Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству атомно-силовой микроскопии с динамическим режимом.
Уровень техники
Ниже приведено описание Атомно-Силовой Микроскопии (АСМ).
АСМ с контактным режимом представляет собой способ формирования изображения "поверхности постоянной силы" поверхности образца путем детектирования силы (обычно - силы отталкивания), которая возникает между зондом и образцом, когда консоль с прикрепленным к ней зондом подносится близко к упомянутой поверхности образца, на основании изгибания консоли и путем двухмерного сканирования образца посредством упомянутого зонда с одновременным управлением расстоянием зонд-образец таким образом, чтобы детектируемая сила удерживалась на постоянном уровне. Этот способ АСМ с контактным режимом создает существенные повреждения образца из-за большой силы, образуемой между зондом и образцом, и достижение атомного разрешения представляется сложным.
В отличие от этого АСМ с динамическим режимом представляет собой способ формирования изображения "поверхности постоянного градиента силы" поверхности образца путем расположения консоли с прикрепленным к ней зондом близко к поверхности образца, путем детектирования изменения резонансной частоты упомянутой консоли из-за дифференциала (градиента силы) силы, возникающей между зондом и образом, относительно расстояния зонд-образец и путем двухмерного сканирования образца посредством зонда с одновременным управлением расстоянием зонд-образец таким образом, чтобы изменение резонансной частоты оставалось постоянным.
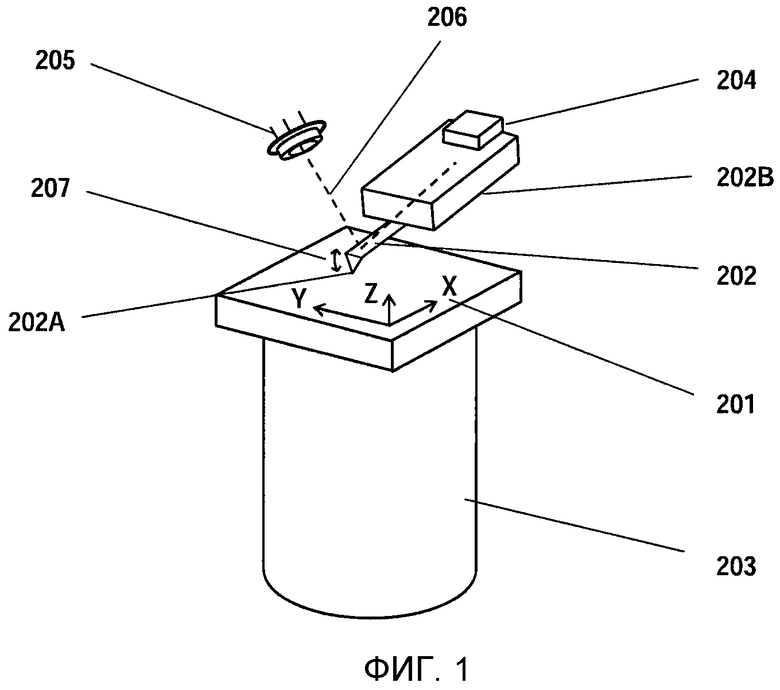
На Фиг.1 представлена иллюстративная конфигурация области образца и консоли обычного устройства АСМ с динамическим режимом.
На Фиг.1 ссылочный номер 201 обозначает образец, 202A обозначает зонд консоли 202, 202B обозначает основу консоли 202, 203 обозначает сканер по осям XYZ, 204 обозначает средство возбуждения консоли, 205 обозначает оптический детектор положения (детектор с оптическим рычагом) для детектирования положения консоли 202 путем облучения нижней стороны консоли 202 лазерным лучом 206, и 207 обозначает состояние колебаний изгиба консоли.
На Фиг.1 показаны направления X, Y и Z, поскольку в следующем описании используется система координат XYZ. Хотя в этом примере образец 201 установлен на XYZ-сканере 203, существуют другие варианты, в которых консоль 202 прикреплена к XYZ-сканеру 203, или образец 201 прикреплен к XY-сканеру, а консоль 202 прикреплена к Z-сканеру. Более того, хотя на этой фигуре проиллюстрировано средство 204 возбуждения консоли, схожее с пьезоэлектрическим элементом, также можно применять фототермическое возбуждение или электромагнитное поле. Сверх того, хотя в этом примере для детектирования изгиба консоли используется оптический детектор 205 положения с оптическим рычагом, также можно применять детектирование скорости посредством лазерного доплеровского виброметра или детектирование смещения посредством волоконно-оптического интерферометра.
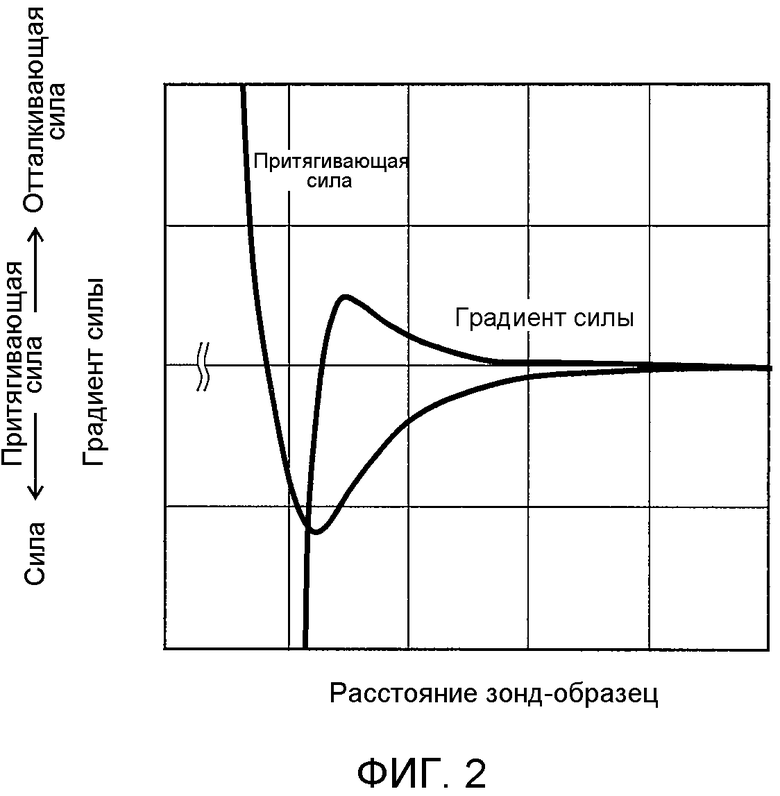
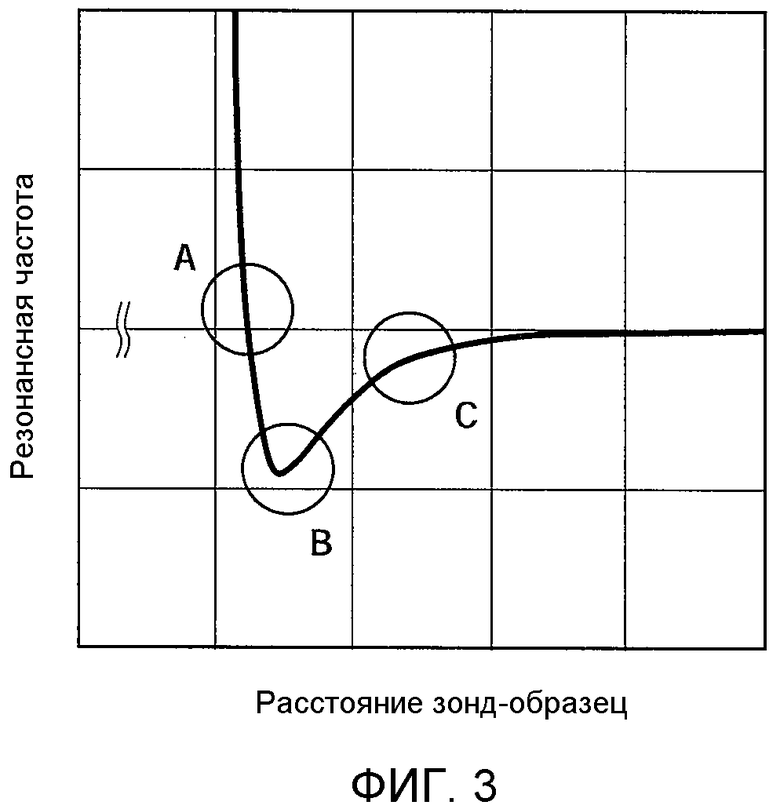
Фиг.2 представляет собой иллюстрацию одного примера отношения между расстоянием зонд-образец, силой и градиентом силы, воздействующей на консоль, а Фиг.3 представляет собой иллюстрацию одного примера отношения между расстоянием зонд-образец и резонансной частотой консоли. Вариация резонансной частоты консоли из-за градиента силы обусловлена тем, что сила, которая варьирует в зависимости от расстояния, эквивалентна пружине, и соответственно, сила, обусловленная эквивалентной пружиной, добавляется к силе пружины, предоставленной на упомянутой консоли. Тем не менее эквивалентная пружина будет иметь отрицательную константу пружины, когда полярность градиента силы отрицательна. Когда же применяется отрицательная константа пружины, резонансная частота будет сокращаться.
