ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области сканирующих зондовых микроскопов (СЗМ), включая атомно-силовые микроскопы (АСМ), и более предпочтительно, к использованию Полуконтактного режима Пиковой Силы (Peak Force Tapping (PFT) mode) при работе АСМ, как описано в заявках США №61/417837, №.12/618641, №60/114399, для измерения свойств образцов при помощи режима PFT и, по меньшей мере, одного электрического, термического, микроволнового и оптического возбуждения образца, например.
УРОВЕНЬ ТЕХНИКИ
Сканирующие зондовые микроскопы (СЗМ), такие как атомно-силовые микроскопы (АСМ), представляют собой устройства, в которых обычно задействован зонд, имеющий острие, и которые приводят острие во взаимодействие с поверхностью образца при малом усилии для получения характеристик поверхности с детализацией до атомных размеров. Обычно зонд подводится к поверхности образца для определения изменений в характеристиках образца. Обеспечивая соответствующее сканирующее перемещение между острием и образцом, можно получить данные о характеристиках поверхности над конкретным регионом образца и составить соответствующую карту образца.
Стандартная система АСМ изображена схематически на Фиг. 1. АСМ 10 использует зондовое приспособление 12, включая зонд 12, имеющий кантилевер 15. Сканер 24 генерирует относительное перемещение между зондом 12 и образцом 22, пока измеряется взаимодействие зонд-образец. Таким образом, можно получить изображения или выполнить другие замеры образца. Сканер 24, как правило, состоит из одного или более приводных механизмов, которые обычно генерируют перемещение в трех взаимно ортогональных направлениях (XYZ). Часто сканер 24 является единым интегрированным блоком, который включает в себя один или более приводных механизмов для перемещения образца или зонда в трех осях, например пьезоэлектрический ламповый приводной механизм. Кроме того, сканер может являться концептуальной или физической комбинацией нескольких отдельных приводных механизмов. Некоторые АСМ разделяют сканер на несколько компонентов, например приводной механизм XY, который перемещает образец, и отдельный Z-приводной механизм, который перемещает зонд. Таким образом, измерительный прибор используется для создания относительного перемещения между зондом и образцом при измерении топографии или другого свойства образца как описано, например, в работах Хансма и др. (Hansma et. al) Патент США N1 RE 34489; Элингс и др (Elings et. al). Патент США №5,266,801; и Элингс и др. (Elings et. al) Патент США №5,412,980.
Стоит обратить внимание на то, что сканер 24 часто включает в себя пакет пьезоэлементов (часто называемый здесь «пьезопакет») или пьезоэлектрическую трубку, которая используется для генерации относительного перемещения между измерительным зондом и поверхностью образца. Пьезопакет - это устройство, которое перемещается в одном или нескольких направлениях, исходя из напряжений, подаваемых на электроды, расположенные на пакетах. Пьезопакеты часто используются в сочетании с механическими изгибами, которые служат для направления, ограничения и/или усиления движения пьезопакетов. Кроме того, изгибы используются для повышения жесткости приводного механизма в одной или более осях, как указано в заявке с серийным №11/687304, поданной 16 марта 2007 г., под названием «Сканер СЗМ быстрой развертки и метод его эксплуатации». Приводные механизмы могут быть соединены с зондом, образцом или и тем и другим. Чаще всего узел приводного механизма представлен в форме XY-приводного механизма, который приводит в движение зонд или образец в горизонтальной, или XY-плоскости, и Z-приводной механизм, который перемещает зонд или образец в вертикальном, или Z-направлении.
В общераспространенной конфигурации зонд 17 подсоединен к колеблющемуся приводному механизму или приводу 16, который используется для приведения в движение зонда 12 для колебаний на или в пределах резонансной частоты кантилевера 15. Альтернативные схемы размещения используются для измерения отклонения, скручивания или других характеристик кантилевера 15. Зонд 17 часто представляет собой кантилевер, изготовленный микротехнологическими методами, с интегрированным острием 17.
В большинстве случаев электронный сигнал передается с источника сигнала переменного тока 18 под управлением контроллера СЗМ 20, посредством чего приводной механизм 16 (или, как вариант, сканер 24) приводит зонд 12 в состояние колебания. Взаимодействие между зондом и образцом обычно управляется посредством обратной связи через контроллер 20. В частности, приводной механизм 16 может быть подсоединен к сканеру 24 и зонду 12, но может формироваться как единое целое с кантилевером 15 зонда 12 в составе самоприводного кантилевера/зонда.
Часто выбранный зонд 12 приводится в состояние колебания и контакта с образцом 22 по мере мониторинга характеристик образца в ходе обнаружения изменений в одной или нескольких характеристиках колебания зонда 12, как указано выше. В связи с этим приспособление для определения отклонения 25 обычно используется для направления луча в сторону тыльной части зонда 12, затем луч отражается в направлении детектора 26, такого как четырехквадрантный фотодетектор. Определитель отклонения часто является системой оптического рычага, подобно системе, описанной в Хансма и др. Патент США № RE 34,489, но могут быть и другие определители отклонения, такие как датчики деформации, емкостные датчики и т.д. Источником светового индикатора аппарата 25 является лазер, часто лазерный диод видимого или инфракрасного спектра. Луч светового индикатора также может генерироваться другими источниками света, например гелий-неонным или другим источником лазера, суперлюминесцентным диодом (СЛД), светодиодом, оптоволокном или любым другим источником света, который может фокусироваться на маленькой точке. Когда луч перемещается по детектору 26, соответствующие сигналы обрабатываются блоком обработки сигнала 28 (например, для того чтобы определить среднеквадратичное отклонение зонда 12). Сигнал взаимодействия (например, отклонение) затем передается контроллеру 20, который обрабатывает сигнал для определения изменений в колебании зонда 12. В целом контроллер 20 определяет ошибку в Блоке 30, затем генерирует сигналы управления (например, при использовании Блока 32 пропорционально-интегрального регулятора усиления) для поддержания относительно постоянного взаимодействия между острием и образцом (либо отклонением рычага 15), как правило, для поддержания заданных характеристик колебания зонда 12. Сигналы управления обычно усиливаются усилителем 34 высокого напряжения перед, например, приводом сканера 24. Так, контроллер 20 часто используется для поддержания амплитуды колебания на установленном значении As для обеспечения в целом постоянной силы между острием и образцом. В качестве альтернативы могут использоваться заданные фаза или частота. Контроллер 20 также в целом считается устройством обратной связи, когда управляющее действие заключается в поддержании постоянного целевого значения, определенного заданной точкой.
Также предусмотрена рабочая станция 40, в контроллере 20 и/или в отдельном контроллере или системе подключенных или автономных контроллеров, которая получает данные, собранные с контроллера, и управляет данными, полученными во время сканирования для выполнения управления данными, такого как выбор точки, подбор кривой, и действия по определению расстояния. Рабочая станция может хранить итоговую информацию в памяти, использовать ее для дополнительных расчетов и/или для ее отображения на подходящем мониторе, и/или ее передачи другому компьютеру или устройству по кабелю или беспроводным способом. Запоминающее устройство может состоять из любого читаемого компьютером носителя информации, примеры которого включают, но не ограничиваются этим, ОЗУ компьютера, жесткий диск, сетевой сервер для хранения информации, флеш-накопитель или компакт-диск.
АСМ могут быть предназначены для работы в разнообразных режимах, включая контактный режим и режим колебания. Работа осуществляется путем перемещения образца и/или зондового блока вверх и вниз относительно перпендикуляра к поверхности образца в ответ на отклонения кантилевера блока зонда, когда он сканируется по поверхности. Сканирование обычно происходит в плоскости «x-y», которая, по меньшей мере, в основном, параллельна поверхности образца, и вертикальное движение происходит в направлении «z», которое перпендикулярно плоскости «x-y». Обратите внимание на то, что многие образцы имеют неровности, кривизну и наклон, которые отклоняются от плоской поверхности, отсюда использование термина «в основном параллельна». При этом данные, связанные с таким вертикальным перемещением, могут храниться, а затем использоваться для построения изображения поверхности образца, относящегося к измеряемым характеристикам образца, например, топографии поверхности. В одном практическом режиме работы АСМ, известном как TappingMode™ (полуконтактный режим) АСМ (TappingMode™ является торговой маркой настоящего патентообладателя), острие приводится в состояние колебания при или в пределах резонансной частоты связанного кантилевера зонда, или его гармонического колебания. С помощью цепи обратной связи делается попытка сохранить амплитуду константы данного колебания, чтобы минимизировать «прижимную силу», т.е. силу, образующуюся в результате взаимодействия острие/образец, как правило, с помощью управления разделением острие-образец. Альтернативные схемы обратной связи сохраняют фазу и частоту колебания постоянной. Как и в контактном режиме, эти сигналы обратной связи затем собираются, сохраняются и используются как данные, характеризующие образец.
Независимо от режима работы, АСМ могут получать разрешение до атомного уровня по широкому спектру изоляционных или проводящих поверхностей в воздухе, жидкости или вакууме благодаря использованию пьезоэлектрических сканеров, детекторов отклонения оптического рычага и очень малых кантилеверов, изготовленных с помощью фотолитографических методов. Благодаря их разрешению и универсальности АСМ являются важными устройствами измерения во многих разнообразных сферах - от производства полупроводников до биологических исследований. Обратите внимание на то, что аббревиатура «СЗМ» и акронимы для конкретных типов СЗМ могут использоваться здесь для обозначения либо микроскопа, либо соответствующего метода, например, «атомно-силовая микроскопия».
Как и большинство измерительных устройств, АСМ часто требуют компромисса между разрешением и скоростью сбора данных. То есть некоторые существующие на данный момент АСМ могут сканировать поверхность с разрешением на уровне суб-ангстрем. Такие сканеры способны выполнять сканирование только относительно небольших участков образца, и даже при этом - только с очень низкой частотой развертки. Традиционно коммерческие АСМ, как правило, требуют общего времени сканирования в несколько минут, для того чтобы пройти зону в несколько микрон с высоким разрешением (например, 512×512 пикселей), и низкой прижимной силы. Практический предел скорости сканирования АСМ является максимальной скоростью, при которой AFM может быть отсканированным при сохранении прижимной силы, которая является достаточно низкой, чтобы не повредить или не причинить минимального повреждения острию и/или образцу. Были сделаны огромные шаги в этой области, где СЗМ достиг частоты развертки уровня видео с высоким разрешением для малых образцов и малых объемов сканирования.
Тем не менее, с учетом существующих ограничений, связанных с известными режимами работы, включая полуконтактный режим АСМ и контактный режим, существует потребность в улучшениях. Опять же, в контактном режиме боковое сканирование острия создает большие силы между острием и образцом, которое может исказить данные с обеих сторон. А при формировании изображения мягких образцов, таких как биологические образцы и полимеры, поверхность может быть повреждена, что лишает измерение смысла, или, по меньшей мере, сильно деформирована, тем самым значительно ухудшая разрешение. Обратите внимание на то, что термин «формирование изображения» используется здесь для указания на получение данных СЗМ в нескольких точках поверхности образца, в основном путем обеспечения относительного сканирующего движения между образцом и зондом, и соответственно взаимодействия образца и зонда.
Полуконтактный режим АСМ представляет собой метод малого усилия и является наиболее распространенным режимом работы АСМ для создания карт поверхностей образцов, особенно чувствительных образцов. Стандартное усилие на острие образца составляет около нескольких nN до десятков nN. К тому же колебание острия, в отличие от протаскивания острия, сводит к минимуму силу трения. В соответствии со сказанным выше, полуконтактный режим АСМ имеет недостаток в том, что режим характеризуется трудностью контроля нормального усилия, действующего на поверхности образца. Пользователь обычно старается выбрать заданную точку, которая является только небольшим отклонением вследствие колебаний атмосферного воздуха/амплитуды зонда, для того чтобы свести к минимуму силы взаимодействия острие-образец для получения наилучшего воспроизведения профиля образца. Дилемма, особенно для мягких образцов, состоит в том, что если сила формирования изображения будет слишком малой, то острие не будет прижиматься к образцу должным образом (т.е. поддерживать взаимодействие с образцом при сканировании), но если она будет слишком высокой, повреждение/деформирование образца может привести к тому, что изображение будет неточно отображать топографию поверхности. В целом, чем лучше контролируется это усилие (т.е. чем ниже его можно поддерживать), тем ниже вероятность повреждения образца и/или острия, и таким образом можно повысить разрешение.
Анализ сил острие-образец в каждом из этих режимов дает лучшее понимание ограничений каждого из них. Когда зонд взаимодействует с поверхностью посредством TappingMode™ (полуконтактного режима) АСМ или Jumping Mode™ (прыгающий режим) АСМ (см., например, Патенты США №5,229,606, 5,266,801 и 5,415,027, которые настоящим полностью включены посредством ссылки), острие периодически прикасается к поверхности. На Фиг. 2A изображен физический процесс в течение одного периода «Т» перемещения острия. На Фиг. 2A показана траектория острия со ссылкой на положение поверхности образца. На Фиг. 2B показана соответствующая сила взаимодействия в одно и то же время для траектории острия в разных положениях. В пиковых положениях Amax острие находится в наиболее удаленном положении от поверхности образца и не взаимодействует с образцом. Когда острие продолжает движение вниз в направлении горизонтальной оси (нулевое разделение острие-образец), оно подвергается действию ближней зоны силы Ван-дер-Ваальса Fa_vdw, что заставляет острие быстро входить в контакт с образцом вследствие притяжения Ван-дер-Ваальса. После соприкосновения с образцом острие продолжает находиться во взаимном отталкивании для временной зоны δТ. В это время острие постоянно контактирует с образцом. Положения ниже нуля показывают, что острие могло деформировать образец, что приводит к отображению его положения ниже поверхности образца.
По мере того как острие отдаляется от поверхности после δТ, сила притяжения создает капиллярный мениск, с проявлением максимальной силы адгезии Fa_max прямо перед отрывом мениска. Затем острие входит в область отсутствия взаимодействия и продвигается к положению максимального удаления.
В зоне без взаимодействия, когда зонд дальше всего от поверхности, сила взаимодействия равна нулю или достаточно близка к нулю, чтобы сформировать базовую линию, как указано на Фиг. 2B. На Фиг. 2B сила выше горизонтальной оси является отталкивающей, при том, что эти точки ниже горизонтальной оси представляют собой чистую силу притяжения или адгезии. Максимальная сила отталкивания Fr_max обычно соответствует самому нижнему или наименьшему положению острия или разделению относительно поверхности образца.
В предшествующих известных режимах, раскрытых в TappingMode™ (полуконтактном режиме) АСМ и Jumping Mode™ (прыгающем режиме) АСМ, амплитуда Amax или среднеквадратичное значение амплитуды колебания острия используется как параметр контроля обратной связи. Пример такого аппарата контроля обратной связи показан на Фиг. 1.
В традиционном контроле, обычно реализованном с помощью регулировки уровня цепи обратной связи, позиционирования приводных механизмов и определения компонента отклика кантилевера (квадрантный фотодетектор, например), АСМ использует обнаруженное отклонение зонда или сигнала среднеквадратичного значения, соответствующего перемещению кантилевера (напр., зонда), как указание на взаимодействие острие-поверхность, и использует цепь обратной связи для поддержания постоянного среднеквадратичного отклонения.
Однако основное ограничение традиционной АСМ заключается в ее неспособности собирать количественную информацию о механических свойствах одновременно с формированием изображений высокого разрешения. АСМ была предназначена в первую очередь для топографического формирования изображений. Был достигнут небольшой прогресс в создании количественных механических схем, включая эластичность, пластичность и работу адгезии.
Кроме того, в управлении TappingMode™ (полуконтактным режимом) используется амплитуда или фаза измеренного сигнала отклонения для управления взаимодействием острие-поверхность с помощью обратной связи. Примечательно, что и амплитуда, и фаза являются усредненными показателями колебания зонд/острие с использованием, по меньшей мере, одного цикла взаимодействия. В частности, среднее значение относится к взаимодействиям зонд/образец, происходящим во всех положениях траектории острия (Фиг. 2). Поэтому нет возможности для осуществления управления с обратной связью на основе фактически немедленного взаимодействия острие-образец. Обратите внимание на то, что немедленное взаимодействие относится к любой точке (например, в течение двух микросекунд) взаимодействия на Фиг. 2B (рассматривается далее).
Кроме того, важно отметить, что TappingMode™ (полуконтактный режим) АСМ был создан для преодоления явления, известного как состояние заклинивания, которое происходит, когда зонд прикасается к образцу прерывисто. Когда зонд прикасается к образцу, капиллярная сила направлена на то, чтобы захватить острие и не отпускать его. Амплитуда колебаний зонда в полуконтактном режиме упадет ниже нуля, тем самым приводя к обратному колебанию. Эта проблема была преодолена при использовании полуконтактного режима с помощью зондов, имеющих определенную жесткость, обычно от 10 Н/м (Ньютон/метр) до 60 Н/м, с номинальным значением 40 Н/м, при работе в полуконтактном режиме ACM (TappingMode AFM) с амплитудой колебаний выше, чем приблизительно 10 нм от пика до пика. В таких условиях, при прикосновении зонда к поверхности, кинетическая энергия полуконтактного зонда преобразуется в достаточное для преодоления капиллярной силы количество статической эластичной энергии, обеспечивая стабильную амплитуду в каждом цикле. Одним недостатком этого режима является то, что кинетическая энергия, накопленная в зонде, является также пропорциональной константе пружины кантилевера. При использовании кантилевера с меньшей константой пружины, такого как 1 Н/м, полуконтактный режим при измерении многих материалов невозможен, потому что кантилевер не может преодолеть силы капиллярной адгезии с помощью его собственной энергии резонансного колебания. Следовательно, большинство применений полуконтактного режима возможны только тогда, когда в нем используется жесткий кантилевер, широко известный в уровне техники как рычаг.
В попеременном режиме работы СЗМ, известном как импульсно-силовой режим или PFM (см., например, Патент США №6,880,386 и Патент США №7,129,486), амплитуда колебания зонда настроена таким образом, что острие входит и выходит из контакта во время каждого цикла. В этом режиме управление обеспечивается мониторингом сил взаимодействия острие-образец. Он работает на основе свойств, связанных с кривой силы, еще одного общего измерения, выполненного в сфере АСМ для измерения свойств материала в определенном месте. Измерения силы являются общими и могут быть распределены по всему образцу для создания того, что известно как объемно-силовое изображение.
В PFM, при анализе формы кривой сила-расстояние, и при использовании данных управления силами, действующими между острием и образцом, количество требуемых данных уменьшается по сравнению с другими режимами работы СЗМ. Важно, что режим работы PFM обычно должен соответствовать Fr_i (рассматривается ниже) или пиковой импульсной силе, которая значительно превосходит отклонение, вызванное адгезией, а также отклонения, вызванные соединениями. В результате требуется высокая сила отталкивания в качестве контрольной ссылки. Такая высокая сила может повредить образец или острие и, следовательно, помешать получению изображений высокого разрешения. Более того, PFM имеет другие ограничения, в частности касательно скорости работы и ограничений разрешения, и, таким образом, хотя она была реализована для формирования изображений мягких образцов, она не применялась шире для всех областей формирования изображения АСМ. Кроме того, формирование изображений в жидких средах представляет собой еще более трудную задачу для PFM, поскольку сила вязкости в жидкости создает большое отклонение, даже когда зонд кантилевера не взаимодействует с образцом.
В частности, основная причина ограничения скорости формирования изображения в стандарте PFM АСМ изображена на Фиг. 2C. Фиг. 2C является графиком силы взаимодействия острие-образец по отношению ко времени. Сила взаимодействия графически отображена как быстро вступающая в контактов «А», в момент чего сила отталкивания (образца от острия) инициируется в «В». Пиковая сила отталкивания наблюдается примерно в «С», поскольку силы адгезии притягивают к острию приблизительно до точки «D» - точки, на которой острие отходит от образца. Точка Е представляет пик отклонения зонда кантилевера, когда он отходит от образца. Обе точки С и Е представляются как пик сигнала отклонения. Для того чтобы удостовериться, что обратная связь управляет взаимодействием острие-образец правильно, значение С должно превышать Е. В еще одном ограничении в PFM требуется определенный период прямого вызова (циклы колебания зонда на резонансной частоте), перед тем как будет возможно определить базовую силу, необходимую для продолжения сканирования. Именно это ожидание «прямого вызова» кантилевера (процесс свободного затухания, как в полуконтактном режиме) ограничивает частоту модуляции и, следовательно, скорость сканирования. В частности, скорость модуляции значительно меньше, чем резонансная частота зонда (например, пятая часть или много ниже резонансной частоты образца).
В дополнение к вышеуказанным проблемам, монтаж и эксплуатация относительно сложного и универсального АСМ могут быть продолжительными и сложными, особенно для неопытного оператора АСМ и/или ученого или инженера, не знакомого со сложным метрологическим оборудованием. Например, значения параметров установки и эксплуатации обычно зависят от таких факторов, как тип материала образца, независимо от того, твердый он или мягкий, проводящий или непроводящий, органический, синтетический или биологический по природе, помимо всего прочего.
