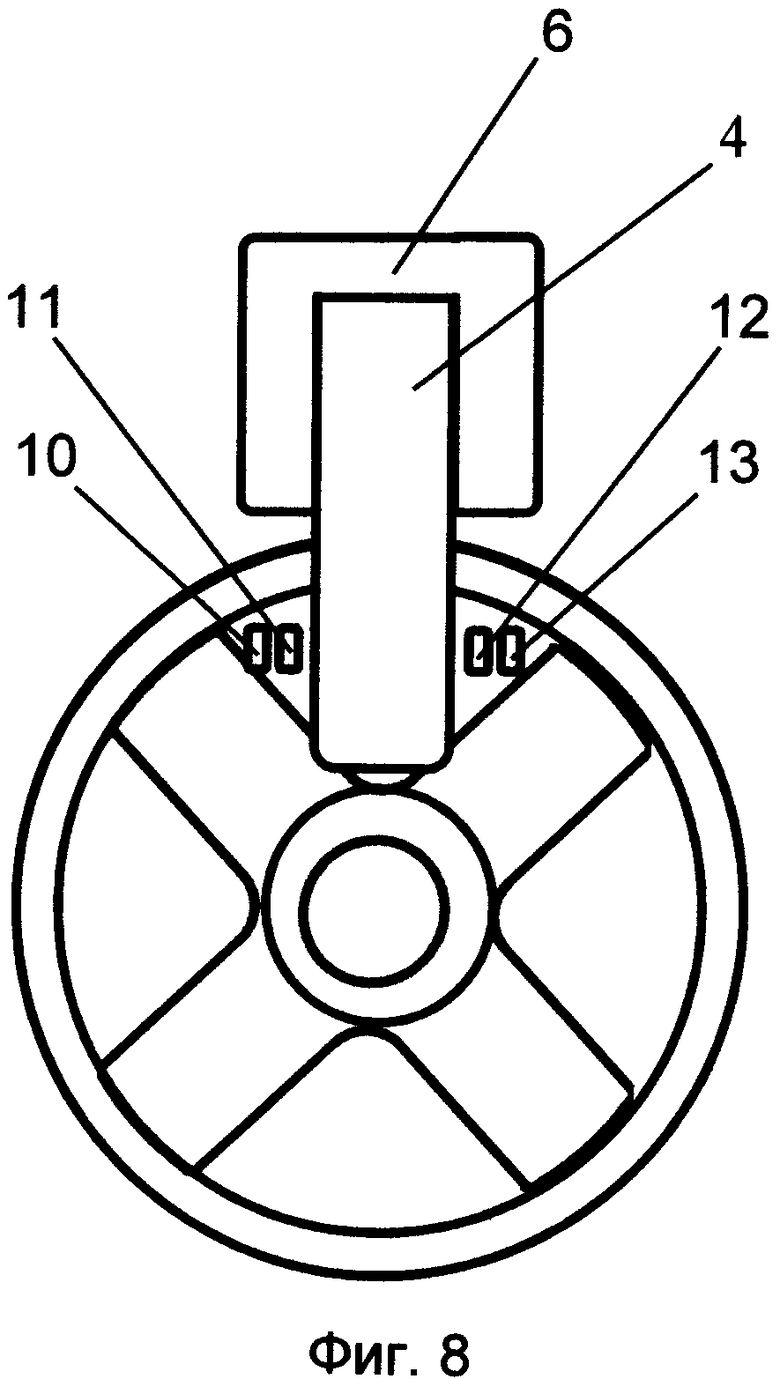
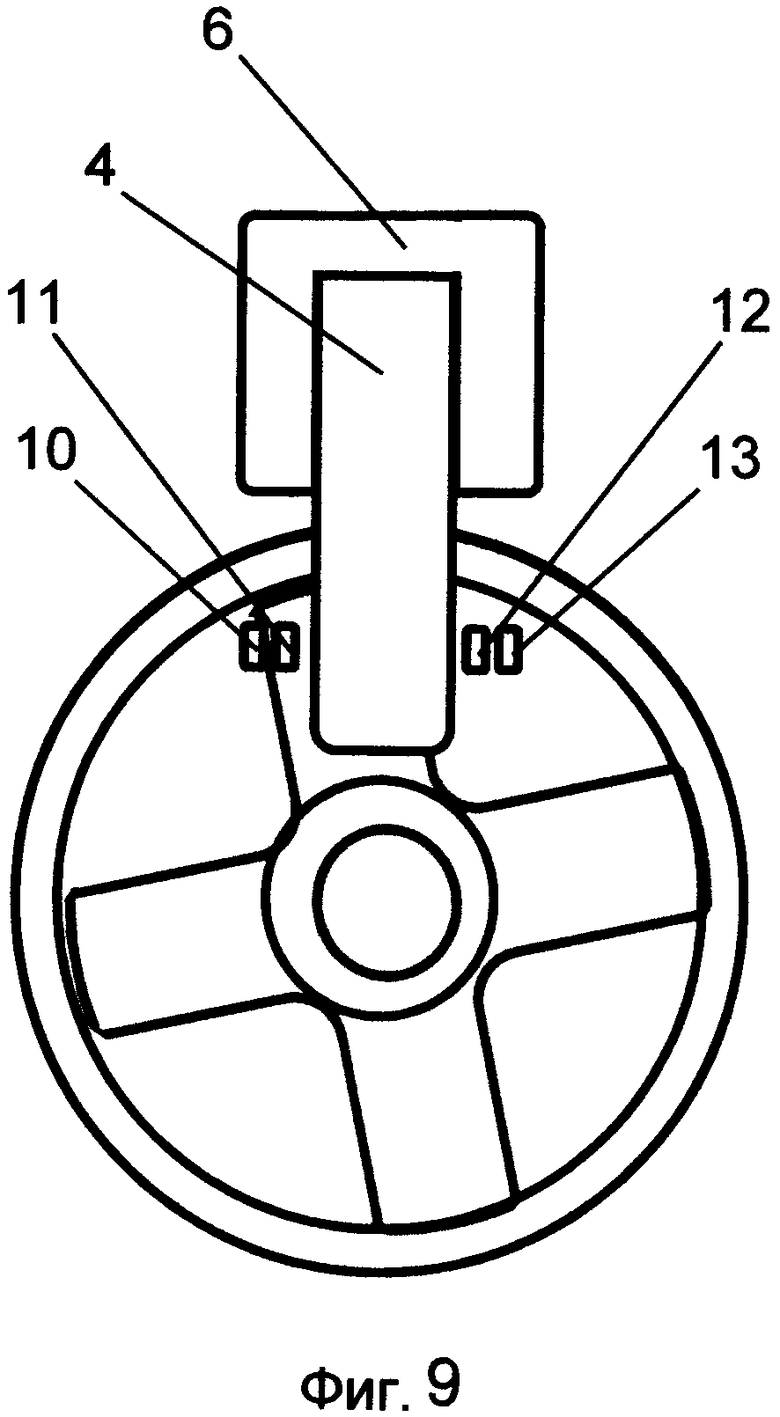
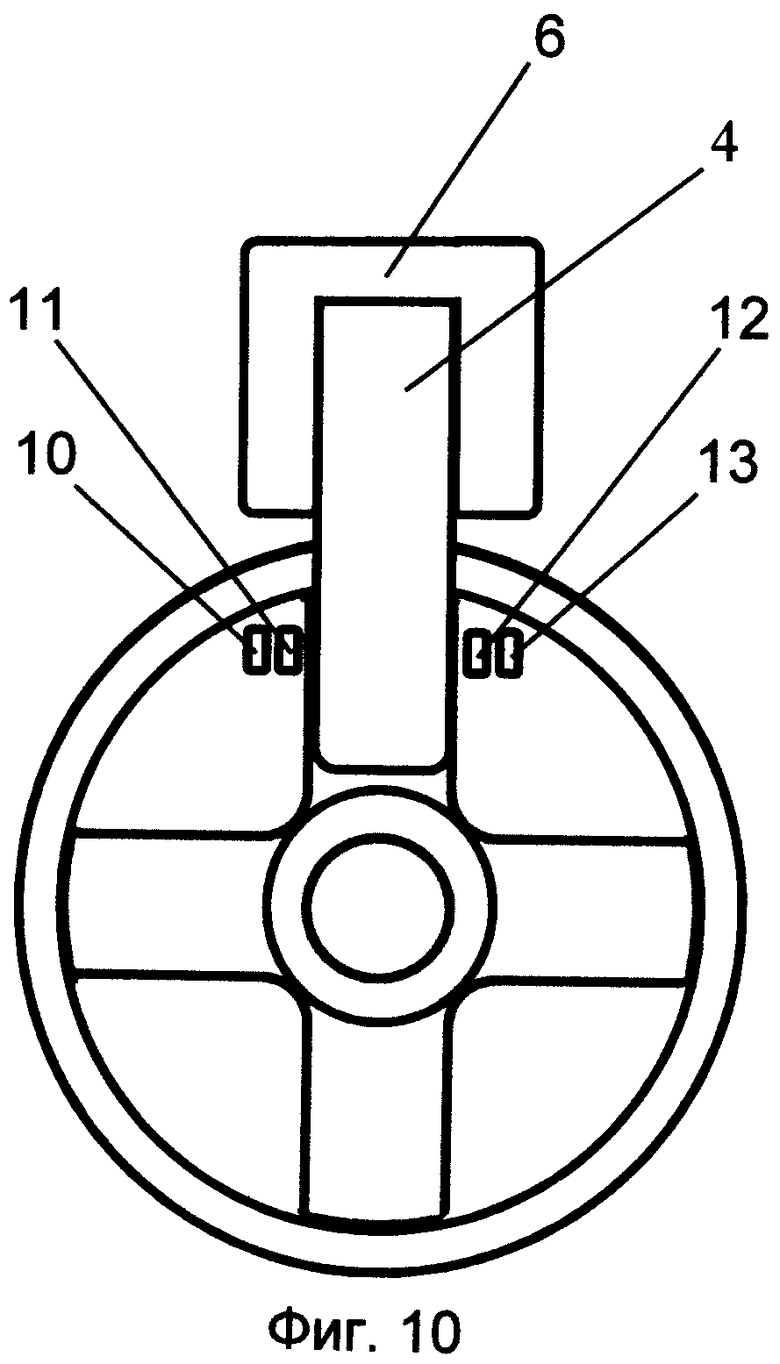
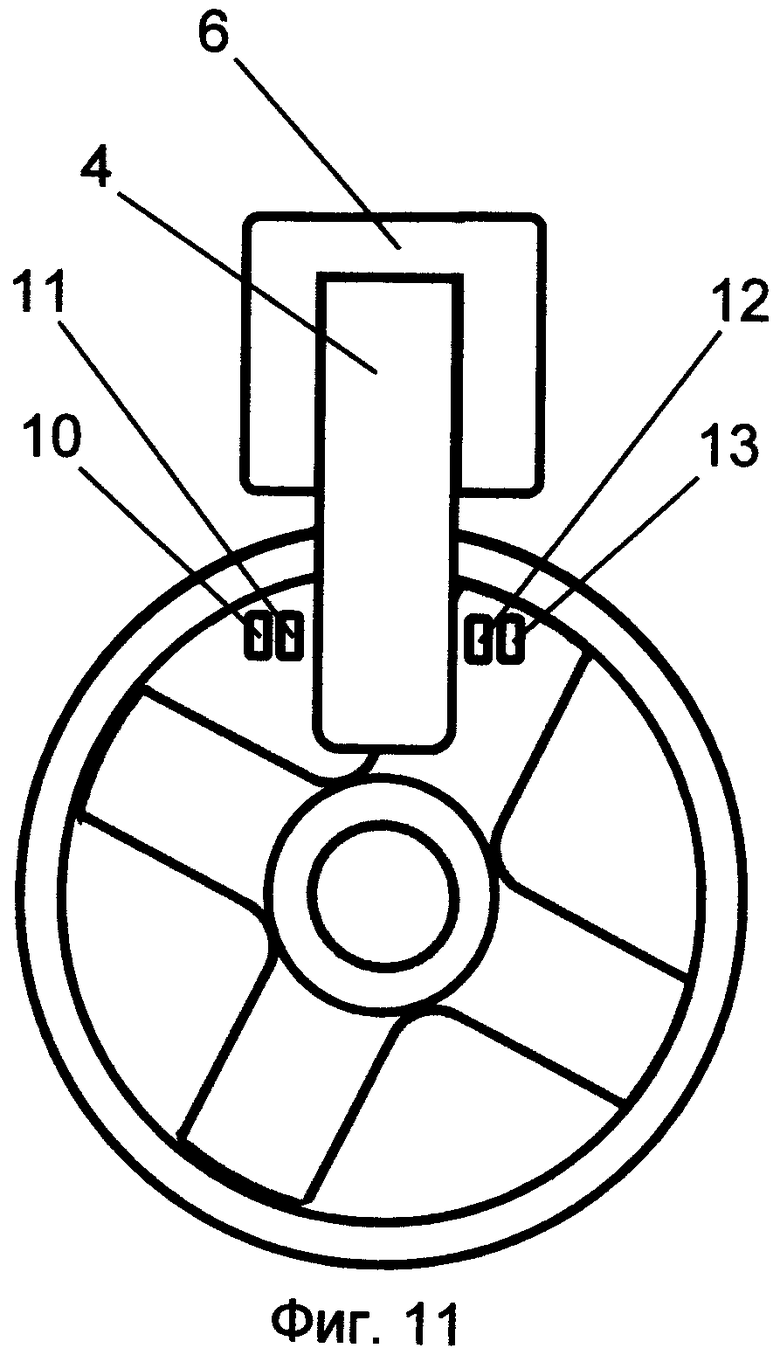
