Изобретение относится к контрольно-измерительной технике и предназначено для измерения пространственного положения объекта посредством дистанционного измерения координат контрольных меток, закрепленных на нем. При этом изобретение позволяет проводить мониторинг состояния техногенных конструкций и, следовательно, предупреждать возникновение техногенных катастроф. Изобретение может быть использовано для предотвращения разрушения плотин, мостов, строительных конструкций (фундаментов зданий, кровли и т.д.), туннелей, а также предупреждения железнодорожных катастроф, аварий на шахтах, авиакатастроф и др.
Наиболее близким по технической сущности к заявляемому изобретению является способ измерения пространственного положения объекта при помощи геодезического измерительного устройства (US 2010/0119161 A1 G06K 9/68; G01C 15/00 от 13.05.2010).
Данный способ измерения заключается в следующем. В контролируемых точках объекта закрепляют не менее трех контрольных меток, излучение от которых формирует распределение облученности в плоскости изображения фотоприемного устройства. По полученным изображениям определяют координаты контрольных меток в приборной системе координат. Далее находят не менее двух общих меток между измеренными контрольными метками и опорными метками, положение которых известно во внешней системе координат. По положению общих меток определяют положение приборной системы координат во внешней системе, а пространственное положение объекта определяют по координатам контрольных меток, пересчитанным из приборной системы координат во внешнюю систему координат.
Недостатками рассмотренного способа являются отсутствие измерения рефракционной составляющей погрешности измерения, что при наличии градиента температуры вдоль трассы измерения может существенно снизить точность измерения;
трудоемкость поиска опорных меток среди множества контрольных, что при значительном количестве меток значительно снижает быстродействие; а также низкая автоматизация измерений.
Из уровня техники известно устройство для измерения пространственного положения объекта, описанный в патенте WO 01/88470 A1, G01B 11/00 от 22.11.2001, которое по совокупности признаков является наиболее близким к заявляемому изобретению и может быть принято за прототип. Данное устройство включает не менее одной контрольной метки, выполненной в виде не менее одного точечного излучателя, размещаемого на контролируемом объекте, фотоприемное устройство, оптически сопряженное с контрольной меткой, содержащее оптическую систему, в фокальной плоскости которой расположен фотоприемник, выход которого соединен с входом блока обработки, и блок управления метками, вход которого соединен с первым выходом блока обработки.
Основным недостатком указанного устройства является отсутствие у него возможности измерения рефракционной составляющей погрешности измерения:
Поэтому задачей настоящего изобретения является разработка нового способа измерения пространственного положения объекта и устройства для его осуществления, который бы обеспечивал достижение следующего технического результата, а именно повышение точности измерения.
Решение поставленной задачи с достижением указанного технического результата заключается в том, что в способе измерения пространственного положения объекта, заключающемся в том, в контролируемых точках объекта закрепляют контрольные метки, излучение от которых формирует распределение облученности в плоскости изображения фотоприемного устройства, фиксируя полученное распределение в одном из спектральных диапазонов, получают изображение, по которому определяют координаты пространственного положения контрольных меток в приборной системе координат (ПСК), отыскивая среди координат контрольных меток координаты тех точек, положение которых известно во внешней системе координат, определяют положение приборной системы координат относительно внешней системы, а пространственное положение объекта определяют по координатам контрольных меток, пересчитанным из приборной системы координат во внешнюю систему координат, новым является то, что дополнительно фиксируют распределение облученности в спектральном диапазоне, отличном от первого, сравнивая координаты центров распределений облученности в каждом из двух спектральных диапазонов для не менее, чем одной метки определяют значение рефракционной погрешности:


где n(λ), n(λ1), n(λ2) - показатели преломления воздушного тракта на длине волны измерения и в выбранных спектральных диапазонах соответственно, (x(λ1),y(λ1)), (x(λ2),y(λ2)) - координаты центра распределения облученности в изображении метки в выбранных спектральных диапазонах, М - коэффициент пересчета координат из пространства изображений в пространство предметов, из полученных значений координат пространственного положения контрольных меток в приборной системе координат вычитают значение рефракционной погрешности.
