Изобретение относится к тормозным устройствам шасси самолета.
Известен дисковый электромеханический тормоз самолета, содержащий тормозной диск, закрепленный на колесе шасси. На тормозном диске из магнитного материала выполнены полюса, ориентированные радиально в плоскости тормозного диска и перпендикулярно к оси вращения диска. На основной опоре шасси закреплен электромагнит, на концах сердечника которого выполнены полюса. Между полюсами сердечника электромагнита размещается с минимальным рабочим воздушным зазором тормозной диск. По окружности рядом с полюсом сердечника электромагнита размещены датчики положения полюсов тормозного диска, подключенные своими выходами к входам управляющего устройства. Управляющее устройство соединено своим выходом с входом коммутационного устройства, которое подключает обмотку электромагнита к источнику электропитания. К другому входу управляющего устройства подключен выход устройства регулирования тормозной силы. Устройство фиксатора диска, содержащее штифт фиксатора диска, прикреплено к основной опоре шасси самолета рядом с тормозным диском (см. патент РФ №2589527 от 07.05.2015, МПК В64С 25/42, B60L 7/24).
Технический результат заключается в повышении надежности и износостойкости тормозов по сравнению с дисковыми тормозами, использующими трение тормозных колодок о тормозной диск.
Наиболее близким прототипом является дисковый электромеханический тормоз самолета, в котором тормозной диск выполнен из магнитного материала в форме полюсов, ориентированных радиально в плоскости тормозного диска и перпендикулярно к оси вращения диска. Вместо суппорта с рабочими цилиндрами вводится электромагнит аксиальной формы с ориентированными радиально полюсами, выполненными в плоскости, параллельной плоскости тормозного диска, и с минимальным рабочим воздушным зазором между полюсами электромагнита и полюсами тормозного диска. По окружности рядом с полюсами электромагнита располагают датчики положения полюсов тормозного диска. Посредством коммутационного устройства работой электромагнита управляет управляющее устройство, подключенное своими входами - к выходам датчиков положения полюсов тормозного диска и к выходу устройства регулирования тормозной силы, а выходом ко входу коммутационного устройства, подключающего обмотку электромагнита к источнику электропитания. Рядом с тормозным диском крепится к оси колеса основной стойки шасси устройство фиксатора диска (см. патент РФ №2585682 от 29.05.2015, МПК В64С 25/42, B60L 7/24).
При всех достоинствах аналога и прототипа, заключающихся в отсутствии трибопары - тормозных колодок или накладок и тормозного диска, остается необходимость тормозного диска, на котором выполнены полюса, и устройств крепления его к колесу. Такая конструкция снижает надежность электромеханического тормоза самолета, являющегося прототипом.
Целью изобретения является повышение надежности электромеханического тормоза самолета.
Поставленная цель достигается устранением в электромеханическом тормозе самолета диска, на котором выполнены полюса, и деталей крепления его к колесу.
Для этого колесный электромеханический тормоз самолета включает в себя выполненные на колесе самолета из магнитного материала полюса, ориентированные с минимальным воздушным зазором параллельно полюсам электромагнита, выполненным из магнитного материала, на оси основного шасси самолета, между которыми на оси шасси самолета размещена обмотка электромагнита, и по окружности рядом с полюсом электромагнита размещены датчики положения полюса колеса самолета, подключенные своими выходами к входам управляющего устройства, соединенного своим выходом к входу коммутационного устройства, которое подключает обмотку электромагнита к источнику электропитания. К другому входу управляющего устройства подключен выход устройства регулирования тормозной силы. Фиксатор колесного полюса, содержащий штифт фиксатора колесного полюса, прикреплен к основной опоре шасси самолета рядом с полюсом электромагнита и траекторией движения колесного полюса.
