Настоящее изобретение относится к сканирующим зондовым микроскопам и к способу сканирования таких микроскопов.
Сканирующая зондовая микроскопия как область техники появилась в 1981 году с разработкой сканирующего туннельного микроскопа. С того времени было разработано множество разнообразных зондовых микроскопов, но они все основаны на одном и том же фундаментальном принципе работы: нанометровым зондом механически сканируют по поверхности образца для получения «карты взаимодействия» пространства данного образца. Каждый из различных типов сканирующего зондового микроскопа (СЗМ) характеризуется природой локального зонда и его взаимодействием с поверхностью образца.
В некоторых методах зондирования, таких как сканирующая оптическая микроскопия ближнего поля (СОМБП) и фотонная сканирующая туннельная микроскопия (ФСТМ), детектируют фотоны, генерируемые в результате взаимодействия зонда с освещаемым образцом. Другие методы основываются на обнаружении изменений в интенсивности взаимодействия зонд-образец. Принадлежащие к этой последней группе методики известны под общим названием сканирующей силовой микроскопии (ССМ). Помимо многих других, силы взаимодействия могут представлять собой, например, магнитную силу (напряженность магнитного поля), усилие сдвига или тепловую силу.
Атомно-силовая микроскопия (АСМ) представляет собой наиболее часто используемую методику сканирующей зондовой микроскопии. В этом случае зонд представляет собой заостренный кончик (иглу) на конце так называемого «кантилевера» (консоли), который(-ая) изгибается в качестве отклика на усилие между иглой и образцом. Для измерения изгиба кантилевера обычно используют методику оптического рычага (оптического затвора). Поскольку кантилевер подчиняется закону Гука для малых смещений, то можно вывести силу взаимодействия между иглой и образцом. Атомно-силовой микроскоп (АСМ) обычно работает в одном из двух режимов. В режиме постоянной силы (взаимодействия) обратная связь позволяет позиционирующему пьезоэлектрическому приводу перемещать образец (или иглу) вниз или вверх в качестве отклика на любое обнаруживаемое изменение в силе взаимодействия. Таким образом, сила взаимодействия может поддерживаться относительно стабильной, и при этом получают довольно достоверное топографическое изображение образца. В альтернативном варианте, АСМ-микроскоп может работать в режиме постоянной высоты. Тогда топографические изменения будут неотличимыми от изменений силы взаимодействия, и поэтому этот режим работы наиболее целесообразен для получения изображений очень плоских образцов с высокой степенью разрешения.
Недостаток всех методов сканирующей зондовой микроскопии заключается во времени сбора данных. Обычно изображение состоит из 256 строк, каждая из которых состоит из 256 точек (пикселей). На полное сканирование изображения, выполняемое обязательно небольшим зондом, уходит много времени. В настоящее время становится все более широко используемой методика локального зонда для считывания и записи данных вне λ/2-ограничения обычных оптических носителей данных, и при этом становится все более очевидным, что скорость обработки данных ограничивается той скоростью, с которой информация может быть записана и считана. Помимо этого, многие научные, промышленные и физиологические процессы протекают за такие периоды по шкале времени, которые являются слишком короткими для того, чтобы за ними можно было уследить с помощью существующих в настоящее время методов локального зонда. Поэтому существует необходимость в улучшении времен сбора изображения в сканирующем зондовом микроскопе.
Задача настоящего изобретения заключается в том, чтобы создать систему, способную более быстро собирать данные о взаимодействии образец-зонд, и за счет этого повысить скорости считывания или записи информации и сделать большее число научных, промышленных и физиологических процессов доступными для исследования в реальном масштабе времени с помощью сканирующей зондовой микроскопии.
В настоящем изобретении предложен сканирующий зондовый микроскоп для получения изображения образца в соответствии со взаимодействием между образом и зондом, выполненный с возможностью осуществления в ходе работы сканирования поверхности образца и содержащий: средство привода, выполненное с возможностью обеспечения относительного движения между зондом и поверхностью образца и способное приводить образец и зонд в непосредственную близость друг с другом, достаточную для установления между ними детектируемого взаимодействия; средство придания колебаний либо зонду, либо образцу; механизм детектирования зонда, выполненный с возможностью измерения по меньшей мере одного параметра, характеризующего интенсивность взаимодействия между зондом и образцом; и механизм обратной связи, выполненный с возможностью обеспечения регулирования отделяющего зонд и образец расстояния за счет приведения в действие средства привода в качестве отклика на изменение среднего значения одного из упомянутых параметров относительно предварительно заданного значения, отличающийся тем, что средство придания колебаний обеспечивает относительное колебательное движение зонда по занятой образцом поверхности так, что зонд выполняет по существу линейную развертку поверхности образца, причем во время сканирования поверхности образца участок сканирования охватывается за счет упорядоченного расположения строк сканирования, каждая из которых снимается при колебании либо зонда, либо образца на его резонансной частоте или около его резонансной частоты, так что двойная амплитуда колебания равна максимальной длине строки сканирования, а их упорядоченное расположение обеспечивается действием средства привода.
Объект, колеблющийся вблизи резонанса или в резонансе, демонстрирует высокостабильное и, нередко, быстрое движение. Каждая строка сканирования снимается в виде непрерывного (аналогового) изображения по мере того как либо зонд колеблется по поверхности образца, либо поверхность колеблется под зондом. При одновременном обеспечении относительного поступательного движения между зондом и поверхностью образца последовательные строки сканирования будут собирать (снимать) информацию с разных частей поверхности. После охвата данного участка поверхности информация о строках сканирования может быть собрана и воспроизведена (восстановлена) с учетом соответствующих смещений с формированием изображения двухмерного участка сканирования. Как указано выше, резонансное колебательное движение обладает очень высокой степенью стабильности. Таким образом, независимо от того, выполняется ли это движение зондом или образцом, шум, сказывающийся на снятии изображения, будет сниженным. Механизм обратной связи служит для поддержания, в некоторой степени, высоты зонда над упомянутой поверхностью путем выполнения регулирующих воздействий (внесения корректировок) в соответствии со средней интенсивностью взаимодействия между зондом и образцом. Поэтому изменения измеряемого параметра в масштабе времени одного колебания будут составлять отображение «взаимодействия», и они будут интерпретироваться как возникающие в результате действительных особенностей поверхности. Это обеспечивает гораздо более быструю технологию, с помощью которой собирают информацию отображения взаимодействия, чем это возможно согласно известному уровню техники.
Для охвата участков сканирования можно использовать разные ориентации колебания и относительного поступательного движения зонда/поверхности. Если ось колебания стационарна, то линейное поступательное движение может быть применено в направлении, которое является по существу ортогональным размаху колебания, тем самым задавая по существу прямоугольный участок сканирования. Если относительное поступательное движение является непрерывным, то участок сканирования быстро охватывается единственной сплошной зигзагообразной линией. Альтернативно, можно создать круговое упорядоченное расположение (линий) за счет обеспечения относительного вращения зонда и образца. Помимо этого, колебание и поступательное движение могут быть выполнены таким образом, чтобы зонд описывал относительно поверхности фигуры Лиссажу.