Способы для детектирования изменения резонансной частоты включают в себя: (1) способ, в котором сама консоль используется в качестве механического резонатора, чтобы формировать колебательный контур с самовозбуждением для детектирования частоты колебаний; и (2) способ, в котором консоль принудительно вибрирует на постоянной частоте, близкой по значению к резонансной частоте, чтобы детектировать изменение резонансной частоты из фазовой разности между сигналом, используемым для вибрации, и детектируемой вибрацией. Обозначая способы (1) и (2) способом Частотной Модуляции (ЧМ) и способом Фазовой Модуляции (ФМ), соответственно, существует третий способ (3), в котором используется принудительная вибрация, и частота для принудительной вибрации управляется таким образом, чтобы соответствовать резонансной частоте, путем использования детектируемой фазовой разности. Этот способ обозначается как способ раздельного возбуждения с отслеживанием.
Поскольку любой из вышеперечисленных способов может детектировать информацию по частотной оси при высокой чувствительности путем сужения наблюдаемой частотной полосы, АСМ с динамическим режимом позволяет осуществлять наблюдение в области, где сила зонд-образец имеет низкое значение, по сравнению с АСМ с контактным режимом, в результате чего образец повреждается в меньшей степени и достижение атомного разрешения реализуется более легко.
Как описано выше, АСМ с динамическим режимом отслеживает "поверхность постоянного градиента силы". "Поверхность постоянного градиента силы" обычно рассматривается как приблизительно "поверхность постоянной высоты". Поскольку график градиента силы с Фиг.2 варьирует в зависимости от видов атомов, "поверхность постоянного градиента силы" будет идентична действительной "поверхности постоянной высоты" только в том случае, когда график градиента силы с Фиг.2 не будет меняться, упомянутый образец будет состоять из атомов одного элемента, и кончик зонда будет располагаться непосредственно над атомом или между атомами. Следовательно, для образца, который состоит из атомов множества элементов, "поверхность постоянного градиента силы" не будет идентична действительной "поверхности постоянной высоты", и наблюдаемые виды атомов будет невозможно оценить, если предварительно не будет предоставлена некоторая информация о составных элементах или кристаллических структурах этого образца.
Между тем есть публикации, в которых описывается, что позиция точки минимума (точки B, где резонансная частота сокращается больше всего, то есть точки, где градиент силы с Фиг.2 имеет максимальное значение) в графике с Фиг.3 является характеристикой видов атомов, и следовательно, типы атомов могут быть определены путем получения этой позиции точки минимума (см. Непатентный Документ 1).
Согласно этому способу предоставляется возможность окрашивать топографическое изображение (трехмерное графическое представление "поверхности постоянного градиента силы") образца, наблюдаемое при обычной АСМ с динамическим режимом на основании топов атомов, полученных из позиции точки минимума, так чтобы отображать изображение, в котором каждый вид атомов окрашен в разный цвет.
Непатентный Документ 1: Yoshiaki Sugimoto et al., "Chemical identification of individual surface atoms by atomic force microscopy", Nature, Vol. 446, 2007, pp. 64-67.
Сущность изобретения
Тем не менее согласно способу вышеупомянутого Непатентного Документа 1, необходимо установить зонд точно на атоме образца и выровнять кривые силы несколько сотен раз. То есть необходимо получить график с Фиг.3 для каждого типа атома, получить вручную позицию его точки минимума и определиться с цветом окраски. Этот процесс требуется гораздо больше времени, чем съем изображения в реальном масштабе времени, как в обычной АСМ с динамическим режимом и т.п.
С учетом вышеизложенного, целью настоящего изобретения является предоставление устройства АСМ с динамическим режимом, которое формирует автоматическую систему управления, которая может автоматически получать расстояние зонд-образец и позволяет выполнять высокоскоростную идентификацию атомов поверхности образца.
Чтобы достичь вышеизложенной цели, настоящее изобретение предоставляет:
[1] Устройство АСМ с динамическим режимом, содержащее: сканнер для выполнения трехмерного относительного сканирования консоли и образца; средство для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли; средство для возбуждения колебаний изгиба консоли с резонансной частотой; средство для генерации сигнала переменного тока второй частоты, которая ниже упомянутой частоты колебаний изгиба; средство для модуляции расстояния зонд-образец консоли посредством второй частоты; средство для детектирования флуктуации резонансной частоты; средство для детектирования вибрации консоли; средство для детектирования компонента флуктуации, который содержится в детектированном сигнале, с помощью средства для детектирования флуктуации резонансной частоты, и который синхронизирован с сигналом модуляции расстояния зонд-образец, причем наклон резонансной частоты относительно расстояния зонд-образец получается из мощности и полярности упомянутого компонента флуктуации.
[2] Устройство АСМ с динамическим режимом по п.[1], в котором расстояние зонд-образец автоматически управляется таким образом, чтобы наклон резонансной частоты относительно расстояния зонд-образец становился равным нулю.
[3] Устройство АСМ с динамическим режимом по п.[1] или [2], в котором частота в моде с колебаниями изгиба более низкого порядка используется как вторая частота, которая отличается от упомянутой частоты в моде с колебаниями изгиба.
[4] Устройство АСМ с динамическим режимом по п.[1], [2] или [3], в котором колебательный контур с самовозбуждением, который генерирует колебания на упомянутой резонансной частоте, сконфигурирован как средство для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли, и детектирование частоты используется как средство для детектирования флуктуации резонансной частоты.
[5] Устройство АСМ с динамическим режимом по п.[1], [2] или [3], в котором колебательный контур с самовозбуждением, который генерирует колебания на упомянутой резонансной частоте, сконфигурирован как средство для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли, и детектирование фазы используется как средство для детектирования флуктуации резонансной частоты.
[6] Устройство АСМ с динамическим режимом по п. [1], [2] или [3], в котором источник сигнала для генерации сигнала переменного тока некоторой частоты, которая имеет постоянное значение в диапазоне резонансной частоты упомянутого режима или которая управляется таким образом, чтобы медленно следовать резонансной частоте упомянутого режима, используется как средство для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли, и средство для детектирования флуктуации этой резонансной частоты конфигурируется путем детектирования фазы смещения или скорости консоли относительно сигнала.
