Изобретение относится к тормозным устройствам шасси самолета.
Известен дисковый тормоз с гидравлическим приводом установленный на колесе основной опоры шасси с внутренней стороны. Тормозной диск прикреплен к внутренней половине барабана колеса самолета. При торможении поршень суппорта прижимает нажимную тормозную пластину к тормозному диску, с другой стороны которого к нему прижимается другая неподвижная тормозная пластина. (В.М. Корнеев Конструкция и летная эксплуатация самолета Diamond DA 40 NG «Tundra». 2014. С. 3, 38).
Наиболее близким прототипом является дисковый тормоз самолета, установленный на оси основной стойки шасси самолета. В состав конструкции тормоза входят: суппорт тормоза с рабочим тормозным цилиндром; тормозные колодки тормоза; тормозной диск, прикрепленный к барабану колеса. Торможение в нем осуществляется при прижатии гидроцилиндром тормозных колодок к тормозному диску, прикрепленному к барабану колеса самолета (С.Н. Демешко Конструкция и эксплуатация самолета P2002JF, P2002JR. Екатеринбург: Уральский УТЦ ГА, 2010. С. 22-24).
Недостатки аналога и прототипа заключаются в высокой степени износа тормозных колодок или накладок и тормозного диска. Кроме того, значительные затраты расходуются на частое техническое обслуживание и неразрушающий контроль деталей трибопары дискового тормоза, включающего тормозные накладки и тормозной диск. К настоящему времени соответствующими технологическими инструкциями предусмотрены различные методы неразрушающего контроля: визуальный, вихретоковый, магнитопорошковый и ультразвуковой, что определяет возрастающие расходы на техническое обслуживание.
Целью изобретения является повышение надежности дисковых тормозов, снижение затрат на техническое обслуживание и неразрушающий контроль деталей дисковых тормозов.
Поставленная цель достигается устранением трения элементов тормозного привода с тормозным диском в дисковых тормозах.
Для этого тормозной диск выполнен из магнитного материала в форме полюсов, ориентированных радиально в плоскости тормозного диска и перпендикулярно к оси вращения диска. Вместо суппорта с рабочими цилиндрами вводится электромагнит, аксиальной формы с ориентированными радиально полюсами, выполненными в плоскости, параллельной плоскости тормозного диска и с минимальным рабочим воздушным зазором между полюсами электромагнита и полюсами тормозного диска. По окружности рядом с полюсами электромагнита располагают датчики