Характеризующим взаимодействие параметром предпочтительно является электрическая емкость границы раздела между зондом и образцом, и поэтому предпочтительным является также металлический зонд. Эта технология очень целесообразна для составления карт распределений зарядов в полупроводниковых материалах. Улучшенная скорость сканирования, которой способствует настоящее изобретение, делает процессы внутри полупроводника доступными для исследований с помощью зондовой микроскопии в реальном масштабе времени.
Альтернативно, характеризующим взаимодействие параметром может быть амплитуда колебания. Амплитуда колебания также может быть контролируемым (отслеживаемым) параметром, на котором основывается механизм обратной связи.
Механизм детектирования зонда предпочтительно содержит генератор сигнала модуляции, выполненный с возможностью приложения модулирующего напряжения к границе раздела между зондом и образцом для модулирования ее характеристик и, тем самым, воздействия на ее электрическую емкость; резонатор, выполненный с возможностью создания резонансного электрического поля в цепи, включающей в себя зонд и образец; и детектор, выполненный с возможностью измерения резонансной частоты электрического поля и, тем самым, обеспечивающий возможность измерения изменений электрической емкости границы раздела при приложении модулирующего напряжения. Преимущество этого варианта воплощения изобретения заключается в том, что он обеспечивает чрезвычайно чувствительную технологию, с помощью которой измеряют электрическую емкость в сканирующем емкостном микроскопе.
Альтернативно, микроскоп может представлять собой магнитно-силовой микроскоп с зондом, приспособленным для взаимодействия с магнитным полем, и с механизмом детектирования зонда, выполненным с возможностью измерения параметра, характеризующего магнитное взаимодействие между зондом и образцом.
В качестве дополнительного альтернативного варианта зонд может содержать кантилевер и исполнительный механизм привода, выполненный с возможностью приведения кантилевера в «обрабатывающий» («надрезающий») режим. Тогда характеризующим интенсивность взаимодействия параметром может быть изгиб кантилевера по мере того, как он обрабатывает образец (делает на нем надрезы). Альтернативно, этим параметром может быть амплитуда колебания. Эти варианты воплощения обеспечивают реализацию изобретения в атомно-силовом микроскопе, который, в свою очередь, делает доступными для более быстрого сканирования те варианты применения, в которых обычно используют АСМ.
В АСМ-исполнении одним из упомянутых, характеризующих интенсивность взаимодействия параметров, который измеряется механизмом детектирования зонда и используется механизмом обратной связи, является изгиб кантилевера при введении кончика зонда (иглы) в контакт с поверхностью. Механизм детектирования зонда может быть выполнен с возможностью измерения изгиба зонда для того, чтобы обеспечить как информацию изображения, так и информацию обратной связи. Как вариант, для обеспечения информации изображения может быть использован другой параметр, характеризующий интенсивность взаимодействия зонд-образец. Альтернативно, механизм детектирования зонда может содержать два компонента: первый, выполненный с возможностью измерения одной характеристики взаимодействия, например электрической емкости, между зондом и образцом; и второй, соединенный с механизмом обратной связи и выполненный с возможностью измерения изгиба зонда.
Колеблется либо зонд, либо образец. Причем зонд может быть установлен вертикально или горизонтально, либо, несомненно, под промежуточным углом при условии, что любое колебание приводит в результате к выполнению зондом по существу линейной развертки поверхности образца. Если колеблется образец, то этого предпочтительным образом достигают путем установки образца на эталонный генератор стабильной частоты. При этом могут возникнуть проблемы со связью между резонансными режимами, так как образец (или зонд) одновременно колеблется и поступательно движется. Эталонный генератор стабильной частоты сконструирован с высокой механической анизотропией, которая затрудняет такую связь. Это улучшает стабильность сканирования. При условии, что они обладают аналогичной анизотропией, могут быть также использованы альтернативные в отношении эталонного генератора стабильной частоты варианты, например пьезоэлектрический биморфный элемент (биморфный пьезоэлемент). Зонд также можно колебать эталонным генератором стабильной частоты или биморфным пьезоэлементом.
Механизм обратной связи предпочтительно действует с постоянной времени, которая является большей, чем один цикл колебания зонда, и значительно меньшей, чем совокупное время, нужное для осуществления сканирования.
Согласно второму аспекту настоящего изобретения предложен способ быстрого сбора данных изображения с участка сканирования образца с нанометровыми особенностями, включающий в себя этапы, на которых: а) перемещают зонд с кончиком субнанометровых размеров в непосредственную близость с образцом для того, чтобы обеспечить возможность установления взаимодействия между зондом и образцом; б) осуществляют колебание либо зонда по поверхности образца на его резонансной частоте или около его резонансной частоты, либо образца под зондом на его резонансной частоте или около его резонансной частоты, причем колебание является таким, что зонд выполняет по существу линейную развертку поверхности образца, одновременно обеспечивая относительное движение между зондом и поверхностью, так что упорядоченное расположение строк сканирования, максимальная длина которых равна двойной амплитуде колебания, охватывает участок сканирования; в) измеряют параметр, характеризующий интенсивность взаимодействия; г) контролируют параметр, измеряемый на этапе (в), или второй параметр, который также характеризует взаимодействие между зондом и образцом, и, если значение контролируемого параметра падает ниже или поднимается выше предварительно заданного значения, регулируют отделяющее зонд и образец расстояние с тем, чтобы привести значение контролируемого параметра обратно к заданному значению; и д) обрабатывают измерения, снятые на этапе (в), для извлечения информации, относящейся к нанометровой структуре образца.
Согласно третьему аспекту вариант воплощения настоящего изобретения в виде АСМ может быть использован не для получения изображения поверхности образца, а для оказания воздействия на поверхность образца в месте нахождения зонда. Поэтому на образце может быть сохранена информация в виде локализованного изменения свойств поверхности, что обеспечивает возможность применения настоящего изобретения в технологии нанолитографии.
Таким образом, в настоящем изобретении также предложен сканирующий зондовый микроскоп для записи информации на образце посредством взаимодействия между образцом и зондом кантилевера АСМ, содержащий: средство привода, выполненное с возможностью обеспечения относительного движения между зондом и поверхностью образца и способное приводить образец и зонд в непосредственную близость друг с другом; средство придания колебаний либо зонду, либо образцу; механизм записи зондом, выполненный с возможностью прерывистого изменения, в более коротком масштабе времени, чем один период колебания зонда или образца, интенсивности взаимодействия между зондом и образцом и, тем самым, прерывистого изменения свойства поверхности образца в месте расположения зонда, отличающийся тем, что средство придания колебаний обеспечивает относительное колебательное движение зонда по занятой образцом поверхности так, что зонд выполняет по существу линейную развертку поверхности образца, при этом микроскоп выполнен с возможностью осуществления в ходе работы записывающего сканирования поверхности образца, причем участок сканирования охватывается за счет упорядоченного расположения строк сканирования, каждая из которых снимается при колебании либо зонда, либо образца на его резонансной частоте или около его резонансной частоты, так что двойная амплитуда колебания равна максимальной длине строки сканирования, а их упорядоченное расположение обеспечивается действием средства привода.
