Настоящее изобретение относится к области атомных силовых микроскопов, к зондам, применяемым в указанных микроскопах, и способу управления указанными микроскопами. В частности, настоящее изобретение относится к атомному силовому микроскопу, в котором не применяется традиционное управление с обратной связью высотой зонда.
Атомный силовой микроскоп (AFM) или сканирующий силовой микроскоп (SFM) был изобретен в 1986 г. Биннингом, Квейтом и Гербером. Аналогично всем остальным сканирующим зондовым микроскопам AFM основан на принципе механического сканирования нанометрическим зондом по поверхности образца для получения «карты взаимодействия» образца. Сила взаимодействия в данном случае представляет собой просто молекулярное взаимодействие между образцом и наконечником остроконечного зонда, закрепленным на кантилеверной пружине. Когда наконечник зонда приводят в непосредственную близость с образцом, кантилевер изгибается в ответ на силу взаимодействия. Изображения получают сканированием образца относительно зонда и измерением отклонения кантилевера в зависимости от положения по горизонтали. Для измерения упомянутого изгиба обычно применяют технологию оптического плеча. Поскольку кантилевер подчиняется закону Гука для небольших перемещений, можно логически вывести силу взаимодействия между наконечником и образцом.
AFM обычно применяют в одном из двух режимов. В режиме постоянной силы обратная связь обеспечивает позиционирование пьезоэлектрического привода для перемещения образца (или зонда) вверх или вниз в ответ на любое изменение силы взаимодействия, которую регистрируют. Таким образом можно поддерживать относительно постоянную силу взаимодействия и получают довольно точное топографическое изображение образца. В качестве альтернативы, AFM можно применять в режиме постоянной высоты. Высоту по вертикали образца или зонда во время сканирования не регулируют совсем или регулируют очень несущественно. В данном контексте регулировка высоты по вертикали означает, что перемещение сообщается либо исполнительному механизму, соединенному с кантилеверным зондом, либо самому образцу. Следовательно, у наконечника зонда сохраняется степень свободы для движения вверх и вниз в то время, как изменяется величина изгиба кантилевера. В режиме с постоянной высотой топографические изменения образца невозможно отличить от изменений силы взаимодействия в том смысле, что какое-то одно из двух или оба данные изменения вызывают изгиб кантилеверной пружины.
В дополнение к двум упомянутым разным режимам обратной связи контрастность изображения обычно получают одним из трех разных способов. В контактном режиме наконечник и образец находятся в состоянии тесного контактирования, т.е. в режиме взаимного отталкивания молекул в то время, как происходит сканирование. В режиме постукивания исполнительный механизм приводит кантилевер в движение «постукивания» с резонансной частотой данного кантилевера. Поэтому наконечник зонда контактирует с поверхностью только в течение очень малой доли периода колебаний (постукивания) данного наконечника. Столь значительное сокращение времени контакта подразумевает, что поперечные силы воздействия на образец намного ослабляются, и поэтому зонд менее разрушителен для образца при выполнении сканирования. Поэтому же данный режим чаще применяют для визуализации чувствительных биологических образцов. Амплитуду колебаний обычно поддерживают постоянной с использованием механизма обратной связи. При неконтактной работе кантилевер вынуждают колебаться над образцом на таком расстоянии, что сила межмолекулярного взаимодействия больше не является отталкивающей. Однако данный режим работы очень сложно реализовать на практике.
Недавние достижения в зондовой микроскопии привели к значительному сокращению времени сбора данных. При использовании технологий ускоренного сканирования типа технологии, описанной в Международной публикации № WO 02/063368 заявки на патент согласно PCT, ограниченная чувствительность зонда все в большей степени становится фактором ограничения времени съема изображения. Зонд не будет мгновенно реагировать на изменение характеристик образца, и поэтому существует неустранимая временная задержка между, например, наталкиванием зонда на участок поверхности образца с увеличенной высотой и реакцией на это системы. Упомянутый недостаток относится к режимам как постоянной силы, так и постоянной высоты работы AFM. Такой недостаток менее выражен в режиме постоянной высоты, который, по данной причине, является предпочтительным режимом работы для технологий быстрого сканирования, но все же достаточно выражен, чтобы чрезмерно ограничить скорость сканирования в быстродействующих сканирующих зондовых микроскопах нынешнего поколения.
В режиме работы AFM с постоянной силой обычно используют механизм с электронной обратной связью для поддержания постоянной средней силы взаимодействия. Если в процессе осуществления сканирования происходит изменение силы взаимодействия (обусловленное, например, изменением высоты образца), то сначала это наблюдается по изменению отклика зонда, который регистрируется чувствительной электронной системой, вырабатывается ошибка (например, уставка минус отклонение), и используется контур обратной связи для минимизации сигнала ошибки регулированием положения зонда или образца. Контур обратной связи обладает постоянной времени, связанной с ним, которая налагает ограничение на конечную скорость, с которой можно снять полное отсканированное изображение.
Проблема не столь сильно ограничивает при работе в режиме постоянной высоты, в котором электронную обратную связь обычно не применяют в такой степени, как в AFM с постоянной силой. Однако для более точного измерения силы взаимодействия наконечник зонда должен следовать насколько возможно профилю поверхности образца. Это обеспечивается благодаря использованию противодействующей силы, возникающей при изгибе кантилевера поверхностью образца. А именно, когда сканируется высокий участок поверхности образца, кантилевер все больше изгибается вверх и энергия, накапливаемая пружиной, возрастает. Когда высота уменьшается, возвращающая сила толкает кантилевер обратно к его (прямолинейному) положению равновесия и таким образом поддерживается контакт с поверхностью. Однако если скорость сканирования слишком высока, то зонд не будет следовать по поверхности, а будет фактически подбрасываться при переходе любого выступа на поверхности и может начать резонировать или «вибрировать». Это, в свою очередь, возбуждает колебания отображаемой силы взаимодействия. Аналогично, когда высота уменьшается, восстанавливающая сила, возможно, будет недостаточно большой для обеспечения контактирования наконечника зонда с поверхностью и информация о поверхности на данном участке изображения будет утеряна.
Упомянутый выше документ WO 02/063368 раскрывает сканирующий зондовый микроскоп, в котором либо образец, либо зонд установлены на резонаторе, и посредством возбуждения резонатора на его резонансной частоте или близкой к ней частоте образец можно приводить в сканирующее движение относительно зонда. Обычно, резонатор будет иметь резонансную частоту порядка нескольких десятков кГц, которая аналогична резонансной частоте зонда. Поэтому характерный временной интервал между пикселями короче, чем 1/fr, где fr означает резонансную частоту зонда. С другой стороны, время (τres), затрачиваемое на реакцию на изменение топографии поверхности образца, зависит от эффективной массы зонда и жесткости пружины кантилевера. Если τres>1/fr, то, очевидно, что сила взаимодействия не будет точно измерена от пикселя к пикселю.
Очевидна потребность в обеспечении повышенной чувствительности зонда на флуктуации рельефа образца или изменения силы взаимодействия и, следовательно, в обеспечении возможности проведения атомно-силовой (AFM) микроскопии с более высокими скоростями сканирования до того, как артефакты в изображении, например артефакты, вызванные вибрацией зонда или неточным прослеживанием поверхности, начинают ухудшать качество изображения.
В соответствии с настоящим изобретением обеспечивается зонд для использования в атомном силовом микроскопе или для нанолитографии, при этом зонд содержит силоизмерительный элемент, соединенный с наконечником зонда с радиусом наконечника 100 нм или менее, и отличается тем, что зонд выполнен таким образом, что, когда данный зонд испытывает воздействие приложенной внешней силы, сила смещения поджимает наконечник зонда или образец, или оба друг к другу с величиной, превосходящей восстанавливающую силу, возникающую вследствие смещения наконечника зонда при зондировании им образца.
При изучении настоящего изобретения полезно рассмотреть силы, действующие, когда типичный кантилеверный зонд контактирует с поверхностью образца в известном атомном силовом микроскопе. Поэтому ниже приведено соответствующее пояснение со ссылкой на фиг.1.
На фиг.1 показан образец 1, который сканируют зондом атомного силового микроскопа (AFM). Зонд содержит подложку 2, от которой продолжается кантилевер 3, при этом кантилевер 3 содержит остроконечный зондирующий нанометрический наконечник 4 с радиусом наконечника 100 нм или менее, установленный на конце, удаленном от подложки 2. При подготовке сканирования к зонду со стороны его подложки 2 прилагается направленная вниз сила (Fexternal) посредством установки зонда на AFM и приведения наконечника 4 зонда в контакт с образцом 1. Для сохранения контакта во время сканирования сила Fexternal больше силы, которая необходима просто для приведения наконечника 4 в контакт с образцом 1. В результате кантилевер 3 изгибается вверх из его исходного положения 5 во время сканирования образца.
В упрощенной модели можно принять, что кантелевер 3 подчиняется закону Гука для малых перемещений. Соответственно, если при нажиме на образец степень изгиба такова, чтобы переместить наконечник 4 перпендикулярно на расстояние x от его исходного положения, и жесткость кантилеверной пружины равна k, то восстанавливающая сила, развиваемая кантилевером, равна kx. Следовательно, направленная вниз сила, прилагаемая наконечником 4 и удерживающая его в положении отслеживания поверхности, пропорциональна kx.