Краткое описание чертежей
Фиг.1 - иллюстрация примера конфигурации в области образца и консоли обычного устройства АСМ с динамическим режимом;
Фиг.2 - пример взаимосвязи между расстоянием зонд-образец, силой и градиентом силы, воздействующей на консоль;
Фиг.3 - пример взаимосвязи между расстоянием зонд-образец и резонансной частотой консоли;
Фиг.4 - структурная схема устройства АСМ с динамическим режимом согласно настоящему изобретению;
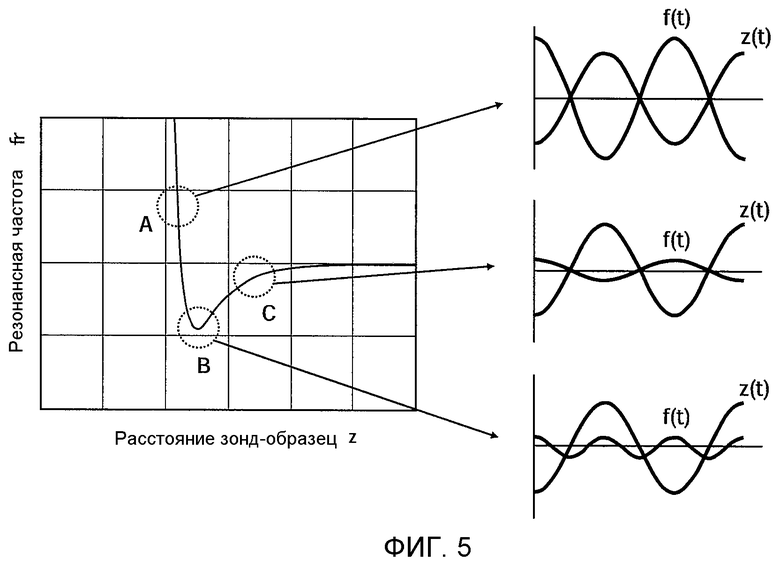
Фиг.5 - диаграмма волн возмущающих сигналов и изменений резонансной частоты, где наклон резонансной частоты относительно расстояния зонд-образец имеет положительное (C), отрицательное (A) или нулевое значение (B), согласно устройству АСМ с динамическим режимом по настоящему изобретению;
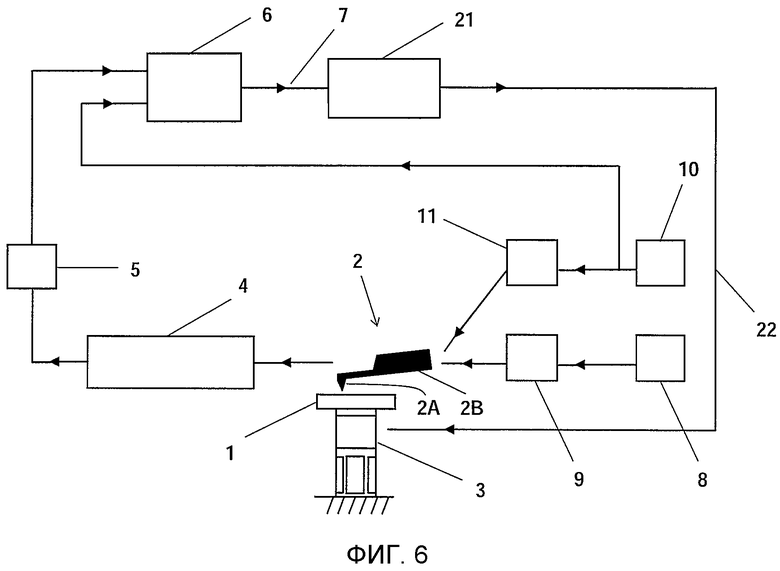
Фиг.6 - структурная схема устройства АСМ с динамическим режимом, иллюстрирующая первый вариант осуществления настоящего изобретения;
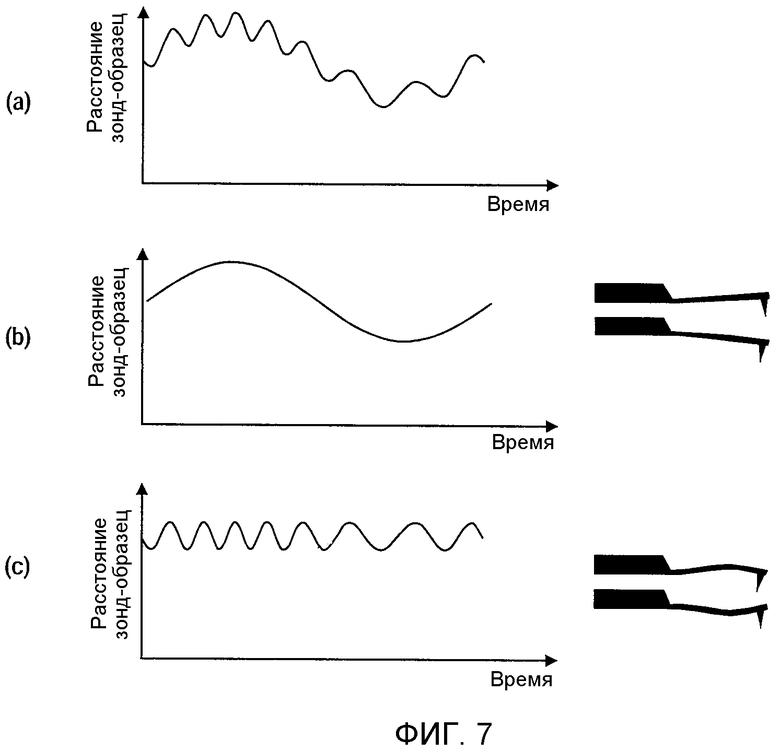
Фиг.7 - иллюстрация временного изменения расстояния зонд-образец в устройстве АСМ с динамическим режимом согласно настоящему изобретению;
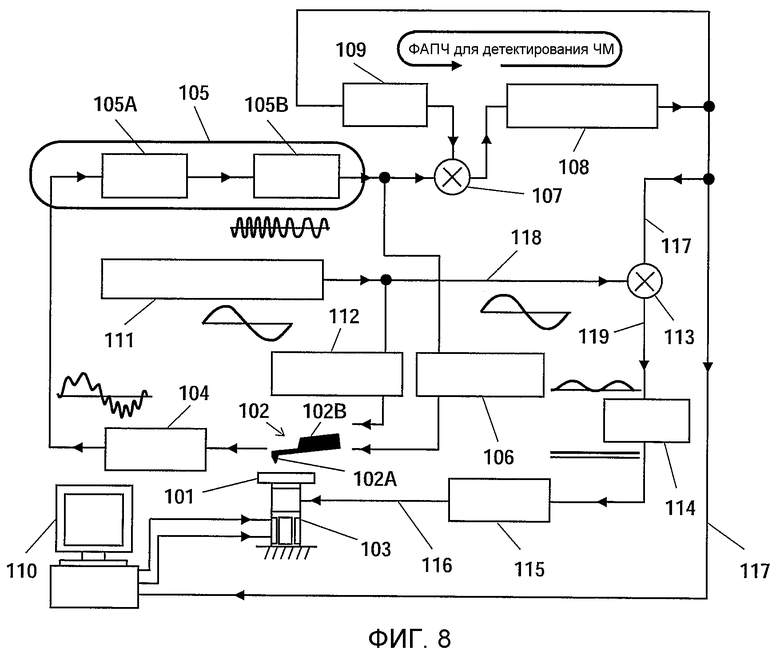
Фиг.8 - структурная схема устройства АСМ с динамическим режимом, иллюстрирующая второй вариант осуществления настоящего изобретения;
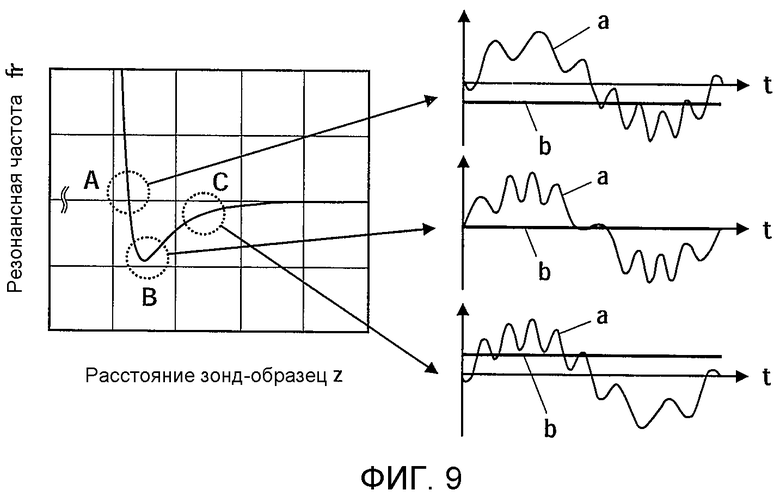
Фиг.9 - диаграмма волн вибрации и наклонов резонансной частоты, где наклон резонансной частоты относительно расстояния зонд-образец имеет положительное (C), отрицательное (A) или нулевое значение (B), согласно устройству АСМ с динамическим режимом по настоящему изобретению;
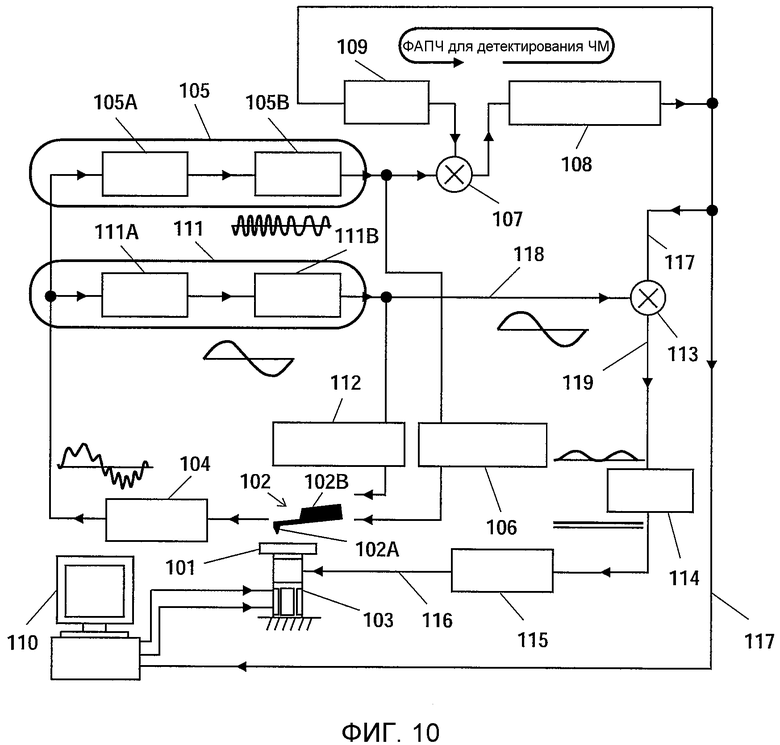
Фиг.10 - структурная схема устройства АСМ с динамическим режимом, иллюстрирующая третий вариант осуществления настоящего изобретения;
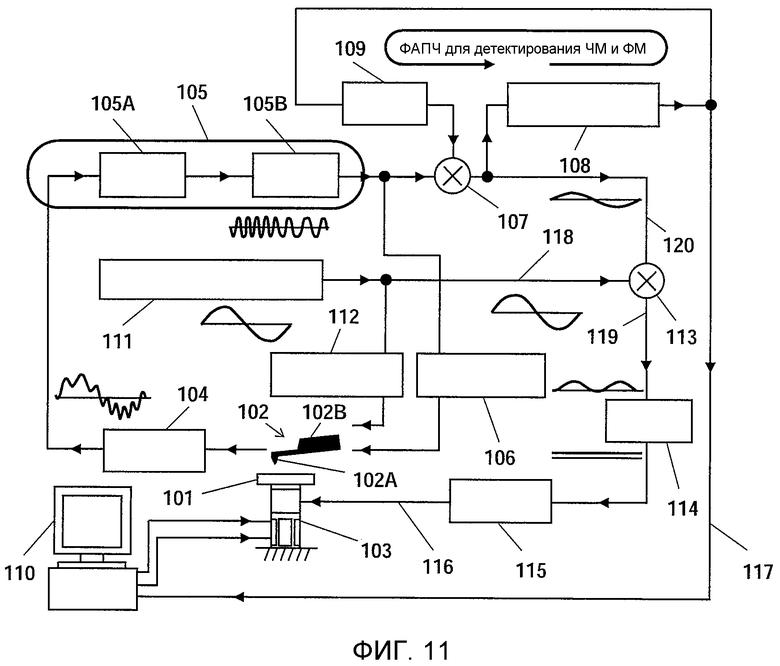
Фиг.11 - структурная схема устройства АСМ с динамическим режимом, иллюстрирующая четвертый вариант осуществления настоящего изобретения;
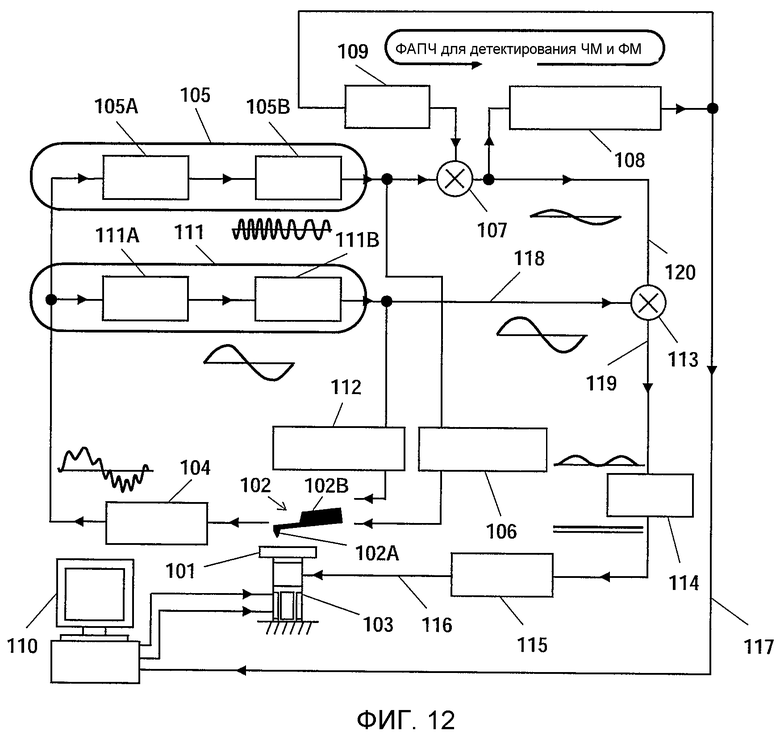
Фиг.12 - структурная схема устройства АСМ с динамическим режимом, иллюстрирующая пятый вариант осуществления настоящего изобретения;
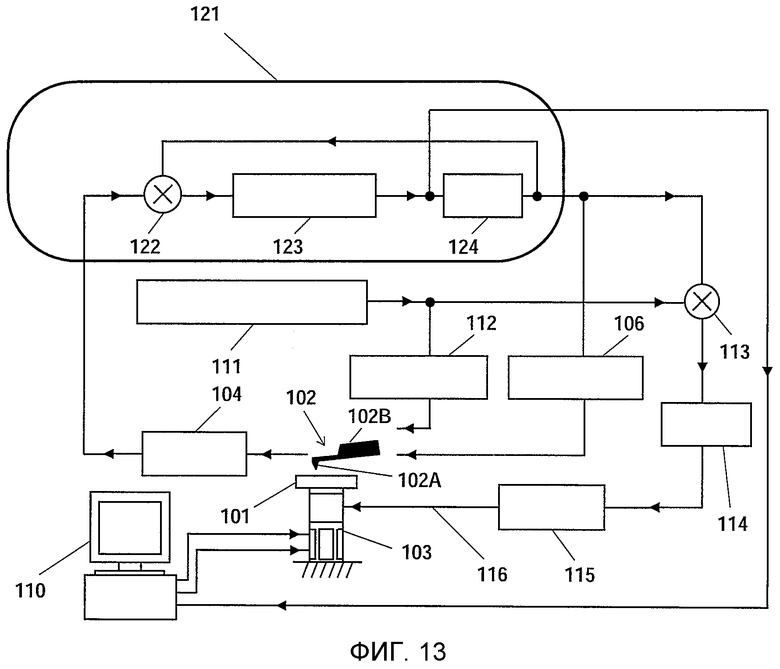
Фиг.13 - структурная схема устройства АСМ с динамическим режимом, иллюстрирующая шестой вариант осуществления настоящего изобретения;
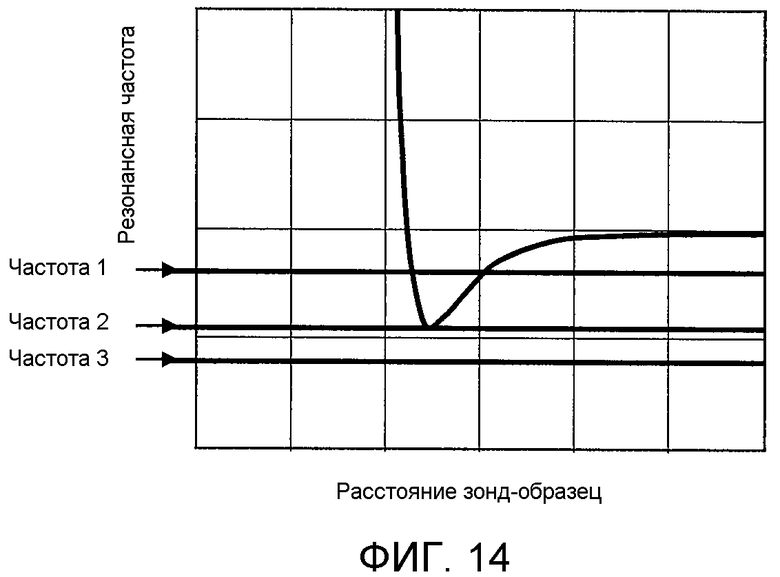