При других методах измерения, таких как сканирующая электронная микроскопия (СЭМ), образец можно легко загрузить в измерительный прибор и получить хорошее изображение при небольшой подготовке или квалификации пользователя. Однако АСМ часто является предпочтительным методом с учетом его способности выполнять широкий спектр измерений, включая многомерную топографию и замеры механических свойств (эластичность и т.д.). Несмотря на это, АСМ чаще всего требует экспертного знания инструмента и выполняемых измерений. В связи с этим пользователь должен определить интересующее его положение, подвести острие зонда к образцу (перемещая либо образец, либо зонд). Затем, после запуска режима измерительного сканирования, пользователь должен убедиться в том, что острие следует по образцу, поддерживая, согласно общим правилам, стабильность цепи обратной связи.
Более того, после выполнения измерения, часто представляет серьезную проблему интерпретация полученных данных. В целом это могут быть задачи, отнимающие много времени, очень часто требующие знаний и квалификации физика или инженера-электронщика, с ограничениями, присущими доверию человеческому суждению. Важно отметить, что поскольку АСМ имеет потенциал для широкого применения, было бы предпочтительным при проведении АСМ не полагаться на способность исполнителя выполнять операции экспертного уровня. Например, с учетом способности получать не имеющие аналогов измерения свойств материалов, включая карты образцов, биологи и эксперты материаловедения чаще использовали бы АСМ, если бы она была проще. В этом отношении простота использования повысится, если бы методика АСМ и/или метод работы могли минимизировать или исключить задачи, связанные как с а) поддержанием стабильности обратной связи при выполнении и подготовке измерений, так и b) интерпретацией полученных данных.
Для решения этих вопросов учитывались фундаментальные задачи, поставленные ACM и ее в настоящее время действующими рабочими режимами. Первоначально, с учетом поддержания стабильности в известных режимах АСМ, регулировка контроллера является критически важной. В большинстве существующих коммерческих систем пользователь должен контролировать как заданное значение, так и усиление (И (интегральное) и П (пропорциональное)). Учитывая заданное значение, управление зависит от режима. В контактном режиме прибор пытается поддерживать постоянную силу контакта между острием и образцом, который является относительно простым. Однако в большинстве распространенных режимов работы АСМ режим колебания или полуконтактный режим АСМ, описанный выше, контроль заданного значения (амплитуды или фазы полуконтактного сканирования), является сложным, потому что, по большому счету, не существует простой взаимосвязи между заданным значением и силами острие-образец. Такое же изменение заданного значения может указывать либо на высокую, либо на низкую силу взаимодействия острие-образец, с динамикой кантилевера (фундаментальная резонансная частота и т.д.), оказывающей сильное влияние, а также с учетом формирования изображения в разных средах (жидкость по сравнению с атмосферой, например).
Стабильная и оптимальная обратная связь также требует применения соответствующих усилений. В обычных условиях обратная связь станет нестабильной при высоком усилении и будет иметь пониженную способность отслеживания при низком усилении. Усиление П и И регулируются, при том что пользователь, как правило, использует метод проб и ошибок, дабы убедиться в том, что обратная связь остается стабильной, в то же самое время обеспечивая достаточную способность отслеживания. Тем не менее в полуконтактном режиме АСМ на динамику обратной связи сильно влияет заданное значение, т.е. такое же усиление уровня может демонстрировать разную стабильность обратной связи при заданном значении разной амплитуды. Поскольку усиления не работают независимо, процесс оптимизации усиления является сложным.
Стабильная обратная связь требует применения подходящего усиления при обнаружении отклонений в колебаниях от заданного значения. Усиление должно регулироваться для возврата колебания обратно к заданному значению. Усиления П и И настраиваются, при том что пользователь, как правило, использует метод проб и ошибок, для того чтобы убедиться, что обратная связь остается стабильной. И поскольку усиления работают не самостоятельно, задача является особенно сложной.
В ответ на потребность сферы метрологии в системе АСМ, которая поддерживала бы стабильную обратную связь с меньшим участием пользователя экспертного уровня, были предложены решения. Тем не менее каждое из них имеет значительные ограничения.
В работе Рифаи и Юсеф-Туми, озаглавленной «Об автоматизации атомно-силовых микроскопов: Подход адаптивного контроля», а также в работе Шниттера и др., озаглавленной «Высокоскоростная атомно-силовая микроскопия контактного режима для биологического образца путем контроля на основе модели», контроллеры на основе модели более высокого порядка используются вместо стандартного П/И-контроллера. Такие контроллеры трудно проектировать и они, по сути, являются несовершенными. Важно, что такие контроллеры требуют информации, относящейся к динамике системы до начала работы. Хотя они и могут быть эффективными при эксплуатации АСМ в контактном режиме, трудности, как правило, возникают при эксплуатации АСМ с помощью полуконтактного режима, при условии что, в соответствии с предположением выше, динамика системы будет изменяться с меняющимся заданным значением.
В работе Астром и Хагглунд используется стандартный П/И-контроллер, но подстройка, необходимая для стабильной работы, автоматизирована. Астром и Хагглунд применяют простые регуляторы с использованием уточнения фазы и пределов амплитуды. В данном подходе целевая система, как правило, представляет собой крупную установку с медленным реагированием. В частности, временная шкала реагирования обычно занимает от минут до часов. Такая характеристика, по сути, прямо контрастирует с системой АМС, в которой время реагирования составляет миллисекунды, а фактор качества реагирования высок (низкое рассеивание энергии). Другими словами, автоматическая подстройка контроллера, как учат Ангстром и Хагглунд (с помощью простых регуляторов с медленным временем реагирования), не будет работать для большинства целей АСМ.
В другой системе, описанной в работе Раиса и др. (Патент США №7,513,142), система работает на определение начала состояния нестабильности, а затем осуществляет корректировку. Однако, поскольку период времени между началом состояния нестабильности и неконтролируемой нестабильности (т.е. нестабильности при мощности, требующей остановки и перезапуска процесса измерения) столь короток, трудно осуществлять управление до того, как остановлен процесс измерения. Как это понимается в уровне техники, гистерезис является первоочередной причиной состояния, при котором система не способна реагировать достаточно быстро. Более того, в данном решении система принимает решение на основе измеряемого колебания. Определяется амплитуда допустимого шума, и если эта амплитуда будет превышена, система отрегулирует усиление. Один из основных вопросов относится к тому факту, что амплитуда шума столь сложна, в частности при эксплуатации АСМ в полуконтактном режиме при измерении определенных типов образцов. В АСМ при полуконтактном режиме колебание представляет собой нелинейное представление силы взаимодействия между острием и образцом. Таким образом, контроль амплитуды полуконтактного сканирования, например, обеспечивает непрямой контроль силы взаимодействия между острием и образцом. Такой непрямой контроль силы взаимодействия является чувствительным к воздействиям переменных, таких как гармоники колебания и колебания системы, включая сам пьезопривод и механические компоненты АСМ. Именно эта динамика полуконтактного режима чрезвычайно усложняет разработку сильного алгоритма управления, в частности, если формирование изображения происходит в разных средах.
В результате, притом что данная система не требует ввода пользователем информации для принятия решения, ее способность расшифровывать измеренные колебания и изменять управление, когда система находится в состоянии угрозы потери стабильности, ограничена. Кроме того, в полуконтактном режиме АСМ динамика системы зависит как от заданного значения (например, амплитуда или фаза), так и от усиления, что сильно затрудняет возможность разработки алгоритма управления, который может устранять нестабильности.
В результате, хотя в прошлом и были предприняты усилия для автоматической регулировки усиления АСМ, этот метод также оказался не особо эффективным. Известные методы могут не справиться с выполнением ни топографии образца, ни рабочих параметров, таких как заданное значение, гистерезис приводного механизма и форма острия, которые могут непредсказуемым и негативным образом повлиять на попытки поддерживать стабильность путем регулировки усиления. В итоге автоматическая регулировка усиления в целом неэффективна.
Опять-таки, в этом нет ничего удивительного, ввиду многочисленности параметров сканирования, которые должны приниматься во внимание при установке и эксплуатации АСМ, вмести с теми параметрами, которые могут потребовать регулировки при работе АСМ. Например, пользователю может потребоваться отрегулировать такой параметр управления сканированием, как заданное значение, скорость сканирования, пропорциональное усиление, интегральное усиление, частота привода, амплитуда привода и другие параметры. Без большой аккуратности, значительного опыта, и иногда - определенного везения может произойти повреждение острия, кантилевера или образца, могут быть получены плохие или непригодные результаты и, в случаях, когда кажется, что все работает хорошо, процент рабочей неэффективности может быть настолько высоким, что время сканирования будет далеким от оптимального; это является особо проблематичными для способов применения с высокой пропускной способностью, таких как применение в полупроводниковой промышленности.
При текущем положении вещей, если значение любого из нескольких взаимно отобранных параметров управления не равно или не находится в пределах приемлемого диапазона своего оптимального уровня, в итоге, вероятнее всего, будут получены несоответствующая производительность и неприемлемые данные. При этом сравнительно сложные взаимозависимости, существующие между определенными параметрами АСМ, часто требуют выполнения процедуры проб и ошибок, даже для самых опытных операторов АСМ.
При выполнении установки АСМ значения для нескольких параметров управления должны устанавливаться с усилением цепи обратной связи для разных рабочих режимов и других случаев, когда требуется настройка такого усиления. При установке должны учитываться и конфигурироваться такие параметры, как объем сканирования, число пикселей в строке, количество отсканированных строк, частота развертки, скорость сканирования острия, цифроаналоговое (ЦА) разрешение, Z-центральное положение, т.е. Z-центральное напряжение центра пьезоэлектрического привода Z рабочего диапазона, контроль износа острия и минимизация повреждения образца.
При настройке АСМ для работы в режиме колебания, таком как TappingMode™ (полуконтактный режим), настройка должна включать в себя выбор амплитуды и заданного значения, связанные с колебанием. Более того, исходные значения интегрального усиления (I-gain) и пропорционального усиления (P-gain) также задаются вручную. Выбор значений усиления может быть сложным, поскольку это в основном зависит от таких факторов, как характер используемого режима колебаний, топография образцов, твердости и/или неровности или любые другие механические характеристики образца и среды, в которой он находится, а также других факторов. Например, там, где усиление задано слишком низким, реагирование системы имеет тенденцию к относительному ослаблению, что может привести к недостаточно точному отслеживанию острием поверхности образца. Там, где усиление задано слишком высоким, цепь обратной связи может начать колебания или посыл обратной связи на себя, что может добавить значительное количество нежелательного шума генерируемому изображению образца.
Кроме того, настройка усиления вначале может быть тонкой, но это не подходит при изменении некоторых другие факторов, таких как топография. Например, когда образец относительно неровный, усиление, как правило, должно задаваться выше для отображения топографии с такими высокими характеристиками, при любом возникающим в результате допустимым повышением шума колебания обратной связи. Когда образец относительно гладкий или плоский, усиление должно устанавливаться на более низком уровне для минимизации шума. Удерживанием шума на низком уровне при низком усилении достигается лучшее разрешение плоских зон, таким образом позволяя АСМ лучше формировать самые мелкие детали изображения. Однако, как это понимается в данной сфере, избыточный уровень шума может негативно влиять на формирование изображений более плоских зон образца, когда первоначально высокие значения настройки усиления оказываются слишком высокими там, где образец становится более плоским. И наоборот, первоначально низкое значение настройки частоты затрудняет формирование изображения с более высокими характеристиками образца, создавая изображение со столь высокими характеристиками, которые либо искажаются, либо отсутствуют.
Такие условия настройки становятся еще более проблематичными при работе в режиме TappingMode™, поскольку самые высокие пригодные для использования уровни усиления, как правило, зависят от динамики кантилевера. Динамика кантилевера обычно представляет собой функцию свободной воздушной амплитуды полуконтактного сканирования и заданного значения, и поэтому подстройка усилений очень сложна, особенно для неопытных пользователей. Действительно, такие факторы, как динамика кантилевера и скорость реакции Z-приводного механизма могут создавать такие сложности при настройке исходного заданного значения и усилений, и оператор часто прибегает к методу проб и ошибок до тех пор, пока изображение начинает выглядеть хорошо.
К сожалению, вследствие взаимного влияния факторов пробы и ошибки могут продолжаться в течение долгого времени. Например, по мере снижения заданного значения усиление может задаваться более высоким, и наоборот. Однако когда более низкие усиления могут позволять использование более низкого заданного значения, что обычно, повышает скорость реакции кантилевера, также повысится частота генерации ошибок, что может создать нежелательный эффект размытости или, в противном случае, исказить изображение, создаваемое в ходе сканирования.
В итоге все это часто приводит к необходимости задания оператором некоторых первоначальных значений параметров, усилений и заданных значений, а затем выполняется ручная регулировка значения каждого из них, по одному, до тех пор пока не произойдет колебание и затем отход обратной связи. Притом, что данный процесс может быть достаточно хорош для опытных операторов АСМ, он является неэффективным, отнимающим много времени и, довольно часто, менее чем оптимальным. Кроме того, он никак не решает вопрос динамического характера формирования изображения АСМ, что часто требует от оператора либо изменять определенные настройки на ходу, во время работы, либо наблюдать за изображением, и т.п., затем возвращаться назад и повторно сканировать те части образца, которые были плохо отображены, с помощью отрегулированных значений параметра. Опять же, этот процесс может быть чрезвычайно медленным.
В итоге сфера сканирующей зондовой микроскопии имела потребность в том, что можно назвать решением типа камеры-«мыльницы» для формирования изображения и измерения механических свойств широкого спектра образцов, которое было бы простым в использовании, а также способным минимизировать силы, генерируемые при взаимодействии острия и образца, также поддерживая высокие скорости формирования изображений.
Более того, с учетом ограничений популярных режимов АСМ, включая полуконтактный режим, при котором производительность усреднена, что делает измерения определенных физических свойств невозможными (или по крайней мере очень ограниченными, используя малые амплитуды полуконтактного сканирования, и только с плоскими образцами, позволяющими работать в очень узкой зоне взаимодействия), возникла необходимость в решении, которое могло бы обеспечить возможность измерения ряда физических свойств для широкого выбора образцов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В предпочтительных вариантах осуществления изобретения, нашел применение новый режим работы АСМ, известный как полуконтактный режим пиковой силы (Peak Force Tapping (PFT) Mode™) (PFT Mode и PeakForce Tapping Mode являются товарными знаками компании Veeco Instruments Inc., Плейнвью, Нью-Йорк), по своему дизайну схемы управления, который сводит к минимуму необходимость наличия у пользователя опыта и квалификации. Режим PFT в основном устраняет необходимость в подстройке пользователем усиления при формировании изображения. Более того, Режим PFT дает возможность еще большего упрощения использования АСМ с помощью предоставления возможности автоматического управления параметрами работы, такими как заданное значение, Z-предел и частота развертки. При этом, в частности, измерение физического свойства образца может выполняться для широкого ряда образцов, с использованием разнообразных методов возбуждения зондов/образцов (электрических, электромагнитных, оптических и др. методов возбуждения).
В основном предпочтительные варианты ориентированы на АСМ, что ограничивает потребность в экспертных навыках пользователя и реализуется путем использования режима PFT, который работает, перемещая острие, по существу, перпендикулярно поверхности образца, приводя острие во взаимодействие с образцом, и затем отходя от образца. Цепь обратной связи использует силу мгновенного взаимодействия (например, по существу, ортогонально к поверхности образца) в любой точке взаимодействия, предпочтительно с использованием максимальной силы отталкивания. В этом новом режиме работы используется мгновенная реакция зонда при взаимодействии между острием и образцом (нет необходимости дожидаться прямого вызова как в предшествующих методах, существующий метод определяет базовую линию или нулевую точку силы и с приложением усилия, по существу, мгновенно переносит острие назад к поверхности) с помощью цепи обратной связи для поддержания стабильного взаимодействия и управления следованием острия на образце. Перемещая острие перпендикулярно поверхности образца, этот режим разделяет преимущества полуконтактного режима АСМ, что, по меньшей мере, по существу, исключает силы трения при растровом сканировании или других подобных перемещениях образца в плоскости XY. Кроме того, реализация этого режима минимизирует паразитное соединение таким образом, что можно достичь более чувствительного управления силой, чем при PFT и полуконтактном режиме АСМ (увеличение, по меньшей мере, на три (3) порядка). При этом формирование изображения при наименьшей известной в практике АСМ силе (с использованием альтернативной силы), реализуется и напрямую контролируется, таким образом позволяя АСМ обеспечивать улучшенные изображения высокого разрешения, превосходящие полуконтактный режим АСМ на скоростях, превышающих стандартные скорости полуконтактного режима АСМ (пропускная способность полуконтактного режима ниже 1 кГц).
Дополнительным преимуществом режима PFT является то, что каждый цикл вертикального перемещения создает кривую силы, или несколько кривых силы, на каждом пикселе, позволяя одновременный сбор и отображение данных о высоте и механическом свойстве. Поэтому этот метод называется полуконтактным режимом сканирования пиковой силы (PFT), поскольку он генерирует и анализирует каждую без исключения отдельную кривую силы, затем измеряет и управляет АСМ на основе соответствующих сил пикового взаимодействия в каждом случае полуконтакта острия с образцом, при скорости формирования изображения выше, чем скорость формирования изображения в полуконтактном режиме.
В соответствии с первым аспектом изобретения способ работы СЗМ включает генерирование относительного перемещения между зондом и образцом и определение перемещения зонда. Способ выделяет из определенного перемещения зонда, взаимодействие между зондом и образцом, которое является, по существу, независимым от паразитного отклонения зонда (т.е. паразитного перемещения кантилевера).
В другом аспекте изобретения способ работы СЗМ включает генерирование изображения при поддержании максимальной силы взаимного отталкивания между зондом и образцом, приблизительно составляющей не более чем 10 пН во время каждого цикла, по существу, перпендикулярного циклического перемещения острия относительно образца. Такая сила взаимодействия может напрямую контролироваться и точно калиброваться.
В соответствии с еще одним аспектом изобретения способ работы СЗМ включает в себя генерирование изображения в течение, по меньшей мере, 1 часа с пиковой силой менее 5 нН, без вмешательства пользователя, сохраняя разрешение изображения на уровне выше 5 нанометров независимо от среды, включая воздушную, газообразную, жидкую и вакуум.
В следующем аспекте изобретения способ работы СЗМ включает в себя генерирование, по меньшей мере, одной кривой сила-расстояние для каждого пикселя изображения. Кривая сила-расстояние может использоваться для выполнения точного измерения одного или более параметров адгезии Ван-дер-Ваальса, упругости, работы адгезии поверхности контакта острия и образца, пластичности, такой как жесткость и вязкоупругость.
В соответствии с другим аспектом изобретения способ полуконтактной пиковой силы при выполнении СЗМ включает в себя кантилевер с константами пружины, равными от 0,01 Н/м до 1000 Н/м (что обеспечивает возможность отображения механических свойств в диапазоне приблизительно от 10 кПа до 100 ГПа). Этот диапазон применяемых кантилеверов на несколько порядков величины шире диапазона кантилеверов, обычно применяемых в Контактном режиме АСМ (0,01-1 Н/м) и полуконтактном режиме АСМ (1 Н/м - 40 Н/м).
СЗМ, сконфигурированный на основе изобретения, мог бы использоваться для сканирования широкого ряда образцов, включая рельефные пластины, биологические образцы в воздушной и жидкой средах, полимеры, тонкие пленки и компоненты устройств хранения данных.
В соответствии с еще одним аспектом изобретения способ СЗМ включает в себя осуществление взаимодействие острия зонда с образцом, затем прекращение взаимодействия, завершающееся затуханием колебания зонда. После этого способ повторяет взаимодействие перед, по существу, завершением посыла сигнала затухания колебания зонда, и определяет перемещение зонда.
В другом аспекте изобретения способ работы сканирующего зондового микроскопа (ЗСМ) включает генерирование относительного перемещения между зондом и образцом, и затем детектирование перемещения зонда. При этом способ включает восстановление из продетектированного перемещения зонда, по существу, силы мгновенного действия между острием и образцом. Предпочтительно способ также автоматически контролирует этап генерирования для поддержания заданного значения обратной связи.
В другом аспекте изобретения цепь управления контролирует силу взаимодействия на предварительно заданной дистанции синхронизации. Дистанция синхронизации определяется как время с начала периода модуляции до времени, соответствующего моменту, выбранного для управления обратной связью. Мгновенная сила, возникающая в этот момент, используется как параметр управления обратной связью, часто выбираемый как момент, в который возникает пиковая сила отталкивания.
При этом полуконтактный режим осложняется а) непрямым управлением силой и b) резонансной динамикой кантилевера нескольких гармонических режимов. Другим серьезным недостатком является то, что ни амплитуда, ни фаза колебания зонда во время получения данных не имеют неизменного отношения к силе взаимодействия острия и образца. В результате этих осложнений в процессе оптимизации обратной связи для получения желаемого изображения должно использоваться субъективное суждение, которое часто предполагает, что пользователь должен быть экспертом в области АСМ для получения изображения высокого качества, с минимальной силой взаимодействия и с наилучшим образом стабилизированной (более сильной) обратной связью. Синхронизированный контроль пиковой силы предпочтительных вариантов осуществления изобретения (Режим PFT) устраняет осложнения благодаря динамике кантилевера, а также осложнения, вызванные резонансом кантилевера и его гармониками. Кроме того, в первый раз режим PFT использует силу взаимодействия напрямую как параметр управления обратной связью. Даже в контактном режиме АСМ постоянное движение отклонения кантилевера, происходящее в силу температурных и других системных факторов, делает невозможным точное управление силой. В полуконтактном режиме пиковой силы система заново устанавливает базовую линию отсутствия взаимодействия путем перемещения зонда далеко от образца в каждом периоде взаимодействия. Этот процесс позволяет точно определять силу взаимодействия каждый раз, когда зонд взаимодействует с образцом. Благодаря прямому управлению силой и устранению осложнений, возникающих из-за динамики кантилевера, критерий, необходимый для достижения наивысшего качества изображений, становится неизменным. В результате автоматизация контура управления может осуществляться с помощью разработки соответствующей компьютерной программы. Субъективное суждение опытного пользователя, основанное на его прошлом опыте, например, получения изображения подобного образца, для оптимизации характеристик обратной связи, также исключается.
