Область изобретения
Изобретение относится к оптико-электронным приборам и может быть использовано для измерения профиля тоннелей, например, в метрополитене.
Уровень техники
Известна лазерная сканирующая система Optech LYNX Mobile. Mapper M1. Фирма «Optech», Канада (аналог), основанная на способе регистрации сечения профиля тоннеля. Известный способ заключается в следующем:
формируют узкий световой пучок с помощью импульсного блока подсветки, оптическая ось которого совпадает с осью тоннеля;
направляют сформированный световой пучок на поверхность тоннеля с целью его подсветки с помощью зеркала, наклоненного к оси тоннеля и принадлежащего блоку подсветки;
формируют сечение профиля тоннеля в виде последовательно подсвеченных участков поверхности тоннеля за счет вращения вокруг оси тоннеля зеркала блока подсветки;
направляют отраженное от поверхности тоннеля излучение с помощью зеркала блока подсветки в блок регистрации с одноэлементным быстродействующим приемником излучения, оптическая ось которого параллельна оси тоннеля;
последовательно регистрируют импульсы излучения, отраженные от поверхности тоннеля, и определяют интервалы времени между посылкой импульсов излучения и регистрацией импульса отраженного излучения, по которым определяют расстояния от оси тоннеля до подсвеченных участков поверхности;
передают информацию о зарегистрированных расстояниях, сопоставляют их с эталонными расстояниями профиля и выявляют изменения радиуса сечения профиля.
Известное устройство регистрации сечения профиля тоннеля, расположенное на подвижном носителе, содержит:
- импульсный блок подсветки, оптическая ось которого расположена на оси тоннеля;
- зеркало, принадлежащее блоку подсветки, наклоненное к оси тоннеля и вращающееся вокруг нее;
- блок регистрации с одноэлементным быстродействующим приемником излучения, оптическая ось которого параллельна оси блока подсветки.
Недостатком аналога является высокая погрешность измерения расстояния из-за высокой частоты импульсов блока подсветки. Например, при регистрации 1000 точках на профиле с частотой 25 Гц минимальная частота импульсов равна 25 кГц, и на расстояниях 2000…3000 мм погрешность определения расстояния от оси тоннеля до подсвеченного участка поверхности составляет десятки мм.
Наиболее близкими по технической сущности и достигаемому результату является способ и устройство, предназначенные для контроля негабаритности размещения оборудования в тоннелях путем регистрации сечения профиля тоннеля (патент RU 2456544, 01.2006, G01C 7/06, G01B 11/24; он же принят в качестве прототипа).
1. Известный способ регистрации сечения профиля тоннеля содержит следующие этапы своего осуществления:
формируют узкий световой пучок с помощью блока подсветки, оптическая ось которого совпадает с осью тоннеля;
направляют сформированный световой пучок на поверхность тоннеля с целью его подсветки с помощью зеркала, наклоненного к оси тоннеля и принадлежащего блоку подсветки;
формируют сечение профиля тоннеля в виде последовательно подсвеченных участков поверхности тоннеля за счет вращения указанного зеркала вокруг оси тоннеля;
регистрируют изображения последовательно подсвеченных участков поверхности тоннеля с помощью видеокамеры с многоэлементным матричным приемником изображения (МПИ), оптическая ось которой совпадает с осью тоннеля;
передают информацию о зарегистрированных изображениях последовательно подсвеченных участков сформированного сечения профиля тоннеля;
сопоставляют зарегистрированные изображения последовательно подсвеченных участков сформированного сечения профиля тоннеля с участками эталонного профиля; и
выявляют изменения радиуса сечения профиля.
2. Известное устройство регистрации сечения профиля тоннеля, расположенное на подвижном носителе, содержит:
- блок подсветки, оптическая ось которого расположена на оси тоннеля;
- зеркало, принадлежащее блоку подсветки, наклоненное к оси тоннеля и вращающееся вокруг нее;
- видеокамеру с многоэлементным матричным приемником излучения, оптическая ось которой расположена на оси тоннеля.