Фиг.8, 9, 10 и 11 - вид сбоку различных позиций колесного электромеханического тормоза с колесом;
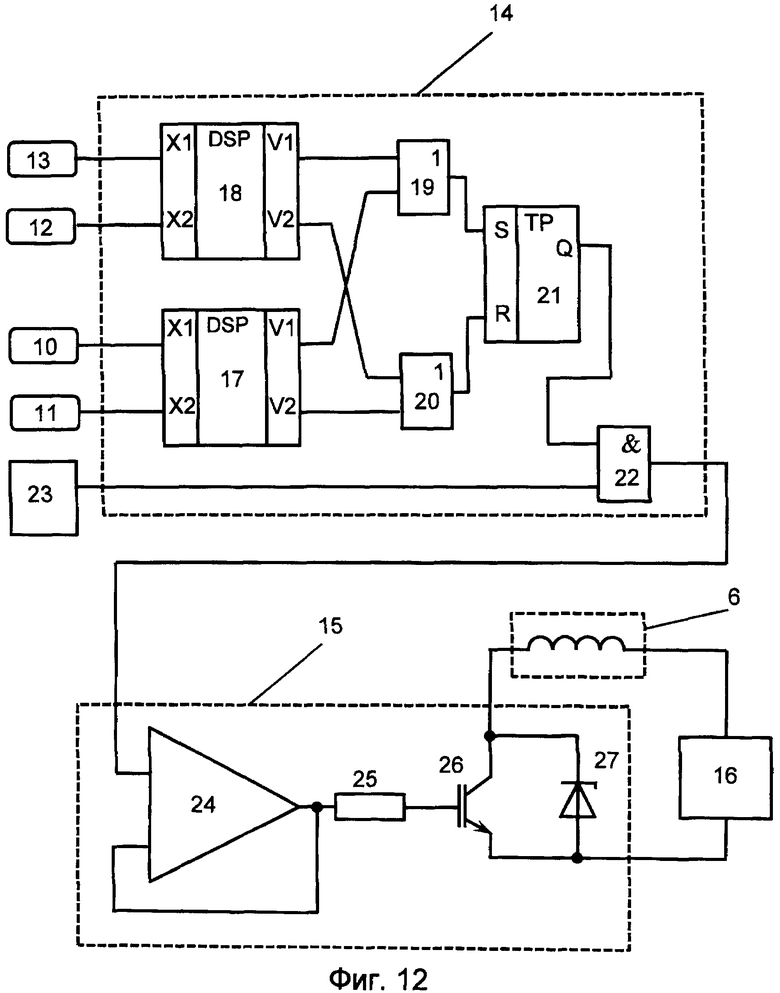
Фиг.12 - электрическая схема колесного электромеханического тормоза, включающая датчик 10, датчик 11, датчик 12 и датчик 13, управляющее устройство 14, коммутационное устройство 15, обмотку электромагнита 6 и подключенная к источнику электропитания 16 и источнику 23 сигнала команды включения торможения.
