Способ измерения расстояния между объектами относится к контрольно-измерительной технике, в частности к способам контроля взаимного положения объектов (или отдельных частей одного объекта) оптико-электронными методами, и может быть использован для контроля взаимного положения объектов в пространстве, для линейного контроля взаимного положения элементов крупногабаритных сооружений, соосных деталей (например, турбоагрегатов АЭС, направляющих крупногабаритных станков и т.п.), а также может быть использован в автоматизированных системах в процессе синхронизации выполнения технологических операций исполнительными звеньями механизмов.
Известен способ определения координат объекта (патент РФ №2251712 в Бюл. №13 от 10.05.2005), суть которого заключается в определении угловой координаты изображения объекта вместе с изменяющими образ элементами в поле зрения и последующем пересчете полученной величины в стабилизированную систему координат, определении величины и направления линейной скорости объекта в стабилизированной системе координат, формировании величины углового смещения в стабилизированной картинной плоскости исходя из полученной величины и координат, характеризующих линейное смещение изменяющих образ элементов относительно собственной системы координат объекта, и корректировке угловой координаты изображения объекта вместе с искажающими образ элементами в стабилизированной системе координат на величину углового смещения.
Недостатком этого способа является сложность реализации и, в следствие этого, низкое быстродействие, невысокая точность в случае наличия различного рода искажений (например, дефектов матрицы вследствие деградации или больших колебаний температуры и т.п.).
Известен способ определения взаимного положения объектов (патент РФ №2468383 в Бюл. №33 от 27.11.2012), который относится к оптическим способам определения взаимного положения и взаимной ориентации объектов. Он состоит в создании измерительной системы, состоящей из установленного на первом объекте комплекта оптических реперов, в который входят не менее трех реперных оптических излучателей, и из установленного на другом объекте оптического измерительного комплекта. Мощность излучения каждого реперного оптического излучателя модулируют на отличной от других частоте повторения, периодически вырабатывая одновременно на всех частотах временные метки. С помощью оптического измерительного комплекта определяют углы визирования каждого реперного оптического излучателя и разности между расстоянием до произвольно выбранного реперного оптического излучателя и расстояниями до остальных реперных оптических излучателей и по этим данным вычисляют параметры взаимного положения объектов.
Недостатком этого способа является сложность реализации, невысокая точность, когда в тракте преобразования возникают различного рода помехи (например, изменения характеристик излучателя, приемников и фоновых засветок и т.п.).
Наиболее близким по технической сущности к заявленному объекту является способ измерения линейного смещения объекта, который включает формирование облученности в виде квазиточечных пятен рассеяния в плоскости изображения двух излучателей, преобразование оптического сигнала в электрический, измерение координат пятен рассеяния и определение величины смещения. Оптический сигнал в электрический преобразуют посредством ПЗС матрицы, центр которой назначается программно. По значениям координат энергетических центров тяжести первого и второго пятен рассеяния определяют координаты середины отрезка между ними по формулам:
где х′, y′ - координаты центра отрезка между пятнами рассеяния;
x1, х2 - горизонтальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно;
у1, у2 - вертикальные координаты энергетических центров тяжести первого и второго пятен рассеяния соответственно.
Недостатком этого способа является невысокая точность в случае наличия различного рода искажений изображений и помех (например, изменения характеристик излучателя, приемников и фоновых засветок и т.п.), сложность реализации и вследствие этого низкое быстродействие.
Задачей заявляемого изобретения является создание способа измерения расстояния между объектами.
Это достигается путем того, что измерение расстояний между объектами оптическим способом, протяженность которых на изображении соизмерима с расстояниями между ними, оценивается как совокупность нескольких характеристик положения одного пятна по отношению к другому.
Суть изобретения заключается в том, что оценку положения изображений объектов в кадре проводят по параметру, который является интегральной характеристикой нескольких значимых признаков положения их, при этом значимость каждого признака определяется соответствующими коэффициентами влияния.
Технический результат заключается в обеспечении снижения требований к качеству исполнения отдельных узлов системы, реализующей предложенный способ, универсализации работы устройства, снижении требований к точности установки частей системы и упрощении настройки и эксплуатации.
Возможность осуществления изобретения подтверждается тем, что авторами проведено полунатурное моделирование процессов измерения.