Недостатком прототипа является большое угловое поле объектива видеокамеры, необходимое для уменьшения расстояния от блока подсветки до блока регистрации. При большом угловом поле (для существующих МПИ) фокусное расстояние объектива мало, что приводит к увеличению погрешности измерения радиуса сечения профиля тоннеля.
Раскрытие изобретения
Для устранения указанного недостатка в способе регистрации сечения профиля тоннеля, содержащем следующие этапы своего осуществления:
формируют узкий световой пучок с помощью блока подсветки, оптическая ось которого совпадает с осью тоннеля;
направляют сформированный световой пучок на поверхность тоннеля с целью его подсветки с помощью зеркала, наклоненного к оси тоннеля и принадлежащего блоку подсветки;
формируют сечение профиля тоннеля в виде последовательно подсвеченных участков поверхности тоннеля за счет вращения указанного зеркала вокруг оси тоннеля;
регистрируют изображения последовательно подсвеченных участков поверхности тоннеля с помощью видеокамеры с многоэлементным матричным приемником изображения, оптическая ось которой совпадает с осью тоннеля;
передают информацию о зарегистрированных изображениях последовательно подсвеченных участков сформированного сечения профиля тоннеля;
сопоставляют зарегистрированные изображения последовательно подсвеченных участков сформированного сечения профиля тоннеля с участками эталонного профиля; и
выявляют изменения радиуса сечения профиля.
При регистрации изображений последовательно подсвеченных участков поверхности тоннеля:
направляют оптическую ось видеокамеры в центр кольцевой зоны изменения радиуса тоннеля с помощью зеркала, наклоненного к оси тоннеля и принадлежащего видеокамере, причем нормаль этого зеркала лежит в одной плоскости с нормалью зеркала блока подсветки;
вращают видеокамеру вместе с ее зеркалом вокруг оси тоннеля синхронно с вращением зеркала блока подсветки, формируя изображения последовательно подсвеченных участков поверхности тоннеля на одной строке матричного приемника изображения; и
передают информацию об изображениях последовательно подсвеченных участков поверхности тоннеля по беспроводному каналу связи;
кроме того, угол наклона оптической оси видеокамеры к оси тоннеля определяют по формуле
где R - радиус светового сечения эталонного профиля тоннеля;
ΔR - ширина кольцевой зоны изменения радиуса сечения профиля тоннеля;
b - расстояние между зеркалом блока подсветки и зеркалом видеокамеры вдоль оси тоннеля;
φ1 - угол наклона зеркала блока подсветки к оси тоннеля.
Устройство регистрации сечения профиля тоннеля, расположенное на подвижном носителе, содержащее:
- блок подсветки, оптическая ось которого расположена на оси тоннеля;
- зеркало, принадлежащее блоку подсветки, наклоненное к оси тоннеля под углом и вращающееся вокруг нее;
- видеокамеру с многоэлементным матричным приемником излучения, оптическая ось которой расположена на оси тоннеля;
устройство дополнительно содержит зеркало, наклоненное к оси тоннеля и принадлежащее видеокамере, которое направляет оптическую ось видеокамеры в центр кольцевой зоны изменения радиуса сечения профиля тоннеля, причем нормаль этого зеркала лежит в одной плоскости с нормалью зеркала блока подсветки;
при этом указанное зеркало вращается вместе с видеокамерой вокруг оси тоннеля синхронно с вращением зеркала блока подсветки;
кроме того, угол наклона зеркала видеокамеры к оси тоннеля определяется по формуле
где R - радиус сечения эталонного профиля тоннеля;
ΔR - ширина кольцевой зоны изменения радиуса сечения профиля тоннеля;
b - расстояние между первым зеркалом и вторым зеркалом вдоль оси тоннеля;
φ1 - угол наклона первого зеркала к оси тоннеля.