Возможен вариант, развитие основного технического решения которого заключается в том, что в способе измерения пространственного положения дополнительно фиксируют распределение фоновой облученности, не содержащее облученности от контрольных меток, сравнивая которое с полученным ранее в том же спектральном диапазоне распределением облученности, выявляют различающиеся области, которые принимают за изображения меток, по которым определяют координаты пространственного положения контрольных меток в приборной системе координат.
В устройстве измерения пространственного положения объекта, включающем не менее одной контрольной метки, выполненной в виде не менее одного точечного излучателя, размещаемого на контролируемом объекте, фотоприемное устройство, оптически сопряженное с контрольной меткой, содержащее оптическую систему, в фокальной плоскости которой расположен фотоприемник, выход которого соединен с входом блока обработки, и блок управления метками, вход которого соединен с первым выходом блока обработки, новым является то, что по крайней мере один точечный излучатель одной контрольной метки выполнен в виде излучателя белого цвета, а фотоприемное устройство содержит не менее одного фотоприемника, выполненного в виде матричного приемника оптического излучения, на каждый пространственный элемент которого нанесен светофильтр одного из по крайней мере двух различных спектральных диапазонов.
Заявителем проведен патентный поиск по данной теме и заявляемая совокупность существенных признаков не выявлена. Поэтому предлагаемое изобретение можно признать новым.
Сущность изобретения поясняется чертежами.
На фиг 1 приведена структурная схема заявляемого устройства.
1 - контрольная метка (КМ)
2 - фотоприемное устройство (ФУ)
3 - оптическая система (ОС)
4 - фотоприемник (ФП)
5 - светофильтр (СФ)
6 - блок обработки (БО)
7 - блок управления метками (БУМ)
Устройство содержит активные контрольные метки 1, жестко закрепленные в контролируемых точках объекта. Каждая контрольная метка 1, содержит не менее одного точечного излучателя, и оптически сопряжена с фотоприемным устройством 2, состоящим из оптической системы 3, в фокальной плоскости которой расположен фотоприемник 4, на каждый пространственный элемент которого нанесен светофильтр 5 одного из, по крайней мере, двух различных спектральных диапазонов. Например, может быть использован цветной матричный фотоприемник, порядок следования светофильтров которого выполнен по схеме Байера. Выход фотоприемника 4 соединен с первым входом блока обработки 6, первый выход которого подключен ко входу блока управления метками 7, задающим режим работы контрольных меток 1, а другой выход предназначен для подключения ко внешнему устройству, например, к устройству сигнализации или к серверу, осуществляющему сбор информации о состоянии объекта с датчиков различных типов.
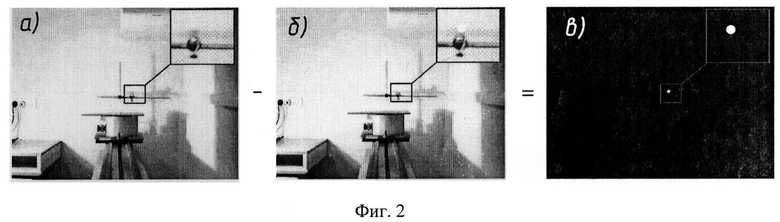
На фиг.2 показан принцип борьбы с помехами при помощи межкадровой разности, где a - изображение, содержащее только фоновую облученность, б - изображение, содержащее также и облученность от контрольной метки, в - результирующее изображение, содержащее только изображение контрольной метки.
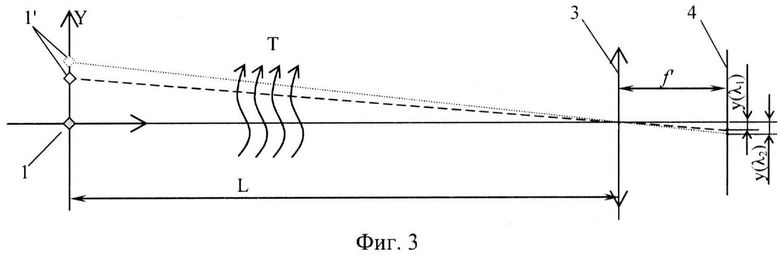
На фиг.3 представлен принцип измерения рефракционной составляющей погрешности. Светофильтры 5, блок обработки 6 и блок управления метками 7 не показаны.