положения полюсов тормозного диска. Посредством коммутационного устройства работой электромагнита управляет управляющее устройство, подключенное своими входами к выходам датчиков положения полюсов тормозного диска и к выходу устройства регулирования тормозной силы, а выходом ко входу коммутационного устройства, подключающего обмотку электромагнита к источнику электропитания. Рядом с тормозным диском крепится к оси колеса основной стойки шасси устройство фиксатора диска.
Прилагаемые чертежи изображают:
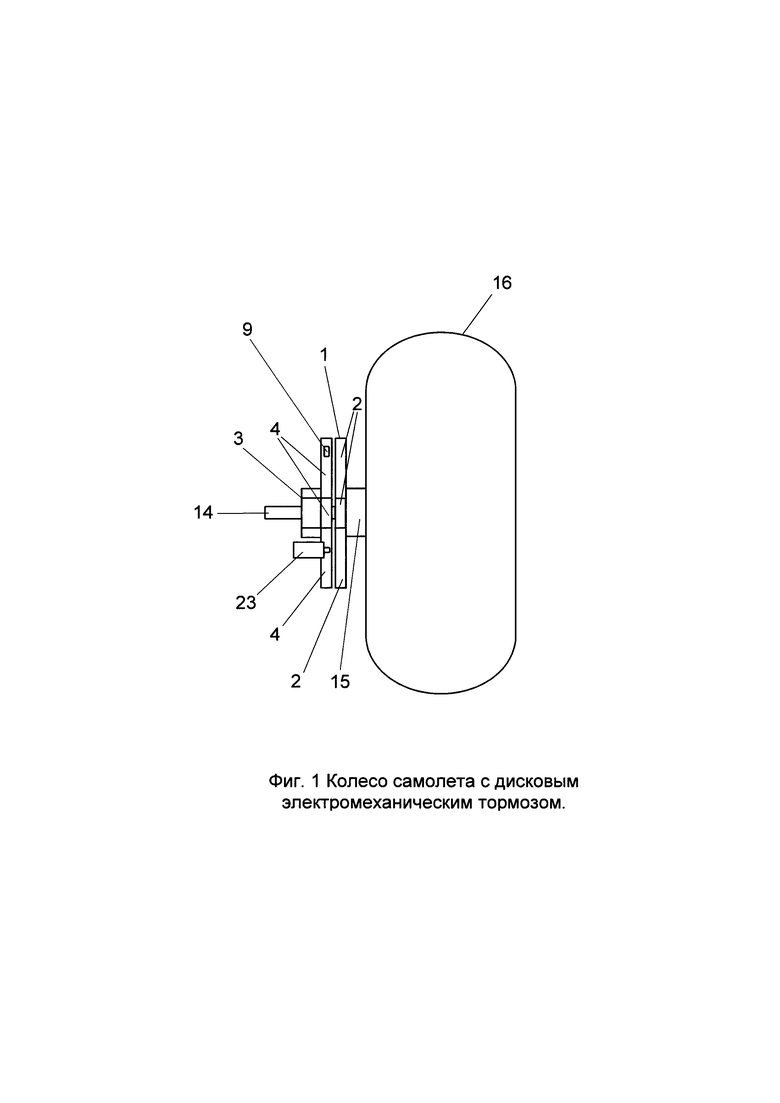
Фиг. 1 - колесо самолета с дисковым электромеханическим тормозом;
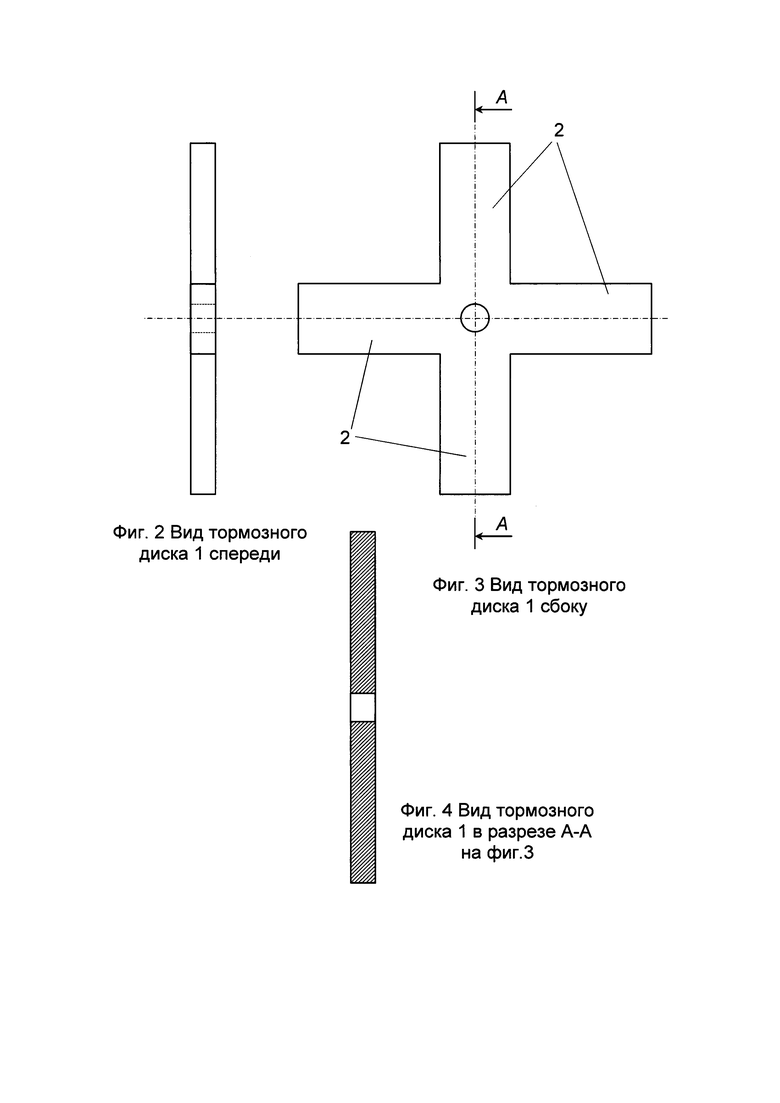
Фиг. 2 - вид тормозного диска 1 спереди;
Фиг. 3 - вид тормозного диска 1 сбоку;
Фиг. 4 - вид тормозного диска 1 в разрезе А-А на фиг. 3;
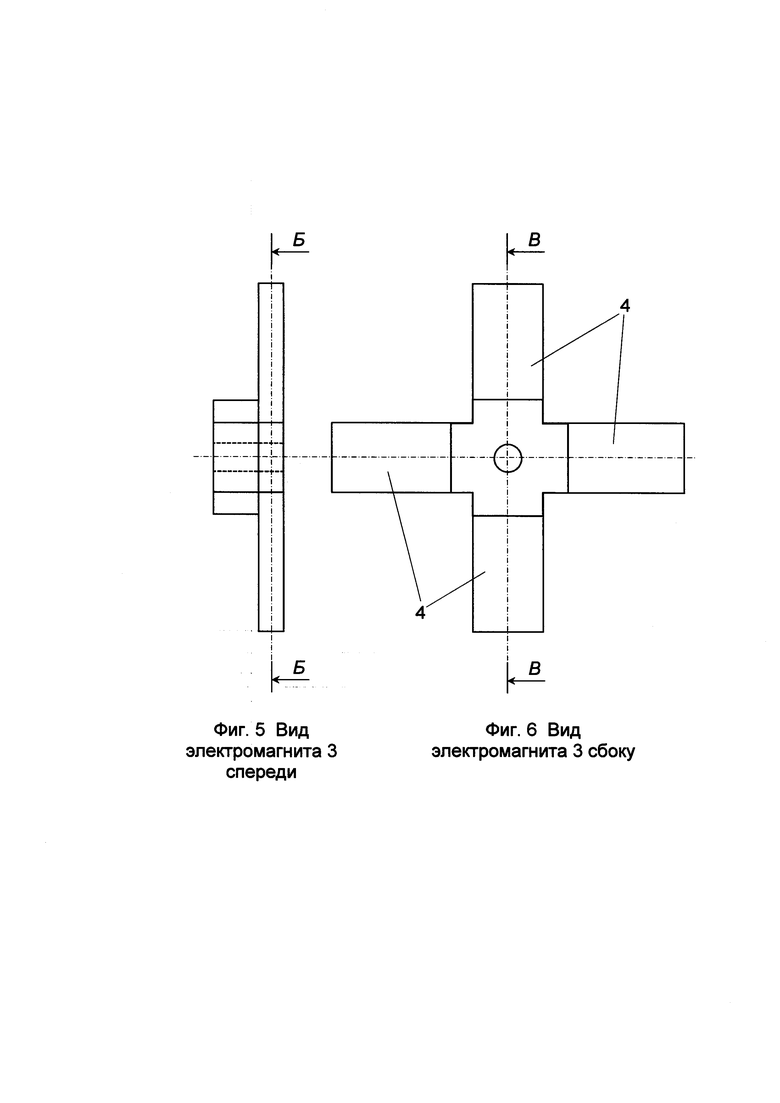
Фиг. 5 - вид электромагнита 3 спереди;
Фиг. 6 - вид электромагнита 3 сбоку;
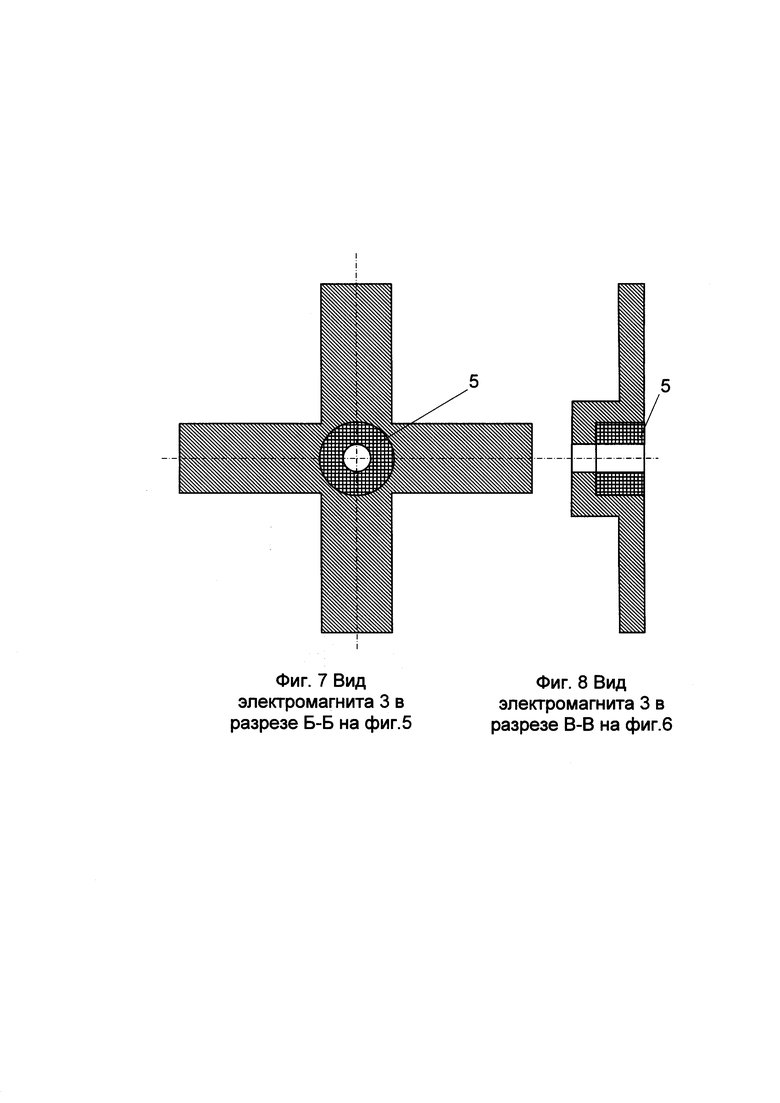
Фиг. 7 - вид электромагнита 3 в разрезе Б-Б на фиг. 5;
Фиг. 8 - вид электромагнита 3 в разрезе В-В на фиг. 6;
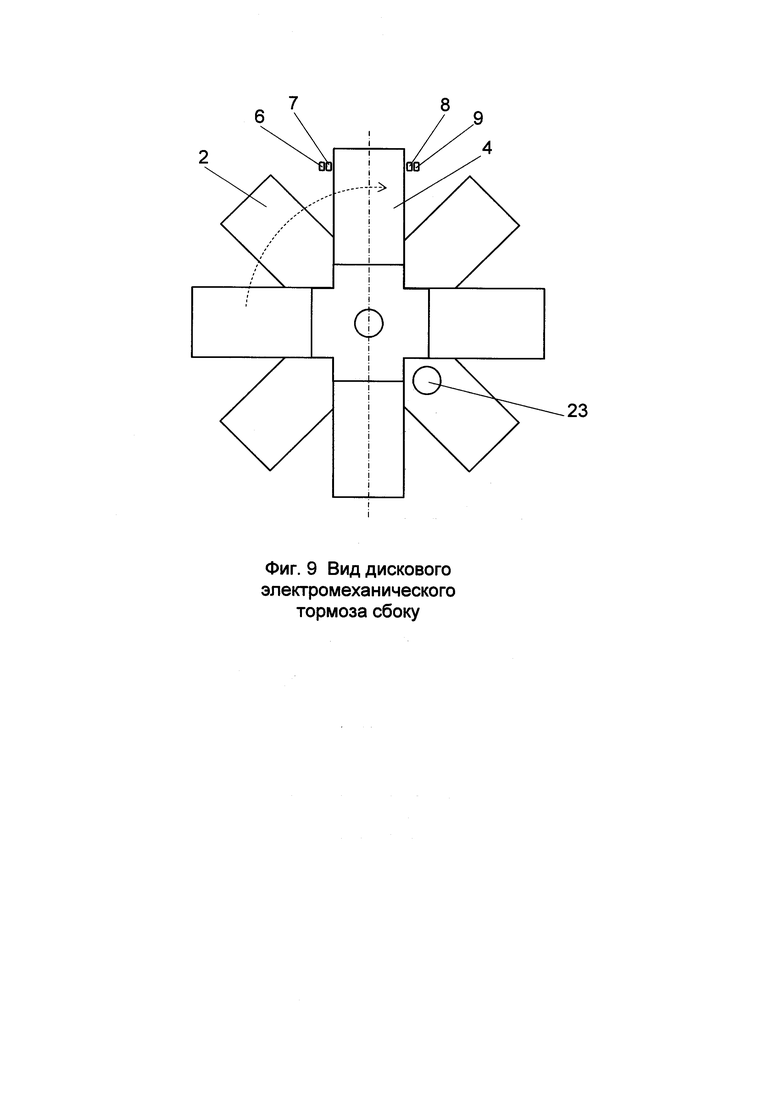
Фиг. 9 - вид дискового электромеханического тормоза самолета сбоку;
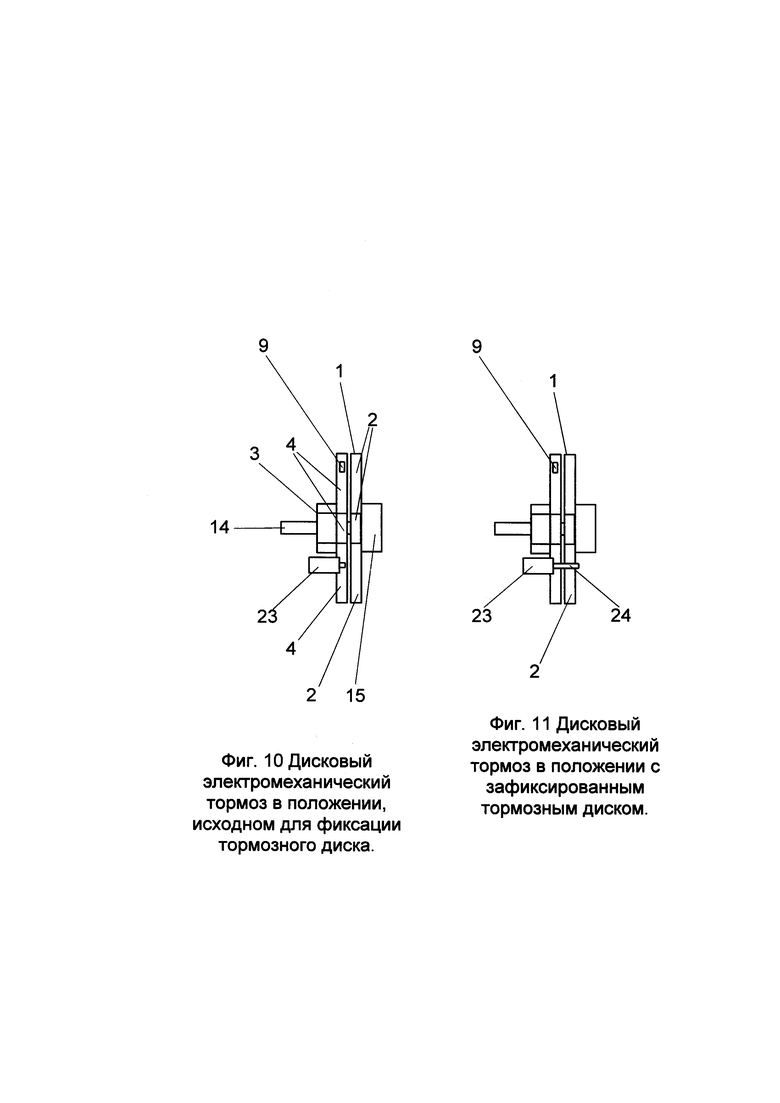