Положительный эффект достигается за счет того, что
при вышеуказанной регистрации изображения последовательно подсвеченных участков поверхности тоннеля:
направляют оптическую ось видеокамеры в центр кольцевой зоны изменения радиуса тоннеля с помощью зеркала, наклоненного к оси тоннеля и принадлежащего видеокамере, причем нормаль этого зеркала лежит в одной плоскости с нормалью зеркала блока подсветки;
вращают видеокамеру вместе с ее зеркалом вокруг оси тоннеля синхронно с вращением зеркала блока подсветки, формируя изображения последовательно подсвеченных участков поверхности тоннеля на одной строке матричного приемника изображения; и
передают информацию об изображениях последовательно подсвеченных участков поверхности тоннеля по беспроводному каналу связи;
кроме того, угол наклона оптической оси видеокамеры к оси тоннеля определяется по формуле
где R - радиус сечения эталонного профиля тоннеля;
ΔR - ширина кольцевой зоны изменения радиуса сечения профиля тоннеля;
b - расстояние между зеркалом блока подсветки и зеркалом видеокамеры вдоль оси тоннеля;
φ1 - угол наклона зеркала блока подсветки к оси тоннеля.
Краткое описание чертежей
Сущность изобретения поясняется следующими чертежами:
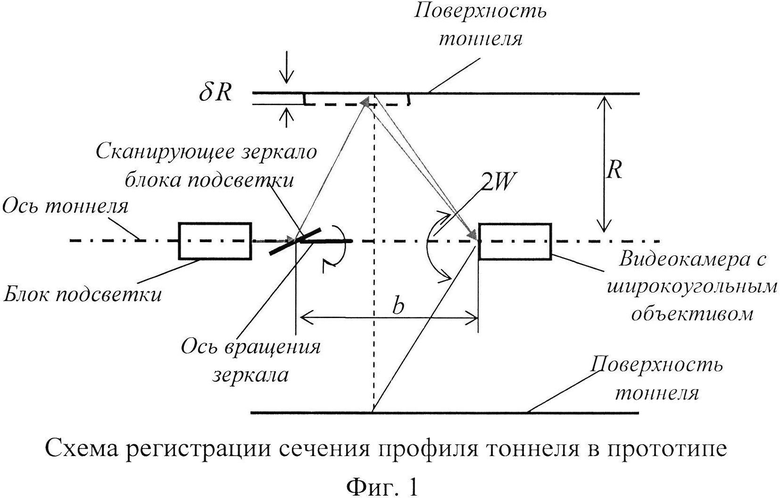
Фиг.1 - Схема регистрации сечения профиля тоннеля в прототипе.
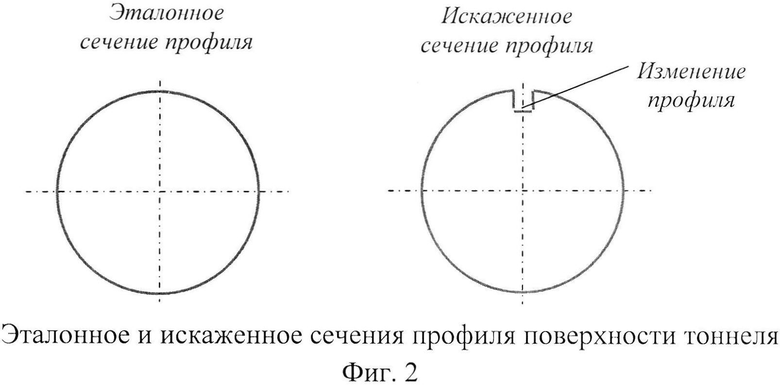
Фиг.2 - Эталонное и искаженное сечения профиля поверхности тоннеля.
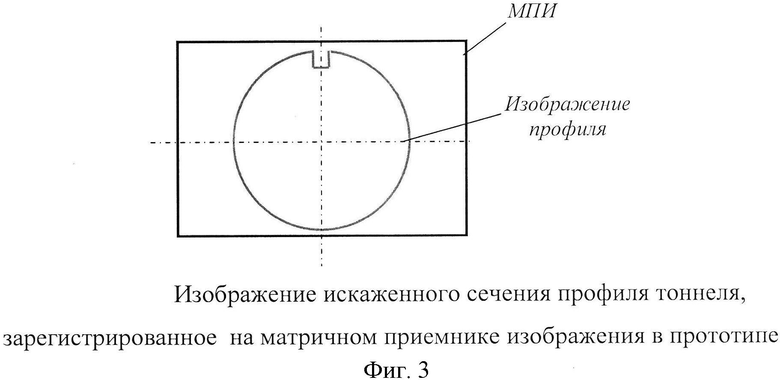
Фиг.3 - Изображение искаженного сечения профиля тоннеля, зарегистрированное на матричном приемнике изображения в прототипе.