Излучение от точечного излучателя контрольной метки 1, проходя по оптической трассе длиной L, в результате наличия градиента температуры T подвергается воздействию рефракции. Поскольку излучение разных длин волн отклоняется в результате действия рефракции по-разному, то в плоскости расположения фотоприемника 4, расположенной на расстоянии f' от оптической системы, каждый спектральный канал образует собственное изображение излучателя контрольной метки 1. Если действие рефракции не учитывать, то пересчет координат излучателя контрольной метки 1 из пространства предметов в пространство изображений приведет к ошибочным результатам - 1'. При этом величина ошибки для каждого спектрального канала будет своя. Однако измерив отклонения изображения для двух спектральных каналах у(λ1) и у(λ2), можно рассчитать величину возникающей в данных условиях погрешности для требуемой длины волны и внести соответствующую поправку в измерения.
Способ измерения пространственного положения объекта и устройство для его осуществления работают следующим образом.
В контрольных точках объекта закрепляют не менее трех контрольных меток 1, каждая из которых содержит не менее одного точечного излучателя, оптически сопряженного с фото приемным устройством 2. Наличие нескольких излучателей в составе контрольной метки 1 позволяет вычислять координату дальности до объекта измерения без использования дальномерных каналов, а также увеличить помехозащищенность устройства, поскольку такое исполнение контрольной метки 1 привносит дополнительную информацию, что позволяет использовать специальные алгоритмы распознавания. Не менее двух контрольных меток 1 закрепляют в точках, координаты которых априорно известны во внешней системе координат (например, проектная система координат здания). Данные контрольные метки являются опорными. Для увеличения точности определения взаимного положения приборной и внешней систем координат опорные метки, устанавливают в точках, разнесенных на максимальное расстояние в пределах поля зрения фотоприемного устройства 2.
Поскольку контрольные метки 1 оптически сопряжены с фотоприемным устройством 2, то их излучение, проходя через оптическую систему 3 формирует распределение облученности в плоскости изображения фотоприемного устройства 2, в которой установлен фотоприемник 4, выполненный в виде матричного приемника оптического излучения, на каждый пространственный элемент которого нанесен светофильтр 5 красного, синего или зеленого областей спектра. По сигналу от блока обработки 6 фотоприемное устройство 2 фиксирует сформированное распределение облученности. Блок обработки 6 последовательно формирует два сигнала фиксации кадра. Первый - в момент, когда все контрольные метки 1, расположенные в поле зрения фотоприемного устройства 2, выключены. Таким образом, фотоприемное устройство 2 фиксирует изображение, содержащее только фоновую облученность. Второй - в момент, когда все контрольные метки 1 в поле зрения фотоприемного устройства 2 включены. Таким образом, второе изображение содержит помимо той же фоновой облученности, также и облученность от контрольных меток 1. Поскольку фотоприемник 4 выполнен в виде цветной матрицы, то при фиксации им распределения облученности, получают три изображения в разных спектральных диапазонах (красный, синий и зеленый). Одно из таких изображений (например, в красном диапазоне) используют для борьбы с помехами при помощи межкадровой разности (фиг.2), а другое (в синем или зеленом диапазоне) - для расчета рефракционной составляющей погрешности. Зафиксированные изображения сохраняются в памяти блока обработки 6. Включение и выключение контрольных меток 1 производится блоком управления метками 7 по команде от блока обработки 6. Кроме того, наличие связи блок обработки 6 - блок управления метками 7 позволяет настраивать яркость свечения источников контрольной метки 1, тем самым увеличивая их видимость на фоне окружающей обстановки.
Борьба с помехами при помощи межкадровой разности производится следующим образом (фиг.2). Блок обработки 6 производит сравнение двух изображений, сохраненных в памяти - одно изображение, полученное по первой команде от блока обработки 6 (содержит только фоновую облученность (фиг.2,а), например, в красном канале, а второе изображение, полученные в том же спектральном диапазоне, но по второй команде от блока обработки 6 (содержит облученность и от контрольных меток 1 (фиг.2,б). В блоке обработки 6 производят поэлементное вычитание одного изображения из другого, тем самым оставляя на результирующем изображении (фиг.2,в) только различающиеся области, представляющие собой с большой долей вероятности именно изображения контрольных меток 1. Далее по координатам центров изображений контрольных меток 1 определяют координаты пространственного положения контрольных меток в приборной системе координат.