Фиг. 10 - дисковый электромеханический тормоз в положении, исходном для фиксации тормозного диска 1;
Фиг. 11 - дисковый электромеханический тормоз в положении, с зафиксированным тормозным диском 1;
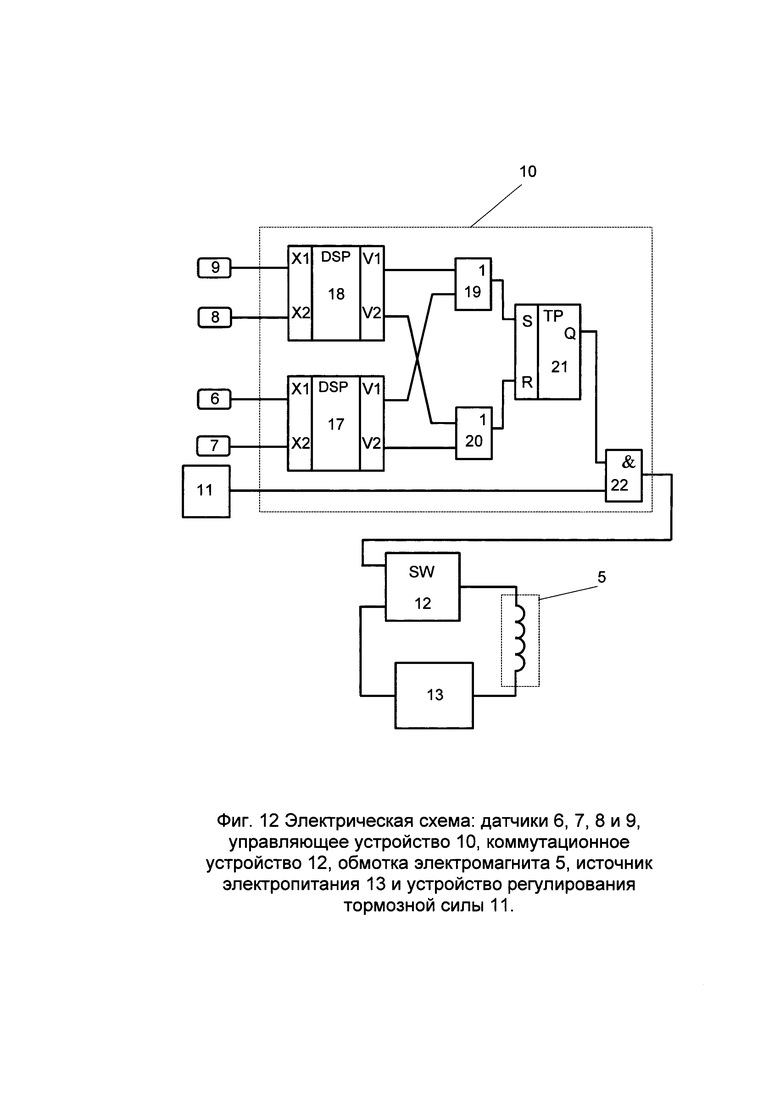
Фиг. 12 - электрическая схема: датчики 6, 7, 8 и 9, управляющее устройство 10, коммутационное устройство 12, обмотка электромагнита 5, источник электропитания 13 и устройство регулирования тормозной силы 11.
Перечень элементов на прилагаемых чертежах:
1 - тормозной диск;
2 - полюса тормозного диска;
3 - электромагнит;
4 - полюса электромагнита;
5 - обмотка электромагнита;
6, 7, 8, 9 - датчики положения полюсов тормозного диска;
10 - управляющее устройство;
11 - устройство регулирования тормозной силы;
12 - коммутационное устройство;
13 - источник электропитания;
14 - ось основной стойки шасси самолета;
15 - цапфа для крепления тормозного диска к колесу самолета;
16 - колесо самолета;
17 - цифровой сигнальный процессор (DSP);
18 - цифровой сигнальный процессор (DSP);
19 - элемент 2ИЛИ;
20 - элемент 2ИЛИ;
21 - триггер RS;
22 - элемент 2И;
23 - устройство фиксатора диска;
24 - штифт фиксатора диска.