Прилагаемые чертежи изображают:
Фиг. 1 - колесо самолета с колесным электромеханическим тормозом;
Фиг. 2 - колесный электромеханический тормоз самолета при положении колесных полюсов 2 напротив полюсов электромагнита 4;
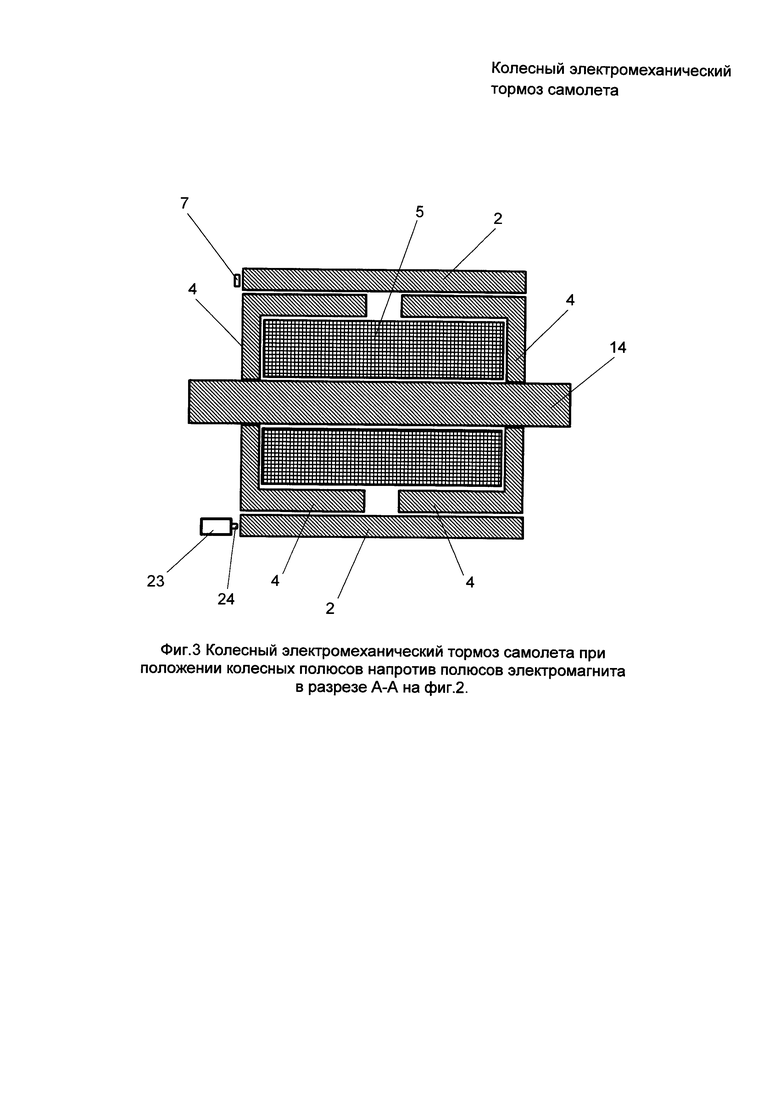
Фиг. 3 - колесный электромеханический тормоз самолета при положении колесных полюсов 2 напротив полюсов электромагнита 4 в разрезе А-А на фиг. 2;
Фиг. 4 - колесный электромеханический тормоз самолета при положении колесных полюсов 2 между полюсами электромагнита 4;
Фиг. 5 - электрическая схема: датчики 6, 7, 8 и 9, управляющее устройство 10, коммутационное устройство 12, обмотка электромагнита 5, источник электропитания 13 и устройство 11 регулирования тормозной силы.
Перечень элементов на прилагаемых чертежах:
1 - обод колеса;
2 - колесный полюс;
3 - подшипник;
4 - полюс электромагнита;
5 - обмотка электромагнита;
6, 7, 8, 9 - датчики;
10 - управляющее устройство;
11 - устройство регулирования тормозной силы;
12 - коммутационное устройство;
13 - источник электропитания;
14 - ось шасси самолета;
15 - пневматик;
16 - колесо самолета;
17 - цифровой сигнальный процессор (DSP);
18 - цифровой сигнальный процессор (DSP);
19 - элемент 2ИЛИ;
20 - элемент 2ИЛИ;
21 - триггер RS;
22 - элемент 2И;
23 - фиксатор колесного полюса;
24 - штифт фиксатора колесного полюса.