После этого на одном из изображений, полученных по второй команде от блока обработки 6, но в другом спектральном диапазоне (например, в синем канале), также находят координаты центров контрольных меток 1. Их нахождение сложности не представляет, поскольку изображения контрольных меток 1, найденные раннее в другом спектральном канале, расположены в той же пространственной области. Для не менее, чем одной контрольной метки 1 в блоке обработки 6 вычисляют разницу координат между центрами ее изображений в каждом из двух спектральных диапазонов (фиг.3). По рассчитанной разнице определяют значение рефракционной составляющей погрешности по выражениям:


где n(λ), n(λ1), n(λ2) - показатели преломления воздушного тракта на длине волны измерения и в выбранных спектральных диапазонах соответственно, (x(λ1),y(λ1)), (x(λ2),y(λ2)) - координаты центра распределения облученности в изображении контрольной метки 1 в выбранных спектральных диапазонах, M - коэффициент пересчета координат из пространства изображений в пространство предметов.
Поскольку для расчета рефракционной составляющей погрешности необходимо, чтобы излучение контрольной метки 1 было видимым в разных спектральных интервалах, то, по крайней мере, один излучатель одной контрольной метки 1 выполняется в виде излучателя белого цвета.
Найденное значение рефракционной составляющей погрешности вычитают из полученных ранее значений координат пространственного положения контрольных меток 1 в приборной системе координат. После чего находят не менее двух общих меток 1 между измеренными контрольными метками и опорными метками. По положению общих меток 1 определяют положение приборной системы координат во внешней системе, а пространственное положение объекта определяют по координатам контрольных меток 1, пересчитанным из приборной системы координат во внешнюю систему координат. При этом в случае закрепления опорных меток на стабильных неподверженных деформациям элементах конструкции контролируемого объекта, а остальных контрольных меток в критических точках конструкции, оказывается возможным непрерывно измерять степень деформации объекта, вычисляя разницу между номинальным и текущим положением контрольных меток, либо контролируя нарастание разницы между опорными и остальными метками во времени. В случае, если значение разницы превышает заданную величину, выносится предупреждение об опасности возникновения техногенной катастрофы. Текущее положение контрольных меток отслеживают в реальном масштабе времени, что позволяет оперативно реагировать на угрозу возникновения катастрофы.
Устройство может содержать как несколько фотоприемных устройств 2, подключенных к общему блоку обработки 6, так и несколько фотопримников 4 с нанесенными на них светофильтрами 5 в пределах одного фотоприемного устройства 2. Наличие нескольких фотоприемников 4 позволяет применить возможность параллельной обработки изображения, т.е. осуществлять распределенные вычисления, а также расширить эффективное поле зрение каждого из фотоприемных устройств 2. Наличие нескольких фотоприемных устройств 2 позволяет работать в распределенном поле зрения, за счет чего проводить всесторонний обмер достаточно протяженных объектов. Располагать фотоприемные устройства 2 следует таким образом, чтобы их совокупное поле зрения охватывало все контрольные метки 1, при этом в поле зрения каждого фотоприемного устройства 2 должно попадать не менее двух опорных меток для однозначной «стыковки» приборных систем координат всех фотоприемных устройств 2.
При использовании для измерений нескольких фотоприемных устройств 2, каждое из них дополнительно содержит блок предобработки, первый вход которого соединен с фотоприемником 4, второй вход - со вторым выходом блока обработки 6, а выход - с первым входом блока обработки 6
Следует отметить, что заявляемое устройство не требует поочередного измерения положения контрольных меток 1. Здесь происходит одновременная фиксация положений всех контрольных меток 1 без перемещения фотоприемного устройства 2, что позволяет исключить погрешность измерения, связанную с механическими перемещениями устройства, тем самым повысив точность его работы.