В еще одном аспекте изобретения этап автоматического управления включает автоматическое определение минимальной силы взаимодействия, необходимой для управления, основанного на шумовом фоне системы. Именно эта минимальная сила взаимодействия может использоваться в качестве заданного значения в цепи управления обратной связью.
В еще одном аспекте изобретения этап автоматического управления включает определение нестабильности обратной связи с промежутками менее 5 периодов взаимодействий между острием и образцом (например, 2,5 мс) примерно в 100 раз быстрее, чем при визуальной оценке эксперта.
В еще одном аспекте изобретения этап автоматического управления включает автоматическое управление усилением в соответствующей цепи обратной связи.
В другом аспекте изобретения способ включает автоматическое управление Z-пределом и, опционально, автоматическое управление частотой развертки.
Эти и другие характеристики и преимущества изобретения будут выявлены для обладающих навыками в данной сфере благодаря следующему подробному описанию и прилагаемым чертежам. Однако следует понимать, что подробное описание конкретных примеров, при указании предпочтительных вариантов осуществления данного изобретения, дается для иллюстрации, а не ограничения. Многие изменения и уточнения могут быть сделаны в рамках настоящего изобретения без отступления от его сути, и изобретение будет содержать все подобные уточнения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предпочтительные иллюстрированные варианты осуществления изобретения, представленные в качестве примеров, отображены на прилагаемых чертежах, в которых одинаковые ссылочные номера обозначают одинаковые детали, и в которых:
На Фиг. 1 изображена блок-схема традиционного атомного силового микроскопа, соответствующим образом маркированная как «Предшествующий уровень техники».
На Фиг. 2A изображен график отделения острия и образца по отношению ко времени в режимах колебания АСМ.
На Фиг. 2B изображен график силы взаимодействия по отношению ко времени в режимах колебаний АСМ.
На Фиг. 2C изображен график кривой силы СЗМ, иллюстрирующий взаимодействие зонда и образца, «прямого вызова» и отображения второго взаимодействия зонда и образца.
На Фиг. 3 изображен график силы по отношению ко времени, иллюстрирующий определение мгновенной силы для управления обратной связью в соответствии с предпочтительными вариантами осуществления изобретения.
На Фиг. 4A схематически изображен график отклонения зонда по отношению ко времени, иллюстрирующий силу взаимодействия острия и образца, модулируемую периодически с паразитными колебаниями в системе.
На Фиг. 4B схематически изображен график отклика кантилевера зонда по отношению ко времени только с гидродинамическим фоновым колебанием из-за паразитных источников.
На Фиг. 4C изображен график ошибки отклонения по отношению ко времени после вычитания гидродинамического фонового колебания.
На Фиг. 5A-5C изображена серия графиков: а) отклика отклонения перед вычитанием фона; b) вычитаемого фона; и с) ошибки отклонения по отношению ко времени после вычитания гидродинамического фонового колебания.
На Фиг. 6A представлено схематическое изображение силы по отношению ко времени, иллюстрирующее способ получения средней базовой линии предпочтительного варианта осуществления изобретения.
На Фиг. 6B представлено схематическое изображение отделения острия зонда от образца по отношению ко времени.
На Фиг. 6C представлено графическое изображение отклонения кантилевера по отношению ко времени.
На Фиг. 7 схематически изображен график силы по отношению ко времени, иллюстрирующий метод предыдущего уровня техники для получения среднего значения силы во всем цикле (среднеквадратичное значение) для определения взаимодействия острия и образца.
На Фиг. 8A изображен график силы по отношению к кривой времени, иллюстрирующий стробирование средней силы отталкивания в соответствии с предпочтительными вариантами.
На Фиг. 8B изображен график входного сигнала синхронизации, отправляемого с откликом силы в результате взаимодействия острия зонда и образца для реализации стробирования средней силы отталкивания, в соответствии с предпочтительными вариантами осуществления изобретения.
На Фиг. 9А представлено схематическое изображение серии кривых силы, используемых при синхронном получении среднего значения, в соответствии с предпочтительными вариантами осуществления изобретения.
На Фиг. 9В представлено графическое изображение сигнала синхронизации, посылаемого с отклонением, действующим для кривой силы на Фиг. 9А.
На Фиг. 9С представлено графическое изображение сигнала кривой силы после нескольких циклов синхронного получения среднего значения на Фиг. 9А.
На Фиг. 10 изображена блок-схема АСМ, работающего в режиме PFT в соответствии с одним вариантом осуществления изобретения.
На Фиг. 11 изображена технологическая схема, иллюстрирующая способ в соответствии с предпочтительными вариантами осуществления изобретения.
На Фиг. 12А схематически изображена кривая силы, иллюстрирующая заданную точку системы и измеренное отклонение.
На Фиг. 12В представлено схематическое изображение ошибки обратной связи, полученной в соответствии со способами предыдущего уровня техники, управляющими работой АСМ, при возникновении усилия срабатывания после завершения цикла модуляции.
На Фиг. 12С представлено схематическое изображение ошибки обратной связи, подобной изображению на Фиг. 12В, в соответствии с предпочтительными вариантами осуществления настоящего изобретения.
На Фиг. 13 изображена схема процесса, иллюстрирующая метод в соответствии с предпочтительными вариантами осуществления изобретения, отображающими фоновое вычитание отклонения.
На Фиг. 14 изображена схема процесса, иллюстрирующая фоновое вычитание отклонения кантилевера с помощью синхронного усилителя, в соответствии с предпочтительными вариантами осуществления изобретения.
На Фиг. 15 изображена схема процесса, иллюстрирующая фоновое вычитание отклонения при нормальном процессе контакта.
На Фиг. 16 изображена схема процесса, иллюстрирующая фоновое вычитание отклонения в начале процессе сшивания.
На Фиг. 17 изображен график силы по отношению ко времени, иллюстрирующий базовый расчет в соответствии с предпочтительными вариантами осуществления изобретения.
На Фиг. 18 изображен график силы по отношению ко времени, иллюстрирующий алгоритм, используемый при определении мгновенной силы взаимодействия.
На Фиг. 19 изображена схема процесса, иллюстрирующая метод формирования изображения контроля мгновенной силы.
На Фиг. 20A и 20B изображены схемы, иллюстрирующие силу по отношению ко времени и z-положение, соответственно, при использовании формирования изображения контроля силы в соответствии с предпочтительными вариантами осуществления изобретения.
На Фиг. 21A и 21B представлены изображения АСМ, на которых показаны глубокие щелевые измерения, выполняемые с помощью полуконтактного режима АСМ, и режим контроля мгновенной силы в соответствии с предпочтительными вариантами осуществления изобретения.
На Фиг. 22A изображена схема силы по отношению к отделению острия зонда от образца, иллюстрирующая режим силы отталкивания малой амплитуды (СОМА), в соответствии предпочтительными вариантами.
На Фиг. 22B изображена схема, иллюстрирующая силу по отношению ко времени для режима СОМА.
На Фиг. 23A изображена схема силы по отношению к отделению острия зонда от образца, иллюстрирующая режим силы притяжения малой амплитуды (СПМА) в соответствии с предпочтительными вариантами осуществления изобретения.
На Фиг. 23B изображена схема, иллюстрирующая силу по отношению ко времени для режима СПМА.
На Фиг. 24A изображена схема сигнала отслеживания обратной связи по отношению к положению сканирования, показывающая профиль образца и соответствующий сигнал отслеживания (высоту) при формировании изображения АСМ, с иллюстрацией разницы между стабильной или нестабильной обратной связью.
На Фиг. 24B изображена схема сигнала ошибки обратной связи, соответствующей сигналу высоты на Фиг. 24A.
На Фиг. 25 изображена схема амплитуды спектра по отношению к частоте, иллюстрирующая спектр сигнала обратной связи, который используется для определения нестабильности цепи обратной связи, в соответствии с предпочтительным вариантом осуществления изобретения.
На Фиг. 26A-26D изображена серия схем, иллюстрирующих определение сброса, указывающее на то, что сила взаимодействия между острием зонда и образцом находится примерно на базовом уровне при выполнении сброса.
На Фиг. 27 изображена схема АСМ в соответствии с предпочтительными вариантами осуществления изобретения, иллюстрирующая управление усилением в цепи обратной связи.
На Фиг. 28 изображена схема алгоритма определения колебания на Фиг. 27.
На Фиг. 29 представлено схематическое изображение данных, повторно собранных и обработанных алгоритмом определения колебаний на Фиг. 28.
На Фиг. 30 изображена схема, иллюстрирующая реализацию предпочтительного варианта осуществления работы АСМ в Режиме PFT.
На Фиг. 31 изображена схема процесса алгоритма управления частотой развертки для использования в Режиме PFT.
На Фиг. 32A изображена схема силы взаимодействия острия и образца, когда частота развертки, по существу, оптимизирована.
На Фиг. 32B изображена схема силы взаимодействия между острием и образцом, когда частота развертки, по существу, не оптимизирована.
На Фиг. 33 изображена схема, иллюстрирующая метод управления Z-пределом в соответствии с предпочтительным вариантом осуществления изобретения.
На Фиг. 34 изображена схема силы взаимодействия между острием и образцом, иллюстрирующая мониторинг радиуса острия с помощью методов предпочтительного варианта осуществления изобретения.
На Фиг. 35(a)-(d) изображена серия схем использования Режима PFT для измерения физических свойств образцов.
На Фиг. 36(a)-(d) изображена серия схем, подобных схемам на Фиг. 35(a)-(d), где сигнал возбуждения остается постоянным.
На Фиг. 37(a)-(d) изображена серия схем, подобных схемам на Фиг. 35(a)-(d), с помощью альтернативного участка стробирования.
На Фиг. 38(a)-(d) изображена серия схем, подобных схемам на Фиг. 35(a)-(d), с помощью другого альтернативного стробированного участка.
На Фиг. 39 изображена блок-схема СЗМ, использующего Режим PFT для измерения физических свойств образца с помощью смещающего напряжения для генерации сигнала датчика тока.
На Фиг. 40 изображена блок-схема СЗМ, использующего Режим PFT для измерения физических свойств образца с помощью термического возбуждения; и
На Фиг. 41 изображена блок-схема СЗМ, использующего Режим PFT для измерения физических свойств образцов, например, при использовании одного из оптических, магнитных и электромагнитных источников или источников возбуждения напряжения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Предпочтительные варианты ориентированы на полуконтактный режим сканирования пиковой силы (PFT) при работе АСМ, когда осуществляется мониторинг и используется сила взаимодействия между зондом (острием) и образцом для управления отделения острия зонда и образца при очень низкой силе, хотя и без потери скорости сканирования. Приемы, описанные здесь, обеспечивают высокое разрешение благодаря удержанию низкого уровня сил между острием зонда и образцом, реализуют отображение свойств поверхностей образцов практически в реальном времени. Предпочтительные варианты осуществления изобретения в основе своей стабильны и, таким образом, облегчают долгосрочный контроль силы, поддерживая способность собирать данные высокой достоверности (улучшенного разрешения). Более того, поскольку подстройка не требуется, в отличие от традиционного полуконтактного режима TappingMode™ ACM, настройка ACM осуществляется быстрее и проще, чем в других режимах АСМ. Основные принципы, управляющие Режимом PFT, изображены графически и рассмотрены в настоящем документе.
Практически, перед выполнением управления АСМ с помощью мгновенной силы взаимодействия, нужно было решить три основных вопроса. Этими вопросами были: 1) устранение фона отклонения при соединении; 2) определение базовой линии, и 3) определение мгновенной силы, как определено в в данном описании.
На Фиг. 2A цикл модуляции, при которой зонд приближается и отдаляется от образца (например, использование привода для цикличной модуляции отдаления острия от образца), представлен периодом «Т». Нулевое положение (горизонтальная ось) представляет поверхность, тогда как вертикальная ось является отдалением. Когда отдаление зонда от образца пересекает горизонтальную нулевую линию, острие находится в непосредственном контакте с образцом, как показано на участке 5Т (окно контакта между острием и образцом). Сила взаимодействия, соответствующая этому участку, схематически представлена на Фиг. 2B.
На Фиг. 2A и 2B Amax - это максимальное отдаление острия зонда от образца; Fa_vdw - сила адезии Ван-дер-Ваальса; и Fa_max - максимальная адгезия в связи с капиллярным взаимодействием и работой адгезии между острием и поверхностью образца. Сила отталкивания и сила адгезии рассчитываются относительно базовой линии, как показано на Фиг. 2B. Следует отметить, что сила, упоминаемая здесь, является общей силой, действующей на все острие, которое обычно имеет пирамидальную форму. Практически часть самого острия может войти в зону отталкивания, тогда как общая сила остается силой притяжения. В таком случае обратная связь может использовать силу отталкивающего взаимодействия острия в заранее определенном (как указано выше) положении синхронизации для обратной связи, даже если общая сила в данной точке будет силой притяжения. Это обеспечит преимущество при работе с минимальной силой взаимодействия с самым высоким разрешением изображения, поскольку управление определяется отталкивающим взаимодействием острия, которое возникает из-за эффекта отталкивания Паули и ионного отталкивания между атомами кончика острия зонда и атомов или молекул образцов.
Важно различать отклонение кантилевера и силу взаимодействия острия и образца. При использовании отклонения кантилевера для измерения силы взаимодействия острия зонда и образца не все отклонение представляет силу взаимодействия острия и образца; а именно, паразитные силы оказывают воздействие на отклонение кантилевера. Например, как показано на Фиг. 2C, отклонение кантилевера схематически изображено как функция времени, и рисунок отражает реальные данные отклонения. Колебания после точки «D» происходят в силу свободного затухания резонанса кантилевера во времени. Это отклонение резонанса не вызывается взаимодействием острия и поверхности и считается влиянием паразитного отклонения (обычно соответствующего паразитному кантилеверу или перемещению зонда). Точка «Е» представляет собой максимальную точку отклонения, при которой острие не взаимодействует с образцом. «Плоский» участок, представленный данными, также может иметь более медленное изменение отклонения, когда острие не взаимодействует с образцом, что вызвано механическим соединением паразитных сил. Такое соединение может быть вызвано модуляцией самого приводного механизма и/или откликом кантилевера в связи с демпфирующими силами в воздухе или жидкости. Это также может произойти из-за лазерных помех. Эти паразитные эффекты будут отражены в дальнейших фигурах.
В известных системах контроля сил контроль основан на максимальной силе, возникающей на протяжении периода. Отсюда следует, что для определения точного взаимодействия между острием и образцом сила отталкивания должна быть выше, чем любое из паразитных воздействий на отклонение, то есть она дифференцируется от паразитных сил и исторически используется цепью обратной связи. Такая необходимость дифференциации силы требует относительно высокой силы формирования изображения, что может повредить острие и/или образец, таким образом препятствуя системе в достижении высокого разрешения.
В предпочтительном варианте осуществления изобретения среднеквадратичное значение или постоянное отклонение заменяется силой мгновенного взаимодействия Fr_i, определенной в соответствии с Фиг. 3, с установленной точкой контроллера, составляющей:

Fbaseline - сила взаимодействия при отсутствии контакта зонда с образцом. Она должна равняться нулю. В АСМ сила обычно представлена отклонением кантилевера. В этом случае Fbaseline соответствует отклонению кантилевера, когда острие не взаимодействует с поверхностью. Fr_i - сила взаимодействия острия, которое находится в непосредственном контакте с поверхностью. Алгоритм синхронизации используется для выравнивания времени начала каждого приводного периода, чтобы участок δТ (Фиг. 2A-2B) совпадал с силой отталкивания и ее максимальным значением Fr_max. Время с начала периода до достижения Fr_max является временем синхронизации, которую можно точно определить и контролировать (описывается более подробно ниже). Интервал времени синхронизации (Интервал Синхронизации) может быть определен путем определения отставания фазы между откликом отклонения и сигнала привода модуляции. После определения Интервала Синхронизации (когда зонд находится в стационарном положении в направлении xy), аналогичный Интервал Синхронизации используется по всех положениях растрового сканирования xy. При формировании изображения обратная связь работает на поддержание Fr_i практически постоянной, тогда как значение Fr_i определяется Интервалом Синхронизации. Обратите внимание на то, что Интервал Синхронизации также может быть обобщен как интервал с начала периода модуляции до момента взаимодействия.
Интервалом Синхронизации можно управлять с высокой точностью. Например, если период колебания острия «Т» составляет 100 мкс при интервале синхронизации 48 мкс, сила взаимодействия, возникающая на 48-й мкс, будет использоваться как параметр управления обратной связью. Задачей цепи обратной связи будет поддержка мгновенной силы взаимодействия Fr_i (i=48 мкс) на 48-й мкс с начала периода. При более общих видах применения любая точка силы взаимодействия в пределах участка взаимодействия δТ может использоваться для обратной связи. δТ также выходит за участок, обозначенный на Фиг. 2B, включающем участок Fa_vdw (сила притяжения Ван-дер-Ваальса) и Fa_max (участок капиллярной адгезии). Участок капиллярный адгезии может также оказывать адгезивное взаимодействие из-за силы связи, возникшей в результате применения функционализированных зондов и специфических связей на образце.
Для того чтобы достичь точного измерения базовой линии, собирают данные о точках многочисленных отклонений, когда острие не взаимодействует с образцом и используется для формирования усредненного уровня базовой линии. При этом участок отсутствия взаимодействия (самое большое отдаление/самый высокий интервал) может определяться Интервалом Синхронизации, потому что такой участок должен располагаться примерно в половине цикла периода модуляции после положения пиковой силы. Интервал синхронизации также определяет рабочую точку силы обратной связи, и фактическая сила измеряется δFr. δFr может быть отрицательной или положительной.
Из-за адгезивных воздействий дрейфа (например, термического) на сигнал смещения соответствующая сила Fr_i может изменяться во времени. Относительную силу δFr (относительную определению базовой линии) предпочтительно использовать для управления обратной связью, вместо Fr_i, поскольку это будет более точным отражением взаимодействия между острием и поверхностью. Это относительное значение устраняет негативные влияния дрейфа системы на отклонение кантилевера.
δFr также представляет контролируемую силу цепью обратной связи, так, что 8Fr остается постоянной с течением времени в разных положениях, когда зонд сканирует поверхность образца.
На Фиг. 4A-4C отклик кантилевера, при взаимодействии с поверхностью образца, отображает сочетание силы взаимодействия острия с поверхностью и фонового соединения. Такой отклик системно отражен на Фиг. 4A как «Оригинал». Реальная сила взаимодействия между острием и образцом возникает только на участке Fr_i (показан на Фиг. 4C), который скрыт на фоне движения паразитного кантилевера или движения зонда. При вычитании фона из оригинальных данных (например, движение зонда, в том числе посредством сил взаимодействия и паразитных сил) можно получить величину силы взаимодействия. Фон, изображенный на Фиг. 4B, может стать причиной механического соединения резонансов от систем АСМ и/или отклика кантилевера на его среду, такую как воздух и жидкость. Также его могут вызвать лазерные помехи при движении кантилевера относительно образца. Общей характеристикой фона является то, что отклонение кантилевера, отображающее периодическое изменение, подобно траектории зонда, даже когда острие не взаимодействует с образцом. Успешное вычитание фоновых внешних данных показано на Фиг. 5A-5C.
В частности, на Фиг. 5A показано схематическое изображение первоначального отклонения зонда по отношению ко времени. Как отмечается, на отклонение зонда сильно влияют паразитные источники, которые могут использоваться для управления взаимодействием зонда и образца. Как показано, эти периодические паразитные отклонения представлены сигналом низкой частоты, который мы упоминаем здесь как, например, «гидродинамический фон», или «паразитная сила» - в более широком смысле. Влияние этих паразитных сил (включая гидродинамические силы, тяговые силы и воздух, движение вне оси, помехи от лазера и любое другое периодическое движение, происходящее, когда зонд не взаимодействует с образцом) на отклонение зонда велико. Фактическая сила взаимодействия зонда и образца, которая должна использоваться в качестве сигнала управления в предпочтительных вариантах осуществления изобретения, налагается на паразитный фоновый сигнал (Фиг. 5B), поэтому определение фактических сил взаимодействия между зондом и образцом может оказаться непростой задачей. Говоря другими словами, минимальная контролируемая сила определяется фоновым влиянием на отклонение зонда (показано на Фиг. 5A как Минимальная Контролируемая Силэстар. «Min. Controllable ForceOLD» - диапазон от примерно менее 1000 микроньютон до менее чем 10 пиконьютон). Примечательно, что, как всегда в таких случаях, присутствует шумовой сигнал «N», имеющий низкую амплитуду как относительно влияния паразитной силы на отклонения, так и относительно влияния на отклонение, оказываемого силой взаимодействия между зондом и образцом.