Колесный электромеханический тормоз самолета состоит из колесных полюсов 2 (см. фиг. 1 и фиг. 2), выполненных на ободе колеса самолета 1; электромагнита, включающего в себя полюса электромагнита 4, выполненные на оси шасси самолета 14, и обмотку электромагнита 5 (см. фиг. 1, фиг. 2 и фиг. 3); датчиков 6, 7, 8 и 9 положения колесных полюсов (см. фиг. 1, фиг. 2, и фиг. 5), управляющего устройства 10, устройства 11 регулирования тормозной силы и коммутационного устройства 12 (см. фиг. 5). Фиксатор колесного полюса 23 прикреплен к стойке шасси самолета.
На фиг. 2 изображено положение колесных полюсов 2, вращающихся в направлении по часовой стрелке, обозначенном пунктирными линиями со стрелками, напротив полюсов электромагнита 4.
На фиг. 3 изображен колесный электромеханический тормоз самолета при положении колесных полюсов 2 напротив полюсов электромагнита 4 в разрезе А-А на фиг. 2.
На фиг. 4 изображено положение колесных полюсов 2, вращающихся в направлении по часовой стрелке, обозначенном пунктирными линиями со стрелками, между полюсами электромагнита 4.
На фиг. 5 изображена электрическая схема колесного электромеханического тормоза самолета: датчики 6, 7, 8 и 9, управляющее устройство 10, коммутационное устройство 12, обмотка электромагнита 5, источник электропитания 13 и устройство 11 регулирования тормозной силы.
Колесный электромеханический тормоз самолета работает следующим образом.
Во время приземления при посадке колесо самолета 16 начинает вращаться с закрепленными на ободе колеса 1 колесными полюсами 2 (см. фиг. 1 и фиг. 2). При этом управляющее устройство 10 и коммутационное устройство 12 (см. фиг. 5) остаются постоянно включенными. Устройство фиксатора колесного полюса 23 не фиксирует колесный полюс 2.
В процессе вращения колесных полюсов 2 по часовой стрелке (см. фиг. 2) они периодически помещаются напротив датчиков 6, 7, 8 и 9.
В момент положения колесного полюса 2 напротив датчика 6 на выходе этого датчика 6 появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал с выхода датчика 6 поступает на вход Х1 цифрового сигнального процессора 17. Затем колесный полюс 2, продолжая свое движение, занимает положение и напротив датчика 7, вследствие чего на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 17. Согласно алгоритму работы цифрового сигнального процессора 17, если вначале появляется сигнал логической единицы на его входе Х1, а затем появляется сигнал логической единицы на его на входе Х2, то в дальнейшем после перехода обоих сигналов до уровня напряжения, близкого к нулю, что соответствует логическому нулю на этих входах сигнального процессора 17, на его выходе V1 формируется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 19, выполняющего логическую функцию 2ИЛИ. С выхода элемента 19 сигнал положительного уровня, соответствующий логической единице, поступает на вход S триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход элемента 22, выполняющего логическую функцию 2И. При необходимости включения режима торможения с выхода устройства 11 (см. фиг. 5) подается широтно-импульсный модулированный электрический сигнал положительной полярности, который поступает на другой вход элемента 22 управляющего устройства 10. В этом случае с выхода элемента 22 на вход коммутационного устройства 12 поступает широтно-импульсный модулированный электрический сигнал положительной полярности. В результате коммутационное устройство 12 подключает один конец обмотки электромагнита 5 к источнику электропитания 13, другой выход которого подсоединен