Пример конкретного исполнения
В качестве излучателей в опорных контрольных метках 1 используется полупроводниковый излучающий диод (ПИД) белого цвета: GNL-5013RGBW-C(C.C.) Излучатели остальных контрольных меток 1 выполнены в виде инфракрасных ПИД, работающих на длине волны 880 нм. Каждая контрольная метка 1 содержит два ПИД, закрепленных на плоском держателе, имеющем необходимые крепления для удержания его на контролируемом объекте. Блок управления метками 7 выполнен единой платой с размещенным на ней микроконтроллером и несколькими каналами управления метками 7, каждый из которых состоит из инвертора и усилителя, выполняющих широтно-импульсную модуляцию. Количество каналов соответствует общему числу ПИД.
В данном случае за координату центра распределения облученности в изображении метки 1 в выбранном спектральном диапазоне принимают координату центра отрезка, соединяющего энергетические центры изображений излучателей контрольной метки 1 по выражениям:
где (xk1(λ),yk1(λ)), (xk2(λ),yk2(λ)) - координаты энергетических центров изображений первого и второго излучателя контрольной метки 1 соответственно.
Следует отметить, что в случае использование бидиодной контрольной метки 1 в выражениях:


масштабный коэффициент М вычисляют по выражению:
где В - длина базового отрезка в пространстве предметов, измеренная априорно с большой точностью.
Отсюда видно, что в данном случае масштабный коэффициент вычисляется автоматически без включения в состав устройства дополнительных дальномерных каналов.
Каждое фотоприемное устройство 2 выполнено единым блоком в виде видеокамеры, оптическая система 3 которой представляет собой объектив с фокусным расстоянием 50 мм и угловым полем 29°, фотоприемник 4 выполнен в виде цветной ПЗС-матрицы формата 1/2,5 дюйма с размером пиксела 2,2 мкм×2,2 мкм с 2592(H)×l944(V) числом активным элементов, а блок предобработки представляет собой плату с микроконтроллером. Цветочувствительность матрицы обеспечивается нанесением на фоточувствительную поверхность фильтра Байера. Алгоритм межкадровой разности применяется в красном спектральном канале, а в качестве второго спектрального канала для измерения рефракционной составляющей погрешности используют синий канал.
Блок обработки 6 выполнен единым блоком с блоком управления метками 7 в виде электронной вычислительной машины, при этом управление контрольными метками 1 осуществляется по радиоканалу, а связь между блоком предобработки и блоком обработки 6 осуществляется по Ethernet интерфейсу.
Таким образом, заявляемая совокупность признаков обеспечивает повышение точности измерения пространственного положения объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ установки заданной облученности от МЧТ | 2018 |
|
RU2679307C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524450C1 |
| СПОСОБ И УСТРОЙСТВО АЗИМУТАЛЬНО-УГЛОМЕСТНОЙ ИНДИКАЦИИ В ОПТИКО-ЛОКАЦИОННЫХ СИСТЕМАХ | 2015 |
|
RU2628301C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2424932C1 |
| Устройство для контроля деформаций поверхности конструкций и сооружений большой площади | 2017 |
|
RU2658110C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ ГАЗОВОЙ СРЕДЫ | 1999 |
|
RU2167408C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ ГАЗОВОЙ СРЕДЫ | 1999 |
|
RU2167409C2 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270523C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2456542C2 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
Изобретение позволяет проводить мониторинг состояния техногенных конструкций для предотвращения их разрушения. При реализации способа в контролируемых точках объекта закрепляют контрольные метки, излучение от которых формирует распределение облученности в плоскости изображения фотоприемного устройства. По полученному изображению в одном из спектральных диапазонов определяют координаты контрольных меток в приборной системе координат (ПСК). Определяют положение ПСК относительно внешней системы. Пространственное положение объекта определяют по координатам контрольных меток, пересчитанным из ПСК во внешнюю