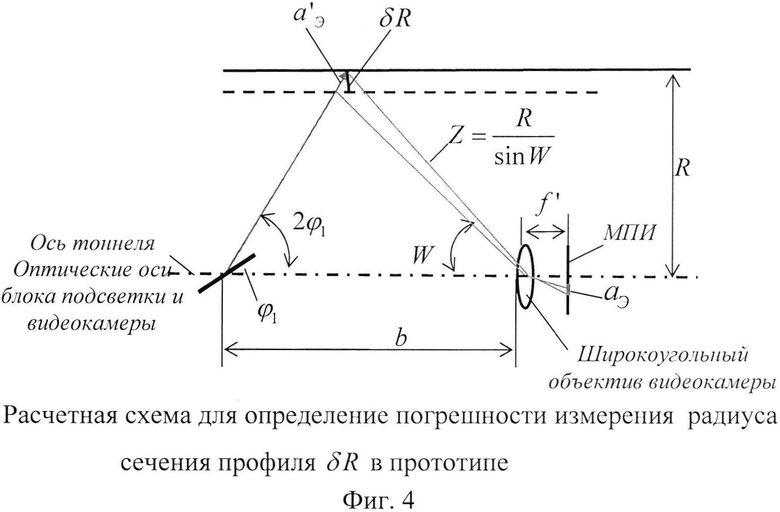
Фиг.4 - Расчетная схема для определения погрешности измерения радиуса сечения профиля тоннеля 8R в прототипе.
Фиг.5 - Схема предлагаемых способа и устройства регистрации сечения профиля тоннеля.
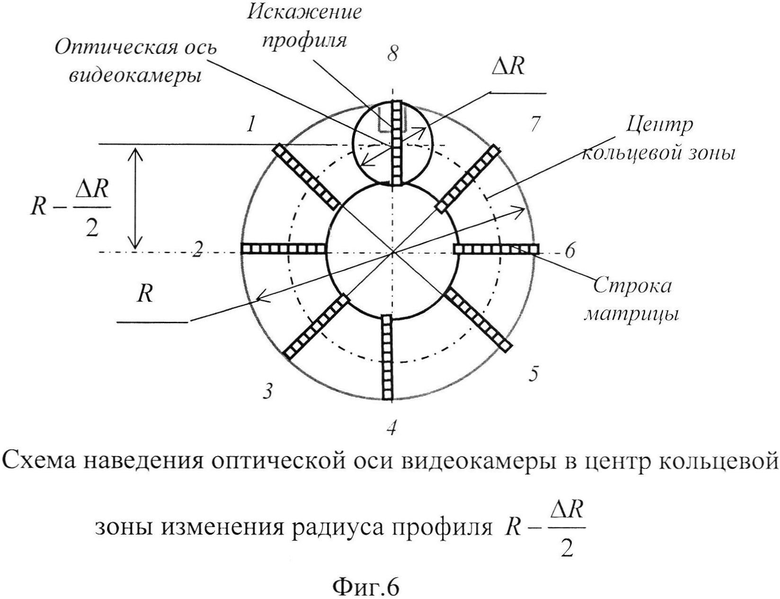
Фиг.6 - Схема наведения оптической оси видеокамеры в центр кольцевой зоны изменения радиуса профиля к 
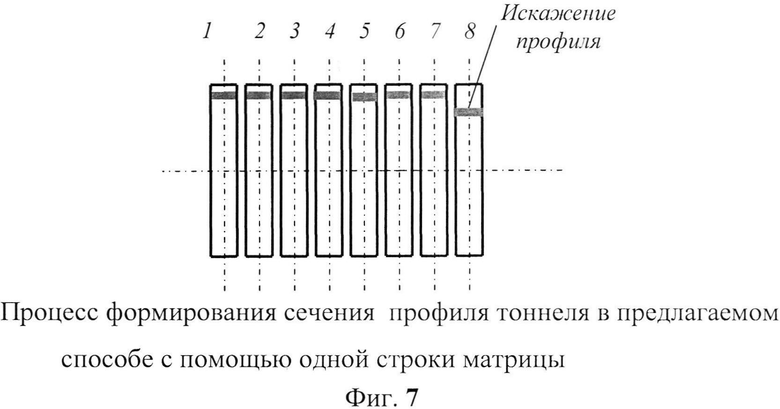
Фиг.7 - Процесс формирования сечения профиля тоннеля в предлагаемом способе с помощью одной строки матрицы.