Если обратиться к Фиг. 5B и 5C, то одним ключевым принципом предпочтительных вариантов является вычитание паразитного фонового сигнала (Фиг. 5B) из сигнала отклонения, как отмечается, при этом понижая минимальную контрольную силу. Фоновый сигнал определяется значительным повышением отдаления зонда от образца до контролируемого расстояния, настолько, чтобы зонд взаимодействовал с образцом, т.е. только паразитные силы оказывают влияние на определяемое отклонение зонда. Контролируемая дистанция, как правило, больше 100 нм, хотя оно может быть и меньше, в идеале являясь дистанцией, на которой силы дальнего взаимодействия не оказывают влияния на отклонение зонда. Как показано на Фиг. 5C, влияние силы взаимодействия между зондом и образцом на отклонение после вычитания паразитного фона передает сигнал отклонения, имеющий четкие пики, связанные с взаимодействием между зондом и образцом.
Обратите внимание на то, что непериодический шум всегда будет присутствовать, и в этом случае определять минимальную контролируемую силу, как показано на Фиг. 5C (Минимальная Контролируемая Сила нов. (Min. Controllable ForceNEW)), - для очень мягкого кантилевера с константой пружины 0,01 Н/м и длиной кантилевера, составляющей 100 нм, такая сила может составлять приблизительно 1 пН.
Становится понятным, что минимальная применимая контролируемая сила при выполнении вычитания паразитного фона значительно снижается (примерно на три (3) порядка), позволяя, при применении предпочтительных вариантов осуществления изобретения, контролировать отдаление острия от образца, таким образом, что силы взаимодействия между зондом и образцом снижаются до уровня пН. Способ, с помощью которого может быть выполнено вычитание на оборудовании, будет описано подробнее ниже, в части Фиг. 10.
В целом, в первую очередь именно эта способность определять столь малые силы и использовать такие силы в качестве параметра управления в цепи обратной связи СЗМ позволяет осуществлять работу СЗМ в соответствии с настоящим изобретением для формирования изображения образца, что приводится здесь как «мгновенный контроль силы». Мгновенный контроль силы с помощью определения силы в реальном времени позволяет совершенствовать управление, таким образом совершенствуя разрешение изображения и сводя к минимуму вероятность повреждения образца. В данном контексте мгновенное определение силы или определение ее в реальном времени подразумевает, что, по сути, каждая точка изменяющейся силы, отображенная, например, на Фиг. 3, может определяться предпочтительными вариантами осуществления изобретения и использоваться мгновенно для контроля работы СЗМ. Другими словами, изменяющиеся силы, действующие на зонд по причине взаимодействия между зондом и образцом во время каждого цикла взаимодействия между зондом и образцом [или во время каждого цикла модуляции разделения между ними, т.е., модуляции кривой силы], определяются и могут использоваться АСМ для формирования изображения образца в реальном времени. Такой мгновенный контроль силы используется для обеспечения управления АСМ в любой точке взаимодействия в рамках того, что могло бы быть одним циклом модуляции разделения зонда и образца. Поскольку контроль обеспечивается до завершения любого предполагаемого цикла модуляции (до следующего сближения), задержка обратной связи значительно сокращается. Это будет показано позже в части Фиг. 12A, 12B и 12C.
Еще одно преимущество управления полуконтактным сканированием пиковой силы заключается в том, что оно не нуждается в эксплуатации при частоте, близкой к резонансной частоте кантилевера. Такая процедура может значительно сократить задержку кантилевера благодаря переходному резонансному отклику, делая возможным управление мгновенным взаимодействием.
Далее, как показано на Фиг. 6, предпочтительные варианты осуществления изобретения также позволяют АСМ работать на высокой скорости благодаря выполнению усреднения базовой линии кривой силы для быстрого выведения точки нулевой силы и предоставления системе возможности заставить зонд взаимодействовать с образцом при малой временной задержке. В отличие от предыдущих методов, представленных на Фиг. 2C, частота модуляции текущего АСМ не ограничивается требованием, чтобы система ожидала восстановления взаимодействия между зондом и образцом до тех пор, пока «прямой вызов» зонда не завершит (после того как острие зонда отскочит от поверхности образца, с затуханием колебания зонда до приблизительно l/е) стабилизацию системы формирования изображения. Время, необходимое для прямого вызова, определяется динамикой кантилевера, которая пропорциональна Q/f, где Q - коэффициент качества кантилевера, a f - резонансная частота кантилевера; как правило, составляет десятки миллисекунд для стабилизации общепринятого используемого кантилевера. В предпочтительных вариантах, как показано на Фиг. 6, после прямого вызова несколько циклов резонансной частоты кантилевера усредняются для определения точки нулевой силы (т.е. положения базовой линии в состоянии покоя), по сути, в реальном времени, и предоставления системе возможности заставить зонд взаимодействовать с образцом гораздо быстрее системы, изображенной на Фиг. 2C. На самом деле, получая среднее значение хотя бы одного цикла резонансной частоты кантилевера после прямого вызова, можно реализовать устойчивую оценку нулевой точки (базовой линии). В результате частотная модуляция может быть значительно усилена без ухудшения стабильности системы. Более того, появившееся преимущество более быстрой работы, конечно же, снижает эффект шума в системе.
Для измерения с очень чувствительным определением силы обычно используются мягкие кантилеверы (постоянная пружины от 0,01 Н/м до 0,3 Н/м). Эти рычаги имеют меньшую резонансную частоту и очень длительное время прямого вызова. Более того, колебание, вызванное сцеплением (потеря контакта), гораздо сильнее, как показано на Фиг. 6C. На Фиг. 6C характеристика отклонения мягкого кантилевера схематически изображена как функция времени. Траектория зонда также изображена схематически как определение положения (Фиг. 6B). Как видно, паразитное колебание сильно перевешивает силу взаимодействия, делая управление практически невозможным. До настоящего изобретения пользователю пришлось бы ждать остановки колебания довольно долго, так что Fr_i становится единственным максимальным значением для получения стабильного управления обратной связью. По мере того как кантилевер становится более чувствительным, ожидание прямого вызова становится недопустимо долгим. Предпочтительные варианты осуществления настоящего изобретения определяют базовую линию путем разделения зоны взаимодействия и зоны отсутствия взаимодействия посредством синхронного выравнивания по ближайшему положению между зондом и образцом. Участок, соответствующий «зоне взаимодействия», замкнут посредством синхронного маркера, с контрольным сигналом запуска в начале каждого цикла. Любая точка отклонения в данном участке может использоваться как параметр обратной связи для контроля стабильного взаимодействия. Все данные об отклонении вне зоны взаимодействия усреднены до константы и используются как базовая линия для расчета ΔFr на Фиг. 3. Комбинируя определение базовой линии и синхронное управление, относительная сила 5F может мгновенно и точно определяться и контролироваться. Такой контроль позволяет Fr_i быть гораздо ниже паразитного отклонения, как изображено на Фиг. 6C.
Стабильное состояние при этом обозначает постоянную максимальную силу или постоянную минимальную силу, или сочетание характеристик формы кривой силы взаимодействия в каждом цикле относительного движения зонда/образца.
Другим значительным преимуществом настоящих методов является способность определять базовую линию с данными по колебаниям большой амплитуды. Поскольку резонансная частота кантилевера известна, в альтернативном варианте среднее значение может быть определено в зоне отсутствия взаимодействия путем анализа целого кратного циклов резонансной частоты кантилевера. Усреднение кратного цикла может эффективно убрать данные колебательного отклонения, обеспечивая постоянную базовую линию.
Примечательно, что резонансная частота кантилевера также может определяться с помощью известных методов, таких как развертка по частоте и термическая подстройка.
Далее, возвращаясь к Фиг. 7, 8A и 8B, видим, что предпочтительные варианты также используют то, что здесь называется как «стробирование средней силы отталкивания». На Фиг. 7 схематически показано отклонение зонда, включая серию периодов взаимодействия, после работы АСМ. Предыдущие методы управления, использующие силу как параметр управления, усредняют общую силу всего взаимодействия между острием и образцом, обеспечивая среднеквадратичное значение для сравнения с заданной точкой силы. В уровне техники считается, что силы, отображаемые кривой силы, являются комплексными. И сила отталкивания, и сила притягивания действуют на острие зонда во время цикла, как указано выше. При включении, например, части силы притяжения (C-D на Фиг. 2C), имеющей тенденцию отмены силы отталкивания, чувствительность силы и разрешение изображения чаще всего ухудшаются.
Возвращаясь к Фиг. 8A и 8B, следует указать на иллюстрацию стробирования средней силы отталкивания. В этом варианте сигнал синхронизации системы, такой как сигнал, показанный на Фиг. 8B, используется для «стробирования» части силы отталкивания (B-C на Фиг. 2C) кривой силы (изображенной затемненной частью «A» кривой отклонения) путем исключения части силы притяжения кривой силы. При управлении отделением острия зонда от образца, исходя из части силы отталкивания кривой силы, чувствительность силы и разрешение изображения повышаются благодаря снижению негативного воздействия части силы притяжения кривой (т.е. притягивающие силы взаимодействия являются силами дальнего взаимодействия, и поэтому воспринимают взаимодействие на больших площадях, обеспечивая худшее разрешение). Более того, стробирование действует для устранения шума при осуществлении стробированного усреднения. При этом время отправки сигнала синхронизации настроено таким образом, что используется только участок силы отталкивания. Такая работа обеспечивается использованием стробирования в предварительно синхронизированном положении, как показано и описано в части Фиг. 3.
С учетом упомянутого, в соответствии с Фиг. 9A и 9B, синхронное усреднение может также быть задействовано в дальнейшем для большего совершенствования соотношения сигнала к шуму, чтобы таким образом окончательно обеспечить управление приблизительно на нулевой точке силы. Фиг. 9A, подобный другим изображениям отклонений острия и образца, показывает несколько циклов отклонения зонда, когда острие взаимодействует с образцом. Как отмечалось ранее, сигнал шума присутствует всегда при выполнении этих видов измерений СЗМ/АСМ. При комбинировании сигнала отклонения с соответствующим сигналом синхронизации, подобного тому, который показан на Фиг. 9B, выполняется синхронное усреднение отклонения. В результате эффект шума значительно снижается в соответствии с

где Di представляет данные в цикле i. Усредненный сигнал с сигналом для соотношения шума, улучшенным с помощью коэффициента VN, снижающего минимальную контролируемую силу (можно использовать ширину полосы синхронизации), показан на Фиг. 9C.
Далее, возвращаясь к Фиг. 10, отметим, что АСМ 100, работающий в Режиме PFT, включает в себя зонд 102, смонтированный в держателе 108 зонда и имеющий кантилевер 104, поддерживающий острие 106. В этом случае отделение острия и образца моделируется приводным устройством 112 (например, пьезоэлектрической лампой XYZ), подсоединенным к держателю 108 зонда с его помощью). Однако следует учитывать, что предпочтительные варианты осуществления изобретения применимы к тем измерительным приборам АСМ, которые модулируют отделение острия от образца с помощью перемещения образца в Z.
При работе отклонение зонда измеряется отражением светового луча «L» от тыльной части зонда и в направлении детектора 114, такого как четырехквадрантный фотодетектор. Сигнал отклонения затем передается на аналогово-цифровой преобразователь 103. Оцифрованный сигнал используется для поддержания низкого уровня силы острия и образца, при эксплуатации АСМ на высокой скорости.
В варианте, показанном на Фиг. 10, отклонение зонда без взаимодействия острия и образца передается фоновому генератору 105. Фоновый генератор создает периодическую форму волны, соответствующую фоновому сигналу, когда острие и образец не взаимодействуют. Такая форма волны может быть сгенерирована ПЦС (функциональный генератор Прямого цифрового синтеза), амплитуда и фаза которого определяются зафиксированным усилителем, и входом которого является фоновый сигнал. Такая форма волны также может быть сгенерирована, синхронно усредняя множественные циклы фона с помощью сигнала синхронизации. В схеме 120 сравнения общее отклонение сигнала обрабатывается путем вычитания фонового сигнала, чтобы генерировать сигнал, представляющий силу взаимодействия между острием зонда и образцом, не зависящую от паразитного фона (Фиг. 4C и 5C). (Обратите внимание на то, что, несмотря на возможность описания аналоговой и цифровой схемы, понятно, что работы могут проводиться в любой традиционной аналоговой или цифровой схеме, хотя предпочтительный вариант использует архитектуру программируемой логической интегральной схемы (ПЛИС) для реализации измерения). Этот сигнал затем пропускается через цифровой фильтр 122, который обрабатывает ошибку отклонения после вычитания для ограничения колебания рычага обработанного прямого вызова до числа избранных циклов. Отфильтрованный сигнал передается на синхронную усредняющую цепь 123 для дальнейшего повышения соотношения сигнал-шум. При усреднении данных в участке отсутствия взаимосвязи с помощью синхронизации базовая линия определяется из цепи 124 усреднения базовой линии. Цепь 125 сравнения обрабатывает общий сигнал отклонения с помощью вычитания базового сигнала для генерации сигнала, представляющего силу взаимодействия острия зонда с образцом при отсутствии DC-дрейфа кантилевера. Этот сигнал в дальнейшем передается на детектор 126 силы.
Калькулятор 135 Интервала Синхронизации определяет фазовый сдвиг между отклонением и Z-модуляцией ПЦС (Блок 127), который обеспечивает управление приводом и синхронизацией в виде временной задержки. Генератор 129 пиковой силы или положения импульса силы отталкивания генерирует синхронизирующий сигнал детектора 126 силы, с помощью маркера синхронизации и интервала синхронизации. Детектор 126 силы анализирует выход суммирующей цепи 125 с помощью идентификации пиковой силы отталкивания либо усредненной силы отталкивания в рамках контролируемого региона, изображенного на Фиг. 8A. Кроме того, при эксплуатации детектора 126 силы таким образом, чтобы контроль силы мог быть запущен в выбранной части кривой силы (например, участке силы отталкивания), достигается более высокая чувствительность с помощью снижения эффекта силы притяжения между образцом и зондом. Более того, отношение сигнал-шум улучшается путем исключения шума из управляющего импульса детектора 126. Селектированная сила отталкивания затем сравнивается с соответствующим заданным значением (Блок 128), и сигнал об ошибке генерируется и передается на блок управления (например, ПИ контроллер 130). Затем контрольный сигнал преобразуется в аналоговый (преобразователь 132) и передается в суммирующую цепь 134 для комбинирования с сигналом синхронизации из Блока 127, после того как сигнал синхронизации будет преобразован в аналоговый с помощью преобразователя 136. Затем выход суммирующей цепи 134 применяется к пьезоэлектрическому Z-приводу 112 для активирования z-положения (в данном случае - зонда) для поддержания, по сути, стабильного взаимодействия между острием зонда и образцом. Соответствующий способ работы подробнее описывается ниже в части Фиг. 13.
Возвращаясь к Фиг. 11, отметим показанный способ 300 эксплуатации АСМ в соответствии с режимом PFT. После установки и инициализации Блока 302 (настройка не требуется) зонд приводится в состояние колебания и входит в контакт с образцом. Желательно, чтобы было инициировано относительное движения XY между зондом и образцом в Блоке 304 (сканирование).
Затем определяется движение зонда; в частности, отклонение зонда определяется и передается на конвертер для дальнейшей обработки. Затем, в Блоке 306, этот способ используется для восстановления взаимодействия между зондом и образцом, как описано выше, с опциональным выполнением гидродинамического фонового вычитания с помощью фиксированного усиления, либо, что еще более предпочтительно, синхронного усреднения отклонения. После фильтрации выходного сигнала в Блоке 308 (например, выбор количества циклов прямых вызовов для обработки), с помощью метода определяется сила в Блоке 310 (определение пиковой силы/стробированное усреднение), опционально исходя из участка отталкивания на кривой силы. Затем, в Блоке 312, сила сравнивается с заданной точкой силы, заданной в соответствии с желаемой пользователем силой взаимодействия. Z-приводной механизм отвечает на сигналы управления в Блоке 316 для регулировки отдаления острия зонда от образца и поддержания силы заданного значения при использовании сигналов управления для формирования изображения образца.
Возвращаясь к Фиг. 12A-12C, укажем на иллюстрацию возможности предпочтительных вариантов обеспечивать мгновенную обратную связь силы. На Фиг. 12A показаны несколько схематических кривых силы по отношению ко времени с разными пиковыми силами отталкивания. Примечательно, что взаимодействия факторов Q и S превышают пороговую силу, определенную заданным значением, тогда как взаимодействие R иллюстрирует пиковую силу отталкивания ниже заданного значения. Ошибка обратной связи изображена на Фиг. 12B для систем обратной связи сил предыдущего уровня техники. В частности, поскольку сила отталкивания превосходит заданное значение, задержка «d» указывается до отображения пиковой силы отталкивания на «Х» для первого взаимодействия. Это аналогично для взаимодействия маркированного «S», где ошибка обратной связи не устанавливается до тех пор, пока существенно не превысит точку, при которой сила отталкивания начинает превышать заданное значение.
И наоборот, как показано на Фиг. 12C, отклик на любую силу, превышающую заданное значение, определяется практически мгновенно, при условии меньшей задержки обратной связи в силу характеристик Режима PFT, рассмотренного выше, включая паразитное фоновое вычитание, базовое усреднение и стробированное среднее, управление силой отталкивания, опционально - в сочетании с синхронным усреднением. Имея возможность быстрой идентификации сил, превышающих заданное значение, силы, соответствующие взаимодействию зонда и образца, можно свести к минимуму, таким образом обеспечивая значительное преимущество в смысле работы АСМ на высокой скорости и с высоким разрешением. И это особенно справедливо для неровных образцов, в которых изменения поверхности могут ограничить время отклика и/или разрешения.
АЛГОРИТМЫ
Для обеспечения точности вычитания фона были разработаны две схемы, как показано на Фиг. 13 и на Фиг. 14.
На Фиг. 13 показан алгоритм 400 для вычитания фона отклонения кантилевера (паразитное воздействие на отклонение). Блоки 402 и 404 обеспечивают, что зонд находится достаточно далеко (30 нм, например) от образца, так что воздействия импульса отталкивания от поверхности нет, в соответствии с выбором пользователя при настройке. Блок 406 содержит несколько подэтапов. Система АСМ отбирает данные отклонения кантилевера для нескольких циклов и производит цифровое кодирование данных во множественные сегменты с периодом «Т» для каждого сегмента. Метод АСМ выравнивает каждый сегмент данных по началу периода «Т» и затем усредняет данные. Далее по способу 400 усредненные сегментные данные используются как фон для периода «Т». В Блоке 408 осуществляется вычитание фона от Блока 406 из измеряемых данных в каждом периоде «Т» с помощью, например, процессора ПЛИС. Блок 408 использует фоновые исправленные данные для обратной связи.
На Фиг. 14 показан еще один алгоритм 500 для вычитания фонового отклонения. Блоки 502 и 504, рассчитывающие высоту подъема и поднимающие острие зонда при неактивной обратной связи z, используются для исключения взаимодействия острия зонда с образцом. В Блоке 506 используется синхронный усилитель с приводным сигналом, перемещающим зонд кантилевера, в качестве опорного уровня, а данные отклонения кантилевера - как синхронный ввод. В Блоке 508 данные амплитуды и фазы, полученные из блокировки состояния синхронизации, используются для генерации синусоидального сигнала, а этот сигнал настроен и используется для вычитания данных отклонения до тех пор, пока отклонение не станет постоянным (в пределах шума). Вычитание в реальном времени выполняется в Блоке 510. При достижении достаточного вычитания (определяется с помощью постоянного отклонения, когда острие зонда не взаимодействует с поверхностью), АСМ в состоянии использовать фоновые исправленные данные для обратной связи в Блок 512.
Обратная связь, рассчитанная в соответствии с Фиг. 13 и 14, значительно колеблется, по мере того как зонд приближается к поверхности образца. Такое колебание вызвано гидродинамической силой как функцией дистанции от зонда до поверхности образца. Это колебание также может служить показателем близости зонда к образцу перед тем, как он фактически начнет взаимодействие с образцом. Зная об этом, моторизированный вход в контакт можно осуществлять на высокой скорости, до тех пор пока не будет достигнуто заранее определенное значение фона; затем можно выполнять более медленные шаги установления контакта.
Фоновые вычитания также предпочтительно выполнять при установлении контакта зонда с поверхностью образца, как показано на Фиг. 15 и 16.
Разница между этими двумя методами вхождения в контакт заключается в том, что в «нормальном» контакте 600 на Фиг. 15 используется пошаговый двигатель только для перемещения зонда в направлении образца, для определения поверхности образца. Однако на Фиг. 16 показан «шьющий» контакт, который перемещает зонд с пьезоэлектрического привода Z при каждом шаге двигателя, когда способом 700 ищется поверхность образца. Исходно придерживаясь Фиг. 15, сначала по методу 600 делается пошаговое переключение двигателя, чтобы снизить отдаление между острием и образцом фиксированными шагами, например, по 0,1 нм - примерно до 3 микрон в Блоке 602. При включенном управлении обратной связью (определение силы в соответствии с данным методом) цепь обратной связи управляет приводным устройством для перемещения острия, в данном случае - в направлении образца в Блоке 604. В Блоке 606 алгоритм определяет, была ли обнаружена поверхность (т.е. было ли достигнуто заданное пороговое значение силы). Если нет, то операция фонового вычитания, описанная выше в части Фиг. 5, выполняется до дальнейшего пошагового переключения двигателя в блоке 602. Если да, то обратная связь отключается, и высота подъема определяется с помощью вычисления z-перемещений между пиковой силой и максимальным негативным положением силы сцепления, плюс определенный запас (например, 10 нм), и острие может быть поднято в Блоке 610 (например, чтобы минимизировать вероятность столкновения). Затем в Блоке 612 выполняется фоновая операция вычитания, а управление обратной связью снова инициируется в Блоке 614 в соответствии с действующим методом.