Фиг.14 - иллюстрация взаимосвязи между расстоянием зонд-образец и резонансной частотой в устройстве АСМ с динамическим режимом согласно настоящему изобретению; и
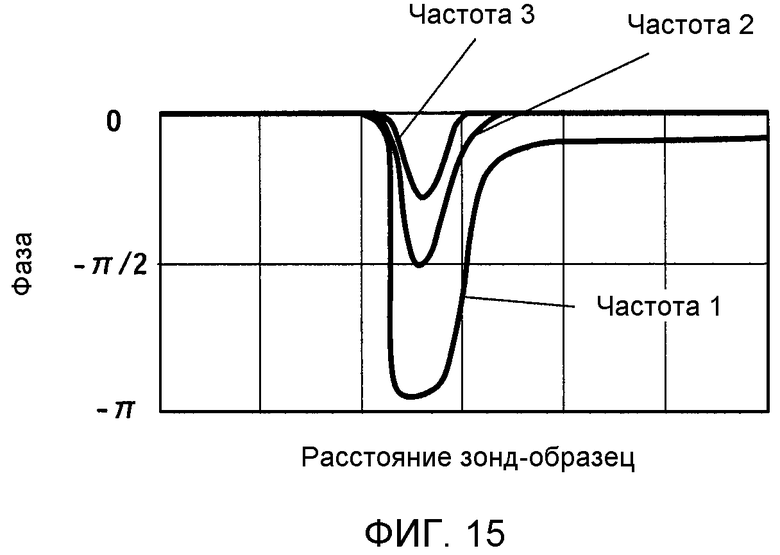
Фиг.15 - иллюстрация взаимосвязи между расстоянием зонд-образец и фазой в устройстве АСМ с динамическим режимом согласно настоящему изобретению.
Описание предпочтительных вариантов осуществления
Устройство АСМ с динамическим режимом, содержащее: сканнер для выполнения трехмерного относительного сканирования консоли и образца; средство для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли; средство для возбуждения колебаний изгиба консоли с резонансной частотой; средство для генерации сигнала переменного тока второй частоты, которая ниже упомянутой частоты колебаний изгиба; средство для модуляции расстояния зонд-образец консоли посредством второй частоты; средство для детектирования флуктуации резонансной частоты; средство для детектирования вибрации консоли; средство для детектирования компонента флуктуации, который содержится в детектированном сигнале, с помощью средства для детектирования флуктуации резонансной частоты, и который синхронизирован с сигналом модуляции расстояния зонд-образец, причем наклон резонансной частоты относительно расстояния зонд-образец получается из мощности и полярности упомянутого компонента флуктуации.
Варианты осуществления
Ниже подробно описаны варианты осуществления настоящего изобретения.
Фиг.4 представляет собой структурную схему устройства АСМ с динамическим режимом согласно настоящему изобретению. На этой фигуре ссылочный номер 1 обозначает образец, 2 обозначает консоль, 2A обозначает зонд консоли 2, 2B обозначает основу консоли 2, 3 обозначает сканнер, который выполняет трехмерное относительное сканирование консоли 2 и образца 1, а 4 обозначает детектор вибрации консоли 2. Упомянутый детектор может быть сконфигурирован так, чтобы вместо вибрации детектировать скорость или смещение, и он может быть замещен механизмом оптического рычага или лазерным допплеровским измерителем. Ссылочный номер 5 обозначает средство для детектирования флуктуации резонансной частоты, а 6 обозначает средство для детектирования компонента флуктуации, который содержится в детектированном сигнале, посредством средства 5 для детектирования флуктуации резонансной частоты, и который синхронизирован с сигналом