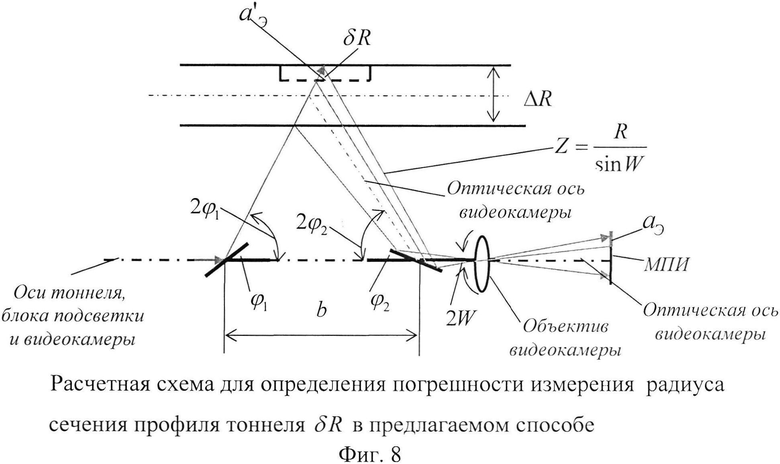
Фиг.8 - Расчетная схема для определения погрешности измерения радиуса сечения профиля тоннеля δR в предлагаемом способе.
На фиг.1 показана схема устройства регистрации сечения профиля тоннеля прототипа, содержащая лазерный блок подсветки, формирующий узкий световой пучок, оптическая ось которого совпадает с осью тоннеля, зеркало блока подсветки, наклоненное к оси тоннеля и направляющее пучок на поверхность тоннеля, видеокамеру с широкоугольным объективом и МПИ. Оптическая ось видеокамеры совпадает с осью тоннеля и оптической осью блока подсветки. Зеркало блока подсветки вращается вокруг оси тоннеля, за счет чего формируется сечение профиля тоннеля в виде последовательно подсвеченных участков поверхности тоннеля.
На фиг.2 показан эталонный профиль тоннеля и искаженный профиль, а на фиг.3 - изображение искаженного сечения профиля, зарегистрированное на МПИ.
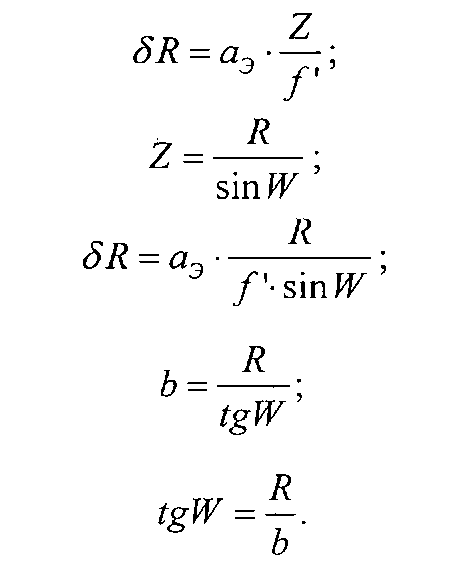
Погрешность регистрации размеров профиля (фиг.4) определяется расстоянием до подсвеченной поверхности Z, размером элемента МПИ а Э, расстоянием b между зеркалом блока подсветки и объективом видеокамеры, углом наклона лазерного пучка 2φ1 и фокусным расстоянием объектива видеокамеры f′.
Широкоугольные объективы синтезируются на основе широкоугольной телескопической системы с многократным угловым увеличением и узкопольного фотографического объектива. Поэтому увеличение объектива β приблизительно равно
где Z - расстояние от объектива видеокамеры до поверхности тоннеля
R - радиус сечения профиля тоннеля;
2W - угловое поле объектива видеокамеры.