Перечень элементов на прилагаемых чертежах:
1 - ось колесной пары;
2 - колесо или колесный центр колесной пары;
3 - полюса на колесе или колесном центре;
4 - сердечник электромагнита;
5 - полюса на сердечнике 4 электромагнита;
6 - обмотка электромагнита;
7 - ступица колеса или колесного центра;
8 - обод колеса или колесного центра;
9 - отверстие в ступице колеса или колесного центра;
10, 11, 12, 13 - датчики положения полюсов колеса или колесного центра;
14 - управляющее устройство;
15 - коммутационное устройство;
16 - источник электропитания;
17, 18 - цифровой сигнальный процессор (DSP);
19, 20 - элемент 2ИЛИ;
21 - триггер RS;
22 - элемент 2И;
23 - источник команды на торможение;
24 - операционный усилитель;
25 - резистор;
26 - транзистор, силовой биполярный с изолированным затвором типа IGВТ;
27 - стабилитрон.
Колесный электромеханический тормоз состоит из: полюсов 3 колеса 2 (см. фиг.3); электромагнита, включающего в себя - сердечник 4 с полюсами 5 и обмоткой 6 (см. фиг.1, фиг.4 и фиг.5); датчиков 10, 11, 12 и 13 (см. фиг.7) положения полюсов 3 колеса; управляющего устройства 14 (см. фиг.12); коммутационного устройства 15 (см. фиг.12). Размещение колесных электромеханических тормозов на колесной паре, состоящей из оси 1 и насаженных на нее колес 2 или колесных центров, представлено на фиг.1. Колесный электромеханический тормоз (см. также фиг.6 и фиг.7), включающий в себя электромагнит, состоящий из сердечника 4 с полюсами 5 и обмотки 6, закреплен на раме тележки подвижного средства. На колесе 2 с обеих его сторон между ступицей 7 и ободом 8 выполнены полюса 3 (см. фиг.3). На фиг.6 и фиг.7 представлен вид колесного электромеханического тормоза, на котором полюс 3 колеса 2 находится между полюсами 5 сердечника 4 электромагнита, с минимальным рабочим воздушным зазором между ними. В случае, когда обмотка 6 через коммутационное устройство 15 подключена к источнику электропитания 16 (см. фиг.12), магнитное поле, создаваемое обмоткой 6 в сердечнике 4, замыкается через полюса 5, полюс 3 и рабочие воздушные зазоры между ними. Таким образом, магнитное поле создает силу, удерживающую полюс 3, передающий тормозное усилие на колесо 2. На фиг.8, 9, 10 и 11 изображен колесный электромеханический тормоз с различными положениями полюсов 3 колес 2. Размещение датчиков 10, 11, 12 и 13 (см. фиг 7) позволяет определить направление вращения полюсов 3 относительно полюсов 5 сердечника 4 электромагнита и положение относительно них полюсов 3 колес 2 для определения моментов подключения и отключения обмотки 6 коммутационным устройством 15 с помощью управляющего устройства 14 (см. фиг 12). На фиг.12 изображены электрическая схема колесного электромеханического тормоза с датчиками 10, 11, 12 и 13, управляющим устройством 14, коммутационным устройством 15 и обмоткой 6 и источник 23 сигнала команды на торможение и источник электропитания 16. Колесный электромеханический тормоз работает следующим образом. Во время движения поезда вращается колесная пара, состоящая из оси 1 и колес 2, с выполненными на них полюсами 3 (см. фиг.3). При этом управляющее устройство 14 и коммутационное устройство 15 (см. фиг.12) остаются постоянно включенными. В процессе вращения колес 2 по часовой стрелке (см. фиг.8, 9, 10 и 11) их полюса 3 периодически располагаются напротив датчиков 10, 11, 12 и 13. В момент положения полюса 3 колеса 2 напротив датчика 10, размещенного слева от полюсов 5 сердечника 4, как это изображено на фиг.8, на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал с датчика 10 (см. фиг.8 и 12) поступает на вход Х1 цифрового сигнального процессора 17. Затем полюс 3, продолжая свое движение, занимает положение и напротив датчика 11, вследствие чего на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 17. Согласно алгоритму работы цифрового сигнального процессора 17, если вначале появляется сигнал логической единицы на его входе Х1, а затем появляется сигнал логической единицы на его на входе Х2, то в дальнейшем, после перехода обоих сигналов до