На Фиг. 16 Блоки 708, 712, 714 и 716 прямо соответствуют Блокам 606, 610, 612 и 614 алгоритма 600 на Фиг. 15. Однако до определения поверхности «шьющий» контакт, подобный известному в уровне техники, используется для подъема острия в Блоке 702 перед пошаговым переключением двигателя вниз в Блоке 704; в данном случае подъем составляет 1,5 шага двигателя. Высота подъема может выбираться пользователем на основе типа образца и т.д. Затем обратная связь включается в Блоке 706 для определения силы в соответствии с действующим методом. Если поверхность не определена, алгоритм 700 выполняет фоновое вычитание в Блоке 710 (аналогично Блоку 608) до выполнения следующего подъема в Блоке 702. Как только поверхность обнаружена, СЗМ может формировать изображение образца в Блоке 716.
На Фиг. 17 отражается практическая ситуация взаимодействия между зондом и образцом и предлагается дополнительное рассмотрение вышеуказанного вопроса в части Фиг. 6. Реальное взаимодействие между зондом и образцом происходит только в пределах маркера Интервала синхронизации. В участке отсутствия взаимодействия происходит остаточное самоколебание кантилевера из-за прекращения действия силы сцепления (также известной как прямой вызов). Такое колебание вызывает изменения базового значения, создавая такие же изменения в δFr, изображенной на Фиг. 3. Такое изменение образует шум контроллера. Для того чтобы минимизировать изменения базового значения, данные, помеченные как «базовый средний» участок, усреднены до единой константы, представленной пунктирной линией. Эти постоянные данные используются как базовые значения при расчете δFr в каждом цикле обратной связи. Участок для «базового среднего» может варьировать в зависимости от качества данных. Он должен быть меньше, чем Интервал Синхронизации, чтобы избежать усреднения реального взаимодействия между зондом и образцом, происходящего в Интервале Синхронизации.
Сила мгновенного взаимодействия может определяться при использовании силы δFr, рассчитанной с помощью Уравнения (1), в котором Fr_i. может быть текущим значением в Интервале Синхронизации. Как отображено на Фиг. 18, это также может быть значение, полученное с помощью стробированного усредненного значения (см. также Фиг. 7 и 8A/8B). Схема стробированного среднего значения использует значения отклонения во временной зоне δt и усредняет все значения данных в данной временной зоне. При этом можно значительно улучшить отношение сигнала к шуму. Fr_i. служит заданным значением при управлении обратной связью. Она колеблется, приводя к значениям от негативного δFr до высокопозитивного δFr. Высокопозитивное число для δFr обозначает более сильное взаимодействие отталкивания с образцом.
На Фиг. 19 показана методика 800 мгновенного управления силой, используемая для формирования изображения с помощью полуконтактного сканирования пиковой силы (PFT). В Блоке 802 приводной механизм осуществляет колебания зонда или образца, выполняя относительное движение с амплитудой в диапазоне от 0,1 нм до 3 мкм, от пика до пика. В этой точке зонд находится относительно далеко от образца, а базовое значение и фон могут определяться в Блоках 804 и 806. Как только фон определился, он тоже вычитается из обнаруженного отклонения в Блоке 806 для обеспечения минимальной находимой силы. Блок 808 работает для взаимодействия зонда с образцом при контакте, как указано на Фиг. 15 и 16. Как только образец начал взаимодействовать с зондом, данные об отклонениях в периоде «Т» собираются и оцифровываются для анализа Интервалов синхронизации (Фиг. 18), мгновенной силы Fr_i и относительной силы δFr в Блоке 810. Базовое значение и фон могут пройти повторную проверку в соответствии с Фиг. 14 в данном Блоке.
Затем обратная связь используется для поддержания δFr и Fr_i на уровне предустановленного значения в Блоке 812. Сканер XY, Блок 814, также задействован для изменения положения зонда относительно образца и впоследствии - для формирования топографического изображения, а также одного или более механических изображений, указывающих, например, на эластичность, сцепление и рассеяние энергии.
На Фиг. 20 размеченная кривая времени измерения на Фиг. 20A преобразована в реальные пространственные данные Фиг. 20B. В частности, Фиг. 20A представляет собой схематический план силы взаимодействия как функцию времени в одном периоде модуляции. Фиг. 20B представляет собой силу взаимодействия как функцию дистанции между зондом и образцом за один период модуляции. Эластичность материала может традиционно рассчитываться с использованием верхней части наклона кривой (см. сегмент DE на Фиг. 20B, сегменты CDE отображают кратковременное взаимодействие отталкивания) с помощью, например, модели Оливера-Фарра или другой контактной механической модели (см., например, У.Л. Оливер и Г.М. Фарр, 2004. Измерение модуля жесткости и упругости с помощью измерительного индентирования: Продвижение в понимании и уточнения к методологии. Журн. по материаловед. 193-20-2004 г.). Сила притяжения Ван-дер-Ваальса может определяться по кривой приближения (сегмент BCin, Фиг. 20A и 20B), тогда как капиллярное сцепление, происходящее при отдалении зонда от образца, также можно рассчитать (см., например, Теоретическое исследование зависимости расстояния капиллярных и ван-дер-ваальсовых сил в сканирующей силовой микроскопии, Стифтер и др., Физический обзор В, Т.62, №20, 11/15/2000). При перемещении зонда на плоскости xy и при повторе этих измерений свойства образца, такие как упругость, адгезия Ван-дер-Ваальса, капиллярная адгезия (сегмент EF соответствует притяжению и капиллярным силам), могут отображаться для целой поверхности образца или какой-нибудь ее части. Более того, можно отобразить твердость образца по разнице кривой приближения и кривой восстановления (отдаления).
Фиг. 20B представляет два типа данных, а именно прямые данные измерения и выводимые данные. Прямые данные измерений являются параметрами, такими как силы взаимодействия, определяемыми мгновенно в рамках каждого цикла. Выводимые данные - это данные, полученные при расчете в рамках каждого цикла взаимодействия с любой частью кривой. Такие данные могут включать деформацию, которая рассчитывается по глубине проникновения от точки С до точки D на Фиг. 20B. Еще один пример - это рассеяние энергии, определяемое зоной, заключенной в кривую приближения (BCD), и зоной отвода (EFG). Еще одним примером служит сила сцепления, рассчитываемая по разнице между В и F на Фиг. 20B. Любые из выводимых данных могут использоваться как параметры управления обратной связью. Например, когда деформация выбирается как параметр обратной связи, цепь управления на Фиг. 1 создает изображение на основе постоянной деформации, вместо постоянной пиковой силы. Любые выведенные данные могут служить той же цели в цепи обратной связи.
Важный способ использования формирования изображения, управляемого мгновенной силой, заключается в глубоком щелевом измерении. Когда полуконтактный режим (TappingMode™) ACM используется для визуализации глубоких щелей (соотношение сторон около 3:1 или более, с наиболее трудными для визуализации щелями, имеющими ширину менее 100 нм, обычно 10-100 нм), большая сила притяжения боковых стенок может привести к изменению амплитуды, результатом которой будет неправильное измерение глубины щелей. При использовании прямой силы отталкивания в качестве обратной связи такая обратная связь реагирует только на z-изменение, когда зонд находится в контакте с образцом. В итоге обратная связь, управляемая силой, может измерять глубину щелей более надежно, чем полуконтактный режим TappingMode™ ACM. Фиг. 21A и 21B представляют демонстрацию этого измерения. При измерении используется такой же зонд и образец, при таком же расположении образца. Цепь обратной связи, управляемая мгновенной силой, предоставляла реальное измерение глубины щелей при достижении зондом дна щели (Фиг. 21B). Режим TappingMode™ ACM, с другой стороны, перемещал зонд преждевременно, обеспечивая измерение на гораздо меньшей глубине, и дно щели нигде не было измерено (Фиг. 21A).
Наконец, возвращаясь к Фиг. 22A/22B и 23A/23B, просмотрим описываемые дополнительные черты настоящего изобретения. На Фиг. 22A и 22B АСМ используется для модулирования Z при достаточной амплитуде (например, суб-нанометр), чтобы обеспечить постоянное взаимодействие между зондом в зоне силы отталкивания (Режим силы отталкивания малой амплитуды), т.е. в нескольких нанометрах от поверхности. Это достигается при использовании либо разницы силы от пика до пика (Fa-Fb, в соответствии с Z-модуляцией от пика до пика), либо амплитудного выхода синхронного усилителя, в качестве обратной связи. Параметр обратной связи пропорционален градиенту силы отталкивания, если амплитуда довольно мала, - в этом случае градиент силы является линейным. Такая обратная связь является чувствительной только к силам коротких химических связей, силам, соответствующим атомным разрешениям. Следовательно, представляемый метод является идеальным для формирования изображений высокого разрешения.
На Фиг. 23A и 23B показано линейное расположение изображений с Фиг. 22A/22B, но задействован участок силы притяжения кривой силы (режим силы притяжения малой амплитуды). В этом случае система модулирует Z при амплитуде, которая является достаточно малой для того, чтобы обеспечить постоянное взаимодействие между зондом и образцом в зоне силы притяжения. При этом простая разница силы от пика до пика (Fa-Fb) либо выход амплитуды синхронизированного усилителя может использоваться в качестве обратной связи, при условии что параметр обратной связи пропорционален градиенту силы притяжения, если амплитуда является достаточно низкой, для того чтобы градиент силы был линейным. Этот метод является наименее деструктивным для образца, поскольку зонд не контактирует с образцом. По сравнению с Режимом силы отталкивания малой амплитуды полярность обратной связи является обратной.
ПРЕИМУЩЕСТВА РЕЖИМА PFT
В целом преимущества Режима PFT при выполнении АСМ являются многочисленными. С учетом присущего ему стабильного продолжительного управления силой, формирование изображения образца без дрейфа может быть выполнено вместе с одновременным проведением измерений механических свойств высоты, жесткости, сцепления, гибкости и упругости на скоростях полуконтактного режима (TappingMode™). Поскольку метод не подвержен воздействию DC-дрейфа (режим PFT создает свои собственные контрольные значения каждые несколько сотен микросекунд), стабильная работа не подвергается риску даже без опытного оператора. Это позволяет использовать СЗМ часами и даже днями (большие образцы - больше времени) без существенного риска для целостности изображения. Особенно это полезно для производственных измерений, таких как измерение роста кристаллов и мониторинг изменения фазы полимеров, которые могут занять несколько минут или часов. Примечательно, что при полуконтактном сканировании пиковой силы изображение может быть сформировано в рабочей полосе пропускания более 2 кГц. Полоса пропускания при полуконтактном сканировании составляет более 1 кГц, в первую очередь потому, что скорость управления динамикой кантилевера, например, требует несколько миллисекунд для стабилизации с целью возврата в резонансную частоту (чем больше ошибка амплитуды, тем медленнее). Раскрытые варианты также могут устранить проблемы с интерпретацией фаз, потому что это независимо измеряет эластичность, сцепление, рассеяние энергии и т.д. Все эти факторы влияют на фазу колебания кантилевера.
Более того, Режим PFT нечувствителен к динамике кантилевера, поскольку существует необходимость в ожидании полного прямого вызова кантилевера, как только зонд снят с образца. Это дает высокую скорость формирования изображения в вакууме, а также позволяет сделать случайный выбор среди опций кантилевера. Эта разница позволяет отображать несколько порядков величины силы взаимодействия, тогда как разрешение силы отталкивания может применяться для клеточной визуализации без артефактов.
Тот факт, что режим PFT не должен работать на резонансной частоте зонда, предлагает значительные преимущества при визуализации в жидкости. Из-за различных паразитных сил связи в жидкости настройка кантилевера представляет собой ключевой вопрос при визуализации жидкости. Режим PFT полностью устраняет необходимость настройки кантилевера (усреднения базового значения, фоновое вычитание и т.д.). Кроме того, диапазон регулирования силы и возможность использовать кантилевер, имеющий гораздо более широкий диапазон жесткости пружины (как правило, более 0,3 Н/м только для полуконтактного режима АСМ, в то время как режим PFT может использовать кантилевер, имеющий жесткости пружины всего 0,01 Н/м), обеспечивает для управления формированием изображения гораздо больше простора при визуализации биологических образцов.
Опять же это связано с тем, что режим PFT не зависит от энергии колебаний, накапливающейся в кантилевере для преодоления сил капиллярной адгезии. Поскольку метод использует внешний элемент активации (цепи обратной связи, предпочтительно запуск при пиковом усилии), механизм, способный преодолеть капиллярные силы, является гораздо более мощным, чем в полуконтактном режиме, в котором сама статическая упругая энергия кантилевера (питаемая за счет кинетической энергии колеблющегося зонда) оттягивает зонд от образца при преодолении капиллярных сил. В результате нет практически никаких ограничений по константе пружины кантилевера для стабильной работы в присутствии капиллярного слоя. Поэтому режим PFT обеспечит стабильное полуконтактное управление работы с помощью кантилевера, имеющего константу пружины по крайней мере 0,01 Н/м.
Еще одним преимуществом полуконтактного управления является способность использовать кантилеверы от 0,01 Н/м до 1000 Н/м в одном режиме работы АСМ. Это позволяет выполнять отображение свойств с высоким разрешением для широчайшего спектра материалов на одном приборе, от 10 кПа до 100 ГПа в модуле упругости.
Кроме того, учитывая, по сути, обратную связь мгновенной силы, сбои острия практически исключены. Также, поскольку отклонение гидродинамически исправлено, настройка, как правило, не требуется, и поэтому практически любой пользователь может осуществить быструю подготовку.
По сравнению с существующими режимами работы АСМ быстрое формирование образа низкой силы, обеспечиваемое режимом PFT в сочетании с низкой средней прижимной силой и фактической ликвидацией боковых сил на зонде, обеспечит значительное продвижение в высокоскоростной визуализации для широкого набора образцов. Например, может быть измерена эластичность одной молекулы, а также узкие образцы ДНК в жидкости (например, ДНК 2 нм в ширину). Для сравнения, при визуализации ДНК в жидкости полуконтактный режим АСМ имеет разрешение по крайней мере на 2 нм ниже. Кроме того, измерение жесткости ДНК в жидкости затруднено в полуконтактном режиме АСМ, потому что нет возможности количественной оценки свойств, то есть он может обеспечить измерение только относительных механических свойств (например, анализируя контраст в фазовых изображениях). В соответствии с настоящим методом, можно выполнить измерения свойств на молекулярном уровне.
В итоге в Режиме PFT можно получить данные столь же хорошие или лучше (разрешение (например, менее 100 нм, и, что еще предпочтительнее, меньше чем приблизительно 1 нм сбоку) и т.д.), чем данные, получаемые в полуконтактном режиме АСМ без повреждения зонда и/или образца. Метод гарантирует значительное повышение скорости по сравнению с другими известными методами обратной связи силы, и это делается без использования малого рычага. Фактически можно использовать довольно большой рычаг (>60 мкм в длину) при субрезонансе в режиме PFT, для того чтобы отклик рычага в диапазоне частот был значительно лучше, чем отклик, достигнутый при использовании так называемого малого кантилевера (>10 кГц).
Конечно, дополнительным преимуществом настоящих предпочтительных вариантов является то, что кривая силы генерируется каждым пикселем, так что изображение предоставляет информацию, выходящую за пределы стандартной информации образа АСМ в полуконтактном режиме. Из каждого пикселя пользователь может получить количественную информацию по жесткости, сцеплению, эластичности, гибкости и др. Опять же, поскольку базовое отделение зонда от образца повторно сбрасывается на ноль для каждого пикселя, дрейф сведен к минимуму, чтобы обеспечивает значительное совершенствование производительности и надежности визуализации.
Анализ показывает, что настоящий режим PFT дает очень слабую визуализацию силы для обеспечения очень высокого разрешения с помощью отображения свойств в реальном времени (т.е. мгновенный контроль силы). Контроль силы, по сути, является стабильным (практически не имеет дрейфа) в течение достаточно продолжительного периода для визуализации образца с минимальным вмешательством пользователя или без него. Система позволяет осуществлять более быструю и легкую установку, потому что подстройка не требуется (усреднение базового значения и гидродинамическая фоновая коррекция). Более того, более точное управление силой в принципе исключает неполадки зонда, тогда как метод/система также принципиально исключает боковую силу на поверхности образца. Система также является нечувствительной к динамике кантилевера в связи с отсутствием необходимости ждать прямого вызова зонда перед установлением связи зонда с образцом, как только он убирается с образца. Также, как уже обсуждалось, пользователю доступен широкий набор кантилеверов для получения одновременных измерений высоты, жесткости, сцепления, эластичности и гибкости на скоростях АСМ в полуконтактном режиме (>2 кГц). Настоящая СЗМ может визуализировать образцы, такие как ДНК 2 нм в ширину в жидкости с данными характеристиками, а также выполнять усовершенствованные измерения механических свойств, таких как эластичность отдельной молекулы.
РЕЖИМ PFT, ПРОСТОТА В ИСПОЛЬЗОВАНИИ
В предпочтительных вариантах осуществления настоящего изобретения применяется режим PFT (PFT Mode), значительно упрощающий эксплуатацию атомно-силового микроскопа как для новичков, так и для опытных пользователей. В отличие от атомно-силовых микроскопов с полуконтактным режимом, которые работают за счет контроля взаимодействий между острием и образцом, основанных на отклонениях от, например, заданного значения амплитуды или фазы колебания зонда, т.к. острие взаимодействует с образцом (что представляет собой комплексные отношения, связанные с силами острия-образца), режим PFT контролирует взаимодействия острия-образца, основанные на силах взаимодействия острия-образца в каждой точке по ходу цикла модуляции зонда в режиме колебания. Этот непосредственный контроль силы взаимодействия упрощает контроль в целом и позволяет предпочитаемым вариантам конструкции сводить к минимуму воздействия усложняющих переменных, включая колебательные гармоники и колебания системы и, таким образом, поддерживает стабильность.
На Фиг. 24A показан схематический график 1000 профиля образца (высота) 1002, включающий участки 1004 возвышения и участки 1006 понижения. На этот профиль 1002 наложен сигнал прослеживания или изображение 1008, полученное атомно-силовым микроскопом. Поскольку сканирование продолжается в указанном направлении, поддерживается стабильная обратная связь.
Стабильная обратная связь посылается в контур обратной связи, который не проявляет тенденцию к самовозбуждению, т.е. генерированию выходных колебаний независимо от входных. В точке «X», тем не менее, обратная связь становится нестабильной и изображение начинает подвергаться искажению от помех. Уменьшая усиление обратной связи, нестабильную обратную связь можно сделать более стабильной (при сокращенной стоимости и скорости визуализации и др.). На Фиг. 24B представлен ошибочный сигнал, соответствующий наложенному сигналу 1008 слежения. Важно то, что как сигнал высоты, так и ошибочный сигнал нестабильной обратной связи появляются с большими помехами, чем при стабильной обратной связи. Это явление будет использовано в аппарате автоматического программного изменения коэффициента усиления и нижеописанном методе данного изобретения.
На Фиг. 25 концептуально, с использованием графика амплитудно-частотного спектра высоты сигнала обратной связи или ошибочного сигнала, показано определение нестабильности обратной связи, используемое в предпочитаемых вариантах конструкции. Спектры сигнала показаны как для стабильной обратной связи 1010, так и для нестабильной 1012. Нестабильность обратной связи может быть количественно измерена на основании одного или более критериев. Эти критерии включают, например, амплитудный спектр при определенной частоте (f0). Частота f0 определяется при помощи системной идентификации или путем наблюдения спектра сигнала обратной связи, когда обратная связь нестабильна. Кроме того, нестабильность можно измерить количественно путем вычисления среднеквадратической погрешности или стандартного отклонения (см. Фиг. 27 и 28 и описание далее).
Вернемся к Фиг. 26A-26D, иллюстрации, на которой показаны силы острия-образца, когда острие теряет контакт с образцом (так называемый сброс). Как и на Фиг. 24A, на Фиг. 26A показана схема 1020, на которой изображен профиль образца 1022, а также прослеживание сигнала 1024 (высоты) атомно-силового микроскопа, наложенного на него. В этом случае на участке, отмеченном «А», острие теряет контакт с поверхностью образца во время сканирования изображения и сбрасывается, поскольку система контроля пытается вернуть острие на поверхность образца (обычно путем передвижения либо зонда, либо образца в точку Z). На Фиг. 26B показано, что на поверхностях с нисходящим уклоном (например, 1026 на Фиг. 26A) ошибочный сигнал (разница между измеренными силами взаимодействия острия-образца и заданными значениями) становится отрицательным, что побуждает систему контроля восстановить контакт острия и образца. На ровных участках (1032) погрешность равна нулю, так что острие проходит поверхность без поправок. На поверхностях с восходящим уклоном (1030) ошибочный сигнал положителен и система контроля использует эту информацию в попытке вернуть колебания к заданным значениям (обычно за счет увеличения отделения острия от образца). Однако на участке сброса «А» (соответствующем участку с нисходящим уклоном 1028 образца) ошибочный сигнал сначала показывает участок с нисходящим уклоном, но затем острие прекращает прослеживание поверхности, т.к. силы взаимодействия острия-образца равны нулю (см. Фиг. 26C).