модуляции расстояния зонд 2A-образец 1 консоли 2. С помощью средства 6 может быть получена связь сигнала 7 наклона резонансной частоты относительно расстояния зонд 2A-образец 1 консоли 2. Ссылочный номер 8 обозначает средство для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли 2, 9 обозначает средство для возбуждения колебания изгиба консоли 2 в ответ на сигнал из средства 8, 10 обозначает средство для генерации сигнала переменного тока второй частоты, а 11 обозначает средство, соединенное со средством 10 для генерации сигнала переменного тока второй частоты, для модуляции расстояния зонд 2A-образец 1 консоли посредством упомянутой второй частоты. Выходной сигнал из средства 10 для генерации сигнала переменного тока второй частоты, в конечном счете, вводится в средство 6 для детектирования компонента флуктуации, синхронизированного с сигналом модуляции.
Так, на Фиг.4 не показаны компьютер, схема управления сканера 3 оси Z и т.п., которые необходимы для АСМ с динамическим режимом.
Средство 8 для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли 2 может включать в себя источник сигнала постоянной частоты, источник сигнала, который медленно следует резонансной частоте консоли 2, колебательный контур с самовозбуждением, который использует консоль 2 как механический осциллятор, и т.п.
Средство 9 для возбуждения колебаний изгиба консоли 2 может включать в себя пьезоэлектрический привод, фототермическое возбуждение, магнитное возбуждение, возбуждение электрическим полем и т.п.
Упомянутая вторая частота может включать в себя либо частоту, которая не связана с упомянутой резонансной частотой консоли, либо частоту, которая находится в моде с другими колебаниями изгиба в меньшей степени, чем в случае вышеупомянутой моды.
Средство 11 для модуляции расстояния зонд-образец посредством второй частоты может включать в себя сканнер 3, средство 9 для возбуждения колебаний изгиба консоли 2 и средство специально для упомянутой второй частоты (пьезоэлектрический привод, фототермическое возбуждение, магнитное возбуждение, возбуждение электрическим полем и т.п.).
Хотя средство 5 для детектирования флуктуации резонансной частоты включает в себя детектирование ЧМ, детектирование ФМ и т.п., такое средство может отсутствовать в зависимости от комбинации со средством 8 для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли 2.