Дисковый электромеханический тормоз самолета состоит из: тормозного диска 1 (см. фиг. 2, фиг. 3 и фиг. 4); электромагнита 3 аксиальной формы с ориентированными радиально полюсами 4 (см. фиг. 5, фиг. 6, фиг. 7 и фиг. 8), выполненными в плоскости, параллельной плоскости тормозного диска 1 и с минимальным рабочим воздушным зазором между полюсами электромагнита 4 и полюсами 2 тормозного диска. Тормозной диск 1 прикреплен посредством цапфы 15 к колесу самолета 16 (см фиг. 1).
На фиг. 9 представлен вид дискового электромеханического тормоза самолета сбоку. На фиг. 10 дисковый электромеханический тормоз в положении, исходном для фиксации тормозного диска 1. На фиг. 11 дисковый электромеханический тормоз в положении, с зафиксированным тормозным диском 1 посредством выдвинутого устройством фиксации 23 штифта 24 между полюсами 2 тормозного диска 1.
В случае, когда обмотка электромагнита 5 через коммутационное устройство 12 подключена к источнику электропитания 13 (см. фиг. 12), магнитное поле, создаваемое обмоткой 5 замыкается через полюса электромагнита 4, полюса тормозного диска 2, минимальные рабочие воздушные зазоры между ними, ось колеса, и минимальный воздушный зазор между осью 14 и тормозным диском 1. Тем самым магнитное поле создает силу, удерживающую тормозной диск 1.