На Фиг. 26D, где изображено увеличение по данным о силе взаимодействия острия-образца, показаны кривые сил, соответствующие участкам взаимодействия острия-образца (где потребовалась поправка на обратную связь), где силы характеризуются участком притяжения (захват контакта - силы Ван-дер-Ваальса), участком отталкивания, т.к. острие взаимодействует с поверхностью и продолжает цикл колебаний и участком залипания, где острие прилагает усилие к отходу от поверхности, и затем точкой, где оно высвобождается. Одним из преимуществ режима PFT перед, например, полуконтактным режимом является то, что каждая точка сил взаимодействия на кривой может быть использована контроллером для прослеживания поверхности (без ожидания сигнала вызова перед запуском другого цикла модуляции), как это было раньше. В случае сброса острия сброс можно выявить в предпочитаемых вариантах конструкций путем применения одного или более критериев: стандартное отклонение и/или амплитудный спектр на определенной частоте (или частотах) ошибочного сигнала обратной связи становится меньше пороговой величины; ошибочный сигнал обратной связи ниже пороговой величины; и/или максимальная сила/сила залипания или сила удвоенной амплитуды за период колебания меньше пороговой величины.
Атомно-силовой микроскоп 1100, работающий в режиме PFT и требующий меньших навыков работы в области атомно-силовой микроскопии, показан схематически на Фиг. 27. Атомно-силовой микроскоп (АСМ) 1100 включает зонд 1102, оснащенный кантилевером 1104, удерживающим острие 1106. Зонд 1102 установлен в зондодержателе 1108, который в этом случае соединен с пьезоэлектрическим приводом 1110, который может двигать острие 1106 зонда 1102 в направлении «Z» (ортогонально к поверхности образца). При взаимодействии зонда 1102 с образцом его отклонение контролируется схемой 1112 обнаружения отклонения, включая источник света 1114 (т.е. лазер), который направляет пучок света «L» к задней стороне рычага 1104. Рычаг 1104 отражает пучок света «L» к детектору 1116 (например, квадрантному фотодетектору), передающему сигнал, обозначающий отклонение, в аналогово-цифровой конвертер 1118. После преобразования аналогового сигнала отклонения в цифровой в блоке аналогово-цифрового конвертера 1118 окончательный сигнал передается в блок 1120 определения силы режима PFT. Окончательные сигналы силы (определяемые при помощи вышеописанной аппаратуры и методов для выявления сил взаимодействия острия-образца по точкам) передаются в цепь 1122 сравнения. Предпочтительно, чтобы максимальная сила сравнивалась с силой заданного значения, и ошибочный сигнал направлялся в контроллер 1124 пропорционально-интегрального типа. Контроллер 1124 пропорционально-интегрального типа подает контрольный сигнал, который передается в цифроаналоговый конвертер сканирования в направлении Z для применения пьезоэлектрического привода Z для контроля отделения острия-образца так, чтобы поддерживались заданные значения силы.
Для улучшения стабильности и, таким образом, сведения к минимуму необходимости задействовать опытного пользователя усиление автоматически подстраивается с использованием контрольной цепи 1123 усиления. Контрольный сигнал от контроллера 1124 пропорционально-интегрального типа, используемый для контроля пьезоэлектрического Z привода 1110, также передается в блок 1128, который выполняет повторную выборку данных о высоте в положении, соответствующем предпочтительно максимальной силе (см. блок 1120). Алгоритм ИЗО определения колебаний затем применяется для определения наличия колебаний высоты данных, т.е. имеется ли нарастание нестабильности. Если система находится на пороге колебаний и становится нестабильной, будут обнаружены высокочастотные помехи. Способ, которым алгоритм ИЗО определяет количество помех, подробнее описан ниже в соответствии с Фиг. 28. Алгоритм ИЗО определения колебаний выдает сигнал, определяющий величину нестабильности, - более краткий термин «помехи» применяется только в этом разделе. Такая нестабильность проявляет себя как помехи и вызывается контуром обратной связи. Но ее не следует путать с помехами в других частях системы, когда обратная связь не включена. Сигнал помех сравнивается с интервалом допуска на помехи в суммирующей цепи 1132. Интервал допуска на помехи является предопределенным параметром, связанным с продуктом, он не зависит от образца и его можно настроить. Если ошибочный сигнал, выходящий из цепи 1132, превышает предопределенный интервал, контроллер 1134 усиления определит соответствующий сигнал контроля усиления и отрегулирует усиление контроллера 1124, например, за счет сокращения интегрального (I) и пропорционального (Р) усиления малыми шагами (5% за каждый шаг, например), пока величина сигнала нестабильности, выведенного из 1130, не станет меньше, чем интервал допуска на помехи. В итоге в каждой точке построения изображения усиление может быть оптимизировано для обеспечения стабильности системы.
При работе контрольный сигнал сканирования в направлении Z, выходящий из цифрово-аналогового конвертера 1126 и оптимизированный контрольной цепью 1123 усиления, комбинируется с выходящим из цифрово-аналогового конвертера 1136 сигналом с поправкой на смещение Z (описано ниже), и приводом колебаний для режима PFT, оснащенным цифровым генератором прямого синтеза 1138 модуляции в направлении Z в суммирующей цепи 1139. При активном автоматическом программном изменении коэффициента усиления необходимость в опытном пользователе, который бы подстраивал усиление во время работы АСМ, отпадает.
Одним из критических элементов автоматического регулирования усиления обратной связи является возможность быстрого и точного определения нарастания нестабильности. Это определение часто осложняется неизвестной топографией, что может быть неверно интерпретировано как нестабильность, вызванная помехами в контроллере усиления. Вернемся к Фиг. 28; алгоритм 1140 применения блока ИЗО определения колебаний на Фиг. 27 подробно описан ниже. Данные о высоте используются для определения уровня нестабильности колебаний, т.к. высота калибруется любой из систем АСМ. Интервал допуска на помехи определяется как допускаемая величина помех, вызванных нестабильностью. Определяемый при помощи сигнала высоты, этот интервал обеспечивает абсолютную величину помех, допускаемых в системе обратной связи. Например, если интервал допуска на помехи равен 1 нм, любой сигнал нестабильности, выходящий из 1146 или 1148, считается приемлемым, если он находится в пределах этого интервала. Для образца высотой 100 нм (диапазон) такой интервал соответствует отношению сигнала к уровню помех 100 в изображении. Тем не менее для ровных образцов с волнистостью менее 1 нм интервал допуска на помехи будет больше, чем сигнал высоты образца. В этой ситуации интервал допуска на помехи следует сократить до 0,1 нм для получения качественного изображения (S(образец)/N(шум)=10). Этот интервал может самоподстраиваться на основании шероховатости образца. Данные о высоте, полученные при работе АСМ, отражают как топологию образца, так и колебания системы. В целом алгоритм 1140 работает для отфильтровывания топологии образца с целью определения достаточности величины помех для выявления нарастания нестабильности. При сканировании важно знать, что топология образца обычно не имеет больших различий в соседних пикселях. Путем вычисления разницы высоты между, например, тремя (3) соседними точками топология образца может существенно фильтроваться. Эти повторно отобранные данные о высоте (1131) схематически показаны на Фиг. 29. Хотя предпочтительно при анализе алгоритма используются три точки «q», «r» и «s», можно использовать больше точек.
В этой связи, если вернуться к Фиг. 28, сигнал контроля высоты, выходящий из контроллера 1124 пропорционально- интегрального типа (Фиг. 27), повторно отбирается (восстанавливается) в блоке 1142. Восстановление (повторный отбор) в этом контексте означает выборку данных о высоте в позициях, предпочтительно расположенных в точках максимальной силы, это должны быть, по меньшей мере три соседние точки на кривой. В блоке 1144 определена разница в высоте между отобранным количеством точек данных или пикселей. Например, если выбраны три точки, расчет выполняется следующим образом:

Абсолютная величина этой разницы |Н Diff(i)|, которая в идеале не отражает топологию образца (и не должна), получается в блоке 1146. Этот шаг используется как детектор колебаний. Затем, в блоке 1148, может быть определено скользящее среднее (значение). Определение скользящего среднего значения требуется только для тех образцов, которые демонстрируют значительные отличия в топологии, такие, что топология не может быть отфильтрована в данном образце, используемом для расчета разницы в высоте. Такие образцы включают, например, кремниевые решетки с резкими перепадами уровня поверхности. В таких случаях резкие перемены в топологии обычно продолжаются недолго. Следовательно, за счет определения скользящего среднего значения разницы в высоте, которое рассчитывается за относительно длинный период времени, такие зубцы отфильтровываются из анализа колебаний. Если говорить более конкретно, зубцы отфильтровываются путем сравнения их амплитуды с данными скользящего среднего значения. И из-за того, что проблематичные помехи колебаний обычно длятся гораздо дольше, чем изменяется топология, данные, связанные с амплитудой, подобны предыдущим данным скользящего среднего значения.
В продолжение рассмотрения способа 1140, в Блоке 1149, если абсолютное значение разницы, полученной в Блоке 1136, меньше некоторого кратного среднего скользящего, например, в четыре (4) раза среднего скользящего, рассчитанного в Блоке 1148, выходной сигнал алгоритма 1140 определения колебания будет |Н Diff(i)|. Если абсолютное значение разницы больше кратного, тогда выходной сигнал алгоритма 1140 будет средним скользящим. Среднеквадратическое значение этой величины затем определяется в Блоке 1150. Эта величина сравнивается с «интервалом допуска на помехи» в суммирующей цепи 1152, описанным выше в связи с Фиг. 27. Наконец, контрольный сигнал усиления обратной связи (уменьшение/увеличение усиления) определяется и передается в контроллер 1124 пропорционально-интегрального типа на основании ошибочного выходного сигнала цепи 1132 в Блоке 1154. Усиление увеличивается, если выходной сигнал 1130 ниже интервала допуска на помехи. Усиление уменьшается, если выходной сигнал 1130 выше интервала допуска на помехи.
Конкретное применение АСМ с использованием режима PFT показано на Фиг. 30. Преимуществом режима PFT для удобства пользователей прибора является применение автоматического контроля программного изменения коэффициента усиления (далее также именуется «автопилот» или «автопилотирование АСМ»), как описано выше. Пользователь запускает сканирование в Блоке 1500, затем определяет желаемое разрешение сканирования в Блоке 1502. Затем срабатывает последовательность запуска в Блоке 1504, заставляющая острие и образец контактировать. Система АСМ затем определяет, сработало ли «автопилотирование» в блоке 1506. Если нет, эта последовательность завершена (Блок 1530) и АСМ работает с использованием обратной связи, контролируемой оператором, без автоматического контроля усиления (некоторые опытные пользователи могут предпочесть следить за измерением и выполнять усиление и регулировку настроек вручную). Если автопилотирование включилось, в Блоке 1508 запускаются рабочие параметры с величинами по умолчанию, заданными на заводе-изготовителе, как цифровая обработка сигнала в Блоке 1510. В Блоке 1512 отображается, что автопилот функционирует и работает в режиме цифровой обработки сигнала.
Как только параметры запустились, разрешение сканирования устанавливается на малую величину в Блоке 1514. Сканирование с небольшим разрешением (например, 10 нм) выполняется при низком усилении для определения начального заданного значения максимальной силы и усиления для получения контрольного заданного значения. При построении любого изображения на АСМ сведение к минимуму сил взаимодействия острия-образца в целом приводит к увеличению срока службы острия и целостности образца. Система может определить минимальное заданное значение на основании знаний о базовых помехах в системе. Например, если помеха определения силы при взаимодействии острия с образцом равна 100 пН, может быть задано значение 300 пН, что позволит получить достаточное отношение сигнал/шум для контроля системы. В Блоке 1516 запуск верифицируется, а в Блоке 1518 система изменяет начальное усиление и заданное значение в попытке оптимизировать его. Оптимизация - пошаговый процесс, включающий:
1. Определение фоновых помех системы путем подъема острия так, чтобы не было взаимодействия;
2. Определение заданного значения, обычно в три раза больших, чем фоновые помехи максимальной силы, определенные в п. 1; и
3. Увеличение усиления (например, пошагово, предопределенными шагами), пока помехи на станут практически равными интервалу допуска на помехи.
Как только усиление и заданное значение будут определены при сканировании с низким разрешением в Блоке 1520, система восстановит разрешение сканирования, введенное пользователем, в Блоке 1522 и начнет работу АСМ для сбора данных об образце.
В Блоке 1524 система определяет, подстроил ли алгоритм усиление или заданное значение. Если ни усиление, ни заданное значение алгоритмом не настроились, восстановятся значения усиления/заданного значения по умолчанию в Блоке 1526. Затем система войдет в цепь наблюдения (Режим Наблюдения) в Блоке 1528. В режиме наблюдения определяется, превышает ли колебание пороговое значение. Если да, усиление может быть настроено (уменьшено). Если нет, усиление может быть увеличено для лучшего прослеживания. Режим наблюдения также работает для определения явления сброса. Если обнаружено явление сброса, как описано выше, заданное значение может быть увеличено для оптимальной работы. Увеличение заданного значения применяется предпочтительно в виде 5% прибавок за один раз (и опционально с проверкой шагов 1-3, описанных выше). Вышеизложенное действие продолжается, пока сканирование образца пользователя не начнет выполняться с должным разрешением.
В итоге вышеописанный контроль обратной связи дает возможность поддерживать в значительной степени идентичные максимальные взаимодействующие силы в каждом периоде модуляции зонда при взаимодействии колебаний острия и образца. Данный метод автоматически определяет настройки, связанные с максимальными взаимодействующими силами, на основании фоновых шумов и автоматически определяет усиление обратной связи согласно величине колебаний нестабильности. Таким образом, АСМ может быть использован новичком без выполнения системных настроек в процессе сбора данных.
Скорость сканирования также может быть автоматически настроена для оптимизации использования режима PFT. Обратимся к Фиг. 31, принципиальной схеме алгоритма 1600 контроля сканирования. В этом случае АСМ работает в режиме PFT в Блоке 1602, который включает непрерывное наблюдение за максимальными силами в каждом цикле взаимодействия острия-образца. В блоке 1604 методом 1600 определяется, превышает ли максимальная сила заданную величину порогового значения. Например, пороговое значение может соответствовать измеренному значению, превышающему 8 вольт. Если это так, сигнал настройки скорости сканирования передается в сканер для замедления сканирования до приемлемой скорости в Блоке 1608. Если нет, методом устанавливается, превышает ли изменение фона определенное пороговое значение (например, 0,25 вольт) в Блоке 1606. Если это так, скорость сканирования уменьшается в Блоке 1608. Если нет, текущая скорость сканирования поддерживается в Блоке 1610. Этот оптимальный контроль скорости сканирования может быть оптимизирован на каждом пикселе при работе в режиме PFT. В режиме PFT, таким образом, поддерживается идеальный баланс между получением высококачественного изображения и временем на получение этого изображения. Далее рассмотрим Блок 1606, например, ссылаясь на Фиг. 32A и 32B. На Фиг. 32A со всех сторон показан фон ровных участков в цикле взаимодействующих сил острия-образца. На Фиг. 32B фон подвергается изменениям в топографии образца - из-за ее особенностей острие может завязнуть в образце и отслеживание поверхности станет невозможным. В этом случае такие изменения фона определяются и используются для замедления сканирования.
Режим PFT также позволяет автоматически осуществлять контроль границы Z, что еще больше упрощает эксплуатацию данного АСМ. Параметр границы Z определяет динамический диапазон пьезоэлектрического привода Z. Предпочтительно, чтобы зонд центрировался согласно этому диапазону. Граница Z влияет на разрешение изображения в направлении Z и зависит от образца. Например, если образец ровный, тогда амплитуда помех сравнима с максимальным разрешением и разрешение, следовательно, должно быть уменьшено для сведения к минимуму возможности появления помех в получаемом изображении. Раньше это делалось вручную пользователем путем определения ровности образца. В режиме PFT контроль параметра границы Z выполняется автоматически. В этой связи обратимся к Фиг. 33. После того как методом 1700 инициируется запуск режима PFT в Блоке 1702 (граница Z установлена на «полный» (полный диапазон сканирования) без данных о шероховатости поверхности образца); методом 1700 захватывается один полный участок поверхности образца в рамке, соответствующий области сканирования, определенной пользователем в Блоке 1704. Среднеквадратическое значение высоты участка в рамке затем вычисляется в Блоке 1706. Если среднеквадратическое значение меньше порогового (например, 10 нм), как определено в Блоке 1708, то граница Z настраивается в Блоке 1710. Например, для ровного образца, соответствующего пороговому значению, граница Z может быть уменьшена до определенной величины, например, 2 микронов, и область в рамке сканируется повторно. Это можно выполнять пошаговым способом, пока пользователь не будет удовлетворен изображением и не пойдет дальше. Предпочтительно, чтобы настроенная граница Z поддерживалась, пока пользователь не сменит область сканирования.
В дополнение к автоматизации, режим PFT может быть использован для доведения до максимума способности гарантировать качество изображения и получать замеры механических свойств образца в каждой точке сканирования (т.е. пикселе) образца. Например, режим PFT может быть использован для контроля радиуса острия. Одним существенным недостатком при получении высококачественного изображения является затруднение для пользователя в определении дефектов острия зонда. Острие может стать дефектным из-за загрязнений (построение изображения жидкого или маслянистого образца и др.) или нарушений физической структуры при построении изображения из-за износа (например, затупления острия). Дефектное острие можно идентифицировать путем пересмотра кривой силы, полученной в точке образца. На Фиг. 34 показан отрезок кривой силы, указывающий на состояние острия. На Фиг. 34 схематический график 1801 представляет собой траекторию острия. Эта траектория может быть частью синусоидального сигнала, и произвольная форма определяется при помощи контрольного сигнала сканера. В позициях, близко расположенных к образцу, сила притяжения Ван-дер-Ваальса строится как сегмент А-В на схематическом графике 1802, где 1802-1 представляет собой базовую линию невзаимодействующей нулевой силы. Уклон этого сегмента определяется при помощи радиуса острия. Больший радиус острия заставит точку А сдвинуться влево, что соответствует более раннему нарастанию силы Ван-дер-Ваальса. Анализируя сегмент А-В, можно рассчитать радиус острия и сделать вывод о его остроте. В частности, уклон участка А-В содержит указания свойств острия (пунктирная линия, схематически иллюстрирующая отклик при наличии таких свойств). Из-за того что в режиме PFT одна или более кривых сил генерируются в каждом пикселе, наблюдение сил острия может вестись практически одновременно со сканированием. Следовательно, вместо того чтобы прервать построение изображения и получить кривую испытательных сил в попытке выявить дефектность острия, АСМ, работающий в режиме PFT, может идентифицировать это состояние автоматически в каждой точке сканирования (например, каждые несколько сотен микросекунд). При выявлении дефекта сканирование может быть прервано с уведомлением пользователя и, таким образом, предотвращается дальнейший сбор бесполезных данных, а пользователь заменяет дефектное острие.
На состояние острия может указывать загрязнение. Такое загрязнение определяется анализом затененной области «w» на схематическом графике 1803 на Фиг. 34, известной как работа адгезии. Работа адгезии усиливается, если острие загрязнено водой или другим веществом, которое может образовать мениск при отходе острия от поверхности. Повышенная работа адгезии представляет более серьезные загрязнения. Поскольку кривая силы получается в каждом пикселе, зависимость состояния острия от загрязнения также можно непрерывно наблюдать.
Если острие функционализировано посредством определенных химических связей, такими как полиэтиленгликолевые или дендроновые, работа адгезии привносится целенаправленно. В этом случае функционализированные связи генерируют значительную работу адгезии только тогда, когда острие взаимодействует с образцами, демонстрирующими определенное взаимодействие в молекулярных узлах, образующих связи, например, с полиэтиленгликолем или дендронами. Наблюдая эти взаимодействия, на основании карты адгезии можно построить карту химического или биохимического распознавания.
Также можно применять электрические, оптические, магнитные или термические возмущения или возбуждения, синхронизированные с контактной точкой D на схематическом графике 1802, Фиг. 34. Синхронное определение тока, напряжения, тепловых свойств, магнитного отклика или отклика оптической спектроскопии может дать устойчивый сигнал для улучшения помех, т.к. точка D представляет собой контроль взаимодействия ближней зоны образца (или ближнего поля взаимодействия).
ПРЕИМУЩЕСТВА РЕЖИМА PFT, ПРОСТОТА В ПРИМЕНЕНИИ
В общей сложности режим PFT предоставляет несколько эксплуатационных преимуществ, позволяющих неопытным пользователям работать с АСМ. При рассмотрении простоты применения следует учитывать несколько факторов построения изображения для сведения к минимуму необходимости в опытном пользователе. Во-первых, необходимо поддерживать стабильность обратной связи, и, при помощи вышеописанной автоматической подстройки/программного изменения коэффициента усиления в режиме PFT, стабильность обеспечивается без опытного пользователя, который смог бы произвести ручную регулировку усиления. Затем, для получения качественного изображения, АСМ должен отслеживать поверхность образца. При помощи базового контроля текущей силы взаимодействия острия-образца может быть выбрана заданная сила для оптимального прослеживания с минимальной погрешностью. Также скорость сканирования и автоматический контроль границы Z, как описано выше, работают на сведение к минимуму необходимости в опытном пользователе при эксплуатации АСМ без ухудшения показателей скорости или способности выполнять построение высококачественного изображения.