Упомянутое средство 6 для детектирования компонента флуктуации, синхронизированного с сигналом модуляции, включает в себя фазовый компаратор, в состав которого входит блок умножения, фильтр низких частот, синхронный усилитель, цифровая схема и т.п. Подобное средство может быть основано на аналоговой схеме либо цифровой обработке сигнала.
Ниже описаны фундаментальные принципы настоящего изобретения.
Фиг.5 представляет собой диаграмму волн возмущающих сигналов z(t) и изменений f(t) резонансной частоты, где наклон резонансной частоты относительно расстояния зонд-образец имеет положительное (C), отрицательное (A) или нулевое значение (B), согласно устройству АСМ с динамическим режимом по настоящему изобретению.
Используя способ ЧМ, способ ФМ, способ раздельного возбуждения с отслеживанием или другие способы, указанные в описании предшествующего уровня техники, расстояние зонд-образец микроскопически меняется (независимо от колебаний изгиба, необходимых для распознавания резонансной частоты консоли) посредством возмущающего сигнала с гораздо более низкой второй частотой. Расстояние зонд-образец одновременно может подвергаться воздействию как изменения колебаний изгиба, так и изменения возмущающего сигнала. Резонансная частота, которая должна быть детектирована из колебаний изгиба, также варьирует вместе с изменением расстояния зонд-образец из-за возмущающего сигнала, и наклон в графике с Фиг.5 может быть распознан из полярности и высоты частотного компонента, идентичного соответствующему компоненту возмущающего сигнала, которым обусловлено это изменение.
Ниже следует описание преимущества распознавания наклона графика с Фиг.5.
Поскольку система управления обычного устройства АСМ с динамическим режимом устроена так, чтобы стабилизировать наклон резонансной частоты в ту или иную сторону, полярность управления может быть обращена в область вблизи точки минимума, и соответственно, в данном случае такая система не может использоваться. С другой стороны, для образца, погруженного в воду или подвергаемого воздействию пара воды или раствора, слой воды или раствора располагается на поверхности образца, так что градиент силы может попеременно становится положительным и отрицательным, а не оставаться однозначным, как показано на Фиг.2. В таком случае, если желательно изучить область второго положительного наклона в образце, например, обычный способ АСМ с динамическим режимом не может предоставить средство для надежного достижения этой области. Соответственно, способ согласно настоящему изобретению используется для детектирования наклона и изменения полярности системы управления, чтобы стабилизировать управление независимо от положительной или отрицательной величины наклона, в результате чего могут быть решены вышеуказанные проблемы, которые сложно решить по способам существующего уровня техники.
Наклон резонансной частоты относительно расстояния зонд-образец может быть выведен в масштабе реального времени путем перемножения возмущающего сигнала и сигнала, выводимого из средства для детектирования резонансной частоты (формы волн z(t) и f(t) с Фиг.5), и путем их проведения через низкочастотный фильтр.
Сверх того, поскольку результирующее изображение, получаемое путем XY-сканирования при управлении осью Z XYZ-сканера 3 так, чтобы полученный сигнал, указывающий наклон, всегда удерживался на нулевом уровне, представляет "поверхность минимальной резонансной частоты", типы атомов могут быть идентифицированы из их глубины. Согласно этому способу может быть реализовано устройство АСМ, которое может достаточно быстро идентифицировать типы атомов, хотя это может быть медленнее, чем в случае работы обычного устройства АСМ с динамическим режимом.
Ниже приведено описание такого устройства АСМ с динамическим режимом.
Фиг.6 представляет собой структурную схему устройства АСМ с динамическим режимом, иллюстрирующую первый вариант осуществления настоящего изобретения.
В этом первом варианте осуществления контроллер 21 добавляется к средству 6 для детектирования компонента флуктуации, синхронизированного с сигналом модуляции, системы с Фиг.4. Контроллер 21 выводит управляющий сигнал 22 Z-оси, чтобы управлять Z-осью сканнера 3, который может выполнять трехмерное относительное сканирование консоли 2 и образца 1, так чтобы наклон резонансной частоты относительно расстояния зонд-образец становился равным нулю. На Фиг.6 также не показан компьютер, который необходим для устройства АСМ с динамическим режимом.
Фиг.7 представляет собой иллюстрацию временного изменения расстояния зонд-образец в устройстве АСМ с динамическим режимом согласно настоящему изобретению.
Так, временное изменение расстояния зонд-образец показано для случая, когда частота вторичной моды колебаний изгиба используется как частота в моде с колебаниями изгиба, и частота первичной моды колебаний изгиба используется как вторая частота. Этот пример, по меньшей мере, проиллюстрирован для случая, когда вторичная вибрация генерируется посредством вибрации с самовозбуждением.
Фиг.7(a) иллюстрирует временное изменение расстояния зонд-образец, когда консоль одновременно возбуждается посредством частот первичной и вторичной мод колебаний изгиба. Фиг.7(b) иллюстрирует компонент первичной моды колебаний изгиба и форму первичной моды колебаний изгиба, а Фиг.7(c) иллюстрирует компонент вторичной моды колебаний изгиба и форму вторичной моды колебаний изгиба.
На этой фигуре частота вибрации вторичной моды вибрации с Фиг.7(c) временно изменяется, поскольку упомянутое расстояние модулируется посредством компонента первичной моды вибрации, показанного на Фиг.7(b).
Фиг.8 представляет собой структурную схему устройства АСМ с динамическим режимом, иллюстрирующую второй вариант осуществления настоящего изобретения. Фиг.9 представляет собой диаграмму волн вибрации и наклонов резонансной частоты, где наклон резонансной частоты относительно расстояния зонд-образец имеет положительное (C), отрицательное (A) или нулевое значение (B), согласно устройству АСМ с динамическим режимом по настоящему изобретению.
На Фиг.9 ссылочный номер 101 обозначает образец, 102 обозначает консоль, 102A обозначает зонд консоли 102, 102B обозначает основу консоли 102, 3 обозначает сканнер, который может выполнять трехмерное относительное сканирование консоли 102 и образца 101, а 104 обозначает детектор вибрации консоли 2. Упомянутый детектор может быть сконфигурирован так, чтобы вместо вибрации детектировать скорость или смещение, и он может быть замещен механизмом оптического рычага или лазерным допплеровским измерителем. Ссылочный номер 105 обозначает колебательный контур с самовозбуждением для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли 102, причем этот колебательный контур 105 с самовозбуждением состоит из полосового фильтра 105A и схемы 105B формирования волны. Этот колебательный контур 105 с самовозбуждением соединен со средством 106 для возбуждения колебаний изгиба консоли 102, и вывод из средства 106 для возбуждения колебаний изгиба консоли 102 подается на консоль 102. Этот колебательный контур 105 с самовозбуждением также соединен с первым фазовым компаратором 107. Этот первый фазовый компаратор 107 соединен с контурным фильтром 108, и вывод из этого контурного фильтра 108 вводится в первый фазовый компаратор 107 через генератор 109, управляемый напряжением (ГУН). То есть, они функционируют как Фазовая Автоматическая Подстройка Частоты (ФАПЧ) для детектирования ФМ. Ссылочный номер 110 обозначает генератор сигнала XY-сканирования.
В добавление предоставлено второе средство 111 генерации частоты, причем выходной сигнал из второго средства 111 генерации частоты вводится в средство 112 для модуляции расстояния зонд 102A-образец 101 консоли 102 посредством второй частоты, и вывод из средства 112 для модуляции расстояния зонд 102A-образец 101 консоли 102 посредством второй частоты подается на консоль 102.
Сверх того, выходной сигнал из второго средства 111 генерации частоты вводится во второй фазовый компаратор 113 вместе с выходным сигналом из контурного фильтра 108, так что детектируется фазовая разность. Выходной сигнал из второго фазового компаратора 113 вводится в фильтр 114 низких частот. Выходной сигнал из фильтра 114 низких частот вводится в контроллер 115, и выходной сигнал из контроллера 115 служит как управляющий сигнал 116 Z-оси, чтобы управлять Z-осью сканнера 103. На Фиг.8 ссылочный номер 117 обозначает вывод из контурного фильтра 108, 118 обозначает второй компонент частоты, а 119 обозначает вывод из второго фазового компаратора 113.