Очевидно, что чувствительность наконечника 4 зонда и, следовательно, разрешающая способность средства AFM зависят от величины силы kx, прилагаемой кантилевером 3 к образцу 1. Чем больше сила взаимодействия зонда с поверхностью, тем выше чувствительность к колебаниям поверхности. Это означает, что требуется высокая жесткость k пружины, особенно, если необходимо быстрое сканирование. С другой стороны, чем больше сила, тем выше вероятность, что зонд повредит образец. Следовательно, известный из уровня техники кантилеверный зонд AFM должен обеспечивать принципиальный компромисс между чувствительностью зонда и вероятностью повреждения образца.
Однако зонд в соответствии с настоящим изобретением выполнен так, чтобы при сканировании образца данный зонд испытывал силу смещения, которая значительно больше восстанавливающей силы kx, прилагаемой зондом к образцу. Это дает зонду возможность лучше отслеживать поверхность образца, поэтому возможно ускорение сканирования. Как будет видно из следующего ниже подробного описания, превышение восстанавливающей силы силой смещения, что требуется в соответствии с настоящим изобретением, обеспечивают установкой элемента смещения, который чувствителен к приложенной извне силе, на зонд и/или уменьшением пружинной жесткости кантилеверной пластины.
В соответствии с настоящим изобретением и в отличие от традиционного AFM, в котором получение изображения может занимать свыше 30 секунд, образцы можно визуализировать за миллисекунды. Например, скорость 22,4 см·с-1 позволяет визуализировать площадь 4,4×4,4 микрометров за 14,3 мс и площадь 1,5×1,5 микрометров за 8,3 мс с разрешением 128 на 128 пикселей. Кроме того, даже при данной скорости можно обеспечить изображения с разрешением выше 10 нм по горизонтали и 1 нм по вертикали для мягкой полимерной поверхности.
В соответствии с одним вариантом осуществления настоящего изобретения элемент смещения может представлять собой, например, магнитный элемент, который чувствителен к приложенной извне магнитной силе, или электропроводный элемент, который должен быть подключен к одному выводу источника питания и потому обеспечивать возможность формирования напряжения между зондом и образцом. В обоих случаях имеет место такая полярность силы смещения (магнитного или электростатического), что данная сила поджимает зонд и образец друг к другу. Кроме того, величина силы смещения, которая прикладывается к зонду, не зависит от величины его отклонения. Таким образом, поскольку пластина зонда обладает очень малой пружинной жесткостью, восстанавливающая сила при изгибе/отклонении очень мала по сравнению с силой смещения и, следовательно, сила действия наконечника на поверхность фактически не зависит от отклонения.
Известные из уровня техники зонды AFM специально выполняли так, чтобы реагировать на внешнюю силу смещения. EP 872707, например, содержит описание кантилеверного зонда, который содержит пьезоэлектрический элемент. Управляющий сигнал подается в пьезоэлектрический элемент для поджима зонда вверх от образца для преодоления сил притяжения. Аналогично, патент США № 5515719 раскрывает зонд, который содержит магнитную частицу, которая в ответ на магнитное поле, управляемое соленоидом, вызывает оттягивание зонда от поверхности образца. Основная задача данного патента по-прежнему состоит в предотвращении притяжения зонда к поверхности образца и в предотвращении повреждений.
Кантилеверный зонд, описанный в Международной публикации WO 99/06793, также содержит магнитный элемент. Однако в данной системе магнитное поле используется для регулирования расстояния между зондом и образцом и изменяется в соответствии с требуемым разделительным расстоянием. Упомянутая система отличается от системы с магнитным полем, использованной в настоящем изобретении. В процессе сканирования сила, прикладываемая к наконечнику в данном примере, является постоянной и предназначена исключительно для ускорения возвращения наконечника к поверхности образца, если теряется контакт. Другая система, которая содержит зонд, который чувствителен к управляемому магнитному полю, описана в патенте США № 5670712. Величиной магнитного поля управляют посредством контура обратной связи, настроенного на поддержку отклонения кантилевера на постоянном уровне. Данное решение также отличается от зонда AFM в соответствии с настоящим изобретением, отличительной чертой которого является возможность изменения величины отклонения. Без данной степени подвижности невозможно отслеживать профиль поверхности образца и измерять силу взаимодействия, что противоречит общей цели настоящего изобретения.
В альтернативном варианте решения кантилеверная пластина выполнена с низким коэффициентом добротности (или Q-коэффициента). Данное решение по сравнению с пластинами с высоким Q-коэффициентом увеличивает скорость рассеяния механической энергии. Если зонд, расположенный на такой пластине, отталкивается от поверхности во время процесса сканирования, то любые последующие механические колебания ослабляются и зонд быстро вернется к траектории отслеживания изобретения поверхности образца. В соответствии с одним вариантом осуществления Q-коэффициент кантилеверной пластины снижают нанесением покрытия на пластину, при этом покрытие выполнено с возможностью рассеяния энергии, которая, в ином случае, накапливалась бы в механической форме в пластине посредством возбуждения колебаний, по меньшей мере, одной моды. Поэтому Q-коэффициент опорной пластины снижают для, по меньшей мере, одной моды колебаний данной пластины по сравнению с Q-коэффициентом соответствующей пластины без покрытия. Покрытие выполнено предпочтительно из энергопоглощающего материала, например полимерной пленки, нанесенной на, по меньшей мере, одну сторону зонда.
Очевидно, что отслеживание образца зондом в соответствии с настоящим изобретением оптимально достигается, если данный зонд выполнен с возможностью как подвергаться действию внешней продольной силы, так и наличия низкого Q-коэффициента. Однако в некоторых обстоятельствах требуется только одно из упомянутых свойств. Когда зонд подводят в окрестность образца, то предполагают, что образуется капиллярная перетяжка, которая соединяет один с другим. В частности, если Q-коэффициент зонда достаточно мал, то, как выяснилось, усилие смещения, которое возникает за счет капиллярной перетяжки, формирует доминирующую восстанавливающую силу. Аналогично, если прилагается большая сила смещения, то Q-коэффициент пластины не должен быть таким низким. Считается, что, в данном примере, рассеяние механической энергии может также происходить через взаимодействие зонда с поверхностью образца.
Кантилеверы AFM с покрытиями известны из уровня техники, хотя ни один не несет покрытия из материала, который пригоден для ослабления механических колебаний. Вышеупомянутый патент США № 5515719 раскрывает магнитное покрытие, посредством которого можно прилагать усилие к кантилеверу. Патенты США №№ 6118124 и 6330824 содержат описания кантилеверов с покрытием для обнаружения излучения. Следовательно, покрытие подвергается воздействию излучения, при этом интенсивность излучения измеряют по количественному изменению свойств кантилевера. Данное решение отличается от материала покрытия в соответствии с настоящим изобретением, которое не реагирует на падающее излучение, но поглощает механическую энергию.
В соответствии с альтернативным аспектом настоящего изобретения предлагается атомный силовой микроскоп для визуализации образца в соответствии с силой взаимодействия между образцом и зондом, при этом микроскоп содержит средство привода, выполненное с возможностью обеспечения сканирующего движения зонда и поверхности образца относительно друг друга и способное привести образец и зонд в непосредственную близость, достаточную для создания различимого взаимодействия между ними;
чувствительный механизм зонда, выполненный с возможностью измерения отклонения и/или смещения зонда;
отличающийся тем, что микроскоп содержит вышеописанный зонд.
В качестве альтернативы микроскоп отличается тем, что он содержит средство формирования силы (Fdirect), выполненное так, что в процессе работы сила (Fdirect) прикладывается к образцу или зонду, или к обоим, или между образцом и зондом, при этом сила (Fdirect) направлена таким образом, чтобы поджимать зонд к образцу или наоборот.
В соответствии с дополнительным аспектом настоящего изобретения предлагается способ сбора данных изображения с зоны сканирования образца с нанометрическими признаками, при этом данный способ содержит следующие этапы:
(a) перемещают зонд, содержащий опорную пластину с наконечником с радиусом наконечника 100 нм или менее, в непосредственной близости от образца для создания силы взаимодействия между зондом и образцом;
(b) вызывают создание силы (Fdirect) между образцом и зондом таким образом, чтобы побуждать зонд для перемещения к образцу или наоборот;
(c) сканируют зондом по поверхности образца или образцом под зондом и при этом обеспечивают перемещение зонда и поверхности относительно друг друга так, чтобы расположение линий сканирования обеспечивало охват площади сканирования;
(d) измеряют отклонение и/или смещение зонда и
(e) обрабатывают данные измерений, снятые на этапе (d) для извлечения информации, относящейся к нанометрической структуре образца.
Ниже приведены описания вариантов осуществления настоящего изобретения только для примера и со ссылками на прилагаемые чертежи.
Фиг.1 - схематичная иллюстрация сил, действующих при контактировании кантилеверного зонда с поверхностью образца в известном из уровня техники атомном силовом микроскопе.
Фиг.2 - схема реализации атомного силового микроскопа, который содержит зонд согласно первому варианту осуществления настоящего изобретения.
Фиг.3 - схема реализации атомного силового микроскопа, который содержит зонд согласно второму варианту осуществления настоящего изобретения.
Фиг.4 - схема реализации атомного силового микроскопа, который содержит зонд, согласно третьему варианту осуществления настоящего изобретения.
Фиг.5 - схема реализации атомного силового микроскопа, который содержит зонд согласно четвертому варианту осуществления настоящего изобретения.
Фиг.6 - схема реализации атомного силового микроскопа, который содержит зонд согласно пятому варианту осуществления настоящего изобретения.
Фиг.7 - схема реализации атомного силового микроскопа, который содержит зонд согласно шестому варианту осуществления настоящего изобретения.
Фиг.8 - схематичная иллюстрация сил, действующих при контактировании зонда с поверхностью образца в AFM, представленном на фиг.2-7.