Предпочтительно, такой микроскоп также содержит механизм детектирования зонда, выполненный с возможностью измерения по меньшей мере одного параметра, характеризующего интенсивность взаимодействия между зондом и образцом, и механизм обратной связи, выполненный с возможностью обеспечения регулирования отделяющего зонд и образец расстояния за счет приведения в действие средства привода в качестве отклика на изменение среднего значения одного из упомянутых параметров относительно предварительно заданного значения, причем упомянутое среднее значение берется по временному интервалу, превышающему временной интервал периода колебания зонда или образца.
Варианты воплощения изобретения будут описаны далее только в качестве примеров и со ссылкой на прилагаемые чертежи.
Фиг.1 демонстрирует схематический вариант реализации изобретения в виде сканирующего емкостного микроскопа.
Фиг.2 схематически показывает механизм детектирования зонда, подходящий для использования в микроскопе по Фиг.1.
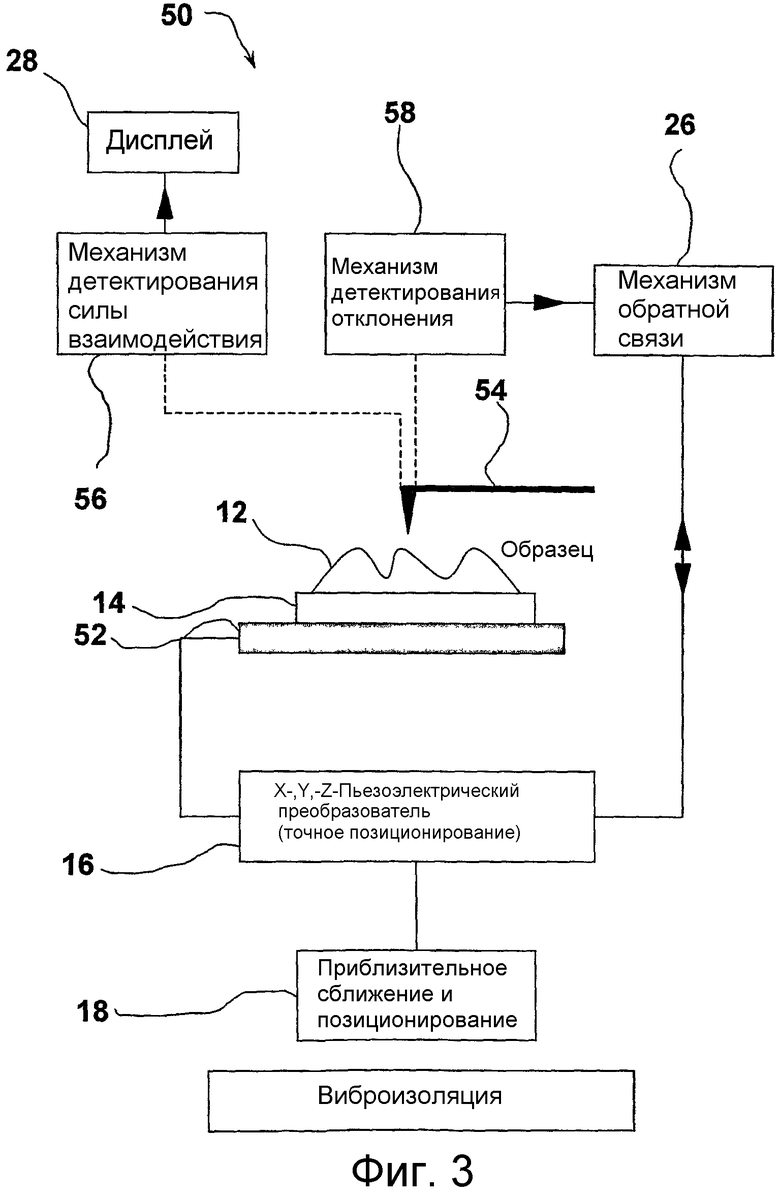
Фиг.3 схематически иллюстрирует альтернативный вариант воплощения изобретения на основе атомно-силового микроскопа.
Фиг.1 иллюстрирует вариант реализации изобретения в виде сканирующего емкостного микроскопа (СЕМ). Известный из уровня техники СЕМ-микроскоп описан в работе Трэна (T.Tran) с соавторами «Емкостной датчик с цептофарадным (10-21) разрешением для сканирующего емкостного микроскопа» [""Zeptof arad" (10-21) resolution capacitance sensor for scanning capacitance microscopy"], Rev. Sci. Inst. 72(6) p.2618 (2001), причем он оказался особо целесообразным при измерении двухмерных профилей носителей (заряда) в полупроводниковых устройствах. Аналогично микроскопу, описанному Трэном с соавторами, показанное на Фиг.1 устройство 10 содержит электрически заземленную пластину 14, которая приспособлена для приема образца 12 и которая соединена с пьезоэлектрическим преобразователем 16 и со средством 18 приблизительного (грубого) привода. Металлический зонд 20 соединен со вторым пьезоэлектрическим средством 22 привода, которое, в противоположность любому средству привода известного из уровня техники СЕМ-микроскопа, выполнено с возможностью придания зонду 20 околорезонансного или резонансного колебания. Либо первый пьезоэлектрический преобразователь 16, либо второй пьезоэлектрический преобразователь 22 приводит зонд 20 и образец 12 в относительное вертикальное движение. В этом варианте воплощения именно пьезоэлектрический преобразователь 16 прикреплен к образцу 12. Устройство содержит механизм 24 детектирования зонда, конкретные конструктивные особенности которого зависят от измеряемой характеристики взаимодействия зонд 20-образец 12, при этом ниже более подробно излагается вариант воплощения, подходящий для использования с СЕМ. Механизм 26 обратной связи выполнен с возможностью приведения в действие первого пьезоэлектрического преобразователя 16 в качестве отклика на сигнал, принимаемый от механизма 24 детектирования зонда, и, таким образом, с возможностью регулирования относительной высоты зонда 20 и образца 12. Собранные данные анализируют и выводят на дисплей 28.
Как обычно в данной области техники, z-осью декартовой системы прямоугольных координат будет взята та, которая является перпендикулярной к плоскости, занятой образцом 12. Таким образом, взаимодействие зонд 20-образец 12 зависит как от положения зонда 20 в плоскости х-у над образцом 12 (того пикселя, изображение которого он получает), так и от высоты зонда над ним.