Так, иллюстративные выходные сигналы в трех точках A, B и C резонансной частоты относительно расстояния (z) зонд-образец показаны на Фиг.9. На этой фигуре линия a обозначает форму волны вибрации как выходной сигнал из детектора 104 вибрации, а линия b обозначает "сигнал, указывающий наклон резонансной частоты относительно расстояния зонд-образец" как вывод из фильтра 114 низких частот.
Контроллер 115 управляет Z-осью сканнера 103, чтобы регулировать расстояние зонд-образец для достижения состояния как в точке B с Фиг.9. Следовательно, в состоянии, когда действует управление контроллером 115, вывод из контурного фильтра 108 выражает минимальное значение резонансной частоты. Генератор 110 сигнала XY-сканирования предоставляет в сканнер 103 сигнал сканирования по XY-оси, и выходная величина контурного фильтра 108 по каждой паре координат XY записывается и отображается, в результате чего выводится изображение XY-распределения минимальной резонансной частоты. Результирующее изобретение представляет распределение типов атомов, как описано в Непатентном Документе 1.
Во втором варианте осуществления частота в моде с колебаниями изгиба низшего порядка используется как вторая частота, которая отличается от частоты в моде с колебаниями изгиба.
Наряду с тем, что способы детектирования ЧМ включают в себя различные способы, такие как детектирование задержки, прямоугольное детектирование и ФАПЧ, ниже приведено описание детектирования ФАПЧ. Присутствует управляющий контур, который поддерживает минимальную величину резонансной частоты посредством управления Z-оси с помощью управляющего сигнала 116 Z-оси из контроллера 115.
Благодаря такой конфигурации, использование моды вибрации консоли 102 позволяет реализовывать эффективную вибрацию в силу усиливающего эффекта амплитуды.
Фиг.10 представляет собой структурную схему устройства АСМ с динамическим режимом, иллюстрирующую третий вариант осуществления настоящего изобретения.
В этом третьем варианте осуществления второе средство генерации частоты также использует колебательный контур 111' с самовозбуждением, состоящий из полосового фильтра 111A и схемы 111B формирования волны. Существует множество различных вариаций принципа схемы детектирования, и здесь проиллюстрирован лишь один пример.
Фиг.11 представляет собой структурную схему устройства АСМ с динамическим режимом, иллюстрирующую четвертый вариант осуществления настоящего изобретения.
В этом четвертом варианте осуществления вывод 120 детектирования ФМ, то есть вывод из первого фазового компаратора 107, вводится во второй фазовый компаратор 113.
Упомянутый четвертый вариант осуществления представляет собой пример, в котором используется детектирование ФМ посредством ФАПЧ. По существу, сигнал ЧМ также представляет собой сигнал ФМ. В частности, детектирование ФАПЧ не может быть выполнено, если частота модуляции слишком высока. В таком случае сигнал детектирования ФМ, содержащийся в выводе из фазового компаратора 107 ФАПЧ, может быть использован вместо сигнала детектирования ЧМ.
Например, если частота колебательного контура 105 с самовозбуждением, который генерирует сигнал переменного тока резонансной частоты в моде с колебаниями изгиба консоли, установлен равной частоте вторичной моде изгиба консоли 102, и частота второго средства 111 генерации частоты, которое генерирует сигнал переменного тока второй частоты, которая ниже колебаний изгиба, установлена равной частоте первичной моды изгиба консоли 102, то частота модуляции сигнала ЧМ, который должен быть детектирован, будет лежать в пределах от одной шестой до одной седьмой несущей частоты, что осложняет детектирование ЧМ посредством ФАПЧ.
Так, вывод 117' низкоскоростного детектирования ЧМ выводит частоту точки минимума резонансной частоты.
Фиг.12 представляет собой структурную схему устройства АСМ с динамическим режимом, иллюстрирующую пятый вариант осуществления настоящего изобретения.
В этом пятом варианте осуществления "вторая частота" из второго средства 111 генерации частоты с Фиг.11 также генерируется посредством колебательного контура 111' с самовозбуждением, состоящего из полосного фильтра 111A и схемы 111B формирования волны. Этот вариант осуществления иллюстрирует конкретную конфигурацию в случае, когда используются две моды консоли 102, как показано в четвертом варианте осуществления.
Фиг.13 представляет собой структурную схему устройства АСМ с динамическим режимом, иллюстрирующую шестой вариант осуществления настоящего изобретения.
На этой фигуре вывод из детектора 104 вибрации консоли 102 управляется таким образом, чтобы медленно следовать резонансной частоте источника 121 сигнала переменного тока, состоящего из фазового компаратора 122, контурного фильтра 123 и ГУН 124. Здесь термин "медленно" означает со скоростью, при которой вывод не реагирует на флуктуации резонансной частоты, вызываемые модуляцией расстояния посредством второй частоты и второго средства 111 генерации частоты.
Хотя в шестом варианте осуществления выполняется управление Z-оси, как показано на Фиг.4, это управление Z-оси может быть опущено.
Фиг.14 представляет собой иллюстрацию взаимосвязи между расстоянием зонд-образец и резонансной частотой в устройстве АСМ с динамическим режимом согласно настоящему изобретению.
Фиг.15 представляет собой иллюстрацию взаимосвязи между расстоянием зонд-образец и фазой в устройстве АСМ с динамическим режимом согласно настоящему изобретению.
В вышеупомянутом шестом варианте осуществления изменение резонансной частоты может быть детектировано с использованием фазы. Фиг.15 иллюстрирует фазы из силового ввода для возбуждение вывода скорости, когда консоль возбуждается на фиксированной частоте (частоты 1, 2 и 3 с Фиг.14). Таким образом, фаза меняется, когда меняется расстояние зонд-образец. Хотя этот график фазы искажен больше, чем график резонансной частоты, наклон ориентирован в том же направлении. Более того, поскольку фаза становится нулевой на расстоянии, где резонансная частота имеет минимальное значение, флуктуация резонансной частоты может быть детектирована с использованием фазы.
Тем не менее лучше управлять частотой возбуждения так, чтобы медленно следовать резонансной частоте, поскольку амплитуда консоли сужается, когда резонансная частота слишком удаляется от частоты возбуждения, в результате чего получаются нежелательные значения отношения сигнала к шуму.
Полезно использовать фазу, когда величина Q консоли имеет низкое значение. Хотя механическая величина Q консоли, погруженной в воду, может сократиться до 10 или ниже, или консоль может остановиться в случае вибрации с самовозбуждением, в способе этого варианта осуществления применяется принудительная вибрация, так что консоль не остановит свои колебания. В добавление, поскольку величина Q имеет низкое значение, амплитуда существенно не уменьшается, когда частота возбуждения в той или иной степени смещена от резонансной частоты.
Настоящее изобретение предоставляет возможность идентификации элементов с атомным разрешением путем сканирования электронной микроскопии так же просто, как при получении топографических изображений, составных изображений или изображений рентгеновской фотоэлектронной спектроскопии. Таким образом, предоставляется возможность существенно сократить объем информации образца, который требуется получить посредством сканирующей электронной микроскопии.
В добавление, настоящее изобретение применимо к вакуумному окружению, а также газовому или жидкостному окружению, и оно позволяет получать изображения динамического изменения поверхности твердого вещества в жидкости, между тем распознавая соответствующие элементы с высоким разрешением. Более того, настоящее изобретение может рассматриваться как в высокой степени инновационное, поскольку его принципы могут распространяться на область науки поверхности и инженерии поверхности, а также наноинженерии, биологического формирования изображений высокого разрешения и т.п.
Более того, некоторые элементы, которые формируют устройство АСМ с динамическим режимом, могут быть реализованы несколькими другими способами, и вышеописанные варианты осуществления раскрывают лишь типовые примеры.