Фиг.9a и 9d - AFM-изображения двух отдельных участков поверхности кристаллического полиэтиленаоксида (PEO), полученные с использованием зонда в соответствии с настоящим изобретением.
Фиг.9b, 9c, 9e и 9f - традиционные AFM-изображения тех же самых участков поверхности, которые изображены на фиг.9a и 9d.
Фиг.10 - иллюстрации примеров специальной конструкции кантилевера для зонда в соответствии с настоящим изобретением.
Фиг.11 и 12 - иллюстрация формирования участков специального кантилевера с низкой и регулируемой пружинной жесткостью.
На фиг.2 представлена схема реализации AFM, обозначенного в общем позицией 10, в котором используется зонд согласно первому варианту осуществления изобретения, выполненный в соответствии с аспектом настоящего изобретения. Представленное устройство AFM 10 содержит пластину 12, которая выполнена с возможностью вмещения образца 14 и закреплена на одной ветви камертона 16. Камертон 16 подсоединен к пьезоэлектрическому преобразователю 18 и средству 20 грубой подачи. Пьезоэлектрический преобразователь 18 используют для подачи образца 14 (вместе с пластиной 12 и камертоном 16) в трех направлениях: направлениях x, y и z. Как традиционно установлено в этой области техники, ось z прямоугольной системы координат будет принята перпендикулярной плоскости, занимаемой образцом 14. А именно: сила взаимодействия зависит как от местоположения зонда 22 в координатах xy над образцом 14 (от пикселя, который зонд отображает), а также от высоты зонда над образцом. Система управления (не показана) камертоном выполнена с возможностью подвода синусоидального напряжения к камертону 16 и, следовательно, возбуждения резонансной или околорезонансной вибрации в плоскости xy. Опционально, пластина 12 и камертон 16 могут опираться на виброизолирующее основание 32 для изолирования вибрации камертона 16 от остальной части микроскопа. Однако на частотах съема изображения, наблюдаемого в микроскопе, использующем данный зонд, внешний шум является меньшей проблемой, чем для более низких частот съема изображения, и поэтому можно обойтись без виброизолирующего основания. Зонд 22 представляет собой малоинерционный зонд AFM, и во время сканирования сила взаимодействия создается между наконечником 22a зонда и поверхностью образца. Чувствительный механизм 28 зонда выполнен с возможностью измерения смещения наконечника 22a зонда или изгиба пластины 22b, несущей наконечник, которые характеризуют величину силы взаимодействия. Данные, собранные чувствительным механизмом 28 зонда, анализируются и выдаются на дисплей 30.
Известные из уровня техники кантилеверные зонды обычно выполняют из силикона или нитрида силикона, что позволяет несложно изготавливать их с использованием отработанной микротехнологии силикона. Однако в отличие от известных из уровня техники катилеверных зондов зонд 22 в соответствии с настоящим изобретением содержит полимерное покрытие 22c, нанесенное на опорную пластину 22b зонда. Данное покрытие 22c, как изложено ниже в подробном описании, служит для рассеяния энергии, которая, в ином случае, накапливалась бы в механической форме в зонде посредством возбуждения колебаний ряда мод, и таким образом снижает Q-коэффициент опорной пластины для, по меньше мере, одной моды ее колебаний по сравнению с такой же пластиной без покрытия 22c.
При съеме изображений с использованием микроскопа 10 образец 14 сначала приводят в контакт с зондом 22 с использованием средства 20 грубой подачи. Точные настройки высоты и исходного положения выполняют пьезоэлектрическим приводом 18, тогда как чувствительный механизм 28 зонда измеряет изгиб зонда, обусловленный силой взаимодействия между зондом 22 и образцом 14. Как только измеренный изгиб достигает заданной величины, поверхность образца приводят в сканирующее движение под зондом 22. При сканировании образца 14 под зондом 22 запускают вибрацию камертона 16 в направлении и из плоскости фигуры (по оси y). Данная вибрация создает колебания столика, на котором закреплен образец. При этом пьезоэлектрический привод 18 поступательно перемещает образец 14 в перпендикулярном (x) направлении. Колебание образца осуществляется со сравнительно большой амплитудой, порядка нескольких микрометров. Во время сканирования непрерывно снимаются отсчеты чувствительным механизмом 28 зонда, который, как общепринято в технике, может действовать по технологии оптического затвора: изгиб зонда измеряют с использованием лазерного света, отражаемого зондом. Выходной сигнал чувствительного механизма 28 зонда подается непосредственно в процессор и дисплей 30.
Как указано выше, зонд 22, показанный на фигуре, отличается от известных из уровня техники зондов тем, что предлагаемый зонд содержит покрытие из полимерного материала 22c. Покрытие 22c может быть на одной или обеих сторонах с условием, что сам по себе материал пригоден для рассеяния энергии, которая, в ином случае, накапливалась бы в зонде.
Q-коэффициент является безразмерной величиной, которую можно использовать для количественного определения рассеяния (или ослабления) для вибратора. Данный коэффициент характеризуется следующим образом:

Система с сильным затуханием, в которой накопленная энергия быстро рассеивается, характеризуется низким Q-коэффициентом, а система со слабым затуханием характеризуется высоким Q-коэффициентом. Вибраторы, выполненные из силиконовых (Si) и нитридных силиконовых (SiN) материалов, не имеют значительных внутренних потерь, и в результате большинство серийно выпускаемых кантилеверов AFM будет обладать высоким Q-коэффициентом, обычно порядка 5-500 в воздухе. Кроме того, если кантилевер предназначен для применения в режиме постукивания, то целесообразно, чтобы кантилевер имел высокий Q-коэффициент. В данном режиме возбуждается движение кантилевера в резонансе и сила взаимодействия измеряется в течение нескольких периодов колебаний. При минимизировании энергетических потерь в течение периодов колебаний высокий Q-коэффициент действует тем самым, как механический фильтр.
Механический вибратор имеет множество резонансных мод колебаний, и коэффициент добротности для каждой из данных мод может быть отличным в зависимости от частотно-зависимых характеристик материала и формы вибратора. При упоминании в настоящем описании Q-коэффициента авторы подразумевают Q-коэффициент зонда по отношению к любой из данных мод или Q-коэффициенты для набора мод.
Однако в случае настоящего изобретения целесообразно применить зонд с низким Q-коэффициентом для высокоскоростной атомно-силовой микроскопии. Если зонд имеет высокий Q-коэффициент, то данному зонду будет требоваться много времени для реагирования на изменения и он будет вибрировать на смешанных резонансных модах при получении толчка, который, например, возникает при сканировании высокого признака (элемента) на поверхности образца. Настоящий зонд сконструирован так, чтобы обладать низким Q-коэффициентом за счет покрытия 22c. Теоретически, Q-коэффициент является достаточно низким для обеспечения критического затухания любого вызванного колебания. Использование низкого коэффициента добротности означает, что в опорной пластине зонда может накапливаться немного энергии, и поэтому зонд не будет долго «вибрировать» при получении толчка, например, при сканировании высокого участка поверхности образца. Это создает возможность более быстрого возврата к поверхности образца и, следовательно, более точного ее отслеживания во время сканирования.
Покрытие на зонде обеспечивает рассеяние механической энергии, которая, в ином случае, накапливалась бы в зонде. Зонд с покрытием будет накапливать меньше механической энергии, чем зонд без покрытия, и движение зонда с покрытием в конкретный момент будет теснее связано с поверхностью под наконечником зонда в данный конкретный момент, чем это было бы в отсутствие покрытия.
В зависимости от отображаемого образца и выбранной скорости сканирования может быть так, что весьма вероятно возбуждение более высокой моды, чем первая или основная мода колебаний. В данном случае покрытие выбирают так, чтобы обеспечить существенное снижение Q-коэффициента для данной моды. Настройкой энергопоглощающих и рассеивающих характеристик покрытия можно ослабить или устранить колебания зонда, которые, по всей вероятности, должны наносить ущерб качеству изображения при минимизации изменения массы зонда.
Для обеспечения покрытия 22c можно использовать многие полимерные материалы, и возможности конкретного выбора очевидны для специалиста в данной области техники. Материал выбирают по его вязкоупругим свойствам: материал должен быть достаточно упругим для сохранения его формы, как пленки, покрывающей кантилевер, при выполнении задачи рассеяния механической энергии. Рассеяние механической энергии происходит главным образом благодаря механизмам вязкости, которые зависят на молекулярном уровне от коэффициента трения между полимерной цепью и его окружением. Идеальным покрытием является резина с низкой плотностью поперечных соединений, степень соединения которых как раз достаточна для сцепления покрытия. Поперечные связи могут быть либо химическими, как в обычной резине, либо физическими, как в термопластическом эластомере. Установлено, что блок-сополимерный материал, в котором основным компонентом является аморфная резина с температурой стеклования ниже комнатной температуры и неосновным компонентом является аморфный полимер с температурой стеклования выше комнатной температуры, нанесенный как покрытие на обе стороны опорной пластины AFM, заметно совершенствует следящие возможности данной пластины при комнатной температуре. Сополимер наносился отливкой из раствора. А именно: каплю раствора, содержащего полимер, помещают на опорную пластину при высокой температуре для удаления растворителя. Можно использовать также другие термопластические эластомеры. Установлено, что описанная система позволяет зонду отслеживать поверхность образца даже со скоростями резонансных колебаний так, как описано в Международной публикации WO 02/063368.