Перед изложением работы устройства, показанного на Фиг.1, целесообразно пояснить физические основы взаимодействия и измерений и, таким образом, функционирования механизма 24 детектирования зонда. Сканирующий емкостной микроскоп может быть использован для получения изображения нескольких типов образцов, включая биологические образцы (пробы). Однако возникновение и измерение электрической емкости являются наиболее понятными в отношении получения изображений полупроводников. Когда металлический зонд приводят в контакт с полупроводниковым материалом, то выравнивание энергии Ферми в двухзонных структурах приводит в результате к падению электрического потенциала, происходящему на границе раздела. Это падение удаляет носители заряда из граничной области, и при этом формируется обедненный слой. Это явление хорошо известно и является основой диода с барьером Шотки. И именно электрическую емкость в этом обедненном слое (или в барьере Шотки) и измеряют в полупроводниках с помощью СЕМ.
Зонная структура (и тем самым эффективное легирование) биологических материалов является значительно более сложной по сравнению с зонной структурой полупроводников, и поэтому теория обедненного слоя, кратко охарактеризованная выше, как правило не является приемлемой. Считается, что переориентация (или индукция) диполей может быть в биологических образцах тем механизмом, за счет которого появляется электрическая емкость на границе раздела. Однако независимо от фактического механизма факт заключается в том, что электрическая емкость все-таки возникает на границе раздела зонд-образец, и она может быть обнаружена и измерена таким же образом, как и в полупроводниковых материалах - с помощью сканирующего емкостного микроскопа.
Механизм 24 детектирования зонда для использования в СЕМ-варианте воплощения настоящего изобретения показан на Фиг.2. Механизм 24 содержит управляемый напряжением генератор 40, связанный с линией передачи резонатор 42, усилитель 44, детектор 46 пикового напряжения и генератор 48 сигнала модуляции. Генератор 48 сигнала модуляции прилагает к зонду 20 синусоидальное напряжение переменного тока со смещением по постоянному току. Сам образец 12 заземлен через пластину 14, и в результате этого к границе раздела между зондом 20 и образцом 12 прилагается модулирующее напряжение. Это напряжение модулирует ширину обедненного слоя в полупроводниках и, тем самым, электрическую емкость барьера. В биологических образцах модулирующее напряжение оказывает на электрическую емкость аналогичное модулирующее действие, хотя, возможно, и посредством модуляции диэлектрической проницаемости. Для измерения электрической емкости границы раздела в цепи резонатора 42 генератором 40 возбуждается осциллирующее электрическое поле. Резонансная частота этого поля зависит от нагрузки (в данном случае - от пути электрического тока через зонд и образец) на цепь. Резонансный сигнал детектируется в резонаторе 42 и усиливается усилителем 44 перед его передачей в детектор 46 пика. Изменения электрической емкости на границе раздела (и поэтому нагрузки на цепь) проявляются в сдвиге частоты резонансного пика, обнаруживаемого детектором 46 пика. Поскольку сигнал модуляции, вызывающий флуктуации электрической емкости, известен, то определение изменений в положении пика позволяет определить производную электрической емкости на границе раздела по напряжению (dC/dV) на частоте модуляции.
Обращаясь снова к Фиг.1, при снятии изображений с помощью устройства 10 образец 12 сначала приводят в непосредственную близость к зонду 20 с использованием средства 18 приблизительного (грубого) привода. Точные регулировки высоты и исходного стартового положения осуществляют с помощью первого пьезоэлектрического преобразователя 16 привода, при этом механизм 24 детектирования зонда измеряет электрическую емкость, создаваемую в результате взаимодействия зонд 20-образец 12. Как только измеряемая электрическая емкость достигает нужного уровня, начинается растровое сканирование поверхности образца 12. При сканировании зонда 20 по образцу 12 первый пьезоэлектрический преобразователь 16 привода управляет перемещением в направлении по оси y (с точки зрения на Фиг.1 - перпендикулярно странице в нее). Второй пьезоэлектрический привод 22 приводит зонд 20 в околорезонансное колебание относительно оси z в плоскости x-z (т.е. в плоскости Фиг.1). Колебание зонда имеет относительно большую амплитуду, порядка нескольких микрон. В ходе сканирования механизм 24 детектирования зонда непрерывно выполняет считывания электрической емкости, возникающей между зондом 20 и образцом 12.
По мере того как зонд 20 колеблется, снимаются последовательные строки сканирования. Поэтому длина каждой строки будет равна двойной амплитуде колебания, и эта длина будет соответствовать максимальной ширине изображения. Максимальная длина изображения определяется, конечно, тем расстоянием, на которое образец 12 поступательно перемещается в направлении по оси y первым пьезоэлектрическим преобразователем 16 привода. Околорезонансное колебание обеспечивает потенциальную возможность для почти максимальной ширины сканирования, получаемой для данного усилия привода. Посредством этого данные с изображаемого участка снимаются с гораздо более высокой скоростью, чем та, которая достигается с помощью известных из уровня техники сканирующих емкостных микроскопов или любого сканирующего силового микроскопа. Разумеется, максимальная ширина сканирования может быть достигнута в СЕМ в том случае, если зонд колеблется в резонансе.
Механизм 26 обратной связи выполнен с возможностью поддержания средней электрической емкости (усредненной по многим периодам колебания) взаимодействия зонд 20-образец 12 приблизительно постоянной. Для этой цели выходной сигнал детектора 46 пика (Фиг.2) подают в механизм обратной связи. Поэтому, если в какой-либо точке при сканировании наблюдается пониженная средняя электрическая емкость, то это указывает на то, что взаимодействие зонд 20-образец 12 уменьшилось, а, соответственно, разделяющее их расстояние увеличилось. Поэтому механизм 26 обратной связи выполнен с возможностью приведения в действие первого пьезоэлектрического преобразователя 16 таким образом, что он перемещает образец 12 и пластину 14 в направлении к зонду 20. Наоборот, сигнал о повышенной электрической емкости указывает на уменьшение разделяющего зонд 20 и образец 12 расстояния, и тогда образец 12 опускают. На практике средняя электрическая емкость будет изменяться вокруг своего заданного значения. На это изменение влияет целый ряд факторов: перерегулирование при корректировке высоты, тот факт, что постоянная времени контура обратной связи должна превышать период колебания зонда и конечную длительность по времени, которая нужна зонду для того, чтобы отрегулироваться и приспособиться к изменению взаимодействия (время адаптации). Любые изменения электрической емкости в масштабе времени, меньшем, чем период колебания зонда, составляют изображение.
Также является важным, чтобы постоянная времени контура обратной связи, которая должна быть дольше периода колебания зонда, и время отклика (время реакции) зонда были короче времени, нужного для завершения всего сканирования.