непосредственно к другому концу обмотки электромагнита 5. В это время (см. фиг. 2) колесный полюс 2 занимает положение напротив полюсов электромагнита 4 параллельно им. Магнитное поле, создаваемое обмоткой 5, проходит через один полюс электромагнита 4, через рабочий воздушный зазор между параллельными полюсами электромагнита 4 и колесным полюсом 2, колесным полюсом 2, через рабочий воздушный зазор между параллельными полюсами электромагнита 4 и колесным полюсом 2, и через другой полюс 4 электромагнита замыкается на электромагнит. Тем самым магнитное поле удерживает колесный полюс 2, передающий тормозную силу колесу самолета 16. В результате вращения колеса самолета 16 далее, преодолевая тормозной импульс, созданный магнитным полем электромагнита, продолжает вращаться и его колесный полюс 2, начинающий выходить из под полюсов электромагнита 4. При этом колесный полюс 2 вначале занимает положение напротив датчика 8, на выходе которого появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 18. Затем колесный полюс 2, продолжая свое движение, занимает положение и напротив датчика 9, на выходе которого появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х1 цифрового сигнального процессора 18. Согласно алгоритму работы цифрового сигнального процессора 18, если вначале появляется сигнал положительного уровня, соответствующий логической единице, на его входе Х2, а затем сигнал положительного уровня, соответствующий логической единице, на входе Х1, то в дальнейшем, после перехода обоих сигналов до уровня напряжения, близкого к нулю, что соответствует логическому нулю на этих входах сигнального процессора 18, на его выходе V2 формируется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 20, выполняющего логическую функцию 2ИЛИ. С выхода элемента 20 сигнал положительного уровня, соответствующий логической единице, поступает на вход R триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q сигнал положительного уровня напряжения, соответствующий логической единице, переходит до уровня напряжения, близкого к нулю, что соответствует логическому нулю. Этот сигнал логического нуля поступает на вход элемента 22, выполняющего логическую функцию 2И. В результате с выхода элемента 22 на вход коммутационного устройства 12 больше не поступает электрический сигнал положительного уровня напряжения. Поэтому коммутационное устройство 12 отключает обмотку 5 от источника электропитания 13. При перемещении следующего колесного полюса 2 под полюса электромагнита 4 цикл работы процесса торможения повторяется.
Широтно-импульсный модулированный электрический сигнал с выхода устройства регулирования тормозной силы 11 осуществляет управление средним значением напряжения на нагрузке путем изменения скважности импульсов, управляющих коммутационным устройством 12 для регулирования тормозной силы, действующей на колесо самолета 16.
Этот режим продолжается до тех пор, пока при необходимости выключения режима торможения с выхода устройства 11 (см. фиг. 5) не прекратится подача электрического сигнала положительной полярности, который поступал на другой вход элемента 22 управляющего устройства 10. В этом случае с выхода элемента 22 на вход коммутационного устройства 12 уже не будет поступать электрический сигнал положительной полярности и торможение прекратится, так как обмотка электромагнита 5 больше не будет подключаться к источнику питания 13.