Выводы, касающиеся полимерного материала и принятого способа нанесения, до известной степени сужают доступный выбор. Основная идея состоит в том, чтобы нанести на опорную пластину покрытие из энергопоглощающего материала, который, теоретически, не повлияет чрезмерно на другие свойства зонда, такие как масса, заостренность наконечника и т.д. Установлено, что отливка из раствора вышеописанного полимера на опорную пластину усиливает рассеяние энергии при допустимом повышении массы. Однако можно применять другие способы для осуществления покрытия. К таким способам относятся: «перемещение» заряженного полимера на опорную пластину в электролитической ячейке; химическая маркировка полимера (например, тиоловыми группами) и использование его реакции с материалом опорной пластины или металлическое покрытие опорной пластины (например, золотом в случае с тиоловым химическим составом) для закрепления полимера на опорной пластине.
Как отмечено выше, полимерные покрытия на кантилеверах AFM известны. Однако упомянутые известные из уровня техники материалы покрытий выбирают по химическому составу для возможности обнаружения падающего излучения. А именно: материал должен содержать химические связи, которые поглощают энергию предпочтительно на конкретных частотах. Данные покрытия не пригодны для рассеяния механической энергии с эффективностью, подходящей для применения в высокоскоростной микроскопии.
Нанесение покрытия 22c на обе стороны опорной пластины, при малом размере последней, практически выполнить несколько проще, чем нанесение покрытия только на одну сторону. Однако опорную пластину целесообразно оставлять без покрытия со стороны, обращенной к образцу. Одностороннее покрытие в достаточной мере ослабляет накопление механической энергии в зонде, а также снижает вероятность какого-либо попадания материала покрытия на образец при его контакте с зондом.
Теоретически, полимерный материл, используемый для покрытия 22c, будет иметь пик в его спектре энергетических потерь при температуре предполагаемого применения зонда и в частотном интервале основных резонансных мод опорной пластины. Поэтому обычно таким материалом должен быть высокоэластичный полимер. В качестве альтернативы можно также использовать сополимер или другой композиционный материал с высоким содержанием высокоэластичного полимера.
Рассеяние энергии полимерным покрытием можно увеличить, если данное покрытие наносить с заполнением просветов в кантилевере. А именно: если тонкая полимерная пленка перекрывает отверстие в кантилевере, то пленка будет выполнять функции как внутреннего рассеяния энергии, так и увеличения площади взаимодействия с окружающей текучей средой, например воздухом. Вязкое рассеяние энергии поэтому усиливается на данном пути с одновременным снижением до минимума пружинной жесткости кантилевера.
На фиг.3 приведена схема реализации AFM, обозначенного в общем позицией 10, в котором применен зонд согласно второму варианту осуществления изобретения, выполненный в соответствии с настоящим изобретением. Устройство AFM 10 очень сходно с устройством, изображенным на фиг.2, и компоненты, общие для обеих систем, обозначены одинаковыми позициями. Как указывалось выше, пластина 12, вмещающая образец 14, закреплена на одной ветви камертона 16, который приводится в состояние резонансной или околорезонансной вибрации в плоскости xy. Образец 14 (совместно с пластиной 12 и камертоном 16) сканируют по трем координатам: x, y и z, при этом создаваемая сила взаимодействия зависит от координат xy зонда 22 над образцом 14 (от пикселя, который зонд отображает), а также от высоты зонда над образцом. Кантилеверная составная часть зонда 22 покрыта с обеих сторон полимерной пленкой и выполнена по форме так, чтобы обладать низкой пружинной жесткостью, меньше, чем 1 Н·м-1. Однако в отличие от кантилевера, изображенного на фиг.2, зонд 22 по данному варианту осуществления настоящего изобретения дополнительно содержит магнитный элемент 24 (шарик, изображенный на фиг.3), закрепленный над наконечником 22a. Кроме того, в составе AFM находится магнит 26, например, под пластиной 12 для обеспечения магнитного поля достаточной напряженности для приложения силы к магнитному шарику 24. Сила может создаваться через магнитный момент, прилагаемый к зонду, или посредством градиента магнитного поля. Чувствительный механизм 28 зонда выполнен с возможностью измерения изгиба зонда 22, как в микроскопе 10, показанном на фиг.2. Данные, собранные чувствительным механизмом 28 зонда, анализируются и выдаются на дисплей 30.
При съеме изображений с использованием микроскопа 10 контактный механизм создания силы взаимодействия и технология сканирования, по существу, аналогичны описанным для устройства 10 на фиг.2. Однако, как только сила взаимодействия и, следовательно, изгиб опорной пластины 22b зонда достигают заданной величины, тогда включается магнит 26, который отсутствует в устройстве 10 на фигуре, и создается магнитное поле B в окрестности наконечника 22a зонда. Магнитный шарик 24 взаимодействует с данным полем, которое направлено так, что результирующая магнитная сила притягивает магнитный шарик 24 вниз к образцу 14. Следовательно, наконечник 22a зонда удерживается в контакте с образцом 14 непосредственным воздействием данного магнитного поля. При включенном магнитном поле B поверхность образца приводится в колебательное движение (на резонансной частоте камертона - столика с образцом) и сканирующее движение под зондом 22 и выходной сигнал обрабатывается вышеописанным образом.
На фиг.4-7 представлены схемы реализации альтернативных вариантов AFM, обозначенных в общем позицией 10, в которых применены зонды по дополнительным вариантам осуществления, выполненные в соответствии с настоящим изобретением. В каждом случае устройство AFM 10 очень похоже на устройство, показанное на фиг.2 и 3, и компоненты, общие для всех устройств, обозначены одинаковыми позициями. Как и выше, образец 14 закреплен на пластине 12. В отличие от вариантов осуществления, изображенных на фиг.2 и 3, зонд 22, показанный на фиг.4, 5, 6 и 7, закреплен на одной ветви камертона 16, и управление подачей и как грубым, так и точным позиционированием зонда относительно образца осуществляется преобразователями 18, 20, например пьезоэлектрическими преобразователями, которые управляют перемещением зонда 22 и камертона 16, а не пластины 12. Данная система позволяет осуществлять сканирование зондом с использованием способа резонансного сканирования над образцом вместо сканирования образцом под неподвижным зондом. Как показано на фиг.4, резонатор 16 и зонд 22 приводят в сканирующее движение по оси x (x-y-z) пьезоэлектрическим преобразователем 18, тогда как в системах на фиг.5 и 6 управление перемещением зонда/образца относительно друг друга в направлении сканирования (направлении x) во время сканирования обеспечивается посредством преобразователя 70, соединенного с пластиной 12. Следовательно, можно осуществлять сканирование либо образцом по обеим осям при неподвижном зонде, либо зондом по обеим осям при неподвижном образце, либо чем-то одним, образцом или зондом, по одной оси, тогда как сканирование по другой оси обеспечивается движением другого из них. В случае на фиг.7 управление сканирующим перемещением зонда/образца относительно друга друг обеспечивается преобразователем 70, соединенным с резонатором 16 и зондом 22, а точное позиционное управление исключено, так как такая точность исходного положения сканирования не требуется во всех случаях. Это подчеркивает дополнительное преимущество очень высоких скоростей сканирования, которые обеспечиваются с помощью описанного изобретения в сочетании со способом резонансного сканирования. Частота съема изображения выше обычных частот механических шумов и выше частот нестабильностей движения, которые обычно свойственны способам позиционирования по траектории. Следовательно, можно обходиться без высокоточных преобразователей, которые обычно необходимы.
На фиг.4, 5 и 7 наконечник 22a зонда подвергается воздействию силы, перемещающей наконечник 22a к образцу 14. В примере на фиг.4 сила является притягивающей и создается напряжением смещения, приложенным между наконечником 22a зонда и пластиной 12. Следовательно, наконечник 22a зонда и пластина 12 подсоединены последовательно к выводам источника 60 питания. Для создания необходимой силы притяжения между наконечником 22a зонда и пластиной 12 зонд снабжен электропроводным покрытием 50 в дополнение к демпфирующему покрытию 22c для обеспечения наличия у зонда низкого Q-коэффициента. В случае на фиг.6, образец 14 и наконечник 22a зонда размещают в герметизированной вязкой окружающей среде 80, например в жидкой окружающей среде. В данном варианте осуществления изобретения источник 60 питания подключен к электропроводному покрытию 50 и второй пластине 90, расположенной под пластиной 12 с образцом, вне вязкой окружающей среды. При погружении зонда в жидкость (что может потребоваться в случае биологических образцов) можно отказаться от демпфирующего покрытия 22c на зонде, так как воздействие жидкой окружающей среды на зонд приводит к наличию у зонда низкого Q-коэффициента, приближающегося к 1.
Для понимания признаков, которые являются необходимыми для настоящего изобретения, полезно рассмотреть схематичное представление сил, действующих во время осуществления сканирования. Соответствующая схема приведена на фиг.8, на которой приведена такая же установка, как на фиг.1, поэтому аналогичные компоненты обозначены идентичными позициями. На фиг.8 показан образец 1, который сканируют зондом атомного силового микроскопа (AFM) в соответствии с настоящим изобретением. Зонд содержит подложку 2, от которой продолжается опорная пластина 3, при этом пластина 3 имеет остроконечный зондирующий наконечник 4, установленный на конце, удаленном от подложки 2. При подготовке сканирования к зонду на стороне его подложки 2 прилагается направленная вниз сила (Fexternal) посредством установки зонда на AFM и приведения наконечника 4 зонда в контакт с образцом 1. Для сохранения контакта во время сканирования сила
Fexternal должна быть больше силы, которая необходима просто для приведения наконечника 4 в контакт с образцом 1. В результате опорная пластина 3 изгибается вверх из его исходного положения 5 присутствующей силой Fdirect 5 во время сканирования образца. Как и прежде, формируется сила, пропорциональная kx, в результате изгиба опорной пластины и направляет наконечник 4 вниз к поверхности образца.