Выходной сигнал из механизма 24 детектирования зонда (детектора 46 пика) подается через механизм 26 обратной связи в процессор и на дисплей 28. Для обеспечения возможности обработки цифровых данных снятая строка сканирования может быть искусственно разбита (дискретизирована) на отдельные элементы (пиксели) с помощью процессора.
Разумеется, не является обязательным либо снимать, либо обрабатывать данные изображения по всему участку, охватываемому физическим сканированием зонда-образца. В некоторых вариантах применения предпочтительной может оказаться обработка только данных, собранных в более линейной части размаха колебания зонда. Физический участок сканирования просто ограничивает максимальный участок, который может быть отображен в одном цикле сканирования.
Для максимизации скорости сканирования каждую строку сканирования снимают за полуколебание зонда. Разумеется, лучшее изображение может быть получено с помощью множества колебаний на каждой строке, хотя пошаговое перемещение и остановка пьезоэлектрических преобразователей 16, 22 привода с тем, чтобы предусмотреть множество проходов по одной и той же строке, привело бы к затухающим колебаниям («звону») зонда. При этом также снизилась бы, разумеется, совокупная скорость сканирования. Тем не менее, скорость пьезоэлектрического преобразователя 16 привода образца может быть отрегулирована на медленное перемещение образца, такое как, например, примерно 1Е на цикл колебания. При этой скорости можно будет выполнить что-то подобное интегрированию путем добавления последовательных строк друг к другу с тем, чтобы каждая строка в обработанном изображении стала средней по, скажем, пяти линиям колебания. Повышение отношения сигнал-шум, обеспечиваемое этим «интегрированием», может, в некоторых обстоятельствах, компенсировать ухудшение разрешения.
Хотя данный вариант воплощения изобретения предусматривает наличие пьезоэлектрического преобразователя 16, который обеспечивает линейное движение в направлении по оси y, является совершенно очевидным, что могут быть использованы и многие другие геометрические конфигурации сканирования. При этом единственное требование при получении изображения участка будет заключаться в том, чтобы комбинация поступательного перемещения образца (или, эквивалентно, зонда) и колебание зонда (или, эквивалентно, образца) охватывали (покрывала) весь тот участок, изображение которого необходимо получить. Таким образом, образец можно вращать при одновременном колебании зонда, тем самым осуществляя сканирование, включающее в себя круговой набор строк сканирования, проходящих через центральную точку. Альтернативно, зонд может быть настроен на колебание в двух перпендикулярных направлениях. Тогда, если колебания осуществляют в обоих направлениях вместе, то получится нелинейное колебание, такое как конфигурация цифры восемь. Если затем вращать ось колебания конфигурации цифры восемь, то перемещение зонда охватит участок сканирования в виде набора конфигураций цифры восемь, проходящих через центральную точку.
СЕМ является чрезвычайно пригодным для определения профилей носителей (заряда) в полупроводниковых устройствах. Амплитуда dC/dV (будучи калиброванной) может быть использована для определения локальной концентрации носителей заряда, и ее знак укажет тип носителя. Преимущество более быстрого сканирования, обеспечиваемого настоящим изобретением, делает возможным применение СЕМ-технологии, не в последнюю очередь, для контролирования процессов, идущих внутри полупроводниковых устройств, в реальном времени.
Использование колеблющегося в резонансе зонда для получения изображения поверхности образца с помощью технологий оптической сканирующей зондовой микроскопии (СЗМ) описывается в совместно поданной заявке на патент этого же заявителя с номером публикации WO 02/063368. Согласно одному из описываемых там примеров амплитуду колебания зонда непрерывно контролируют для обеспечения постоянной высоты над поверхностью. Когда зонд приводится в непосредственную близость к образцу, то расстояние или взаимодействие между зондом и образцом может быть измерено несколькими разными способами. Как указано выше в отношении варианта воплощения настоящего изобретения, проиллюстрированного на Фиг.1, возникновение электрической емкости обусловлено электрическим взаимодействием. Еще одним типом взаимодействия является так называемый механизм демпфирования «сдвигающего усилия». Если вертикально установленный зонд колеблется горизонтально по отношению к поверхности образца на частоте, близкой к его резонансной частоте, то взаимодействия поверхность-зонд будут служить для демпфирования (гашения) амплитуды колебания. Обычно считается, что демпфирующий механизм, в условиях окружающей среды, обусловлен ограниченным слоем воды на поверхности образца, но также возможными являются и другие демпфирующие взаимодействия. По мере приближения зонда к поверхности демпфирование усиливается и, соответственно, уменьшается амплитуда колебания.
Альтернативой варианту воплощения изобретения, показанному на Фиг.1, является, следовательно, адаптация механизма 24 детектирования зонда как к непрерывному контролированию амплитуды колебания зонда по мере снятия им строк сканирования, так и к измерению электрической емкости контакта с использованием, как и ранее, резонатора 42 и модулятора 48 напряжения. Амплитуду колебания зонда можно контролировать несколькими известными средствами, например за счет фотоэлектрического (фотогальванического) измерения тени колебания кончика зонда в луче света. Тогда относительное расстояние между зондом 12 и образцом 20 может поддерживаться на основе обратной связи по амплитуде колебания. Если средняя (по некоторому числу строк сканирования) амплитуда снижается ниже заданного значения, то образец 12 должен быть перемещен дальше от зонда 20, а если она превышает такое заданное значение, то образец 12 и зонд 20 нужно сблизить. Этот вариант воплощения изобретения дает возможность для двойного использования резонансных колебаний зонда: для снятия строки сканирования и для поддержания высоты над образцом. В то же время, с образца 12 снимается изображение по электрической емкости.
В этом варианте воплощения изобретения зонд колеблется около резонанса, а не в резонансе, что максимизирует ширину сканирования. Причина этого заключается в том, что имеет место больший отклик в виде изменения амплитуды на сдвиг в положении резонансного пика, как только выходят из резонанса. Поскольку именно это изменение амплитуды измеряется в данном варианте воплощения для получения указания на любое изменение во взаимодействии зонд-образец, то околорезонансное колебание фактически улучшает отношение сигнал-шум.
При использовании двух различных параметров: первого - для измерения взаимодействия зонд-образец, и второго - для контролирования их расстояния друг от друга, изображение взаимодействия будет «абсолютным» изображением, а не относительным. То есть в этом варианте воплощения СЕМ изображение по электрической емкости формируется из абсолютных значений. В предыдущем варианте воплощения, в котором измерение средней электрической емкости используют для управления расстоянием (между зондом и образцом), полученное изображение по электрической емкости представляет собой карту изменений по отношению к этому среднему значению (отличий от этого среднего значения).
Обобщенный механизм 24 детектирования зонда, показанный на Фиг.1, может содержать целый ряд разных инструментов измерения в зависимости от специфики взаимодействия зонд-образец, изображение которого получают в данном конкретном случае.