систему координат. Дополнительно фиксируют распределение облученности в спектральном диапазоне, отличном от первого. Сравнивают координаты центров распределений облученности в каждом из двух спектральных диапазонов. Определяют значение рефракционной погрешности и из полученных значений координат контрольных меток в ПСК вычитают значение рефракционной погрешности. В устройстве по крайней мере один точечный излучатель одной контрольной метки выполнен в виде излучателя белого цвета. Фотоприемное устройство содержит не менее одного фотоприемника, выполненного в виде матричного приемника оптического излучения, на каждый пространственный элемент которого нанесен светофильтр одного из по крайней мере двух различных спектральных диапазонов. Технический результат - повышение точности измерения. 2 н. и 1 з.п. ф-лы, 3 ил.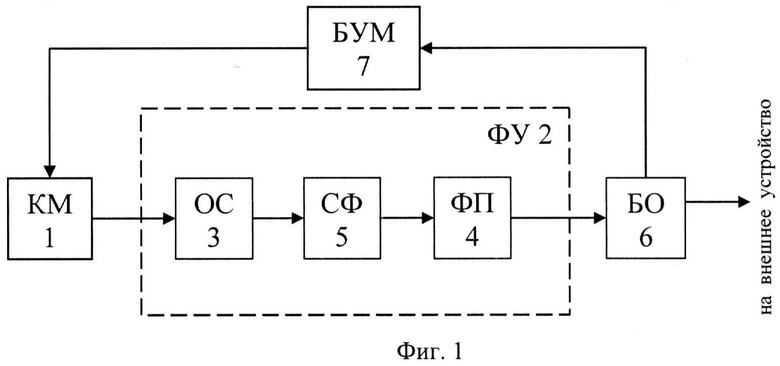
1. Способ измерения пространственного положения объекта, заключающийся в том, что в контролируемых точках объекта закрепляют контрольные метки, излучение от которых формирует распределение облученности в плоскости изображения фотоприемного устройства, фиксируя полученное распределение в одном из спектральных диапазонов, получают изображение, по которому определяют координаты пространственного положения контрольных меток в приборной системе координат (ПСК), определяя среди координат контрольных меток координаты тех точек, положение которых известно во внешней системе координат, определяют положение ПСК относительно внешней системы, а пространственное положение объекта определяют по координатам контрольных меток, пересчитанным из ПСК во внешнюю систему координат, отличающийся тем, что дополнительно фиксируют распределение облученности в спектральном диапазоне, отличном от первого, сравнивая координаты центров распределений облученности в каждом из двух спектральных диапазонов для не менее, чем одной метки, определяют значение рефракционной погрешности:


где n(λ), n(λ1), n(λ2) - показатели преломления воздушного тракта на длине волны измерения и в выбранных спектральных диапазонах соответственно;
(x(λ1),y(λ1)), (x(λ2),y(λ2)) - координаты центра распределения облученности в изображении метки в выбранных спектральных диапазонах;
M - коэффициент пересчета координат из пространства изображений в пространство предметов;
из полученных значений координат пространственного положения контрольных меток в приборной системе координат вычитают значение рефракционной погрешности.
2. Способ по п.1, отличающийся тем, что дополнительно фиксируют распределение фоновой облученности, не содержащее облученности от контрольных меток, сравнивая которое с полученным ранее в том же спектральном диапазоне распределением облученности, выявляют различающиеся области, которые принимают за изображения меток, по которым определяют координаты пространственного положения контрольных меток в ПСК.
3. Устройство измерения пространственного положения объекта, включающее не менее одной контрольной метки, выполненной в виде не менее одного точечного излучателя, размещаемого на контролируемом объекте, фотоприемное устройство, оптически сопряженное с контрольной меткой, содержащее оптическую систему, в фокальной плоскости которой расположен фотоприемник, выход которого соединен с входом блока обработки, и блок управления метками, вход которого соединен с первым выходом блока обработки, отличающееся тем, что по крайней мере один точечный излучатель одной контрольной метки выполнен в виде излучателя белого цвета, а фотоприемное устройство содержит не менее одного фотоприемника, выполненного в виде матричного приемника оптического излучения, на каждый пространственный элемент которого нанесен светофильтр одного из по крайней мере двух различных спектральных диапазонов.
| US 2010119161 A1, 13.05.2010 | |||
| УСТРОЙСТВО ДЛЯ ФОРМОВКИ СПИРАЛЕШОВНЫХ ТРУБИЗ ЛЕНТЫ | 0 |
|
SU188470A1 |
| JP 2004361222 A, 24.12.2004 | |||
| US 2005128452 A1, 16.06.2005 | |||
| Способ контроля профиля криволинейных поверхностей | 1984 |
|
SU1254292A1 |
| JP 2007051910 A, 01.03.2007. | |||