В случае, если зонд, конструктивно выполненный в соответствии с настоящим изобретением, отклоняется от поверхности образца, например, при столкновении с возвышенным участком, то два фактора способствуют возвращению данного зонда обратно к контакту с образцом. Это обеспечивает возможность более точного отслеживания поверхности, даже при высоких скоростях сканирования. Во-первых, как очевидно в вариантах осуществления, показанных на фиг.3-7, вторую силу
Fdirect, предназначенную для ускорения перемещения зонда к образцу, можно настроить так, чтобы минимизировать время, которое занимает приведение зонда обратно в контакт с поверхностью. Данная сила, которая в основном не зависит от рельефа, служит для ускорения быстродействия зонда. Во-вторых, на зонд нанесено покрытие из энергопоглощающего материала (или погружен в жидкость), который(ая) уменьшает энергию, накапливаемую в зонде, и потому ослабляет влияние, которое предыдущие толчки оказывают на движение зонда, и обеспечивает, чтобы зонд быстро приходил в стабильное состояние контакта с поверхностью.
Суммарная восстанавливающая сила, прижимающая зонд к поверхности, в данном случае зависит от
Fdirect+kx.
Теоретически, дополнительное усилие Fdirect выше, чем сила изгиба кантилевера kx. Кроме того, величина данной силы должна быть достаточно большой, чтобы приводить зонд в контакт с поверхностью, если потеря такого контакта случается, в пределах приблизительно одного пикселя.
В варианте осуществления изобретения, изображенном на фиг.3, дополнительная сила Fdirect является магнитной силой, создаваемой приложением магнитного поля к наконечнику зонда, который содержит магнитный элемент, например шарик или магнитное покрытие. Поэтому очевидно, что расположение магнита в AFM не особенно важно, просто упомянутый магнит следует располагать так, чтобы существовала направленная вниз составляющая силы, притягивающая наконечник 4 зонда к образцу 1. В последующих вариантах осуществления изобретения дополнительная сила Fdirect является электростатической силой.
В варианте осуществления изобретения, изображенном на фиг.2, дополнительная сила Fdirect по-прежнему влияет на следящую рабочую характеристику зонда, но источник данной характеристики является более сложным. Поскольку зонд и образец приводят в непосредственную близость друг к другу, то полагают, что обычно образуется капиллярная перетяжка, которая соединяет их. Полагают, что данная капиллярная перетяжка возникает из жидкости, которая неизбежно будет присутствовать в среде, окружающей образец, когда изображение образца получают в воздухе, и которая конденсируется около зоны контактирования между зондом и образцом. Установлено, что в нормальном режиме продольная сила Fdirect, порождаемая капиллярной перетяжкой, является достаточно большой, чтобы быстро формировать доминирующую восстанавливающую силу на зонд с низким Q-коэффициентом, т.е. Fdirect>kx. Это особенно справедливо для гидрофильных поверхностей. Выбором зонда, который обладает гидрофильной поверхностью, например из нитрида силикона, можно обеспечить создание капиллярной перетяжки между зондом и образцом.
Независимо от происхождения дополнительной продольной силы Fdirect низкий Q-коэффициент зонда делает возможным быстрое рассеяние накопленной энергии, так как опорная пластина выпрямляется, и контакт зонда с поверхностью образца восстанавливается под действием продольной силы Fdirect. Поэтому отслеживание поверхности образца зондом достигается некоторым подобием механического контура обратной связи, который действует быстрее, чем известные из уровня техники механизмы слежения с их зависимостью от силы kx изгиба кантилевера.
В микроскопе, предлагаемом настоящим изобретением, конец зонда реагирует на частоту, значительно более высокую, чем первая мода колебаний зонда. Следовательно, больше не существует простой связи между изгибом зонда и его вертикальным положением, так как величина изгиба теперь будет зависеть от того, сколько времени зонд находился в данном вертикальном положении. Поэтому изображения, полученные с использованием способа, основанного на отражении лазерного излучения от обратной стороны зонда на расщепленный фотодиод, будут соответствовать не рельефу поверхности, а скорее комбинации рельефа и градиента. Для получения изображений, которые точно соответствуют рельефу, смещение зонда можно контролировать, например, интерферометрическим способом. Например, можно применить волоконный интерферометр для контроля положения конца зонда относительно волокна, или можно применить интерферометр на основе призмы Волластона для контроля положения конца зонда относительно другой точки, или можно применить интерференционный микроскоп для контроля положения конца зонда, причем, в данном случае, оптическая интенсивность в поле зрения микроскопа в положении, которое соответствует концу зонда, будет изменяться в зависимости от вертикального положения данного зонда. Независимо от используемого способа в настоящее время можно получать изображение, которое будет соответствовать рельефу поверхности, что особенно важно для применения в метрологии.
Чтобы способствовать достижению соотношения Fdirect>kx, зонд следует дополнительно конструировать с относительно низкой пружинной жесткостью. Обычно, жесткость должна быть ниже, чем 1 Н·м-1, что можно обеспечить приданием зонду подходящей формы. В соответствии с настоящим изобретением отклонение зонда пригодно только для определения в пространстве положения, в котором находится зонд, т.е. силы взаимодействия между зондом и образцом, и, следовательно, для создания возможности съема изображения.
В одном опытном варианте конструкции зонда кантилевер обладает типичной пружинной жесткостью в интервале 0,01-0,06 Н·м-1. Допустимый интервал зависит от высоты подлежащих визуализации признаков (элементов). На элементе высотой 50 нм опытный вариант зонда будет вызывать восстанавливающую силу в интервале 0,5 нН - 3 нН. Продольная сила, которая прилагается к наконечнику, устанавливается порядка 1-100 нН в результате сложения силы, созданной капиллярной перетяжкой, и электростатической силы, например, такой силы, которая создается в установке, показанной на фиг.4, 5 и 7. Величину электростатической силы можно регулировать для оптимизации изображения. Данную силу настраивают так, чтобы для необходимого максимального ускорения отклика и, следовательно, максимальной скорости наконечника к наконечнику прикладывалось наибольшее возможное усилие, которое не повреждает или не разрушает исследуемую поверхность.
Возможность использования продольной восстанавливающей силы Fdirect вместо расчета на силу, формируемую кантилевером, представляет собой важное усовершенствование по сравнению с известным уровнем техники. С созданием зонда, который имеет меньшую способность к накоплению механической энергии, основными силами, действующими на зонд, становятся продольная сила Fdirect и сила, обусловленная мгновенным изгибом зонда поверхностью, при этом продольная сила Fdirect является превалирующей силой. Вышесказанное применимо независимо от того, является ли продольная сила «естественной» силой, вызываемой капиллярной перетяжкой, или дополнительной внешней силой, например, такой, которая прилагается с помощью магнитного шарика. В обоих случаях восстанавливающая сила имеет величину, которая, по существу, не зависит от положения зонда. Для противопоставления - величина восстанавливающей силы kx в известных из уровня техники устройствах зависит от смещения x кантилевера из его исходного положения. Следовательно, большие восстанавливающие силы формируются на особенно высоких участках образца. Соответственно, очень сложно обеспечивать, чтобы образцы не повреждались, если восстанавливающая сила имеет возможность изменяться описанным образом. Механизм восстановления, реализованный в соответствии с настоящим изобретением, характеризуется размерной характеристикой, которая в значительной степени не зависит от высоты образца.
Как показано на фигурах, прилагаемая сила необязательно должна быть магнитной силой, хотя предпочтительно, чтобы данная сила была представлена силой, величина которой не зависит от высоты образца. Обязательным условием является присутствие результирующей силы, направленной к поверхности таким образом, чтобы одна из сил, вызванных присущими зонду модами колебаний, не приводила к отрыву зонда от поверхности образца. Поэтому чем больше продольное усилие Fdirect, тем, по расчетам, менее строгим должно быть требование к поглощению и рассеянию энергии покрытием. В этом отношении, хотя и можно реализовать настоящее изобретение при помощи кантилевера с низким Q-коэффициентом на основе только капиллярной перетяжки в качестве источника
Fdirect, целесообразно также приложение внешней силы, не зависимой от отклонения. Зонд, который испытывает воздействие электростатических или магнитных сил, как показано для вышеописанных вариантов осуществления изобретения, является более управляемым и обеспечивает больше дополнительных возможностей для формирования изображений с максимальным качеством.
На фиг.9a-9f наглядно продемонстрировано преимущество рабочих характеристик зонда в соответствии с настоящим изобретением над традиционными устройствами AFM. Фиг.9a, 9b и 9c являются изображениями одного и того же участка поверхности, и аналогично все фиг.9d, 9e и 9f являются изображениями другого участка поверхности. Во всех случаях линейный масштаб равен 1 микрометру, и материалом отображаемой поверхности был кристаллический поли(этиленоксид) (PEO), закрепленный на стеклянной подложке. На фиг.9a и 9d представлены изображения, полученные с использованием зонда в соответствии с настоящим изобретением, тогда как на фиг.9b и 9e представлены изображения, полученные с использованием традиционного AFM, контролирующего изменения высоты зонда, и на фиг.9c и 9f представлены изображения, полученные с использованием традиционного AFM, контролирующего изменения отклонения. Для получения изображений, представленных на фиг.9a и 9d, AFM типа Veeco Dimension 3100™ с контроллером Nanoscope™ IV применили совместно с серийно выпускаемыми кантилеверами с покрытием из тонкослойной полимерной пленки. Образец устанавливали на микрорезонансный сканер, выполненный из кварцевого кристаллического резонатора и 5-микрометрового пьезоэлектрического блока (P-802 и E-505, Physik Instrument, Германия). Для сбора данных в случаях, представленных на фиг.9a и 9d, использовали контроллер для резонансного сканирования компании Infinitesima Ltd.