уровня напряжения, близкого к нулю (когда полюс 3 уже прошел датчики 10 и 11), что соответствует логическим нулям на этих входах сигнального процессора 17, на его выходе V1 формируется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 19, выполняющего логическую функцию 2ИЛИ. С выхода элемента 19 сигнал положительного уровня, соответствующий логической единице, поступает на вход S триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход элемента 22, выполняющего логическую функцию 2И. При включении режима торможения с выхода источника 23 (см. фиг.12) подается электрический сигнал положительной полярности, соответствующий логической единице, который поступает на другой вход элемента 22 управляющего устройства 14. В этом случае с выхода элемента 22 на вход операционного усилителя 24 коммутационного устройства 15 поступает электрический сигнал положительной полярности. С выхода операционного усилителя 24 через резистор 25 на затвор транзистора 26 поступает напряжение, открывающее транзистор 26, и в результате обмотка 6 электромагнита подключается к источнику электропитания 16. В это время (см. фиг.10) полюс 3 колеса 2 занимает положение между полюсами 5 сердечника 4 электромагнита. Магнитное поле, создаваемое обмоткой 6 в сердечнике 4, проходит по сердечнику 4 через его полюс 5, через рабочий воздушный зазор, полюс 3 колеса 2, снова через рабочий воздушный зазор и через другой полюс 5 замыкается на сердечник 4. Тем самым магнитное поле создает силу, удерживающую полюс 3, передающий тормозное усилие на колесо 2. В результате движения колесной пары далее, преодолевая тормозной импульс, созданный магнитным полем, колесо 2 продолжает вращаться и его полюс 3 начинает выходить из-под полюсов 5 сердечника 4 электромагнита. При этом полюс 3 вначале занимает положение напротив датчика 12 (расположенного на фиг.8 справа от полюса 5), на выходе которого появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 18 (см. фиг 12). Затем полюс 3, продолжая свое движение, занимает положение и напротив датчика 13, на выходе которого появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х1 цифрового сигнального процессора 18. Согласно алгоритму работы цифрового сигнального процессора 18, если вначале появляется сигнал положительного уровня, соответствующий логической единице, на его входе Х2, а затем сигнал положительного уровня, соответствующий логической единице, на входе Х1, то в дальнейшем, после перехода обоих сигналов до уровня напряжения, близкого к нулю (когда полюс 3 уже прошел датчики 12 и 13), что соответствует логическим нулям на этих входах сигнального процессора 18, на его выходе V2 формируется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 20, выполняющего логическую функцию 2ИЛИ. С выхода элемента 20 сигнал положительного уровня, соответствующий логической единице, поступает на вход R триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q сигнал положительного уровня напряжения, соответствующий логической единице, переходит до уровня напряжения, близкого к нулю, что соответствует логическому нулю. Этот сигнал логического нуля поступает на вход элемента 22, выполняющего логическую функцию 2И. В результате с выхода элемента 22 на вход операционного усилителя 24 больше не поступает электрический сигнал, открывающий транзистор 26 через резистор 25. Транзистор 26 закрывается и отключает обмотку 6 от источника электропитания 16. При перемещении следующего полюса 3 колеса 2 под полюса 5 сердечника 4 цикл работы процесса торможения повторяется. Этот режим продолжается до тех пор, пока при необходимости выключения режима торможения с выхода источника 23 (см. фиг.9) не прекратится подача электрического сигнала положительной полярности, соответствующего логической единице, который поступал на другой вход элемента 22 управляющего устройства 14. В этом случае с выхода элемента 22 на вход операционного усилителя 24 коммутационного устройства 15 уже не будет поступать электрический сигнал положительной полярности и торможение