При движении колеса самолета 16 и колесного полюса 2 против часовой стрелки колесный электромеханический тормоз самолета работает следующим образом. В процессе вращения колесного полюса 2 (см. фиг. 2 фиг. 4) против часовой стрелки колесный полюс 2 вначале занимает положение напротив датчика 9, вследствие чего на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал с датчика 9 поступает на вход Х1 цифрового сигнального процессора 18. Затем колесный полюс 2 занимает положение и напротив датчика 8, вследствие чего на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 18. Согласно алгоритму работы цифрового сигнального процессора 18, если вначале появляется сигнал логической единицы на его входе Х1, а затем появляется сигнал логической единицы на его на входе Х2, то в дальнейшем после перехода обоих сигналов до уровня напряжения, близкого к нулю, что соответствует логическому нулю на этих входах сигнального процессора 18, на его выходе V1 формируется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 19, выполняющего логическую функцию 2ИЛИ. С выхода элемента 19 сигнал положительного уровня, соответствующий логической единице, поступает на вход S триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход элемента 22, выполняющего логическую функцию 2И. При необходимости включения режима торможения с выхода устройства регулирования тормозной силы 11 (см. фиг. 5) подается электрический сигнал положительной полярности, соответствующий логической единице, который поступает на другой вход элемента 22 управляющего устройства 10. В этом случае с выхода элемента 22 на вход коммутационного устройства 12 поступает электрический сигнал положительной полярности. Коммутационное устройство 12 подключает обмотку электромагнита 5 к источнику электропитания 13. В это время колесный полюс 2 занимает положение напротив полюсов электромагнита 4, параллельно им (см. фиг. 2 и фиг. 3). Магнитное поле, создаваемое обмоткой электромагнита 5, через его полюс электромагнита 4, через рабочий воздушный зазор, колесный полюс 2, через рабочий воздушный зазор и через другой полюс электромагнита 4 замыкается на электромагнит. Тем самым магнитное поле удерживает колесный полюс 2, передающий тормозное усилие на колесо самолета 16. В результате вращения колеса самолета 16 далее, преодолев тормозной импульс, созданный магнитным полем, колесный полюс 2 продолжает вращаться и выходить из под полюсов 4 сердечника 3 электромагнита. При этом полюс 2 вначале занимает положение напротив датчика 7, на выходе которого появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 17. Затем полюс 2 занимает положение и напротив датчика 6, на выходе которого появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х1 цифрового сигнального процессора 17. Согласно алгоритму работы цифрового сигнального процессора 17, если вначале появляется сигнал положительного уровня, соответствующий логической единице, на его входе Х2, а затем сигнал положительного уровня, соответствующий логической единице, на входе Х1, то в дальнейшем, после перехода обоих сигналов до уровня напряжения, близкого к нулю, что соответствует логическому нулю, на этих входах сигнального процессора 17, на его выходе V2 появляется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 20, выполняющего логическую функцию 2ИЛИ. С выхода элемента 20 сигнал положительного уровня, соответствующий логической единице, поступает на вход R триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q сигнал положительного уровня напряжения, соответствующий логической единице, переходит до уровня напряжения, близкого к нулю, что соответствует логическому нулю. Этот сигнал логического нуля поступает