Настоящее изобретение не должно ограничиваться описанными в настоящем документе вариантами осуществления, и в рамках сущности настоящего изобретения возможны многочисленные вариации. Эти вариации не должны исключаться из объема настоящего изобретения.
Согласно настоящему изобретению может быть предоставлена система автоматического управления, которая может автоматически получать расстояние зонд-образец, и атомы на поверхности образца могут быть идентифицированы с высокой скоростью. В частности, может быть получен наклон резонансной частоты относительно расстояния зонд-образец. Сверх того, расстояние зонд-образец может автоматически регулироваться так, чтобы наклон резонансной частоты относительно расстояния зонд-образец становился равным нулю, чтобы быстро идентифицировать виды атомов.
Применяемость в производстве
Устройство АСМ с динамическим режимом согласно настоящему изобретению применимо в области атомно-силовой микроскопии, микроскопии со сканирующим зондом, анализа поверхности, науки поверхности, инженерии поверхности, наноинженерии, нанообработки, биологического формирования изображений с высоким разрешением и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2003 |
|
RU2334214C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ПОЛУКОНТАКТНОГО РЕЖИМА С ФИКСИРОВАННЫМ ПИКОМ СИЛЫ ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ СВОЙСТВ ОБРАЗЦА | 2011 |
|
RU2571446C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛУЧШЕННОГО НАНОСПЕКТРОСКОПИЧЕСКОГО СКАНИРОВАНИЯ | 2005 |
|
RU2378627C2 |
| ЗОНД ДЛЯ АТОМНОГО СИЛОВОГО МИКРОСКОПА | 2004 |
|
RU2356110C2 |
| УНИВЕРСАЛЬНЫЙ ПОЛНОСТЬЮ ОПТИЧЕСКИЙ ЛОГИЧЕСКИЙ ЭЛЕМЕНТ | 2021 |
|
RU2756257C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ НАНОВИБРАЦИЙ ПОВЕРХНОСТИ | 2011 |
|
RU2461803C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА И СПОСОБ ИЗМЕРЕНИЯ МНОЖЕСТВЕННЫХ ПАРАМЕТРОВ ТУРБОМАШИННОЙ СИСТЕМЫ | 2009 |
|
RU2513646C2 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ РАДИАЦИОННОЙ ТЕРАПИИ ДЛЯ ОБЛУЧЕНИЯ СУБЪЕКТА | 1991 |
|
RU2091093C1 |
| СПОСОБЫ ИЗМЕРЕНИЯ СВОЙСТВ МНОГОФАЗНЫХ СМЕСЕЙ НЕФТЬ-ВОДА-ГАЗ | 2014 |
|
RU2659584C2 |
| СВЕДЕНИЕ К МИНИМУМУ ДИНАМИЧЕСКИХ НАГРУЗОК НА КОНСТРУКЦИЮ САМОЛЕТА | 2007 |
|
RU2401219C2 |
Устройство АСМ с динамическим режимом содержит сканнер 3 для выполнения трехмерного относительного сканирования консоли 2 и образца 1; средство 8 для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли 2; средство 9 для возбуждения колебаний изгиба консоли 2 с резонансной частотой; средство 10 для генерации сигнала переменного тока второй частоты, которая ниже упомянутой частоты колебаний изгиба; средство 11 для модуляции расстояния зонд 2А - образец 1 консоли 2 посредством второй частоты; средство 5 для детектирования флуктуации резонансной частоты; средство 4 для детектирования вибрации консоли; средство 6 для детектирования компонента флуктуации, который содержится в детектированном сигнале, с помощью средства 5 для детектирования флуктуации резонансной частоты, и который синхронизирован с сигналом модуляции расстояния зонд 2А - образец 1. Наклон резонансной частоты относительно расстояния зонд 2А - образец 1 получается из мощности и полярности упомянутого компонента флуктуации. Технический результат - повышение скорости идентификации атомов поверхности. 5 з.п. ф-лы, 15 ил.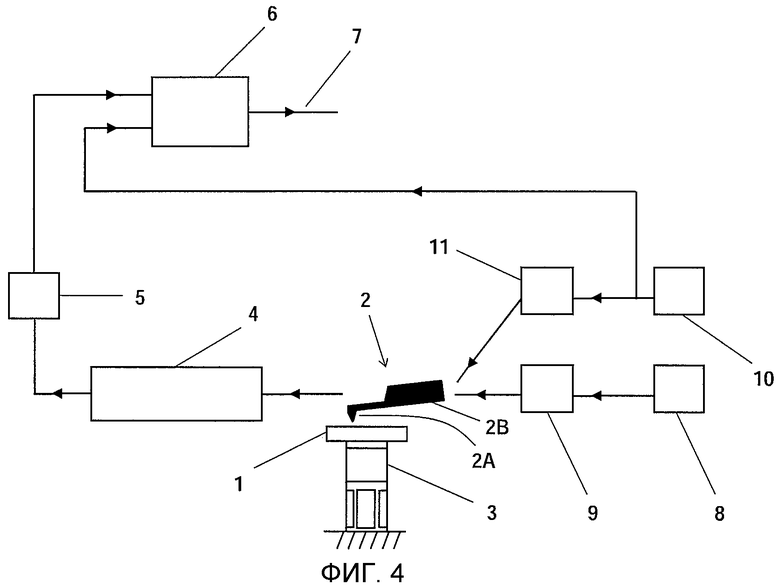
1. Устройство АСМ с динамическим режимом, содержащее:
(a) сканнер для выполнения трехмерного относительного сканирования консоли и образца;
(b) средство для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли;
(c) средство для возбуждения колебаний изгиба консоли с резонансной частотой;
(d) средство для генерации сигнала переменного тока второй частоты, которая ниже упомянутой частоты колебаний изгиба;
(e) средство для модуляции расстояния зонд - образец консоли посредством второй частоты;
(f) средство для детектирования флуктуации резонансной частоты;
(g) средство для детектирования вибрации консоли и
(h) средство для детектирования компонента флуктуации, который содержится в детектированном сигнале с помощью средства для детектирования флуктуации резонансной частоты и который синхронизирован с сигналом модуляции расстояния зонд - образец;
(i) причем наклон резонансной частоты относительно расстояния зонд - образец получается из мощности и полярности упомянутого компонента флуктуации.
2. Устройство АСМ с динамическим режимом по п.1, в котором расстояние зонд - образец автоматически управляется таким образом, чтобы наклон резонансной частоты относительно расстояния зонд - образец становился равным нулю.
3. Устройство АСМ с динамическим режимом по п.1 или 2, в котором частота в моде с колебаниями изгиба более низкого порядка используется как вторая частота, которая отличается от упомянутой частоты в моде с колебаниями изгиба.
4. Устройство АСМ с динамическим режимом по п.1 или 2, в котором колебательный контур с самовозбуждением, который генерирует колебания на упомянутой резонансной частоте, сконфигурирован как средство для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли, и детектирование частоты используется как средство для детектирования флуктуации резонансной частоты.
5. Устройство АСМ с динамическим режимом по п.1 или 2, в котором колебательный контур с самовозбуждением, который генерирует колебания на упомянутой резонансной частоте, сконфигурирован как средство для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли, и детектирование фазы используется как средство для детектирования флуктуации резонансной частоты.
6. Устройство АСМ с динамическим режимом по п.1 или 2, в котором источник сигнала для генерации сигнала переменного тока некоторой частоты, которая имеет постоянное значение в диапазоне резонансной частоты упомянутого режима или которая управляется таким образом, чтобы медленно следовать резонансной частоте упомянутого режима, используется как средство для генерации сигнала переменного тока резонансной частоты в моде с колебаниями изгиба консоли, и средство для детектирования флуктуации этой резонансной частоты конфигурируется путем детектирования фазы смещения или скорости консоли относительно сигнала.
| WO 2008029562 A1, 13.03.2008 | |||
| EP 1360538 B1, 10.11.2004 | |||
| Устройство для электрофореза | 1977 |
|
SU839312A1 |
| EP 1519388 B1, 16.08.2006. | |||