Проекция элемента МПИ на плоскость, в которой лежит освещающий лазерный луч, 

Погрешность измерения радиуса тоннеля (фиг.5)

При этом база системы равна
Пример конкретной реализации прототипа
Параметры матрицы видеокамеры:
- количество элементов матрицы М×N=800×600;
- размеры матрицы a M×bM=6,4×4,8 мм2;
- размер элемента матрицы а Э=0,008 мм;
- частота кадров матрицы fM=25 Гц;
- время экспозиции кадра матрицы tM=0,04 с.
При скорости движения 

Для формирования полного профиля за время кадра матрицы tM=0,04c угловая скорость вращения сканирующего зеркала должна быть равной
Пример расчета погрешности прототипа приводится для частного случая перпендикулярного падения луча на поверхность тоннеля, т.е. для 2φ1=90°, при котором погрешность измерения радиуса определяется как
Для радиуса тоннеля R=2,5 м и базе b=300 мм
угловое поле объектива видеокамеры 2W=166°.
Фокусное расстояние широкоугольного объектива определяется по формуле

и при угловом поле 2W=166°=2,9 рад фокусное расстояние равно
Расстояние от объектива до подсвеченного участка поверхности равно

Погрешность измерения прототипа

Большая погрешность получается из-за малого фокусного расстояния объектива видеокамеры. Уменьшение погрешности может быть достигнуто за счет увеличения базы, что приводит к увеличению габаритов системы.
На фиг.5 представлена схема устройства, реализующего предлагаемый способ.
Предлагаемое устройство (фиг.5) содержит лазерный блок подсветки, оптическая ось которого совпадает с осью тоннеля, зеркало, наклоненное к оси тоннеля и принадлежащее блоку подсветки, видеокамеру с МПИ, оптическая ось которой совпадает с оптической осью блока подсветки, причем видеокамера снабжена наклоненным к оси тоннеля зеркалом, которое направляет оптическую ось указанной видеокамеры в центр кольцевой зоны изменения радиуса сечения профиля тоннеля. При этом нормаль этого зеркала лежит в одной плоскости с нормалью зеркала блока подсветки.
Зеркало блока подсветки направляет пучок на поверхность тоннеля и вращается вокруг оси тоннеля, за счет чего формируется сечение профиля тоннеля в виде последовательно подсвеченных участков поверхности тоннеля.
Видеокамера с зеркалом вращаются вокруг оси тоннеля синхронно с вращением зеркала блока подсветки и регистрирует на одной строке МПИ изображения последовательно подсвеченных участков поверхности тоннеля.
Угол наклона зеркала видеокамеры к оси тоннеля φ2 определяется по формуле
где R - радиус сечения эталонного профиля тоннеля;
ΔR - ширина кольцевой зоны изменения радиуса сечения профиля тоннеля;
b - расстояние между первым зеркалом и вторым зеркалом вдоль оси тоннеля;
φ1 - угол наклона первого зеркала к оси тоннеля.
При этом оптическая ось видеокамеры наклонена к оси тоннеля на угол
На фиг.6 приведена схема наведения оптической оси видеокамеры в центр кольцевой зоны изменения радиуса профиля.
При регистрации изменения сформированного сечения профиля тоннеля в виде изображений последовательно подсвеченных участков поверхности тоннеля, используют элементы только одной строки указанного МПИ, на которой расположены изображения последовательно подсвеченных участков поверхности тоннеля,
На фиг.6 приведены 8 положений одной строки матрицы, при которых регистрируются 8 точек сечения профиля.
Положение светового пятна на строке матрицы (фиг.7) характеризует отклонение радиуса сечения профиля от эталонного.
Погрешность измерения радиуса тоннеля (фиг.8) определяется так же, как и в прототипе
Поскольку в соответствии с предлагаемым способом осуществляют вращение видеокамеры, то передачи сигнала с МПИ осуществляются по беспроводному каналу связи.
Пример конкретной реализации предлагаемых способа и устройства регистрации сечения профиля тоннеля приводится для тех же условий, что и в прототипе.