На фиг. 12 изображена электрическая схема дискового электромеханического тормоза самолета: датчики 6, 7, 8 и 9, управляющее устройство 10, коммутационное устройство 12, обмотка электромагнита 5, источник электропитания 13 и устройство регулирования тормозной силы 11.
Дисковый электромеханический тормоз работает следующим образом.
Во время приземления при посадке колесо самолета 16 начинает вращаться с закрепленным на нем тормозным диском 1 (см. фиг. 1). При этом управляющее устройство 10 и коммутационное устройство 12 (см. фиг. 12) остаются постоянно включенными. Устройство фиксирования 23 не фиксирует штифтом 24 тормозной диск 1.
В процессе вращения тормозного диска 1 по часовой стрелке (см. фиг. 9) его полюса 2 периодически помещаются напротив датчиков 6, 7, 8 и 9 положения полюсов 2 тормозного диска 1.
В момент положения полюса 2 тормозного диска 1 напротив датчика 6 на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал с выхода датчика 6 поступает на вход Х1 цифрового сигнального процессора 17. Затем полюс 2, продолжая свое движение, занимает положение и напротив датчика 7, вследствие чего на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 17. Согласно алгоритму работы цифрового сигнального процессора 17, если вначале появляется сигнал логической единицы на его входе Х1, а затем появляется сигнал логической единицы на его на входе Х2, то в дальнейшем после перехода обоих сигналов до уровня напряжения близкого к нулю, что соответствует логическому нулю на этих входах сигнального процессора 17, на его выходе V1 формируется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 19, выполняющего логическую функцию 2ИЛИ. С выхода элемента 19 сигнал положительного уровня, соответствующий логической единице, поступает на вход S триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход элемента 22, выполняющего логическую функцию 2И. При необходимости включения режима торможения с выхода устройства регулирования тормозной силы 11 (см. фиг. 12) подается широтно-импульсный модулированный электрический сигнал положительной полярности, который поступает на другой вход элемента 22 управляющего устройства 10. В этом случае с выхода элемента 22 на вход коммутационного устройства 12 поступает широтно-импульсный модулированный электрический сигнал положительной полярности. В результате коммутационное устройство 12 подключает один конец обмотки электромагнита 5 к источнику электропитания 13, другой выход которого подсоединен непосредственно к другому концу обмотки электромагнита 5. В это время (см. фиг. 9) полюса 2 тормозного диска 1 занимают положение напротив полюсов 4 электромагнита 3 с минимальным рабочим воздушным зазором. Магнитное поле, создаваемое обмоткой 5 проходит по сердечнику электромагнита 3 через его полюса 4, через рабочий воздушный зазор, полюса 2 тормозного диска 1, через минимальный воздушный зазор и между осью 14 и закрепленным на ней тормозным диском 1 и замыкается на сердечник электромагнита 3. Тем самым магнитное поле удерживает тормозной диск 1, передающий тормозную силу колесу самолета 16. В результате движения колеса самолета 16 далее, преодолевая тормозной импульс, созданный магнитным полем, тормозной диск 1 продолжает вращаться и его полюса 2 начинают выходить из под полюсов 4 электромагнита 3. При этом полюс 2 вначале занимает положение напротив датчика 8, на выходе которого появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 18. Затем полюс 2, продолжая свое движение, занимает положение и напротив датчика 9, на выходе которого появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х1 цифрового сигнального процессора 18. Согласно алгоритму работы цифрового сигнального процессора 18, если вначале появляется сигнал положительного уровня, соответствующий логической единице, на его входе Х2, а затем сигнал положительного уровня, соответствующий логической единице, на входе Х1, то в дальнейшем, после перехода обоих сигналов до уровня напряжения близкого к нулю, что соответствует логическому нулю на этих входах сигнального процессора 18, на его выходе V2 формируется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 20, выполняющего логическую функцию 2ИЛИ. С выхода элемента 20 сигнал положительного уровня, соответствующий логической единице, поступает на вход R триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q сигнал положительного уровня напряжения, соответствующий логической единице, переходит до уровня напряжения близкого к нулю, что соответствует логическому нулю. Этот сигнал логического нуля поступает на вход элемента 22, выполняющего логическую функцию 2И. В результате с выхода элемента 22 на вход коммутационного устройства 12 больше не поступает широтно-импульсный модулированный электрический сигнал положительного уровня напряжения с устройства регулирования тормозной силы 11. Поэтому коммутационное устройство 12 отключает обмотку 5 от источника электропитания 13. При перемещении полюсов 2 тормозного диска 1 снова напротив полюсов 4 электромагнита 3 цикл работы процесса торможения повторяется.
Широтно-импульсный модулированный электрический сигнал с выхода устройства регулирования тормозной силы 11 осуществляет управление средним значением напряжения на нагрузке путем изменения скважности импульсов, управляющих коммутационным устройством 12 для регулирования тормозной силы, действующей на колесо самолета 16.
Этот режим продолжается до тех пор, пока при необходимости выключения режима торможения с выхода устройства 11 (см. фиг. 12) не прекратится подача электрического сигнал положительной полярности, который поступал на другой вход элемента 22 управляющего устройства 10. В этом случае с выхода элемента 22 на вход коммутационного устройства 12 уже не будет поступать электрический сигнал положительной полярности и торможение прекратится, так как обмотка 5 больше не будет подключаться к источнику питания 13.