В отличие от известных колебательных режимов работы АСМ, таких как полуконтактный режим, режим PFT использует совершенно другой динамический режим. Заданным значением колебательного режима, как правило, является амплитуда или фаза колебания, параметр, который имеет очень сложные отношения с силами и взаимодействиями острия/образца. Как уже говорилось здесь, режим PFT учитывает каждую точку колебания острия, т.к. острие взаимодействует с поверхностью образца и использует соответствующие данные о силах в схеме обратной связи. Это позволяет предпочитаемым вариантам конструкции работать без обратной связи, контролируемой пользователем, и без требуемых регулировок, выполняемых пользователем во время построения изображения (автоматическая минимизация ошибочного сигнала). Режим PFT также обеспечивает прерывистый контакт с образцом (и его понятные преимущества) с подстройкой (требующей выполнить только простую последовательность перед построением изображения - Фиг. 30), и позволяет производить наладку без подстройки. В результате новичок может выполнить построение изображения с разрешением ниже определенного (например, 1 нН) и при скорости выше определенной (например, 1/2 Гц, 256 пикселей), без необходимости производить подстройку.
Более того, благодаря наличию кривой силы для каждого пикселя пользователь может получить детерминированные данные (например, об адгезии) с приемлемой скоростью и с определенным разрешением, и может продолжать выполнять построение изображения. Это все возможно за счет обратной связи, действующей непосредственно на силу (острие-образец), которая позволяет получать отклик на основании простого взаимодействия между острием и образцом (представляющем линейную функцию переноса - прямой контраст с известными колебательными режимами).
Примечательно, что все вышеизложенные принципы могут также применяться в электрическом контексте (например, со сканирующим туннельным микроскопом), где прибор получает обратную связь за счет тока.
Также, из-за сложного характера обратной связи данные, получаемые в традиционных колебательных режимах, обычно требуют сложной непрямой интерпретации. Режим PFT позволяет выполнять прямую интерпретацию полученных данных, т.к. они основываются больше на кривой силы, а не на полуконтактном «контуре».
Другое преимущество работы в режиме PFT включает возможность выполнять построение изображения конкретных образцов более эффективно. Например, при работе с полупроводниками невозможность АСМ надежно выполнять построение изображения узких канавок часто приводила к тому, что пользователи предпочитали производить измерения при помощи метрологических приборов, а не АСМ. Однако в режиме PFT нет демпфирования между острием и образцом (например, демпфирования слоя под давлением), что обеспечивает достоверное измерение свойств образца с высоким характеристическим отношением.
В дополнение к этому, режим PFT не подвержен дрейфу контрольного параметра. Например, в полуконтактном режиме АСМ амплитуда свободного воздуха может меняться в процессе построения изображения, что приводит к изменению сил острия-образца и может привести к потере взаимодействия острия-образца. Такой дрейф (значения) не позволяет АСМ работать в полуконтактном режиме над построением изображения стабильно в течение длительного времени. В режиме PFT пользователь может выполнять построение изображения более часа (включая ночную смену) против периода менее часа с использованием традиционных колебательных режимов АСМ.
В целом в режиме PFT отсутствует привязка отклика кантилевера на окружающие условия. Построение изображения в вакууме (жидкости) и атмосфере может быть выполнено без изменения настроек, таким образом, прибор является очень простым в использовании. Частота колебаний может быть настроена независимо от какого-либо резонанса кантилевера, что существенно упрощает применение в жидкости. В частности, известные прерывистые контактные режимы требуют работы с резонансом, в то время как режим PFT предпочтительно работает на дорезонансных колебаниях. Это, опять-таки, результат возможности производить контроль, основанный на ультрамалых мгновенных (не средних) силах (примерно от 1 мкН до 1 пН). В результате АСМ также может получать обратную связь быстрее, предполагая, что кантилевер Q можно не принимать во внимание при дорезонансе (функция переноса не зависит от накапливаемой энергии в кантилевере при резонансе). Наконец, режим PFT также позволяет использовать кантилеверы, имеющие коэффициент жесткости пружины до 1 до 10 Н/м, как говорилось выше.
Обратимся к Фиг. 35(a)-(d), серии графиков, иллюстрирующих альтернативный метод выполнения измерений физических свойств образцов при помощи режима PFT на показанном образце. Фактически графики отображают регулируемые физические измерения, которые в значительной степени совпадают с взаимодействиями острия-образца, связанными с режимом PFT. Вертикальные линии p1-p5 отмечают время каждого физического события, определенного на Фиг. 35(b), на котором показаны результирующие силы зонда-образца, полученные за один период взаимодействия зонда-образца в режиме PFT. Все данные собраны на графике за один период взаимодействия с максимальной силой между острием и образцом за время от «0» до конца периода Т. Линия p1 представляет время взаимодействия зонда у острия-образца, определенного по отклонению кривой силы взаимодействия в точке В от его нулевой контрольной линии 1. Линия p2 представляет переход силы взаимодействия в точке В′, где знак первого производного на кривой силы изменяется. Точка B′ может быть минимальной точкой или любой точкой у первого производного переходного участка. Линия p3 представляет точку максимальной силы С, демонстрирующую локальный максимум, где знак первой производной силы меняется снова. Линия p4 представляет смену знака другой первой производной в точке Е. Точка Е может быть минимальной точкой или любой точкой у первой производной участка перехода. В точке Е′ линия p5 представляет убывание вблизи (точки) силы взаимодействия, когда сила взаимодействия приближается к горизонтальной линии 1 нулевой силы (точка F).
Измерение силы взаимодействия на Фиг. 35(b) выполняется методом контроля отклонения кантилевера зонда. Контроль позиционирования поверхности зонда на Фиг. 35 (а) выполняется приводом, перемещающим кантилевер зонда относительно образца. Траектория острия относительно образца может быть синусоидальной, как показано на Фиг. 35(а), или любой произвольной формы для намеренного уменьшения или увеличения любого сегмента времени с p1 to р5, как принято в уровне техники. Можно сделать это, например, для увеличения или уменьшения рабочего режима. Та же частота модуляции меняется в р2-р4, например, из-за температурного расширения, при изучения свойств вязкости-эластичности, меняется в р2-р4 от 1% до 50% рабочего цикла. Короткий рабочий цикл позволяет изучать зависимость времени от воздействий вязкости-эластичности. Длинный рабочий цикл может быть предпочтительным для p1-p2, времени отсутствия контакта, для оптических измерений и для измерения температуры; увеличение рабочего цикла р2-р4, по возможности больше, позволяет прибору интегрировать сигнал в течение более длительного периода времени.
Промежуток времени между p1 и р2 - это зона близкого взаимодействия, где острие взаимодействует с образцом с определимой отрицательной силой притяжения (Ван-дер-Ваальса), например. Другие примеры включают электрические или магнитные силы. Этот участок представляет силу взаимодействия большого диапазона, обычно отражая отрицательную силу (или притяжения). Тот же участок близкого взаимодействия встречается снова между р4 и р5, где минимальная сила взаимодействия включает как силу Ван-дер-Ваальса (или электрическую, магнитную силу), так и капиллярное взаимодействие на острие зонда. Этот участок также демонстрирует отрицательную силу (притяжение) в большинстве случаев.