Ширина кольцевой зоны, в центр которой наводится оптическая ось видеокамеры, ΔR=1 м при радиусе тоннеля R=2,5 м.
Угол наклона оптической оси видеокамеры равен при φ1=45° и 2φ1=90° и b=300 мм (фиг.8)
Угол наклона зеркала видеокамеры к оси тоннеля
угловое поле объектива видеокамеры
Фокусное расстояние объектива видеокамеры
Погрешность измерения предлагаемых способа и устройства

При этом для регистрации на профиле 1000 точек (через 0,36 градуса или через 16 мм) требуется частота строки fСТР в 1000 больше, чем частота кадров матрицы fM

что легко реализуется на практике.
Таким образом, за счет применения узкопольного объектива с увеличенным фокусным расстоянием погрешность измерения радиуса сечения профиля тоннеля уменьшена по сравнению с прототипом более чем в 50 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ НЕГАБАРИТНОСТИ РАЗМЕЩЕНИЯ ОБОРУДОВАНИЯ В ТУННЕЛЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2456544C2 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2008 |
|
RU2369996C1 |
| СПОСОБ ПОСТРОЕНИЯ ПРОФИЛЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091710C1 |
| ЖИДКОСТНЫЙ УРОВНЕМЕР | 2006 |
|
RU2350913C2 |
| ИРИДОЛОГИЧЕСКИЙ ПРИБОР | 1994 |
|
RU2153280C2 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОБЪЕКТА В ОКРУЖАЮЩЕМ ПРОСТРАНСТВЕ И ПАНОРАМНАЯ АППАРАТУРА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2420774C2 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
| МНОГОСПЕКТРАЛЬНЫЙ ДАТЧИК С ОБЩЕЙ АПЕРТУРОЙ | 2003 |
|
RU2234177C1 |
| КЕРАТОМЕТР | 2004 |
|
RU2264782C1 |
| Устройство для измерения поперечных размеров проката | 1990 |
|
SU1783299A1 |
Изобретение относится к оптико-электронным приборам и может быть использовано для измерения профиля тоннелей. Согласно способу, формируют узкий световой пучок с помощью блока подсветки, направляют его на поверхность тоннеля с помощью зеркала, наклоненного к оси тоннеля и принадлежащего блоку подсветки, формируют сечение профиля тоннеля в виде последовательно подсвеченных за счет вращения указанного зеркала участков, регистрируют их изображения видеокамерой и направляют оптическую ось видеокамеры в центр кольцевой зоны изменения радиуса тоннеля с помощью зеркала, принадлежащего видеокамере. Видеокамеру с ее зеркалом вращают вокруг оси тоннеля синхронно с вращением зеркала блока подсветки. Далее сопоставляют изображения участков с участками эталонного профиля и выявляют изменения радиуса сечения профиля. Угол наклона оптической оси видеокамеры к оси тоннеля определяют по формуле
где R - радиус сечения эталонного профиля тоннеля; ΔR - ширина кольцевой зоны изменения радиуса сечения профиля тоннеля; b - расстояние между зеркалом блока подсветки и зеркалом видеокамеры вдоль оси тоннеля; φ1 - угол наклона зеркала блока подсветки к оси тоннеля. Технический результат - уменьшение погрешности измерения радиуса сечения профиля. 2 н.п. ф-лы, 8 ил.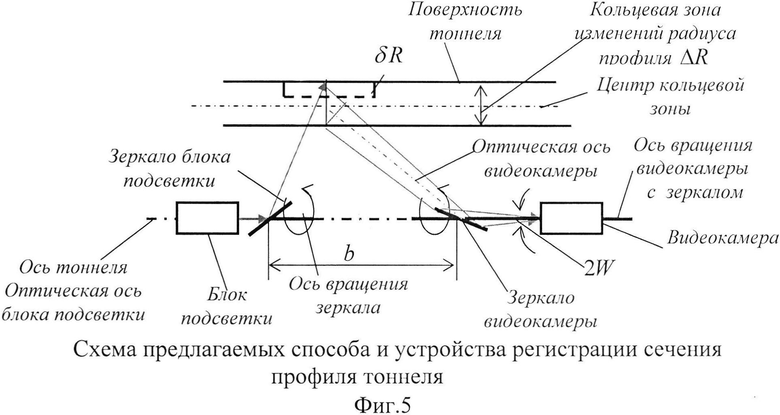
1. Способ регистрации сечения профиля тоннеля, содержащий следующие этапы своего осуществления:
формируют узкий световой пучок с помощью блока подсветки, оптическая ось которого совпадает с осью тоннеля;
направляют сформированный световой пучок на поверхность тоннеля с целью его подсветки с помощью зеркала, наклоненного к оси тоннеля и принадлежащего блоку подсветки;