Фиг.9a и 9d построены из массива 128×128 пикселей за период только 14,3 мс, при этом скорость наконечника зонда в центре каждого изображения равна 22,4 см·с-1 и 16,8 см·с-1 соответственно.
Следовательно, настоящее изобретение дает возможность получать изображения площадей с размерами несколько микрометров за миллисекунды в отличие от традиционного AFM, в котором время съема изображения может быть больше 30 секунд. Хотя в продемонстрированных вариантах осуществления изобретения можно работать со скоростями сканирования наконечником, равными скоростям, применяемым в настоящее время в традиционной микроскопии AFM, данные варианты осуществления изобретения допускают скорости наконечника выше 0,1 см·с-1, и в зависимости от равномерности поверхности образца можно обеспечить скорости наконечника выше 50,0 см·с-1. Например, при скорости наконечника
22,4 см·с-1 площадь 4,4×4,4 микрометров можно отобразить за 14,3 мс и площадь 1,5×1,5 микрометров - за 8,3 мс. Кроме того, даже при данной скорости можно получать изображения мягкой полимерной поверхности с разрешением выше чем 10 нм по горизонтали и 1 нм по вертикали.
Дополнительно отмечено, что при данных скоростях наконечника зонда образец оказывается менее подверженным повреждениям, чем при меньших скоростях. Поскольку наконечник зонда пребывает в каждой точке меньше времени, то образец подвергается меньшей деформации и, следовательно, с меньшей степенью вероятности достигает точки, с которой образец начинает пластически деформироваться. Согласно настоящему изобретению поверхность образца может подвергаться скоростям сдвига около 108 м·с-1, которая является скоростью, при которой многие полимеры, например, обладают характеристиками стеклообразного состояния. В общем, установлено, что более высокие частоты могут перевести вязкоупругую жидкость в состояние ниже температуры стеклования и, следовательно, изменить свойства поверхности, которую зонд «просматривает», что в результате приводит к меньшим повреждениям образца.
Зонд в соответствии с настоящим изобретением выбирают с низким Q-коэффициентом, теоретически, таким, чтобы обеспечивалось критическое затухание любого вынужденного колебания. В соответствии с настоящим описанием наиболее предпочтительная система, причем такая, которая достаточно эффективна, чтобы обеспечить возможность усовершенствованного слежения с помощью естественной восстанавливающей силы, вызванной капиллярной перетяжкой, содержит на одной или обеих сторонах опорной пластины зонда покрытие из энергопоглощающего материала, например полимерной пленки. В качестве альтернативы, при приложении большой (или дополнительной) магнитной силы обеспечивается низкий Q-коэффициент путем разумного выбора формы зонда. Другой альтернативный вариант заключается просто в обеспечении низкого Q-коэффициента погружением зонда в вязкую/жидкую окружающую среду в процессе сканирования. Дополнительный альтернативный вариант заключается в изменении электронной настройкой свойств опорной пластины зонда, в котором, например, опорная пластина выполнена или содержит электрочувствительные материалы, к которым можно обратиться для обеспечения низкого рабочего Q-коэффициента.
Опорная пластина, наконечник зонда и любой дополнительный компонент, например магнитный шарик, теоретически являются малоинерционными. Это, естественно, увеличивает ускорение наконечника обратно к поверхности образца при данной восстанавливающей силе и, следовательно, лучше обеспечивает способность зонда отслеживать поверхность.
Опорная пластина может быть специальной конструкции, чтобы обеспечить идеальный отклик. А именно, чтобы минимизировать зависимую от направления восстанавливающую силу, вызванную изгибом при отслеживании образца зондом, и чтобы ослаблять колебательный отклик при отрыве зонда от поверхности (за счет низкого Q-коэффициента). В настоящем описании данная конструкция часто называется конструкцией кантилевера, но это просто потому, что используют модификацию известных из уровня техники AFM для упомянутой новой цели. В известных из уровня техники AFM применяется кантилеверный зонд. В контексте настоящего изобретения требуется лишь, чтобы наконечник зонда имел определяемое горизонтальное положение (в плоскости x, y) относительно образца и свободно перемещался в направлении z. Известный из уровня техники кантилеверный зонд AFM может легко выполнять упомянутую функцию, но он не является единственным решением.
Рассмотрим вариант осуществления изобретения, который содержит опорную пластину для наконечника зонда согласно фиг.10, где на виде сверху усложненных пластин представлены их различные возможные конструктивные особенности, которые помогают ослабить восстанавливающую силу и снизить Q-коэффициент. Описанное здесь полимерное покрытие можно использовать в сочетании с каждой конструкцией для дополнительной специальной доработки отклика. На фиг.10(c) показана пластина более традиционной формы, а на фигурах 10(a) и (b) изображены другие альтернативные варианты. На каждой конструкции выделены участки 1-4, при этом каждый участок выполнен со специфическими свойствами. Каждая схема (a)-(c) иллюстрирует, по меньшей мере, одну опорную пластину, продолжающуюся вперед из подложки.
Участок 1 во всех случаях является точкой поворота. А именно: участок, на котором кантилеверная пластина поворачивается по дуге. Следовательно, участок 1 характеризуется очень низкой пружинной жесткостью по оси z (теоретически <0,01
Н·м-1) и очень высокой пружинной жесткостью в плоскости x, y. Тем самым задается горизонтальное положение наконечника относительно положения подложки, но предусмотрена также возможность свободного перемещения перпендикулярно поверхности образца с небольшими отклонениями.
Участок 2 формирует базовую структуру пластины. Он должен быть не гибким на высоких основных резонансных частотах.
Участок 3 является участком изгиба, который позволяет наконечнику двигаться вверх и вниз и соединяет пластины с участком наконечника. Пружинную жесткость данного участка выбирают так, чтобы резонансная частота наконечника была выше быстродействия зонда, т.е. выше, чем полоса частот механического контура обратной связи. Данный участок должен также нести полимерное покрытие для амортизации в воздухе. Однако при визуализации в жидкости потребность в покрытии в основном устраняется энергорассеивающими свойствами жидкой окружающей среды.
Участок 4 является участком наконечника. Наконечник зонда прикреплен к нижней поверхности данного участка или образует ее часть. Площадь участка должна быть достаточно большой для того, чтобы его положение определялось системой определения положения, при этом данный участок при использовании оптического затвора и других оптических систем поля в дальней зоне, по существу, составляет в горизонтальном размере более нескольких микрометров.
В вариантах осуществления изобретения, в которых внешняя продольная (осевая) сила прилагается к зонду для поджима его к поверхности, элемент, чувствительный к данной силе, может располагаться на участке 4 наконечника, на участке 2 пластины или на обоих участках. Однако, в предпочтительном варианте, упомянутый элемент расположен на наконечнике.
На фиг.11 и 12 изображены примеры формирования низкой и регулируемой пружинной жесткости пластины. По существу, как показано на фиг.11, для этого формируют отверстия в необходимом месте опорной пластины. Конструкции, показанные на фиг.11(b) и (c), обеспечивают повышенную стабильность по горизонтали по сравнению с конструкцией, показанной на фиг.11(a). Форму отверстий можно изменять, например, как показано на фиг.12, для управления свойствами полимерного покрытия. А именно: отверстия изогнутой, квадратной и другой формы по-разному влияют на особенности формирования полимерного покрытия на поверхности пластины, что, в свою очередь, влияет на амортизирующие свойства кантилевера.
Преимущество обеспечения специальной конструкции опорной пластины зонда состоит в возможности четкого разделения требований к ослаблению колебаний и снижению зависимой от отклонения восстанавливающей силы. В частности, опорную пластину можно сконструировать так, чтобы при столкновении с возвышенным участком поверхности образца возбуждалась только основная мода. Следовательно, необходимо лишь обеспечить, чтобы пластина, например, благодаря ее покрытию обладала низким Q-коэффициентом для данной моды в отличие от касающегося нескольких мод требования к известной из уровня техники кантилеверной пластине.
Следует отметить, что устройства, показанные на фиг.2-7, приведены всего лишь для иллюстрации примеров AFM. Существует множество разных вариантов осуществления AFM, с которыми можно реализовать настоящее изобретение, причем без использования обычного управления с обратной связью высотой зонда в качестве основного способа получения изображения. Например, необязательна установка такого резонатора, как камертон. Предлагаемая система просто применена в данных вариантах осуществления для иллюстрации применимости настоящего изобретения к технологиям быстрого сканирования, использующим резонансные колебания. Настоящая система применима также к способам более медленного сканирования. В качестве альтернативы, можно осуществлять колебание зонда 22 вместо образца 14. При данном альтернативном варианте осуществления изобретения предполагается, что для контроля смещения зонда применяют оптические технологии, визуализирующие пучок, являющийся достаточно широким для охвата оси быстрого сканирования.
Отклонение/смещение зонда можно измерять с использованием других технологий, помимо оптического затвора. К альтернативным технологиям, известным в данной области техники, относятся интерферометрия и зонды с пьезоэлектрическими покрытиями, а также определение термических изменений выходной мощности излучения нагреваемого зонда. При использовании интерферометрии для контроля отклонения/смещения зонда можно выделять данные только рельефа поверхности образца из данных отклонения зонда, которые вследствие частот, на которые реагирует зонд, характеризуют как рельеф поверхности образца, так и частоты пространственных признаков (элементов). Кроме того, несмотря на предпочтительность применения пьезоэлектрических исполнительных органов для управления перемещением пластин с образцом/зонда, не исключено применение других исполнительных органов, основанных, например, на термическом расширении средства привода.