При движении колеса самолета 16 и тормозного диска 1 против часовой стрелки (см. фиг. 9), дисковый электромеханический тормоз самолета работает следующим образом. В процессе вращения тормозного диска 1 (см. фиг. 9) против часовой стрелки его полюс 2 вначале занимают положение напротив датчика 9, вследствие чего на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал с выхода датчика 9 поступает на вход Х1 цифрового сигнального процессора 18. Затем полюс 2 занимает положение и напротив датчика 8, вследствие чего на его выходе появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 18. Согласно алгоритму работы цифрового сигнального процессора 18, если вначале появляется сигнал логической единицы на его входе Х1, а затем появляется сигнал логической единицы на его на входе Х2, то в дальнейшем после перехода обоих сигналов до уровня напряжения близкого к нулю, что соответствует логическому нулю на этих входах сигнального процессора 18, на его выходе V1 формируется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 19, выполняющего логическую функцию 2ИЛИ. С выхода элемента 19 сигнал положительного уровня, соответствующий логической единице, поступает на вход S триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход элемента 22, выполняющего логическую функцию 2И. При необходимости включения режима торможения с выхода устройства регулирования тормозной силы 11 (см. фиг. 11) подается широтно-импульсный модулированный электрический сигнал положительной полярности, соответствующий логической единице, который поступает на другой вход элемента 22 управляющего устройства 10. В этом случае с выхода элемента 22 на вход коммутационного устройства 12 поступает электрический сигнал положительной полярности. Коммутационное устройство 12 подключает обмотку 5 электромагнита к источнику электропитания 13. В это время полюса 2 тормозного диска 1 занимают положение напротив полюсов 4 электромагнита 3 (см. фиг. 1 и фиг. 10). Магнитное поле, создаваемое обмоткой 5 проходит по сердечнику электромагнита 3 через его полюса 4, через рабочий воздушный зазор, полюса 2 тормозного диска 1, через воздушный зазор между осью 14 и нее замыкается на сердечник электромагнита 3. Тем самым магнитное поле удерживает тормозной диск 1, передающий тормозное усилие на колесо самолета 16. В результате движения колесо самолета 16 далее, преодолев тормозной импульс, созданный магнитным полем, тормозной диск 1 продолжает вращаться и его полюса 2 начинают выходить из под полюсов 4 сердечника электромагнита 3. При этом полюс 2 вначале занимает положение напротив датчика 7, на выходе которого, появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х2 цифрового сигнального процессора 17. Затем полюс 2 занимает положение и напротив датчика 6, на выходе которого, появляется электрический сигнал положительного уровня, соответствующий логической единице. Этот сигнал поступает на вход Х1 цифрового сигнального процессора 17. Согласно алгоритму работы цифрового сигнального процессора 17, если вначале появляется сигнал положительного уровня, соответствующий логической единице, на его входе Х2, а затем сигнал положительного уровня, соответствующий логической единице, на входе Х1, то в дальнейшем, после перехода обоих сигналов до уровня напряжения близкого к нулю, что соответствует логическому нулю, на этих входах сигнального процессора 17, на его выходе V2 появляется прямоугольный электрический сигнал положительной полярности, соответствующий логической единице. Этот сигнал поступает на вход элемента 20, выполняющего логическую функцию 2ИЛИ. С выхода элемента 20 сигнал положительного уровня, соответствующий логической единице, поступает на вход R триггера 21, выполняющего логическую функцию триггера RS. При этом триггер 21 переходит в состояние, при котором на его выходе Q сигнал положительного уровня напряжения, соответствующий логической единице, переходит до уровня напряжения близкого к нулю, что соответствует логическому нулю. Этот сигнал логического нуля поступает на вход элемента 22, выполняющего логическую функцию 2И. В результате с выхода элемента 22 на вход коммутационного устройства 12 больше не поступает широтно-импульсный модулированный электрический сигнал положительного уровня и оно отключает обмотку 5 от источника электропитания 13. При дальнейшем перемещении полюсов 2 тормозного диска 1 напротив полюсов 4 электромагнита 3 цикл работы процесса торможения повторяется. Этот режим продолжается до тех пор, пока при необходимости выключения режима торможения с выхода устройства регулирования тормозной силы 11 (см. фиг. 12) не прекратится подача электрического сигнал положительной полярности, который поступал на другой вход элемента 22 управляющего устройства 10. В этом случае с выхода элемента 22 на вход коммутационного устройства 12 уже не будет поступать широтно-импульсный модулированный электрический сигнал положительной полярности и торможение прекратится, так как обмотка 5 больше не будет подключаться к источнику питания 13 через коммутационное устройство 12.
Устройство фиксатора диска 23 (см. фиг. 1 и см. фиг. 10) после полной остановки вращения тормозного диска 1 выдвигает штифт 24 фиксатора диска 24 в пространство между полюсами 2 тормозного диска 1 (см. фиг. 11) и тем самым предотвращает вращение тормозного диска 1. После этого дисковый электромеханический тормоз самолета может быть обесточен.