прекратится, так как обмотка 6 больше не будет подключаться к источнику питания 16 через транзистор 26. При движении колеса 2 и его полюса 3 против часовой стрелки (см. фиг.8, 9, 10 и 11) колесный электромеханический тормоз работает следующим образом. В процессе вращения полюса 3 (см. фиг.11) против часовой стрелки он вначале занимает положение напротив датчика 13, расположенного на фиг.11 справа относительно полюса 5, вследствие чего на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице, который на фиг.12 поступает на вход Х1 цифрового сигнального процессора 18. Затем полюс 3 занимает положение и напротив датчика 12, вследствие чего на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице, который поступает на вход Х2 цифрового сигнального процессора 18. Согласно алгоритму работы цифрового сигнального процессора 18, если вначале появляется сигнал логической единицы на его входе Х1, а затем появляется сигнал логической единицы на его на входе Х2, то в дальнейшем (когда полюс 3 уже прошел датчик 13 и датчик 12) после перехода обоих сигналов до уровня напряжения, близкого к нулю, что соответствует логическому нулю на этих входах сигнального процессора 18, на его выходе V1 формируется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 19, выполняющего логическую функцию 2ИЛИ. С выхода элемента 19 сигнал положительного уровня, соответствующий логической единице, поступает на вход S триггера 21, выполняющего логическую функцию триггера RS. В результате триггер 21 переходит в состояние, при котором на его выходе Q появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход элемента 22, выполняющего логическую функцию 2И. При включении режима торможения с выхода источника 23 (см. фиг.12) подается электрический сигнал положительной полярности, соответствующий логической единице, который поступает на другой вход элемента 22 управляющего устройства 14. В этом случае с выхода элемента 22 на вход операционного усилителя 24 коммутационного устройства 15 поступает электрический сигнал положительной полярности. С выхода операционного усилителя 24 через резистор 25 на затвор транзистора 26 поступает напряжение, открывающее транзистор 26, и в результате обмотка 6 электромагнита подключается к источнику электропитания 16. В это время (см. фиг.10) полюс 3 колеса 2 занимает положение между полюсами 5 сердечника 4 электромагнита. Магнитное поле, создаваемое обмоткой 6, проходит по сердечнику 4 через его полюс 5, через рабочий воздушный зазор, полюс 3 колеса 2, через рабочий воздушный зазор и через другой полюс 5 замыкается на сердечник 4. Тем самым магнитное поле создает силу, удерживающую полюс 3, передающий тормозное усилие на колесо 2. В результате движения колесной пары далее, преодолев тормозной импульс, созданный магнитным полем, колесо 2 продолжает вращаться и его полюс 3 начинает выходить из под полюсов 5 сердечника 4 электромагнита. При этом полюс 3 вначале занимает положение напротив датчика 11, на выходе которого появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 17. Затем полюс 3 занимает положение и напротив датчика 10, на выходе которого появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х1 цифрового сигнального процессора 17. Согласно алгоритму работы цифрового сигнального процессора 17, если вначале появляется сигнал положительного уровня, соответствующий логической единице, на его входе Х2, а затем сигнал положительного уровня, соответствующий логической единице, на входе Х1, то в дальнейшем (когда полюс 3 уже прошел датчик 11 и датчик 10) после перехода обоих сигналов до уровня напряжения, близкого к нулю, что соответствует логическому нулю на этих входах сигнального процессора 17, на его выходе V2 появляется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 20, выполняющего логическую функцию 2ИЛИ. С выхода элемента 20 сигнал положительного уровня, соответствующий логической единице, поступает на вход R триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q сигнал положительного уровня напряжения, соответствующий