Хотя управление Q-коэффициентом зонда описано на примере создания энергопоглощающего покрытия на опорной пластине зонда, применимы другие средства управления его Q-коэффициентом, включая электронное управление.
Для отображения поверхностей с большей площадью, чем площадь сканирования зондом, можно построить и затем объединить отдельные последовательные изображения разных, обычно смежных площадей для построения изображения данной большей площади. Для перемещения зонда и/или пластин с образцом от одного отдельного изображения к другому до этапа точной регулировки положения для каждого отдельного изображения можно использовать шаговые двигатели или другие исполнительные органы. Теоретически, отдельные площади сканирования выбирают с таким перекрытием, чтобы обеспечить возможность визуального подтверждения согласования отдельных изображений.
При использовании камертона 16 это может быть один из множества серийно выпускаемых камертонов или камертон специальной конструкции для обеспечения заданной частоты колебаний. Подходящим примером является кварцевый резонатор камертонного типа с резонансной частотой 32 кГц. Камертон хорошо подходит для данного применения, поскольку он конструктивно обладает в высокой степени анизотропными механическими свойствами. Поэтому резонансные колебания камертона взаимно независимы и допускают раздельное возбуждение, и, следовательно, ограничиваются только колебаниями резонанса (или резонансов) в плоскости образца. Существенно то, что камертон 16 можно привести в резонирование по одному направлению и сканировать по другому направлению без взаимодействия между модами. Следовательно, это дает возможность стабильного быстрого перемещения образца 14 в то время, как данный образец исследуют зондом 22. Вместо камертона можно применить другие механические резонаторы, которые содержат аналогичное средство для вполне разделенных горизонтальных и вертикальных резонансных колебаний.
Настоящее изобретение не ограничено лишь работой AFM, но необходимо силовое взаимодействие между зондом и поверхностью образца. Однако данный режим работы можно сочетать с компонентами микроскопа, предназначенными для контроля других взаимодействий или показателей взаимодействия между зондом и образцом. Примеры других взаимодействий могут включать в себя оптическое, емкостное, магнитное, касательное силовое или термическое взаимодействия. К другим показателям взаимодействия относятся амплитуда колебания, сила постукивания или поперечная сила, емкостной или индуктивный электрические токи. Упомянутые разные режимы обычных зондовых микроскопов описаны, например, в заявке на патент Великобритании №0310344.7.
Взаимодействие зонда с поверхностью образца, которое используют в AFM, дает также возможность воздействия на свойства поверхности и, следовательно, преднамеренной «записи» информации на образец. Данная технология известна как нанолитография, и AFM широко применяются для данной цели. Например, подачей напряжения на токопроводящий кантилевер можно оксидировать участок металлического слоя образца полупроводниковой пластины. Другой пример, использующий двухфотонное поглощение и полимеризацию фоторезиста, описан в статье “Near-field two-photon nanolithography using an apertureless optical probe”, Xiaobo Yin et al., Appi. Phys. Lett. 81(19) 3663 (2002). В обоих примерах очень маленький размер зонда позволяет записывать информацию с исключительно высокой плотностью. AFM и кантилеверный зонд в соответствии с настоящим изобретением можно также выполнить с возможностью использования в нанолитографии. Возможность усовершенствованного отслеживания поверхности с использованием настоящего изобретения не только предлагает возможность записи за более короткое время, чем прежде, но также предлагает возможность повышения разрешающей способности, т.е. плотности записи. Чтобы сделать наконечник зонда более пригодным для использования в нанолитографии, можно выполнить его электропроводящим, можно нанести на него металлическое покрытие для усиления его оптического взаимодействия с поверхностью или можно нанести на него покрытие из молекул выбранного типа для использования в области литографии с жидкостным пером.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБНАРУЖЕНИЯ ДЛЯ ДИНАМИЧЕСКОГО ЗОНДА | 2009 |
|
RU2518859C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ЗОНДА | 2009 |
|
RU2512674C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С ДИСКОМ-НОСТИТЕЛЕМ С КАНТИЛЕВЕРАМИ ЛЕПЕСТКОВОГО ТИПА | 2005 |
|
RU2353918C2 |
| КАНТИЛЕВЕР ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2009 |
|
RU2423713C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2003 |
|
RU2334214C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОМПАКТНЫМ СКАНЕРОМ | 2012 |
|
RU2571449C2 |
| ОСТРИЙНАЯ СТРУКТУРА ДЛЯ СКАНИРУЮЩИХ ПРИБОРОВ, СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ И ПРИБОРЫ НА ЕЕ ОСНОВЕ | 2004 |
|
RU2349975C2 |
| ЗОНД ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2004 |
|
RU2320034C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЛЬЕФА ПОВЕРХНОСТИ И МЕХАНИЧЕСКИХ СВОЙСТВ МАТЕРИАЛОВ | 2010 |
|
RU2442131C1 |
| СПОСОБ СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ О ПОВЕРХНОСТИ ОБРАЗЦА | 1999 |
|
RU2145055C1 |
Изобретение относится к области атомных силовых микроскопов и зондам, применяемым в указанных микроскопах. Зонд для использования в атомном силовом микроскопе или для нанолитографии содержит силоизмерительный элемент, соединенный с наконечником зонда с радиусом наконечника 100 нм или менее. Силоизмерительный элемент имеет низкий коэффициент добротности для, по меньшей мере, одной моды колебаний силоизмерительного элемента, при этом указанный зонд выполнен таким образом, что при воздействии на зонд приложенной извне силы усилие смещения поджимает наконечник зонда или образец, или и тот и другой друг к другу с величиной, превосходящей восстанавливающую силу, возникающую вследствие смещения наконечника зонда при зондировании им образца. Коэффициент добротности можно снизить с нанесением на пластину покрытия из материала, рассеивающего механическую энергию. Цель изобретения - усовершенствование отслеживания поверхности образца зондом, ускорение получения сканированных изображений. 5 н. и 25 з.п. ф-лы, 17 ил.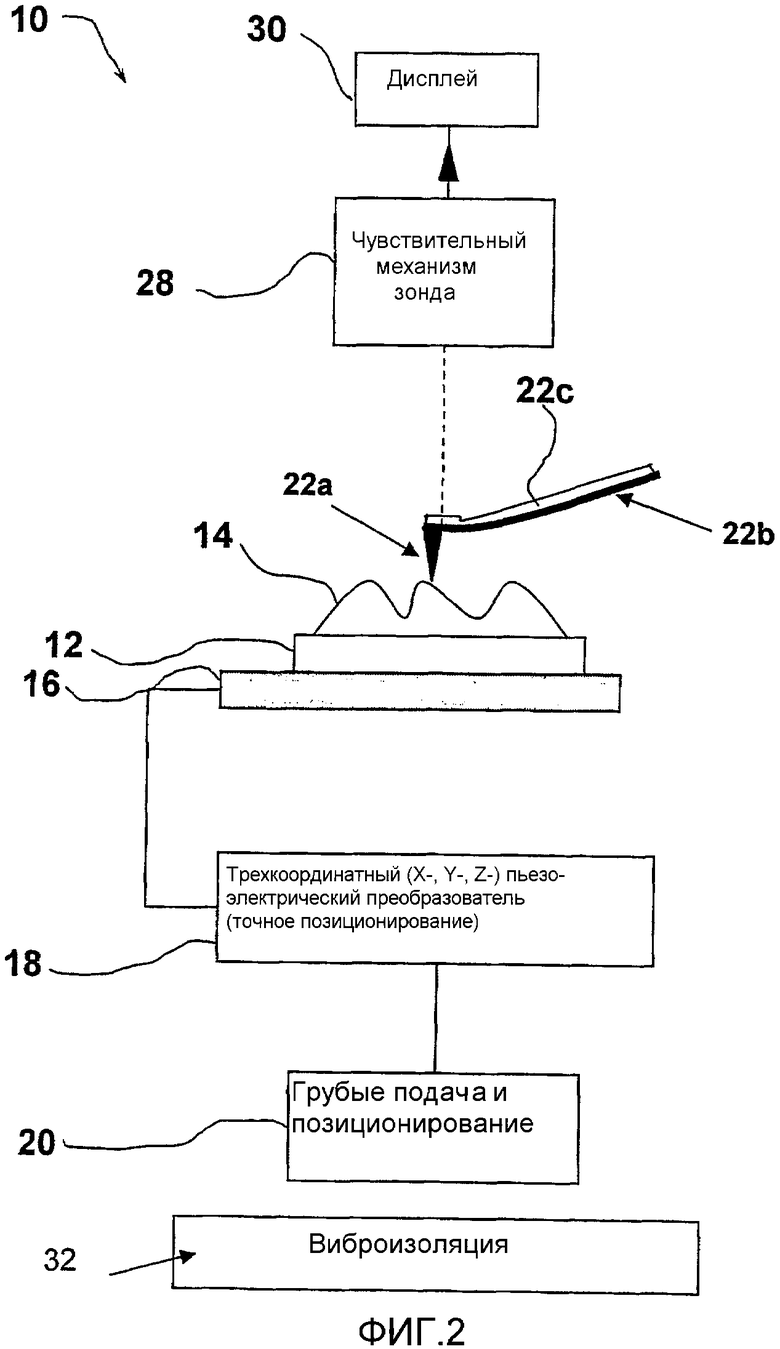
1. Зонд (22) для использования в атомном силовом микроскопе или для нанолитографии, при этом зонд содержит силоизмерительный элемент (3), соединенный с наконечником (4) зонда с радиусом наконечника 100 нм или менее, отличающийся тем, что указанный силоизмерительный элемент имеет низкий коэффициент добротности для, по меньшей мере, одной моды колебаний силоизмерительного элемента, при этом указанный зонд выполнен таким образом, что при воздействии на зонд приложенной извне силы усилие смещения поджимает наконечник (4) зонда, или образец, или и тот и другой друг к другу с величиной, превосходящей восстанавливающую силу, возникающую вследствие смещения наконечника зонда при зондировании им образца.