Изобретение относится к тормозным устройствам колес шасси самолета. Дисковый электромеханический тормоз самолета содержит тормозной диск, закрепленный на колесе шасси. На тормозном диске из магнитного материала выполнены полюса, ориентированные радиально в плоскости тормозного диска и перпендикулярно к оси вращения диска. На оси колеса основного шасси закреплен электромагнит аксиальной формы с ориентированными радиально полюсами, выполненными в плоскости, параллельной плоскости тормозного диска и с минимальным рабочим воздушным зазором между полюсами электромагнита и полюсами тормозного диска. По окружности рядом с расщепленными полюсами электромагнита размещены датчики положения полюсов тормозного диска, подключенные своими выходами к входам управляющего устройства. Управляющее устройство соединено своим выходом с входом коммутационного устройства. К другому входу управляющего устройства подключен выход устройства регулирования тормозной силы. Устройство фиксатора диска содержит штифт фиксатора диска и прикреплено к основной опоре шасси самолета. Достигается повышение надежности и износостойкости тормозов. 12 ил.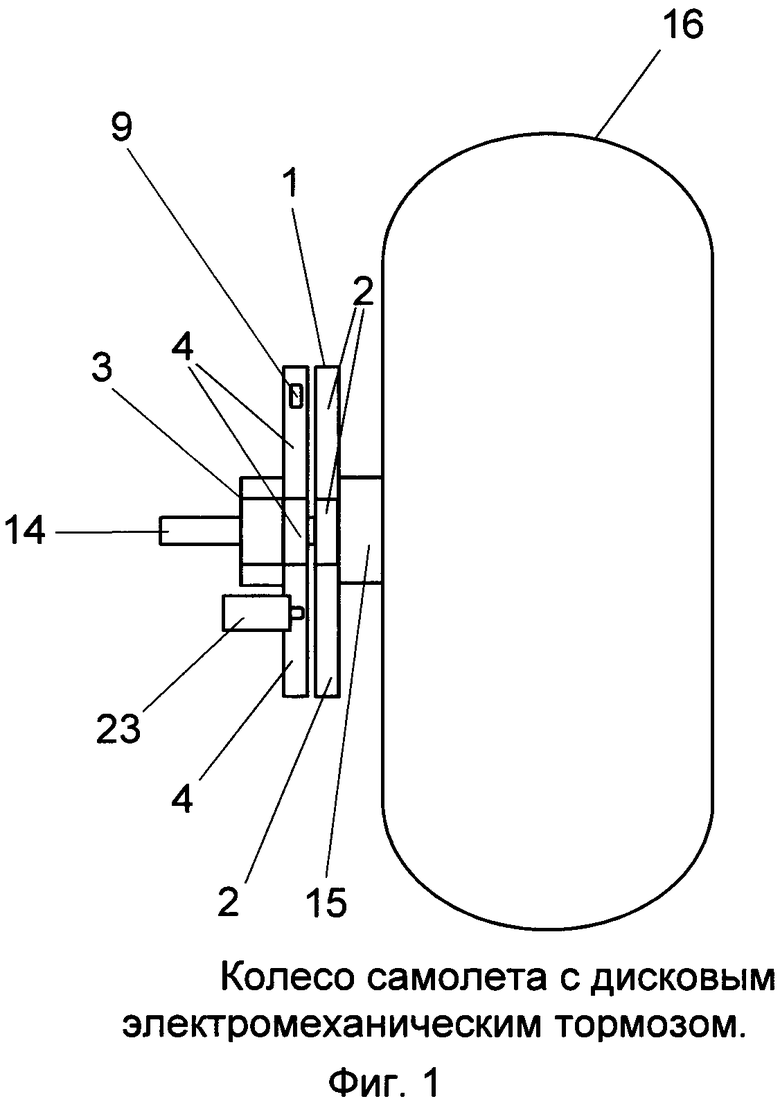
Дисковый электромеханический тормоз самолета, содержащий тормозной диск, закрепленный на колесе шасси, отличающийся тем, что на тормозном диске из магнитного материала выполнены полюса, ориентированные радиально в плоскости тормозного диска и перпендикулярно к оси вращения диска, на оси колеса основной опоры шасси закреплен электромагнит аксиальной формы с ориентированными радиально полюсами, выполненными в плоскости, параллельной плоскости тормозного диска и с минимальным рабочим воздушным зазором между полюсами электромагнита и полюсами тормозного диска, и по окружности рядом с полюсами электромагнита размещены датчики положения полюсов тормозного диска, подключенные своими выходами к входам управляющего устройства, соединенного своим выходом с входом коммутационного устройства, которое подключает обмотку электромагнита к источнику электропитания, к другому входу управляющего устройства подключен выход устройства регулирования тормозной силы, устройство фиксатора диска, содержащее штифт фиксатора диска, прикреплено к оси колеса основной опоры шасси самолета рядом с тормозным диском.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТОРМОЖЕНИЯ И МАНЕВРИРОВАНИЯ | 2004 |
|
RU2403180C2 |
| ДИСКОВЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТОРМОЗ | 2011 |
|
RU2452636C1 |
| СПОСОБ ОТЛИВКИ ЦЕПЕЙ В ПЕСЧАНЫХ ФОРМАХ | 1998 |
|
RU2123903C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ САМОЛЕТА | 1994 |
|
RU2102283C1 |