на вход элемента 22, выполняющего логическую функцию 2И. В результате с выхода элемента 22 на вход коммутационного устройства 12 больше не поступает электрический сигнал положительного уровня и оно отключает обмотку электромагнита 5 от источника электропитания 13. При перемещении следующего колесного полюса 2 под полюс электромагнита 4 цикл работы процесса торможения повторяется. Этот режим продолжается до тех пор, пока при необходимости выключения режима торможения с выхода устройства регулирования тормозной силы 11 (см. фиг. 5) не прекратится подача электрического сигнал положительной полярности, который поступал на другой вход элемента 22 управляющего устройства 10. В этом случае с выхода элемента 22 на вход коммутационного устройства 12 уже не будет поступать электрический сигнал положительной полярности и торможение прекратится, так как обмотка электромагнита 5 больше не будет подключаться к источнику питания 13 через коммутационное устройство 12.
Фиксатор колесного полюса 23 (см. фиг. 1) после полной остановки вращения колесных полюсов 2 выдвигает штифт фиксатора колесного полюса 24 в пространство между колесными полюсами 2 и тем самым предотвращает вращение колеса самолета. После этого колесный электромеханический тормоз самолета может быть обесточен.




Изобретение относится к тормозным устройствам колес шасси самолета. Колесный электромеханический тормоз самолета содержит выполненные на колесе самолета из магнитного материала полюса, ориентированные с минимальным воздушным зазором параллельно полюсам электромагнита. Полюса электромагнита выполнены также из магнитного материала на оси шасси самолета, между которыми на оси шасси самолета размещена обмотка электромагнита. По окружности рядом с полюсом электромагнита размещены датчики положения колесного полюса, подключенные своими выходами к входам управляющего устройства, соединенного своим выходом с входом коммутационного устройства, которое подключает обмотку электромагнита к источнику электропитания. К другому входу управляющего устройства подключен выход устройства регулирования тормозной силы. Фиксатор колесного полюса содержит штифт и прикреплен к опоре шасси самолета рядом с полюсом электромагнита и траекторией движения колесного полюса. Достигается повышение надежности электромеханического тормоза самолета. 5 ил.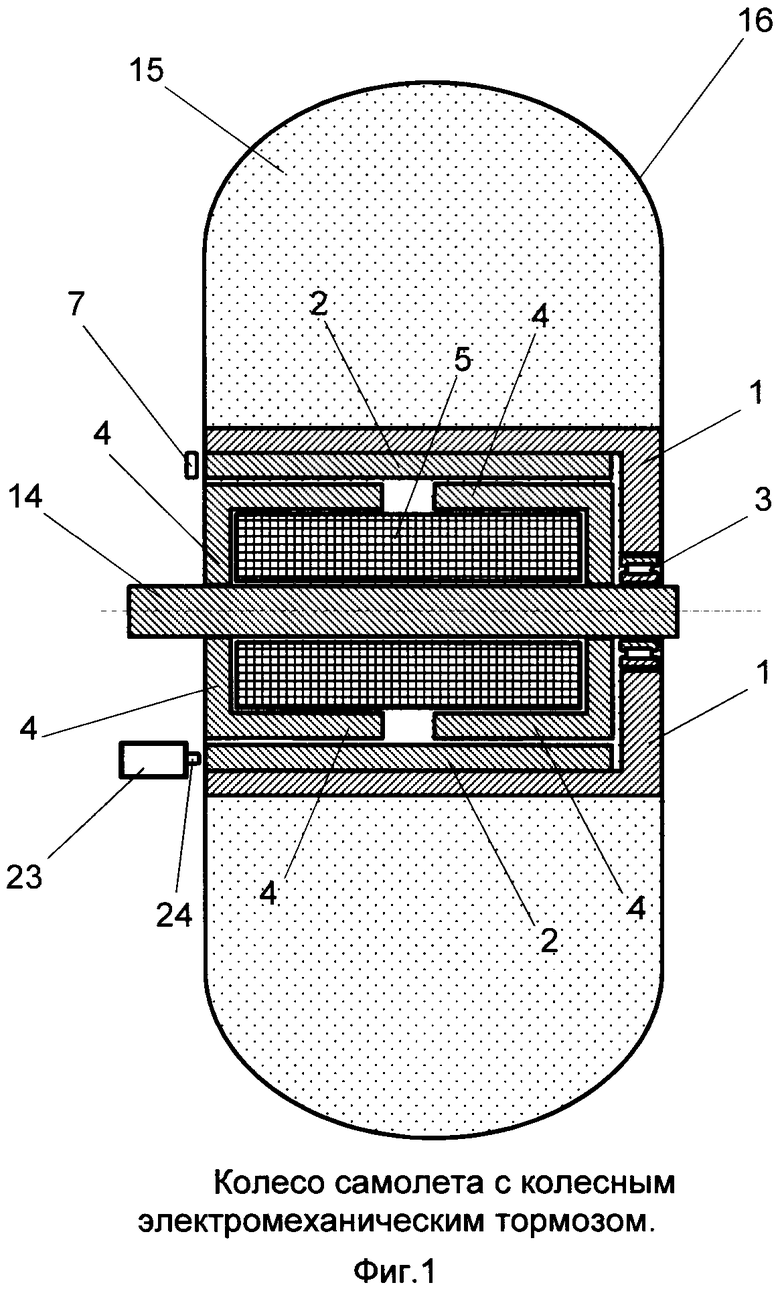
Колесный электромеханический тормоз самолета, отличающийся тем, что на колесе самолета выполнены из магнитного материала колесные полюса, ориентированные с минимальным воздушным зазором параллельно полюсам электромагнита, выполненным из магнитного материала на оси шасси самолета, между которыми на оси шасси самолета размещена обмотка электромагнита, и по окружности рядом с полюсом электромагнита размещены датчики положения колесного полюса, подключенные своими выходами к входам управляющего устройства, соединенного своим выходом с входом коммутационного устройства, которое подключает обмотку электромагнита к источнику электропитания, к другому входу управляющего устройства подключен выход устройства регулирования тормозной силы, фиксатор колесного полюса, содержащий штифт фиксатора колесного полюса, прикреплен к опоре шасси самолета рядом с полюсом электромагнита и траекторией движения колесного полюса.
| КОЛЕСНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ | 2011 |
|
RU2455176C1 |
| ОСЕВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ | 2011 |
|
RU2450940C1 |
| СПОСОБ ОТЛИВКИ ЦЕПЕЙ В ПЕСЧАНЫХ ФОРМАХ | 1998 |
|
RU2123903C1 |