2. Зонд (22) по п.1, отличающийся тем, что зонд включает элемент смещения (24, 50), который чувствителен к приложенной извне силе, по существу, не зависимой от отклонения.
3. Зонд (22) по п.2, отличающийся тем, что элемент смещения содержит магнитный элемент (24), чувствительный к приложенной извне магнитной силе.
4. Зонд по п.3, отличающийся тем, что магнитный элемент (24) закреплен на силоизмерительном элементе (3) вблизи наконечника (4).
5. Зонд (22) по п.2, отличающийся тем, что элемент смещения содержит электропроводный элемент (50), выполненный с возможностью соединения с одним выводом источника питания (60) для подачи напряжения между зондом (22) и образцом.
6. Зонд (22) по одному из пп.2-5, отличающийся тем, что элемент смещения обеспечен вблизи наконечника (4) зонда.
7. Зонд (22) по п.1, отличающийся тем, что силоизмерительный элемент (3) содержит демпфирующий элемент (22 с), выполненный с возможностью рассеяния энергии, которая, в ином случае, накапливалась бы в механической форме в силоизмерительном элементе посредством возбуждения колебаний, по меньшей мере, одной моды.
8. Зонд (22) по п.7, отличающийся тем, что демпфирующий элемент (22 с) содержит покрытие из материала, поглощающего механическую энергию, на, по меньшей мере, одной стороне силоизмерительного элемента (3).
9. Зонд (22) по п.8, отличающийся тем, что материал, поглощающий механическую энергию, представляет собой полимерную пленку.
10. Зонд (22) по п.9, отличающийся тем, что полимерная пленка выполнена из сополимера с основным компонентом, которым является аморфный эластомер, и неосновным кристаллическим или стеклообразным компонентом.
11. Зонд (22) по п.9 или 10, отличающийся тем, что на силоизмерительный элемент (3) нанесено покрытие из полимера отливкой из раствора.
12. Зонд (22) по п.7, отличающийся тем, что демпфирующий элемент (22 с) образован участком (участком 3) силоизмерительного элемента (3), обладающим регулируемой пружинной жесткостью.
13. Атомный силовой микроскоп (10) для визуализации образца в соответствии с силой взаимодействия между образцом и зондом (22), при этом микроскоп (10) содержит
средство (16, 18, 20, 70) подачи, выполненное с возможностью обеспечения сканирующего движения зонда (22) и поверхности образца относительно друг друга и способное привести образец и зонд (22) в непосредственную близость, достаточную для создания различимого взаимодействия между ними; и
чувствительный механизм зонда (28), выполненный с возможностью измерения отклонения и/или смещения зонда (22);
отличающийся тем, что микроскоп (10) содержит зонд (22) по любому из пп.1-12.
14. Атомный силовой микроскоп по п.13, отличающийся тем, что дополнительно содержит резонансный вибратор, механически соединенный либо с зондом (22), либо со столиком с образцом для приведения зонда (22) и образца в колебательное движение друг относительно друга.
15. Атомный силовой микроскоп (10) для визуализации образца в соответствии с силой взаимодействия между образцом и зондом (22) с низким коэффициентом добротности, при этом микроскоп (10) содержит средство (16, 18, 20, 70) подачи, выполненное с возможностью обеспечения сканирующего движения зонда (22) и поверхности образца относительно друг друга и способное привести образец и зонд (22) в непосредственную близость, достаточную для создания различимого взаимодействия между ними; и
чувствительный механизм зонда (28), выполненный с возможностью измерения отклонения и/или смещения зонда (22);
отличающийся тем, что микроскоп (10) содержит средство (24, 26, 50, 60) формирования силы (Fdirect), расположенное так, что во время работы сила (Fdirect) прикладывается к образцу, или зонду (22), или к тому и другому, или между образцом и зондом (22), при этом указанная сила (Fdirect) направлена так, чтобы поджимать зонд (22) к образцу или наоборот.
16. Микроскоп по п.15, отличающийся тем, что сила (Fdirect) характеризуется величиной, которая, по существу, не зависит от величины отклонения зонда (22).
17. Микроскоп по п.16, отличающийся тем, что зонд (22) обладает пружинной жесткостью k, и характеристики зонда (22), и прилагаемое усилие (Fdirect) выбирают так, чтобы, по меньшей мере, в заданном временном масштабе прилагаемая
сила (Fdirect) была больше, чем восстанавливающая сила kx, обеспечиваемая отклонением х зонда (22) в то время, как данный зонд сканирует поверхность образца.
18. Микроскоп по п.17, отличающийся тем, что зонд (22) имеет пружинную жесткость k, которая меньше, чем 1 Н·м-1.
19. Микроскоп по п.17, отличающийся тем, что средство формирования силы (Fdirect) содержит магнит (26) и магнитный элемент (24), встроенный в зонд (22).
20. Микроскоп по п.17, отличающийся тем, что средство формирования силы (Fdirect) содержит средство (50, 60) для подачи притягивающего напряжения смещения между наконечником (4) зонда и образцом.
21. Микроскоп по п.15, отличающийся тем, что средство формирования силы (Fdirect) содержит окружающую среду образца, которая способствует образованию капиллярной перетяжки между зондом (22) и образцом, при этом капиллярная перетяжка обеспечивает упомянутую прилагаемую силу (Fdirect).
22. Микроскоп по п.21, отличающийся тем, что средство формирования силы (Fdirect) дополнительно содержит гидрофильную поверхность на упомянутом зонде (22).
23. Микроскоп по п.15, отличающийся тем, что дополнительно содержит средство (80) для погружения зонда (22) и образца в жидкость во время работы микроскопа.
24. Микроскоп по п.15, отличающийся тем, что силоизмерительный элемент (3) зонда (22) содержит демпфирующий элемент (22 с), выполненный с возможностью рассеяния энергии, которая, в ином случае, накапливалась бы в механической форме в силоизмерительном элементе (3) посредством возбуждения колебаний, по меньшей мере, одной моды.
25. Микроскоп по п.24, отличающийся тем, что демпфирующий элемент содержит покрытие из полимерного материала (22 с) на, по меньшей мере, одной стороне силоизмерительного элемента (3).
26. Микроскоп по одному из пп.15-22, отличающийся тем, что дополнительно содержит резонансный вибратор, механически соединенный либо с зондом (22), либо со столиком с образцом для приведения зонда (22) и образца в колебательное движение друг относительно друга.
27. Способ сбора данных изображения с площади сканирования образца с нанометрическими структурными признаками, при этом данный способ содержит следующие этапы:
(a) перемещают зонд (22), содержащий силоизмерительный элемент (3) с наконечником (4), с радиусом наконечника 100 нм или менее, в непосредственной близости от образца, чтобы можно было создать силу взаимодействия между зондом (22) и образцом;
(b) вызывают создание силы (Fdirect), по существу, не зависимой от отклонения, между образцом и зондом (22) таким образом, чтобы зонд (22) побуждался для перемещения к образцу (14) или наоборот;
(c) сканируют зондом (22) по поверхности образца или образцом под зондом (22), и при этом обеспечивают перемещение зонда (22) и поверхности образца относительно друг друга так, чтобы расположение линий сканирования обеспечивало охват площади сканирования, и обеспечивают рассеяние энергии, которая, в ином случае, накапливалась бы в силоизмерительном элементе (3) посредством возбуждения колебательных мод;
(d) измеряют отклонение и/или смещение зонда (22); и
(e) обрабатывают данные измерений, снятые на этапе (d) для выделения информации, касающейся нанометрических структурных признаков образца.
28. Способ по п.27, отличающийся тем, что перемещение зонда (22) и поверхности образца относительно друг друга на этапе (с) обеспечивают резонансным вибратором.
29. Сканирующий зондовый микроскоп (10) записи информации на образце посредством взаимодействия между образцом и кантилеверным зондом (22) АРМ с низким коэффициентом добротности, при этом микроскоп содержит средство (16, 18, 20, 70) подачи, выполненное с возможностью обеспечения сканирующего движения зонда (22) и поверхности образца относительно друг друга и способное привести образец и зонд (22) в непосредственную близость; и механизм записи зонда, выполненный с возможностью прерывистого изменения, интенсивности взаимодействия между зондом и образцом, обычно во временном масштабе короче одной линии сканирования и, следовательно, прерывистого изменения характеристики поверхности образца в месте расположения зонда;
отличающийся тем, что микроскоп (10) содержит средство (24, 26, 50, 60) формирования силы (Fdirect), расположенное так, что во время работы сила (Fdirect), по существу, не зависимая от отклонения, прикладывается к образцу или зонду (22), или к тому и другому, или между образцом и зондом (22), при этом указанная
сила (Fdirect) направлена так, чтобы вызывать перемещение зонда (22) к образцу или наоборот.
30. Микроскоп по п.29, отличающийся тем, что перемещение зонда (22) и поверхности образца относительно друг друга обеспечивают резонансным вибратором.
| US 6349591 B1, 26.02.2002 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП И СПОСОБ ИЗМЕРЕНИЯ СВОЙСТВ ПОВЕРХНОСТЕЙ ЭТИМ МИКРОСКОПОМ | 1996 |
|
RU2109369C1 |