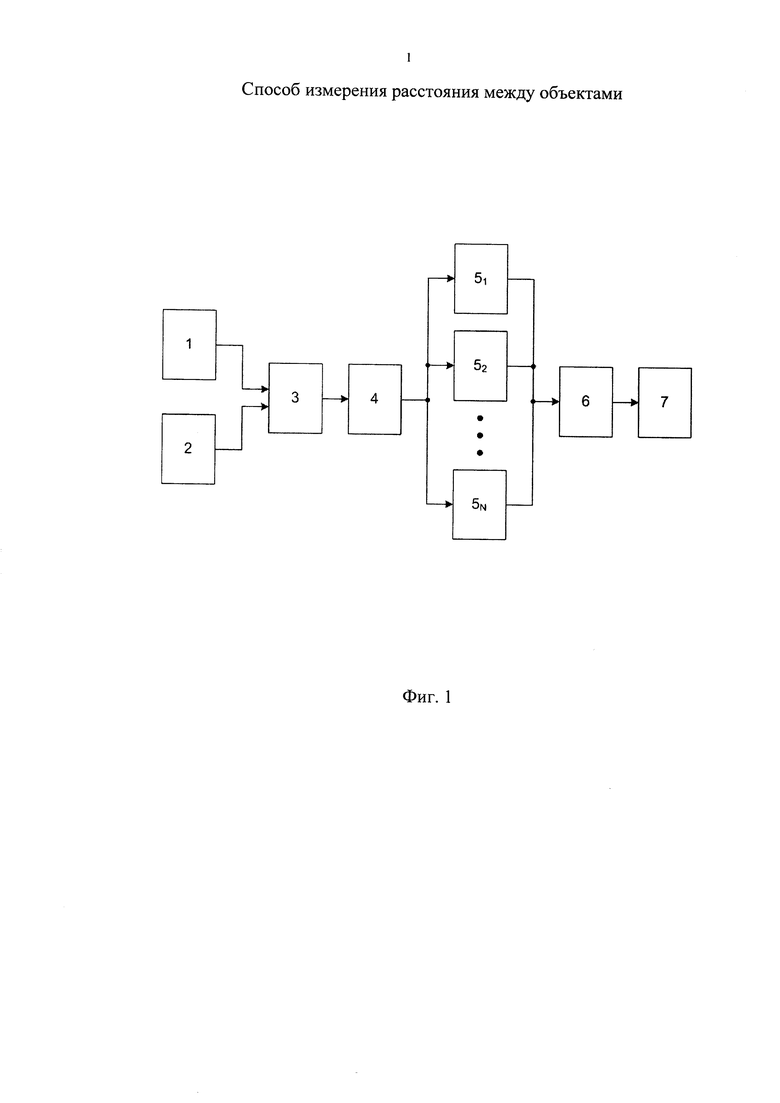
На фигуре 1 приведен пример структурной схемы устройства, на котором поясняются особенности реализации предложенного способа, где
1 и 2 - объекты;
3 - фотоприемное устройство;
4 - считывающее устройство;
51…5N - блоки вычисления координат признаков положения с первого по N y каждого из объектов;
6 - блок вычисления интегрального центра каждого объекта;
7 - блок вычисления расстояния между объектами и регистрации результата.
Световой поток от объектов 1 и 2 поступает на фотоприемное устройство 3, выход которого подключен к входу считывающего устройства 4. Выход считывающего устройства 4 подключен к входам блоков 51…5N вычисления координат каждого из N признаков положения первого и второго объектов, выходы которых соединены со входом блока 6, выход которого подключен к входу блока 7.