формируют сечение профиля тоннеля в виде последовательно подсвеченных участков поверхности тоннеля за счет вращения указанного зеркала вокруг оси тоннеля;
регистрируют изображения последовательно подсвеченных участков поверхности тоннеля с помощью видеокамеры с многоэлементным матричным приемником изображения, оптическая ось которой совпадает с осью тоннеля;
передают информацию о зарегистрированных изображениях последовательно подсвеченных участков сформированного сечения профиля тоннеля;
сопоставляют зарегистрированные изображения последовательно подсвеченных участков поверхности тоннеля с эталонным профилем тоннеля; и
выявляют изменения радиуса сечения профиля,
отличающийся тем, что
при регистрации изображений последовательно подсвеченных участков поверхности тоннеля:
направляют оптическую ось видеокамеры в центр кольцевой зоны изменения радиуса тоннеля с помощью зеркала, наклоненного к оси тоннеля и принадлежащего видеокамере, причем нормаль этого зеркала лежит в одной плоскости с нормалью зеркала блока подсветки;
вращают видеокамеру вместе с ее зеркалом вокруг оси тоннеля синхронно с вращением зеркала блока подсветки, формируя изображения последовательно подсвеченных участков поверхности тоннеля на одной строке матричного приемника изображения,
после чего передают информацию об изображениях последовательно подсвеченных участков поверхности тоннеля по беспроводному каналу связи;
кроме того, угол наклона оптической оси видеокамеры к оси тоннеля определяют по формуле
где R - радиус сечения эталонного профиля тоннеля;
ΔR - ширина кольцевой зоны изменения радиуса сечения профиля тоннеля;
b - расстояние между зеркалом блока подсветки и зеркалом видеокамеры вдоль оси тоннеля;
φ1 - угол наклона зеркала блока подсветки к оси тоннеля.
2. Устройство регистрации сечения профиля тоннеля, расположенное на подвижном носителе, содержащее:
- блок подсветки, оптическая ось которого расположена на оси тоннеля;
- зеркало, принадлежащее блоку подсветки, наклоненное к оси тоннеля и вращающееся вокруг нее;
- видеокамеру с многоэлементным матричным приемником излучения, оптическая ось которой расположена на оси тоннеля,
отличающееся тем, что
устройство дополнительно содержит: зеркало, принадлежащее видеокамере, наклоненное к оси тоннеля, которое направляет оптическую ось видеокамеры в центр кольцевой зоны изменения радиуса сечения профиля тоннеля, причем нормаль этого зеркала лежит в одной плоскости с нормалью зеркала блока подсветки; при этом указанное зеркало вращается вместе с видеокамерой вокруг оси тоннеля синхронно с вращением зеркала блока подсветки,
кроме того, угол наклона зеркала видеокамеры к оси тоннеля определяется по формуле
где R - радиус сечения эталонного профиля тоннеля;
ΔR - ширина кольцевой зоны изменения радиуса сечения профиля тоннеля;
b - расстояние между первым зеркалом и вторым зеркалом вдоль оси тоннеля;
φ1 - угол наклона первого зеркала к оси тоннеля.
| СПОСОБ КОНТРОЛЯ НЕГАБАРИТНОСТИ РАЗМЕЩЕНИЯ ОБОРУДОВАНИЯ В ТУННЕЛЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2456544C2 |
| CN 102721365 A, 10.10.2012 | |||
| US 5274437 A, 28.12.1993 | |||
| СПОСОБ ВЕДЕНИЯ ДОМЕННОЙ ПЛАВКИ | 1995 |
|
RU2094470C1 |