Альтернативный вариант воплощения СЕМ согласно настоящему изобретению показан на чертеже Фиг.3. Этот вариант воплощения является одним из тех, в которых расстояние зонд-образец регулируют за счет контролирования одного параметра, а взаимодействие измеряют с помощью другого. Это основывается на атомно-силовом микроскопе (АСМ), и специалистам в данной области техники будет очевидной адаптация по основыванию изображения и обратной связи только на одном параметре.
Атомно-силовой микроскоп согласно известному уровню техники, пригодный для получения изображений биологических образцов, описывается в работе Тошио Андо (Toshio Ando) с соавторами «Высокоскоростной атомно-силовой микроскоп для исследования биологических макромолекул» ("A high-speed atomic force microscope for studying biological macromolecules"), Proc. Nat. Acad. Sci., USA 98(22) p.12468-12472 (2001), и это оборудование может быть адаптировано для использования с резонансным сканированием изображения. Значительное (для целей данного изобретения) различие между АСМ и СЕМ заключается в том, что первый использует меньший кантилевер с, как правило интегрированным, исполнительным механизмом привода в качестве зонда, и изгиб такого кантилевера используют для обеспечения характеристики интенсивности взаимодействия.
Фиг.3 показывает АСМ-микроскоп 50, компоненты которого, общие с СЕМ согласно Фиг.1, имеют те же ссылочные обозначения. АСМ-устройство 50 содержит пластину 14, которая приспособлена для размещения образца 12 и которая установлена на одном ответвлении эталонного генератора 52 стабильной частоты. Эталонный генератор 52 стабильной частоты соединен с пьезоэлектрическим преобразователем 16 и средством 18 приблизительного привода. Пьезоэлектрический преобразователь 16 используется для перемещения образца 12 (вместе с пластиной 14 и генератором 52) в трех измерениях: в направлениях х, y и z, пользуясь обозначениями, которые даны в отношении Фиг.1. Средство управления (не показано) эталонным генератором стабильной частоты выполнено с возможностью подачи синусоидального напряжения к эталонному генератору 52 стабильной частоты и, тем самым, возбуждения резонансного или околорезонансного колебания в плоскости х-y. В этом варианте воплощения взаимодействие создается между зондом 54 кантилевера АСМ и поверхностью образца. Имеется два механизма детектирования зонда: механизм 56 детектирования взаимодействия и механизм 58 детектирования отклонения. Первый механизм 56 приспособлен для измерения одного параметра, характеризующего взаимодействие между зондом 20 и образцом 12, и, соответственно, он может быть тем же самым, что и механизм 24 детектирования зонда согласно Фиг.1 и 2, если этим параметром является электрическая емкость. Механизм 58 детектирования отклонения выполнен с возможностью измерения смещения головки зонда и, таким образом, изгиба кантилевера 54, который также характеризует интенсивность взаимодействия. Механизм 26 обратной связи выполнен с возможностью приведения в действие пьезоэлектрического преобразователя 16 в качестве отклика на сигнал, который получен от механизма 58 детектирования отклонения, и, за счет этого, с возможностью управления относительной высотой зонда 54 и образца 12. Данные, собранные механизмом 56 детектирования взаимодействия, анализируются и выводятся на дисплей 28.
При снятии изображений с использованием устройства 50 образец 12 сначала приводят в непосредственную близость с зондом 54 кантилевера с помощью средства 18 приблизительного привода. Точные корректировки высоты и исходного стартового положения производят с помощью пьезоэлектрического преобразователя 16 привода, в то время как механизм 58 детектирования отклонения измеряет изгиб кантилевера, возникающий в результате взаимодействия зонд 54-образец 12. Как только измеряемый изгиб достиг нужного уровня, поверхность образца сканируется под зондом 54. При сканировании образца 12 под зондом 54 эталонный генератор 52 стабильной частоты настраивают на вибрацию перпендикулярно в плоскость чертежа и из плоскости чертежа на этой Фигуре (по оси y). За счет этого колеблется платформа, на которой установлен образец. В то же время, пьезоэлектрический преобразователь 16 поступательно перемещает образец 12 в перпендикулярном направлении (по оси х). Колебание образца имеет относительно большую амплитуду, порядка нескольких микрон. В ходе сканирования непрерывно производятся считывания механизмом 56 детектирования взаимодействия и механизмом 58 детектирования отклонения.
Как и ранее, с использованием резонансного колебания - будь то образец 12, а не зонд 54 - для облегчения одной составляющей растрового сканирования, данные с «изображаемого» участка снимаются с гораздо большей скоростью, чем та скорость, которая может быть достигнута в известных из уровня техники сканирующих силовых микроскопах.
Механизм 26 обратной связи настроен на поддержание среднего изгиба кантилевера (усредненного по многим периодам колебания образца) приблизительно постоянным за счет подъема или опускания образца 12 согласно необходимости. Выходной сигнал от механизма 56 детектирования взаимодействия направляют непосредственно в процессор и на дисплей 28. Для обеспечения возможности обработки цифровых данных, снятая строка сканирования может быть искусственно разбита (дискретизирована) на отдельные элементы (пиксели) с помощью процессора.
Эталонный генератор 52 стабильной частоты может быть одним из широкого ряда выпускаемых промышленностью генераторов или генератором созданной на заказ конструкции для обеспечения желательной частоты колебания. Подходящим примером является генератор на кварцевом кристалле с резонансной частотой 32 кГц. Эталонный генератор стабильной частоты очень подходит для данного применения, поскольку он сконструирован с сильно анизотропными механическими свойствами. Поэтому его резонансы являются независимыми и могут быть возбуждены индивидуально и, таким образом, ограничены только тем (или теми), которые находятся в плоскости образца. Важно, что эталонный генератор 52 можно ввести в резонанс в одном направлении и сканировать в другом направлении, причем без связывания, возникающего между двумя режимами. За счет этого обеспечивается стабильное быстрое движение образца 12 по мере «опрашивания» (детального исследования) его зондом 54.
Для некоторых применений вариант воплощения настоящего изобретения, показанный на Фиг.3, может иметь несколько преимуществ по сравнению с тем, который показан на Фиг.1. Механизм 58 детектирования отклонения относится к тому типу, который является стандартным в области АСМ-микроскопии: изгиб кантилевера измеряется с использованием лазерного излучения, отражаемого от зонда. При резонировании образца, а не зонда, оптические средства, измеряющие это отклонение, не должны компенсировать сканирование зонда. Это упрощает извлечение данных об отклонении и позволяет заключать данный механизм внутри неподвижного корпуса.
В варианте воплощения, альтернативном показанному на Фиг.3 варианту, можно обойтись без отдельного механизма 56 детектирования взаимодействия и использовать выходной сигнал механизма 58 детектирования отклонения и для получения данных изображения, и для обратной связи. Этот механизм детектирования зонда является традиционным и используется в АСМ-микроскопах известного уровня техники.