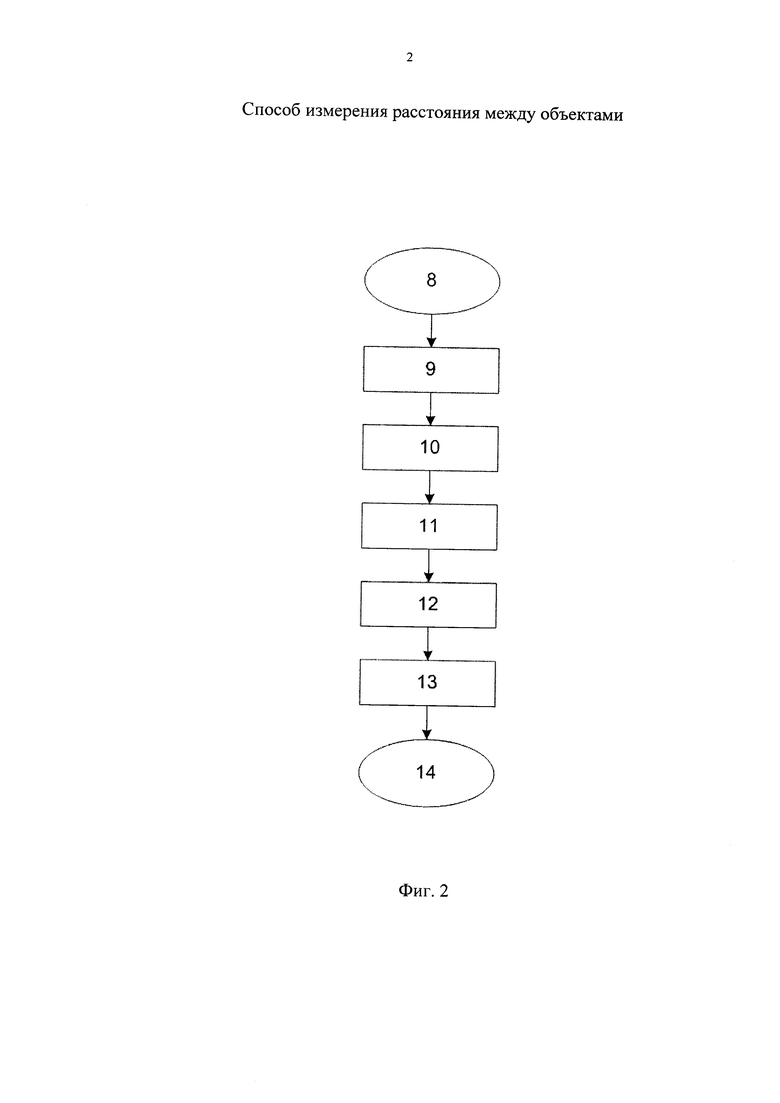
Способ измерения электрического сопротивления изоляции иллюстрируется диаграммой, описывающей очередность выполнения операций контроля, приведенной на фигуре 2, где
8 - начало;
9 - приведение системы в исходное состояние: выбор расположения осей координат на плоскости изображения, определение значимых признаков на изображениях, характеризующих положение объектов в пространстве и друг относительно друга, а также задание весовых коэффициентов влияния;
10 - формирование изображения объектов по результатам считывания его (например, с ПЗС матрицы);
11 - вычисление координат признаков у изображения каждого объекта;
12 - вычисление координат интегрального центра изображения каждого объекта по принятому правилу суммирования координат с учетом весовых коэффициентов влияния;
13 - определение расстояния между интегральными центрами, как расстояние между объектами;
14 - конец.
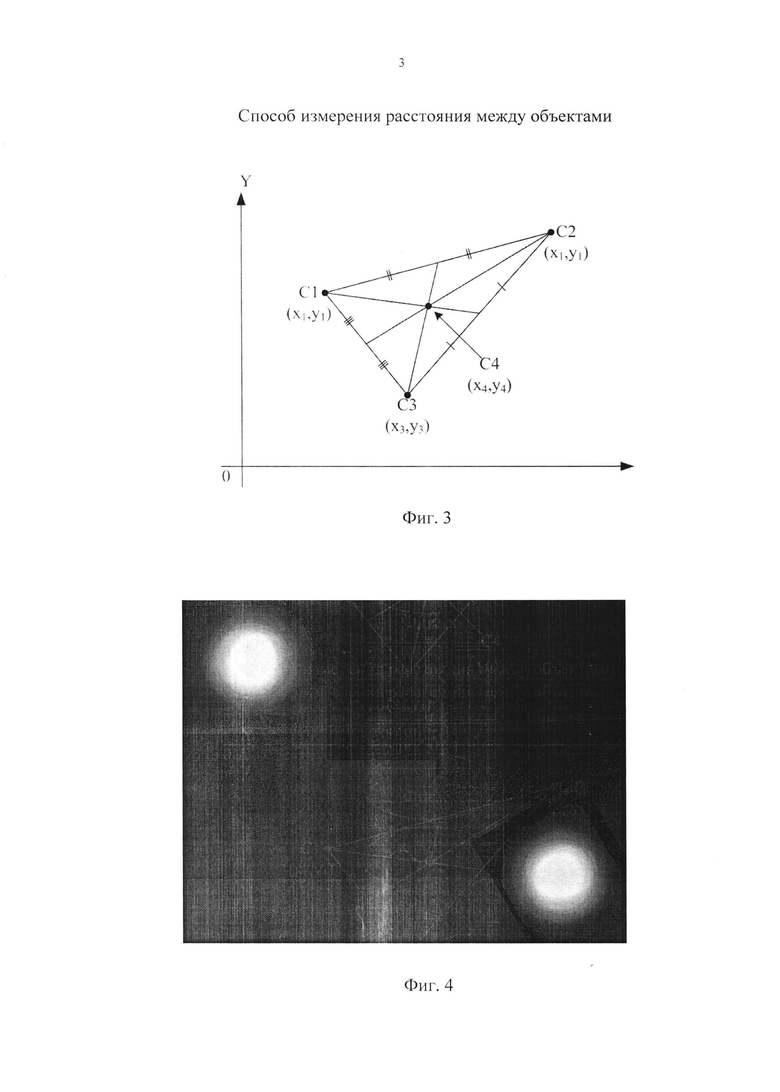
На фигуре 3 представлен пример определения интегрального центра C4(x4,y4) для трех признаков С1(x1,y1), С2(х2,у2), С3(х3,у3), характеризующих положение объекта. На фигуре 4 представлен пример обработки изображений двух объектов на ПЗС матрице (размером 744×576 пикселей) для определения расстояния между ними.
Способ реализуется следующим образом (см. фиг. 1 и фиг. 2).
На стадии настройки системы принимается решение о количестве и видах значимых признаков на изображениях, характеризующих положение объектов в пространстве и друг относительно друга (например, первый признак - энергетический центр, второй - самое яркое пятно на поверхности объекта, третий - геометрический центр и т.