логической единице, переходит до уровня напряжения, близкого к нулю, что соответствует логическому нулю. Этот сигнал логического нуля поступает на вход элемента 22, выполняющего логическую функцию 2И. В результате с выхода элемента 22 на вход операционного усилителя 24 больше не поступает электрический сигнал, открывающий транзистор 26 через резистор 25. Транзистор 26 закрывается и отключает обмотку 6 от источника электропитания 16. При перемещении следующего полюса 3 под полюса 5 сердечника 4 цикл работы процесса торможения повторяется. Этот режим продолжается до тех пор, пока при выключении режима торможения с выхода источника 23 команды на торможение (см. фиг.12) не прекратится подача электрического сигнала положительной полярности, соответствующего логической единице, который поступал на другой вход элемента 22 управляющего устройства 14. В этом случае с выхода элемента 22 на вход операционного усилителя 24 коммутационного устройства 15 уже не будет поступать электрический сигнал положительной полярности и торможение прекратится, так как обмотка 6 больше не будет подключаться к источнику питания 16 через транзистор 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОСЕВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ | 2011 |
|
RU2450940C1 |
| ДИСКОВЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ | 2011 |
|
RU2452636C1 |
| Колесный электромеханический тормоз самолета | 2016 |
|
RU2624528C1 |
| Многополюсный колесный электромеханический тормоз автомобиля | 2017 |
|
RU2648506C1 |
| Колесный электромеханический тормоз автомобиля | 2016 |
|
RU2640679C1 |
| Двухполюсный колесный электромеханический тормоз автомобиля | 2017 |
|
RU2634500C1 |
| ДИСКОВЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ САМОЛЕТА | 2015 |
|
RU2589527C9 |
| ДИСКОВЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ САМОЛЕТА | 2015 |
|
RU2586098C9 |
| ДИСКОВЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ САМОЛЕТА | 2015 |
|
RU2585682C9 |
| МНОГОДИСКОВЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ САМОЛЕТА | 2015 |
|
RU2597427C9 |
Изобретение относится к тормозным устройствам подвижных железнодорожных транспортных средств. Колесный электромеханический тормоз содержит электромагнит, колесо или колесный центр, на котором выполнены из магнитного материала полюса. Между полюсами сердечника электромагнита размещены полюса колеса или колесного центра. По окружности рядом с полюсами сердечника электромагнита размещены датчики положения полюсов колеса или колесного центра. Датчики подключены своими выходами ко входам управляющего устройства. Управляющее устройство соединено своим выходом со входом коммутационного устройства, подключающего обмотку электромагнита к источнику электропитания. К другому входу управляющего устройства подключен выход источника команды включения режима торможения. Технический результат заключается в повышении надежности тормозов. 12 ил.
Колесный электромеханический тормоз, отличающийся тем, что на колесе или колесном центре выполнены из магнитного материала полюса, ориентированные радиально в плоскости, перпендикулярной к оси вращения колесной пары, к тележке прикреплен электромагнит, между полюсами сердечника которого с минимальным рабочим воздушным зазором размещены полюса колеса или колесного центра, по окружности рядом с полюсами сердечника электромагнита размещены датчики положения полюсов колеса или колесного центра, подключенные своими выходами ко входам управляющего устройства, соединенного своим выходом со входом коммутационного устройства, которое подключает обмотку электромагнита к источнику электропитания, к другому входу управляющего устройства подключен выход источника команды включения режима торможения.
| СПОСОБ ОТЛИВКИ ЦЕПЕЙ В ПЕСЧАНЫХ ФОРМАХ | 1998 |
|
RU2123903C1 |
| Тепловая труба | 1985 |
|
SU1305519A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ТОРМОЗ | 2003 |
|
RU2241874C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ТОРМОЗ | 2005 |
|
RU2279753C1 |