В еще одном альтернативном варианте воплощения зонд 20, образец 12, пластина 14 и эталонный генератор 52 стабильной частоты погружены в жидкость. В идеальном случае зонд 20 кантилевера должен иметь низкую добротность (Q), однако большинство выпускаемых промышленностью кантилеверов для АСМ (например, монокристалл Si) имеют высокую добротность Q. Если кантилевер имеет высокую Q, то реагирование на изменения занимает много времени, и он будет совершать затухающие колебания («звонить») на своей резонансной частоте, если ему будет дан стимул. Созданные на заказ конструкции кантилевера могут иметь низкую Q, но альтернативный путь заключается в том, чтобы просто задемпфировать (погасить) добротность путем погружения в жидкость.
Также существуют несколько потенциально возможных режимов работы АСМ, любой из которых может быть приспособлен для реализации настоящего изобретения. В контактном режиме зонд постоянно удерживают в контакте с образцом. Изгиб кантилевера может быть измерен, а обратная связь - основана на его среднем значении. В обрабатывающем режиме исполнительный механизм привода приводит кантилевер в «обрабатывающее» движение на его резонансной частоте. Поэтому кантилевер контактирует с поверхностью только в течение очень небольшой доли своего периода колебания (обработки). Это сильно сокращенное время контакта означает, что действующие на образец боковые силы намного снижены, и зонд поэтому оказывает на образец меньшее разрушающее действие при выполнении сканирования. Поэтому это решение широко применяется для получения изображений чувствительных биологических образцов. В режиме прерывистого контакта кантилевер совершает колебание вертикально вне резонанса. Тогда могут быть измерены амплитуда этого колебания или изгиб кантилевера, либо они оба, что обеспечивает создание изображения и обратной связи на основе любой комбинации этих двух параметров. Этот прерывистый контакт уменьшает боковые силы, но устраняет излишнюю длительность времени отклика, связанную с работой на резонансе в том случае, если добротность кантилевера является высокой.
При сканировании образца зонд АСМ контактирует с поверхностью образца. Хотя это представляет собой недостаток в том случае, если образец является «нежным» (чувствительным), однако взаимодействие с поверхностью делает возможным воздействие на свойства поверхности и, таким образом, намеренную «запись» информации в/на образец. Эта технология известна под названием нанолитографии. Например, за счет приложения напряжения к проводящему кантилеверу может быть окислена некоторая область металлического слоя образца в виде пластины (полупроводниковой пластины). Еще один пример, использующий двухфотонное поглощение и полимеризацию фоторезиста, описывается в работе Хайобо Инь (Xiaobo Yin) с соавторами «Двухфотонная нанолитография ближнего поля с использованием оптического зонда без отверстия» ("Near-field two-photon nanolithography using an apertureless optical probe"), опубликованной в Appl. Phys. Lett., 81(19), 3663 (2002). В обоих примерах очень малый размер зонда позволяет записать информацию с очень большой плотностью.
АСМ согласно настоящему изобретению также может быть приспособлен для использования в нанолитографии. При этом не только обеспечивается потенциальная возможность более быстрых времен записи по сравнению с достигаемой ранее скоростью записи при использовании стабильного резонансного колебания зонда, но также и обеспечивается потенциальная возможность повышенного разрешения изображения, т.е. плотности записи. Разрешение изображения в АСМ-варианте воплощения настоящего изобретения ограничивается не стабильностью микроскопа, т.е. способностью обращаться к прилегающим точкам с высокой степенью точности, а скорее длиной взаимодействия. Это означает, что, в качестве инструмента литографии, он обладает потенциальной возможностью достичь гораздо большего разрешения при записи, чем 50-100 нм, достигаемые в литографических системах известного уровня техники.
Специалистам в области сканирующей зондовой микроскопии будет очевидно, что в соответствии с настоящим изобретением может быть реализовано множество изменений параметра взаимодействия, параметра обратной связи, сканирующего движения и конструкции зонда. Например, используемый в устройстве согласно Фиг.1 локальный зонд 20 может быть заменен на кантилеверный зонд и механизм 24 детектирования, адаптированный для использования с АСМ. В этом варианте реализации изобретения применяют два резонансных режима. При использовании в режиме обработки обработку проводят около резонансной частоты кантилевера или на этой резонансной частоте. С другой стороны, сканирующие колебания, в соответствии с данным изобретением, приводят в действие либо на резонансной частоте узла кантилевер/исполнительный механизм привода, если колебание совершает зонд, либо на резонансной частоте образца. В любом случае упомянутый узел или образец является более массивным, и это будет гарантировать частоту колебания более низкую, чем частота обработки. Таким образом, в пределах каждой строки сканирования неизбежно «отбирается» некоторое число контактных точек. Отклонение зонда можно постоянно контролировать с помощью пьезоэлектрического покрытия на зонде.
В еще одном альтернативном варианте механизм 24 детектирования зонда может быть выполнен с возможностью постоянного контролирования и измерения амплитуды резонансного колебания, согласно вышеизложенному в отношении варианта воплощения СЕМ. Вместо извлечения данных измерений электрической емкости в качестве характеристики взаимодействий зонд-образец для формирования изображения анализируют и восстанавливают (реконструируют) негармонические составляющие затухающего колебания. Этот вариант реализации обеспечивает троякое использование резонансного (или околорезонансного) колебания зонда или образца: во-первых - для обеспечения более быстрого сканирования по сравнению с известными из уровня техники системами; во-вторых - для обеспечения основы для измерения взаимодействий зонд-образец; и, в-третьих, - для поддержания высоты.
Еще один альтернативный вариант опять заключается в регулировании амплитуды резонансного колебания через обратную связь, но в этом варианте воплощения зонд наклонен таким образом, что он не является нормальным к поверхности. Наклоненный зонд (или плоский образец) совершает колебания в резонансе для снятия каждой строки сканирования, а вторая система детектирования настроена на детектирование движения зонда, перпендикулярного к углу наклона. Таким образом, изображение формируется из небольших отклонений в движении зонда, перпендикулярного наклону, измеряемых второй системой детектирования в пределах каждого цикла колебаний, в то время как высота регулируется по основному колебанию.
Еще один альтернативный вариант заключается в выполнении как зонда 20, 54, так и механизмов 24, 56, 58 детектирования с возможностью детектирования (обнаружения) изменений во взаимодействии зонда с магнитным полем образца. В случае этого назначения зонд может быть выполнен в виде проводящего контура, а механизм детектирования приспособлен для измерения наводимых в нем токов по мере резонансного сканирования зонда или образца. Альтернативно, механизм детектирования может измерять изменения сопротивления проводящего контура. Этот последний альтернативный вариант использует гигантское магнитосопротивление, аналогичное тому, которое имеет место в головке жесткого диска на резонансно колеблющемся зонде. Третья возможность заключается в использовании металлического зонда, и тогда вихревые токи будут обеспечивать противодействующее силе гармоническое колебание зонда, и получаемые при этом негармонические составляющие опять же могут быть использованы для формирования изображения.