п.), а также задаются значения весовых коэффициентов влияния, определяющих степень влияния каждого из принятых признаков на положение интегрального центра объекта. В процессе работы формируется изображение объектов 1 и 2 в фотоприемном устройстве 3. С помощью устройства 4 кадр изображения поступает в блоки 51…5N, в которых вычисляются координаты признаков положения каждого объекта. Координаты интегрального центра каждого изображения вычисляют в блоке 6 по принятому принципу суммирования координат характерных признаков с учетом поправочных коэффициентов. Затем в блоке 7 вычисляют расстояние между объектами, которое определяется как произведение расстояния между интегральными центрами изображений на масштабный коэффициент, связывающий размер базового реального отрезка с размером его на кадре.
Из приведенного примера на фигуре 3 видно, что координаты интегрального центра С4 формируются, как среднее арифметическое координат признаков положения С1, С2 и С3 по оси Х и по оси Y:

и, при коэффициентах а, b и с, равных единице, С4 оказывается центром пересечения медиан треугольника, образованного тремя признаками С1, С2 и С3.
На фигуре 4 приведен пример реального кадра (размером 744×576 пикселей) с изображением двух объектов, расстояние между которыми определяется несколькими способами.
В таблице 1 приведены координаты характерных точек, связанных с положением изображений объектов в кадре на фигуре 4.
Где ХЭHi YЭHi координаты энергетического центра СЭH(ХЭH,YЭH), вычисленные по формулам:
где Hi,j - суммарный сигнал от всех элементов матрицы ПЗС; K и Р - соответствующие числа столбцов и строк матрицы; xi,j и yi,j - дискретные значения координат элементов вдоль направления строк и столбцов.
ХГi и YГi - координаты геометрического центра CГ(XГ,YГ), вычисленные по формулам:
XMi YMi - координаты самой яркой области на изображении объекта CM (XM, YM).
ХИ и YИ - координаты интегрального центра СИ(ХИ,YИ), вычисленные по формулам (1) и (2) при коэффициентах a, b и c, равных 1.
Расстояние Li между изображениями объектов определяется по формуле:

В таблице 2 приведены расстояния между изображениями по фигуре 4, вычисленные при использовании различных пар характерных точек.
Как расстояние между одноименными характерными точками СЭН, СГ, СМ и СИ, которые в общем случае не совпадают друг с другом, и их величина может зависеть от многих факторов (от освещенности до качества ПЗС матрицы, от конструктивных особенностей до режимов эксплуатации системы). Наиболее стабильной величиной будет расстояние LИ между интегральными центрами изображений, которое в меньшей степени подвержено изменениям из-за влияния отдельных возмущающих факторов.
Расстояние между объектами D определяется как произведение LИ на масштабный коэффициент М, определяемый отношением длины реального образцового отрезка к длине изображения его на снимке
Таким образом, заявляемый способ измерения линейного смещения объекта обеспечивает сохранение точности измерения при упрощении требований к характеристикам и параметрам объектов и тракту формирования изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ ОТНОСИТЕЛЬНО ДРУГ ДРУГА | 2017 |
|
RU2662256C1 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2550523C2 |
| СПОСОБ ВЫЧИСЛЕНИЯ СДВИГА В ДАТЧИКЕ ПЕРЕМЕЩЕНИЯ С ВЫСОКОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ | 2006 |
|
RU2328768C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2468383C1 |
| СПОСОБ ЛОКАЛЬНОЙ НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2706444C1 |
| Способ определения собственных координат по трем визирным светоизлучающим маркерам | 2024 |
|
RU2838123C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ КООРДИНАТНЫХ СМЕЩЕНИЙ ОБЪЕКТА СЛЕЖЕНИЯ В ПОСЛЕДОВАТЕЛЬНОСТИ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2460135C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2456542C2 |
| Способ определения координат точек фиксации взгляда на объекте наблюдения | 1986 |
|
SU1430027A1 |
Способ измерения расстояния между объектами относится к контрольно-измерительной технике, в частности к способам контроля взаимного положения объектов (или отдельных частей одного объекта) оптико-электронными методами, и может быть использован для контроля взаимного положения объектов в пространстве. Достигаемый технический результат - снижение требований к качеству исполнения отдельных узлов системы, реализующей предложенный способ, универсализация работы устройства, снижение требований к точности установки частей системы. Суть способа состоит в том, что формируют кадр с изображениями объектов, на изображении объектов определяют несколько характерных признаков, определяющих положение объектов в пространстве, определяют поправочные коэффициенты связи их положения с реальным изменением положения объекта и вычисляют координаты этих признаков у изображения каждого объекта. Положение интегрального центра каждого изображения вычисляют по принятому принципу суммирования координат характерных признаков с учетом поправочных коэффициентов, а затем вычисляют расстояние между объектами, которое определяется как произведение расстояния между интегральными центрами изображений на масштабный коэффициент, связывающий размер базового реального отрезка с размером его на кадре. 4 ил., 2 табл.
Способ измерения расстояния между объектами, состоящий в том, что формируют кадр с изображениями объектов, например, с помощью ПЗС матрицы, определяют координаты точек энергетического центра яркости каждого объекта и вычисляют расстояние между ними, отличающийся тем, что на изображении объектов выделяют несколько характерных признаков, определяющих положение объектов в пространстве, определяют поправочные коэффициенты связи их положения с реальным изменением положения объекта, вычисляют координаты этих признаков у изображения каждого объекта и вычисляют положение интегрального центра каждого изображения по принятому принципу суммирования координат характерных признаков с учетом поправочных коэффициентов, а затем вычисляют расстояние между объектами, которое определяется как произведение расстояния между интегральными центрами изображений на масштабный коэффициент, связывающий размер базового реального отрезка с размером его на кадре.
| УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ И ЛИНЕЙНЫХ КООРДИНАТ ОБЪЕКТА | 2013 |
|
RU2519512C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И ЛИНЕЙНЫХ РАЗМЕРОВ ОБЪЕКТОВ ПО ИХ ТЕЛЕВИЗИОННЫМ ИЗОБРАЖЕНИЯМ | 2008 |
|
RU2381521C2 |
| МАНОМЕТР | 1929 |
|
SU17809A1 |
| Способ получения азотно-фосфорного удобрения | 1928 |
|
SU13559A1 |
| US 5642299 A, 24.06.1997 | |||
| US 4107604 A, 15.08.1978 | |||
| JP 5310098 B2, 09.10.2013. | |||