Специалистам в данной области техники будет ясно, что для извлечения информации о взаимодействии зонд-образец имеется множество методов, и их можно комбинировать с выполнением быстрого резонансного растрового сканирования поверхности образца в соответствии с настоящим изобретением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2011 |
|
RU2461839C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ПОЛУКОНТАКТНОГО РЕЖИМА С ФИКСИРОВАННЫМ ПИКОМ СИЛЫ ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ СВОЙСТВ ОБРАЗЦА | 2011 |
|
RU2571446C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОМПАКТНЫМ СКАНЕРОМ | 2012 |
|
RU2571449C2 |
| Способ визуализации вируса гриппа | 2017 |
|
RU2649763C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ЗОНДА | 2009 |
|
RU2512674C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДЛЯ ДИНАМИЧЕСКОГО ЗОНДА | 2009 |
|
RU2518859C2 |
| ЗОНД ДЛЯ АТОМНОГО СИЛОВОГО МИКРОСКОПА | 2004 |
|
RU2356110C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2010 |
|
RU2442131C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ ИЗМЕРЕНИЯ МАССЫ И ДИССИПАТИВНЫХ СВОЙСТВ | 2008 |
|
RU2407021C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ И ИССЛЕДОВАНИЯ ПОВЕРХНОСТИ ВНУТРИ ЯДЕРНЫХ И ТЕРМОЯДЕРНЫХ УСТАНОВОК | 2000 |
|
RU2169954C1 |

Сканирующий зондовый микроскоп содержит средство привода, обеспечивающее детектируемое взаимодействие между зондом и образцом, средство придания колебаний либо зонду, либо образцу, механизм детектирования зонда и механизм обратной связи, обеспечивающий регулирование расстояния, отделяющего зонд и образец. Средство придания колебаний обеспечивает относительное колебательное движение зонда по занятой образцом поверхности так, что зонд выполняет по существу линейную развертку поверхности образца. Во время сканирования поверхности образца участок сканирования охватывается за счет упорядоченного расположения строк сканирования, каждая из которых снимается при колебании либо зонда, либо образца на его резонансной частоте или около его резонансной частоты, так что двойная амплитуда колебания равна максимальной длине строки сканирования, а их упорядоченное расположение обеспечивается действием средства привода. Обеспечивается более быстрое получение данных о взаимодействии образец-зонд и за счет этого повышение скорости считывания или записи информации. 3 н. и 20 з.п. ф-лы, 3 ил.
средство (16, 18, 22) привода, выполненное с возможностью обеспечения относительного движения между зондом (20, 54) и поверхностью образца и способное приводить образец (12) и зонд (20, 54) в непосредственную близость друг с другом, достаточную для установления между ними детектируемого взаимодействия,
средство (22, 52) придания колебаний либо зонду (20, 54), либо образцу (12),
механизм (24, 56, 58) детектирования зонда, выполненный с возможностью измерения по меньшей мере одного параметра, характеризующего интенсивность взаимодействия между зондом (20, 54) и образцом (12), и
механизм (26) обратной связи, выполненный с возможностью обеспечения регулирования отделяющего зонд и образец расстояния за счет приведения в действие средства (16, 22) привода в качестве отклика на изменение среднего значения одного из упомянутых параметров относительно предварительно заданного значения,
отличающийся тем, что средство (22, 52) придания колебаний обеспечивает относительное колебательное движение зонда (20, 54) по занятой образцом поверхности так, что зонд выполняет, по существу, линейную развертку поверхности образца, причем во время сканирования поверхности образца участок сканирования охватывается за счет упорядоченного расположения строк сканирования, каждая из которых снимается при колебании либо зонда (20, 54), либо образца (12) на его резонансной частоте или около его резонансной частоты, так что двойная амплитуда колебания равна максимальной длине строки сканирования, а их упорядоченное расположение обеспечивается действием средства (16, 22) привода.
а) перемещают зонд (20, 54) с кончиком субнанометровых размеров в непосредственную близость с образцом (12) для того, чтобы обеспечить возможность установления взаимодействия между зондом (20, 54) и образцом (12),
б) осуществляют колебание либо зонда (20, 54) по поверхности образца (12) на его резонансной частоте или около его резонансной частоты, либо образца (12) под зондом (20, 54) на его резонансной частоте или около его резонансной частоты, причем колебание является таким, что зонд выполняет, по существу, линейную развертку поверхности образца, одновременно обеспечивая относительное движение между зондом (20, 54) и поверхностью, так что упорядоченное расположение строк сканирования, максимальная длина которых равна двойной амплитуде колебания, охватывает участок сканирования,
в) измеряют параметр, характеризующий интенсивность взаимодействия,
г) контролируют параметр, измеряемый на этапе (в), или второй параметр, который также характеризует взаимодействие между зондом (20, 54) и образцом (12), и, если значение контролируемого параметра падает ниже или поднимается выше заданного значения, регулируют отделяющее зонд (20, 54) и образец (12) расстояние с тем, чтобы привести значение контролируемого параметра обратно к заданному значению, и
д) обрабатывают измерения, снятые на этапе (в), для извлечения информации, относящейся к нанометровой структуре образца.
средство привода, выполненное с возможностью обеспечения относительного движения между зондом и поверхностью образца и способное приводить образец и зонд в непосредственную близость друг с другом,
средство придания колебаний либо зонду, либо образцу,
механизм записи зондом, выполненный с возможностью прерывистого изменения, в более коротком масштабе времени, чем один период колебания зонда или образца, интенсивности взаимодействия между зондом и образцом и, тем самым, прерывистого изменения свойства поверхности образца в месте расположения зонда, отличающийся тем, что
средство (22, 52) придания колебаний обеспечивает относительное колебательное движение зонда (20, 54) по занятой образцом поверхности так, что зонд выполняет, по существу, линейную развертку поверхности образца,
при этом микроскоп выполнен с возможностью осуществления в ходе работы записывающего сканирования поверхности образца, причем участок сканирования охватывается за счет упорядоченного расположения строк сканирования, каждая из которых снимается при колебании либо зонда (20, 54), либо образца (12) на его резонансной частоте или около его резонансной частоты, так что двойная амплитуда колебания равна максимальной длине строки сканирования, а их упорядоченное расположение обеспечивается действием средства привода.
| US 6220084 A, 24.04.2001 | |||
| US 6404207 A, 11.06.2002 | |||
| Сканирующий туннельный микроскоп | 1988 |
|
SU1531181A1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП И СПОСОБ ИЗМЕРЕНИЯ СВОЙСТВ ПОВЕРХНОСТЕЙ ЭТИМ МИКРОСКОПОМ | 1996 |
|
RU2109369C1 |
| KR 20010068003, 13.07.2001. | |||