Промежуток времени между линиями р2 и р3 - это участок контактного взаимодействия. Это время измерено путем определения силы взаимодействия, встречающегося между двумя точками перехода В′ и Е. Участок контакта обычно сопровождается повышением силы взаимодействия до более позитивного значения, как между точками В′ и С. В точке С контроль Z начинает отводить зонд назад. Но зонд остается в контакте с образцом до точки Е, где острие зонда теряет контакт и капиллярные взаимодействия.
Перейдем к Фиг. 35(c), где отображено, как физические взаимодействия, отличные от механической силы, происходят между острием и образцом. Такое взаимодействие может быть отрегулировано селектируемым напряжением между острием и образцом. Его также может вызывать любое другое внешнее взаимодействующее поле, например магнитное. На Фиг. 35(d) измеряется физический отклик зонда, такой как электрический ток между острием и образцом, и измеряется в этом случае только на контролируемом участке между линиями p2 и p4. Контролируемое измерение синхронизировано с контролем положения зонда на Фиг. 35(a) и определением силы, проиллюстрированным на Фиг. 35(b), описанном выше. Сигналы, отличные от идущих с контролируемого участка, считаются паразитными шумами и могут быть отделены при обработке сигнала. Такая обработка сигнала может быть в форме усреднения всех неэффективных (например, отсутствие тока при применении напряжения, отсутствие контакта при физическом отклике) данных о физическом отклике, идущих из-за пределов контролируемого участка между линиями p1 и p5, которые можно использовать как фоновый паразитный шум, отделяемый в каждом периоде измерения. Блок-схема цепи, иллюстрирующая эту систему, показана на Фиг. 39.
В альтернативных вариантах исполнения сигнал физического возбуждения может быть с подводимым к образцу или зонду теплом, и контролируемый физический отклик может подвергаться температурным колебаниям на контролируемом временном участке между p2 и p4. Применение тепла или теплового возбуждения на Фиг. 35(c) может осуществляться за счет встраивания нагревательного элемента в зонд или в образец и подвода тока к нему для выработки требуемого количества тепла, например для проведения температурных замеров. Блок-схема цепи, иллюстрирующая эту систему, показана на Фиг. 40.
В дальнейших вариантах исполнения сигнал возбуждения на Фиг. 35(c) может быть электромагнитной волной, и уловленный сигнал на Фиг. 35(d) может отражать изменение полного сопротивления в контролируемой временной зоне между p2 и p4.
Применение электромагнитной волны, такой как микроволна, может быть достигнуто за счет применения направляющей волны в образце или зонде. В качестве альтернативы сигнал возбуждения на Фиг. 35 (c) может быть оптическим возбуждением, и определенный сигнал на Фиг. 35 (d) может быть изменением оптического спектроскопического отклика в контролируемой временной зоне между р2 и р4. В других вариантах исполнения сигнал возбуждения на Фиг. 35 (c) может быть сигналом напряжения, а уловленный сигнал на Фиг. 35 (d) может отражать изменение электрического сопротивления в контролируемой временной зоне между р2 и р4. Подача напряжения может быть достигнута за счет обеспечения проводимости части образца и части зонда, которая электрически соединена с образцом. Далее, в другом варианте исполнения, сигнал возбуждения на Фиг. 35 (c) может быть магнитной силой, и уловленный сигнал на Фиг. 35 (d) может быть изменением электрического или магнитного отклика в контролируемой временной зоне между р2 и р4. Применение магнитной силы может быть достигнуто за счет использования острия, часть которого является постоянным или подвижным магнитом, а изменение электрического измерения может отображать ток, напряжение или сопротивление во временной зоне от р2 до р4. В этих альтернативных вариантах массив данных о свойствах образца может контролироваться и на них можно строить изображение, в отличие от предыдущих технологий АСМ, при условии, что режим PFT дает преимущества. Блок-схема цепи, иллюстрирующая эти альтернативные системы, использующие разные формы возбуждения, представлена на Фиг. 41.
Примечательно, что наилучшее соотношение сигнал-шум обычно достигается при помощи контролируемого среднего измеренного тока. Однако максимальный ток или средний ток в одном цикле тоже может применяться.
Вернемся к Фиг. 36 (a)-(d). Вышеприведенное описание Фиг. 35 (a)-(d) отличается от Фиг. 35 (c) и 36 (c). В этом случае сигнал возбуждения остается постоянным, притом что измерение физического отклика происходит только в контролируемой временной зоне. Например, постоянное возбуждение может перегреть или выжечь образец, следовательно, возбуждение должно быть только при необходимости. На Фиг. 37(a)-(d) контролируемый участок изменяется за время между p1 и p2 на основании типов измерения физических свойств, предпочитаемых пользователем. Примите во внимание, что возбуждение на Фиг. 37(c) может быть постоянным (как на Фиг. 36), в отличие от контролируемой функции. На Фиг. 38(a)-(d) контролируемый отклик случается во временной зоне между p3 и p4. Иногда самым целевым для пользователя является участок до или после времени контакта. До контакта на участке ближнего поля можно обнаружить целевые данные, связанные с оптическими, электрическими и магнитными свойствами. Измерение механических свойств обычно производится на контактном участке. После контакта, минимум через секунду, например, может образоваться мениск и свойства, например адгезия, могут определяться на основании взаимодействия.
Хотя наилучший режим, проектируемый изобретателями, лежащий в основе данного изобретения, раскрыт выше, практическое применение вышеописанного изобретения не ограничивается им. Совершенно очевидно, что различные дополнения, изменения и комбинирования признаков настоящего изобретения могут быть внесены без отклонения от сущности и объема основной концепции изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ДОСТОВЕРНОСТИ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЯ ПОВЕРХНОСТИ ТВЕРДОГО ТЕЛА МЕТОДОМ АТОМНО-СИЛОВОЙ МИКРОСКОПИИ | 2008 |
|
RU2415444C2 |
| Способ визуализации вируса гриппа | 2017 |
|
RU2649763C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2003 |
|
RU2334214C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОМПАКТНЫМ СКАНЕРОМ | 2012 |
|
RU2571449C2 |
| СПОСОБ ИССЛЕДОВАНИЯ БИОСОВМЕСТИМОСТИ СИНТЕТИЧЕСКОГО МАТЕРИАЛА МЕДИКО-БИОЛОГИЧЕСКОГО НАЗНАЧЕНИЯ С БИОЛОГИЧЕСКИМИ ТКАНЯМИ | 2007 |
|
RU2381485C2 |
| Способ бесконтактной оценки проводимости индивидуальных углеродных нанотрубок | 2019 |
|
RU2720260C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП И СПОСОБ ИЗМЕРЕНИЯ СВОЙСТВ ПОВЕРХНОСТЕЙ ЭТИМ МИКРОСКОПОМ | 1996 |
|
RU2109369C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ЗОНДА | 2009 |
|
RU2512674C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2011 |
|
RU2461839C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ И ИССЛЕДОВАНИЯ ПОВЕРХНОСТИ ВНУТРИ ЯДЕРНЫХ И ТЕРМОЯДЕРНЫХ УСТАНОВОК | 2000 |
|
RU2169954C1 |
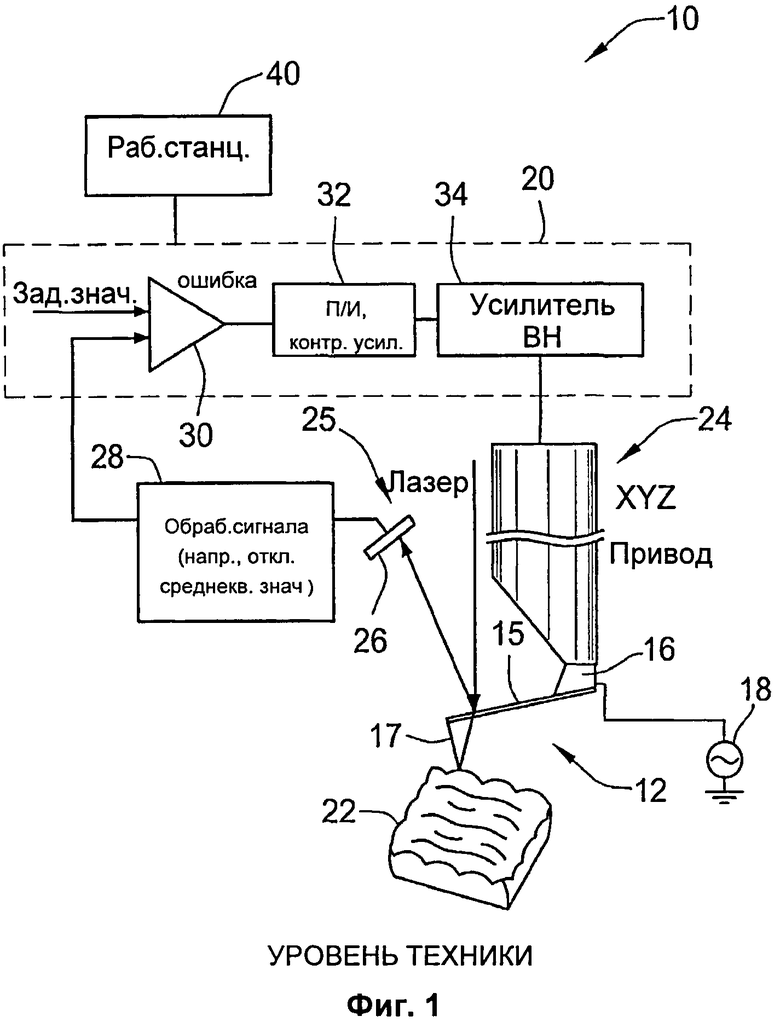
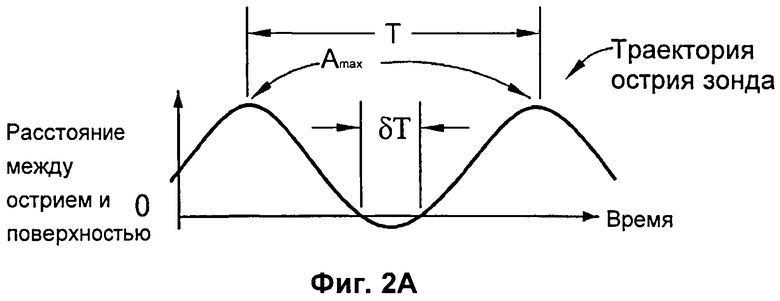
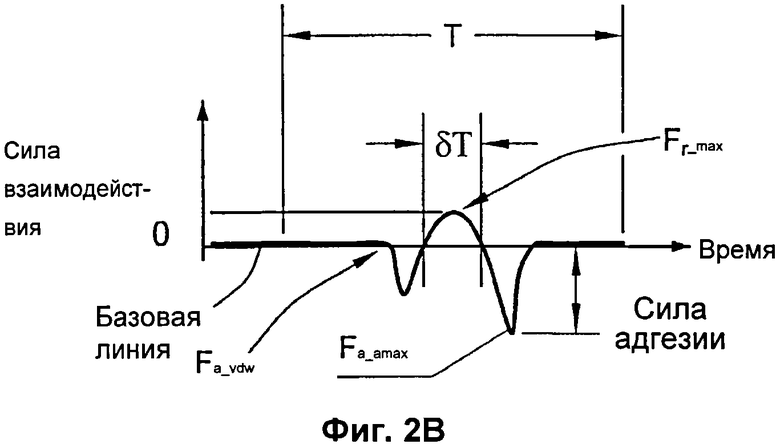
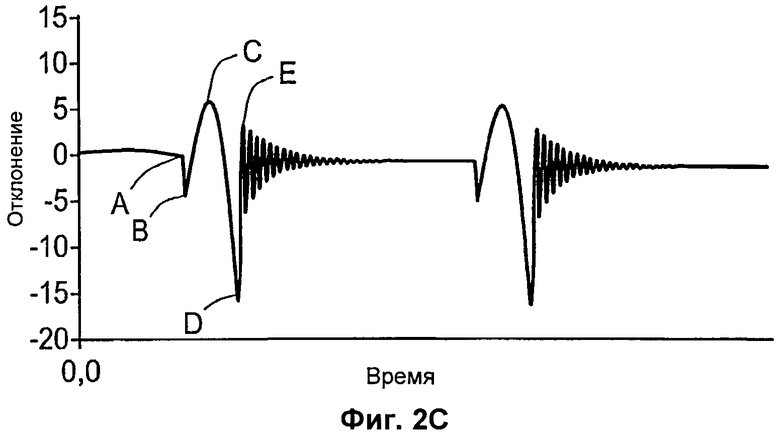
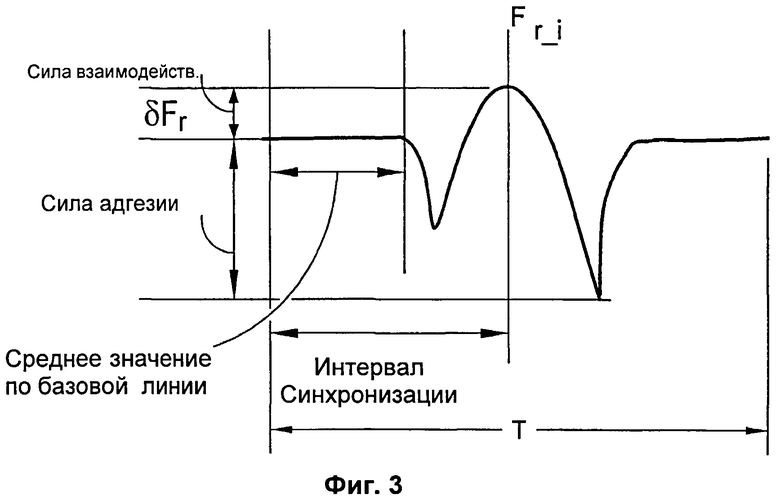
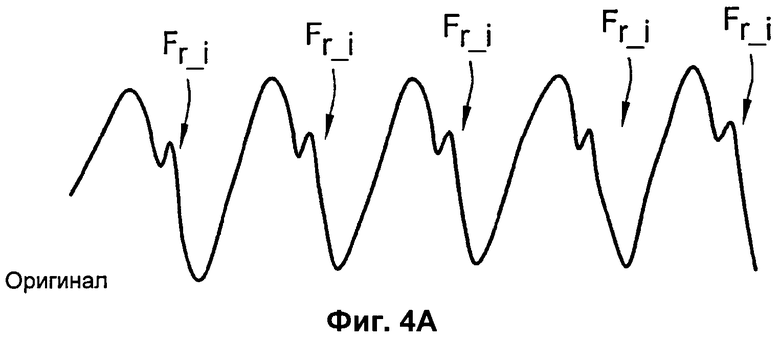
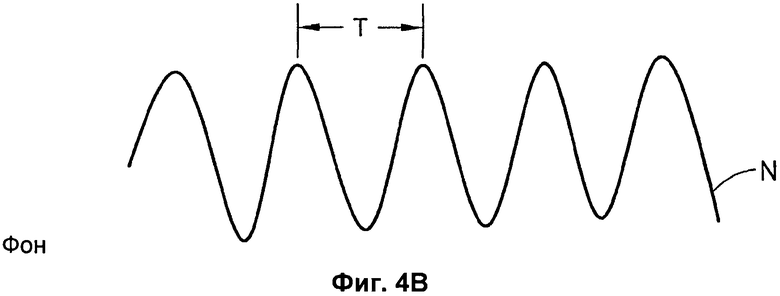
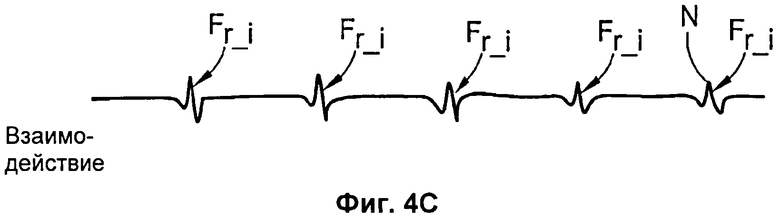
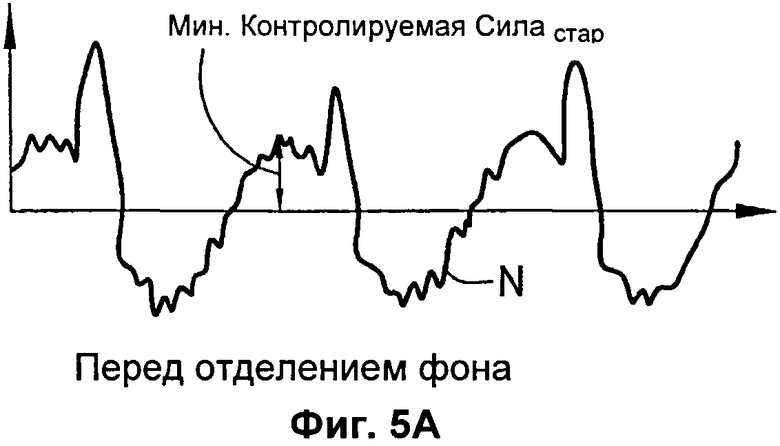
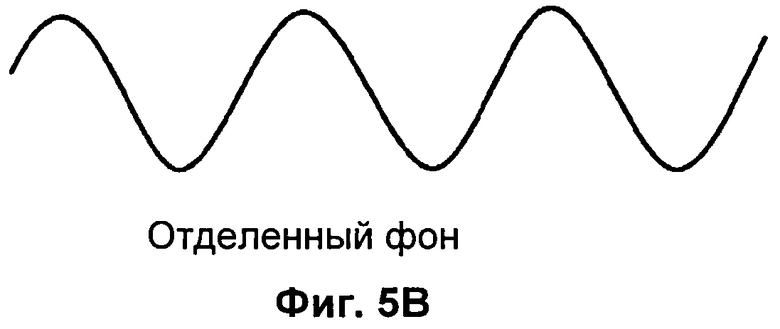
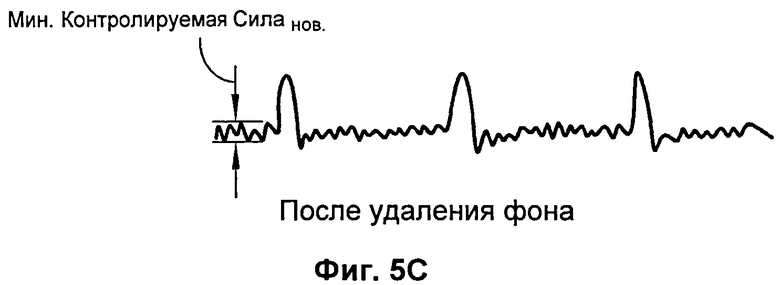
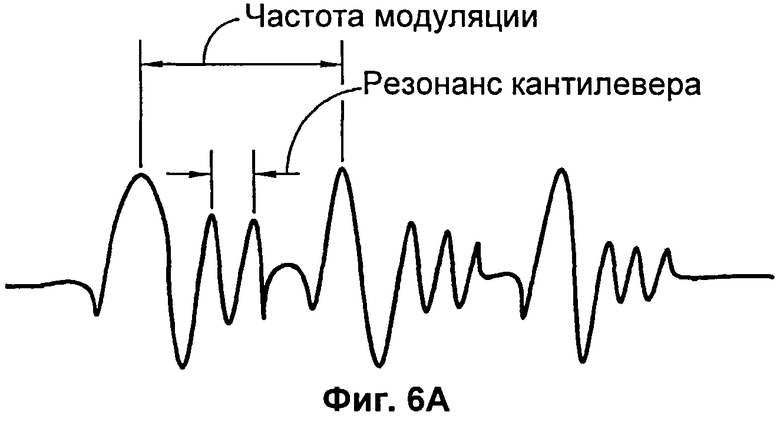
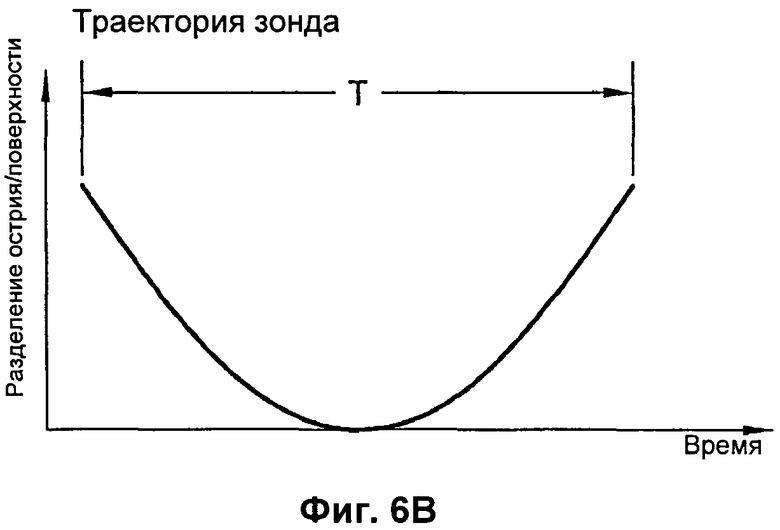
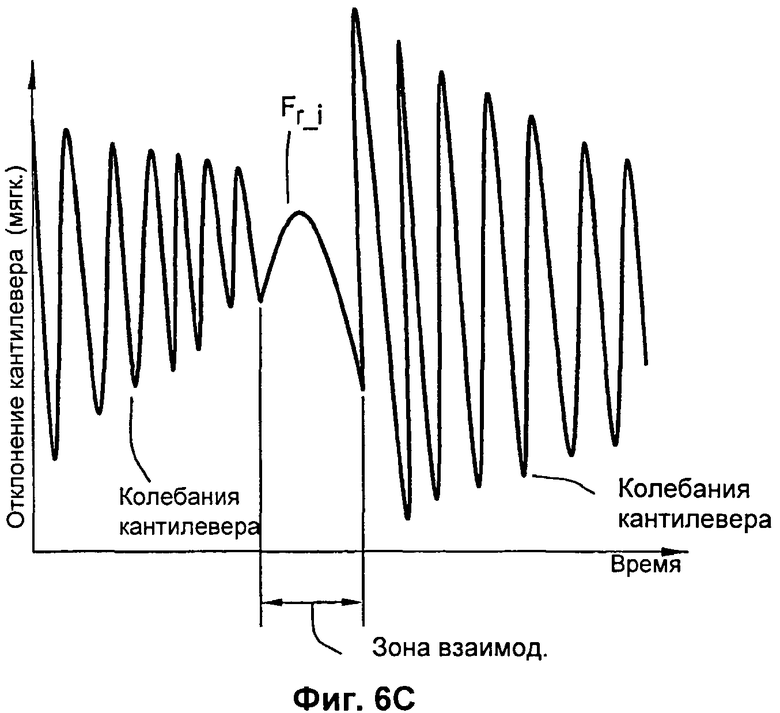
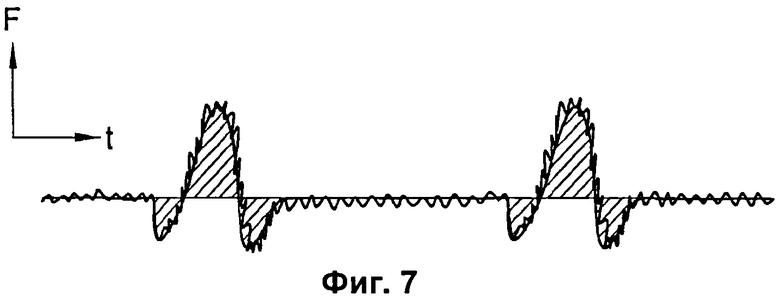
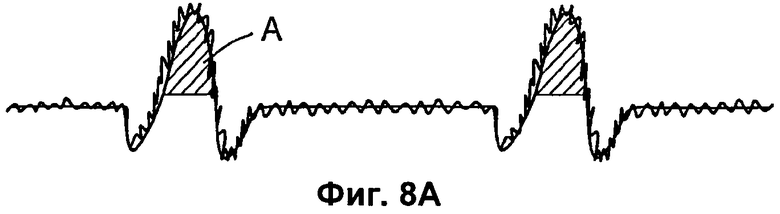

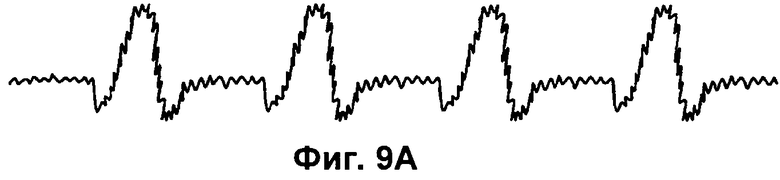

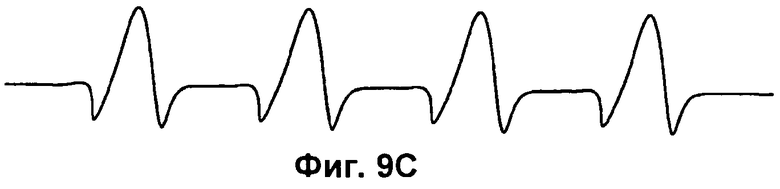
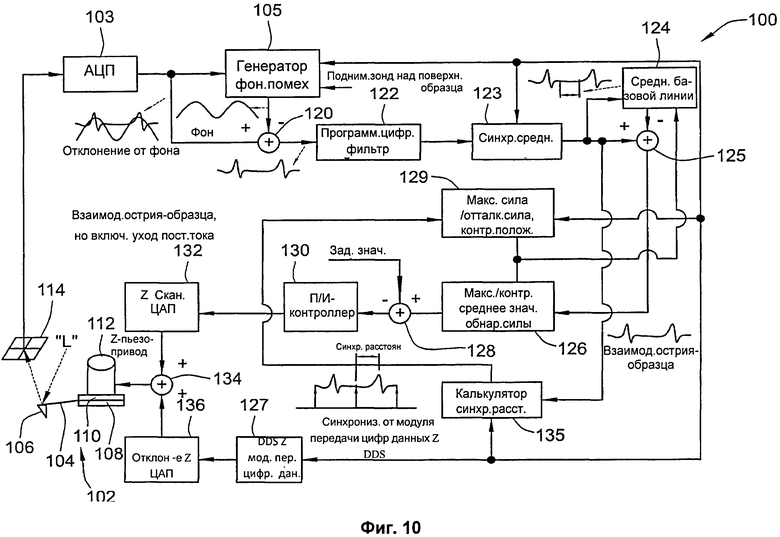
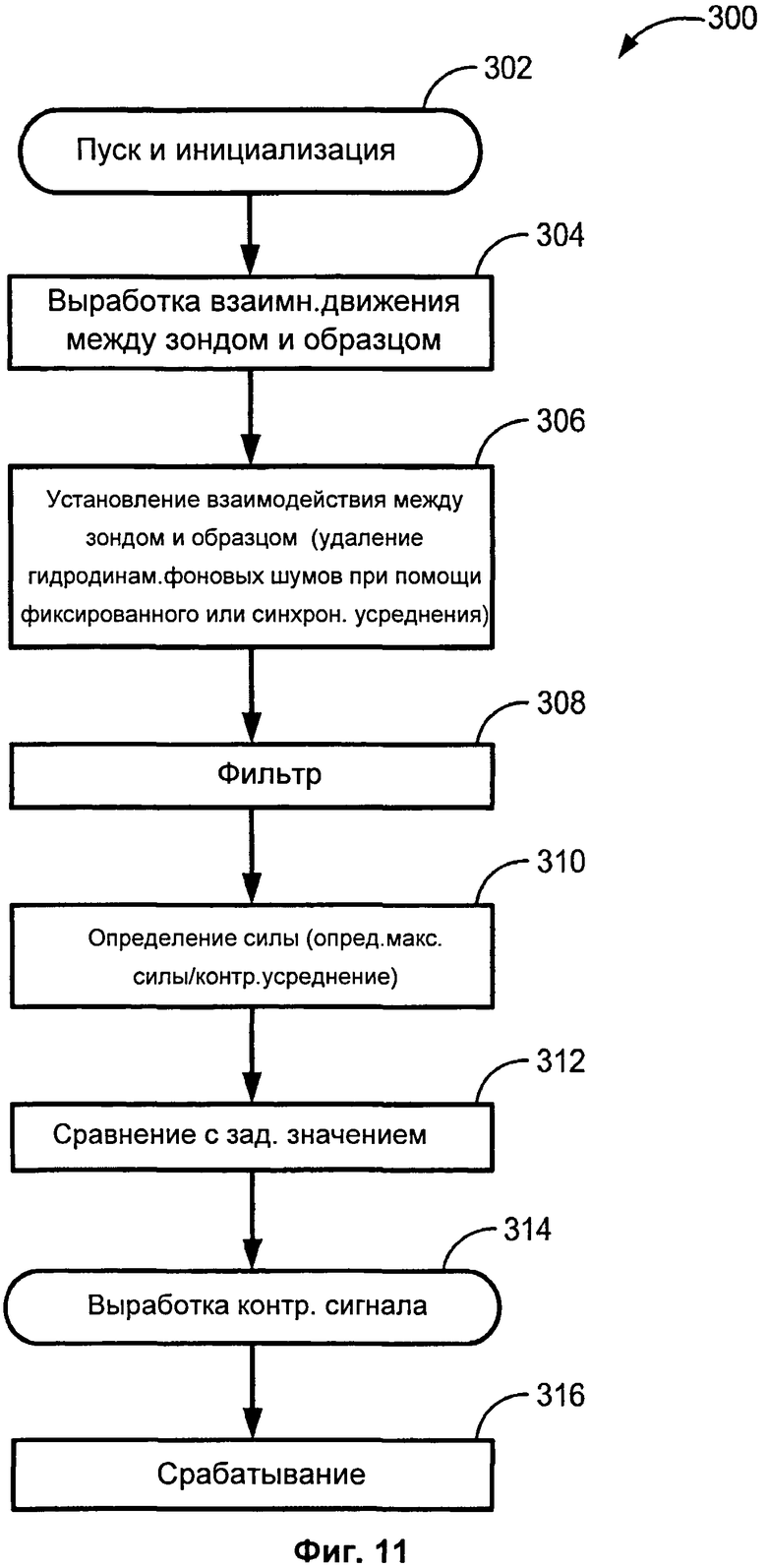
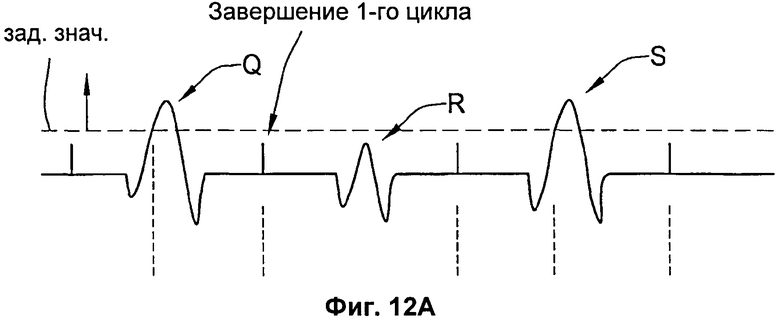
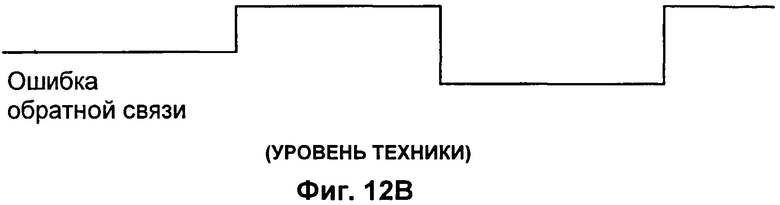
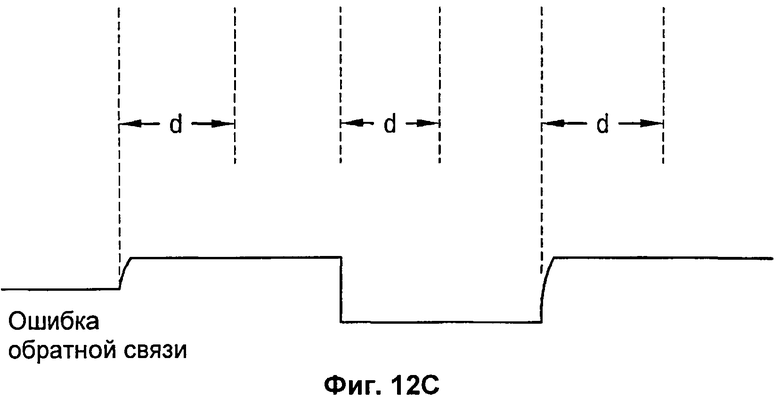
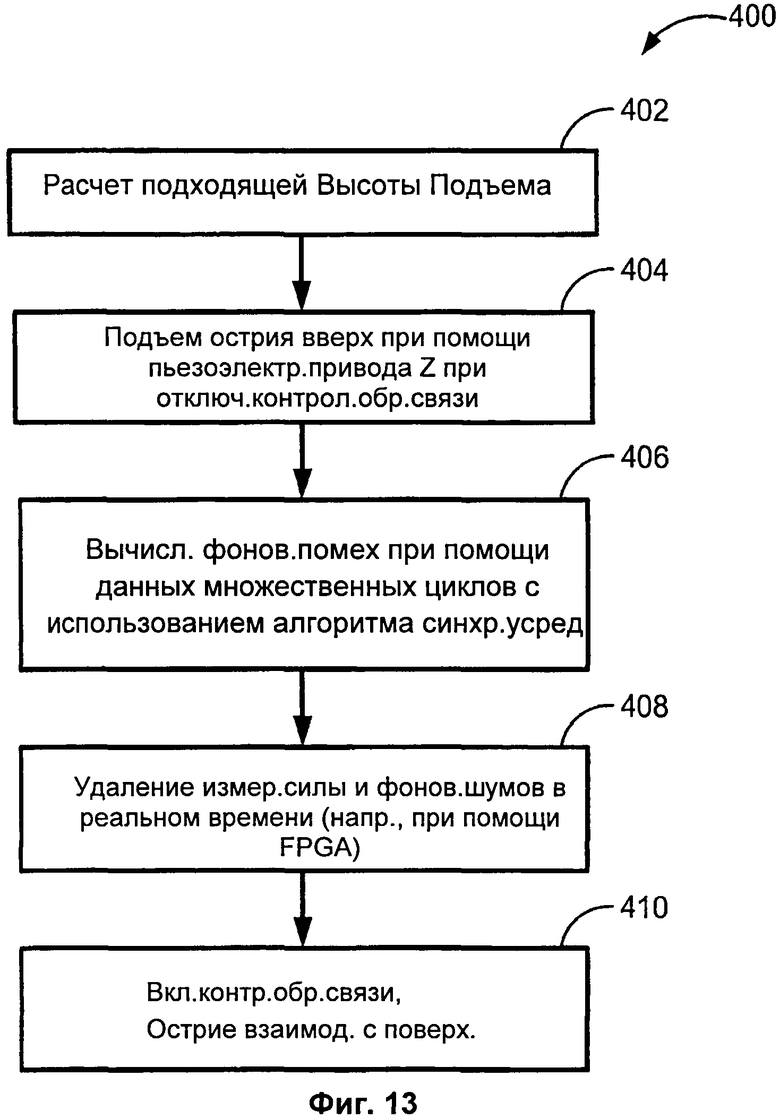
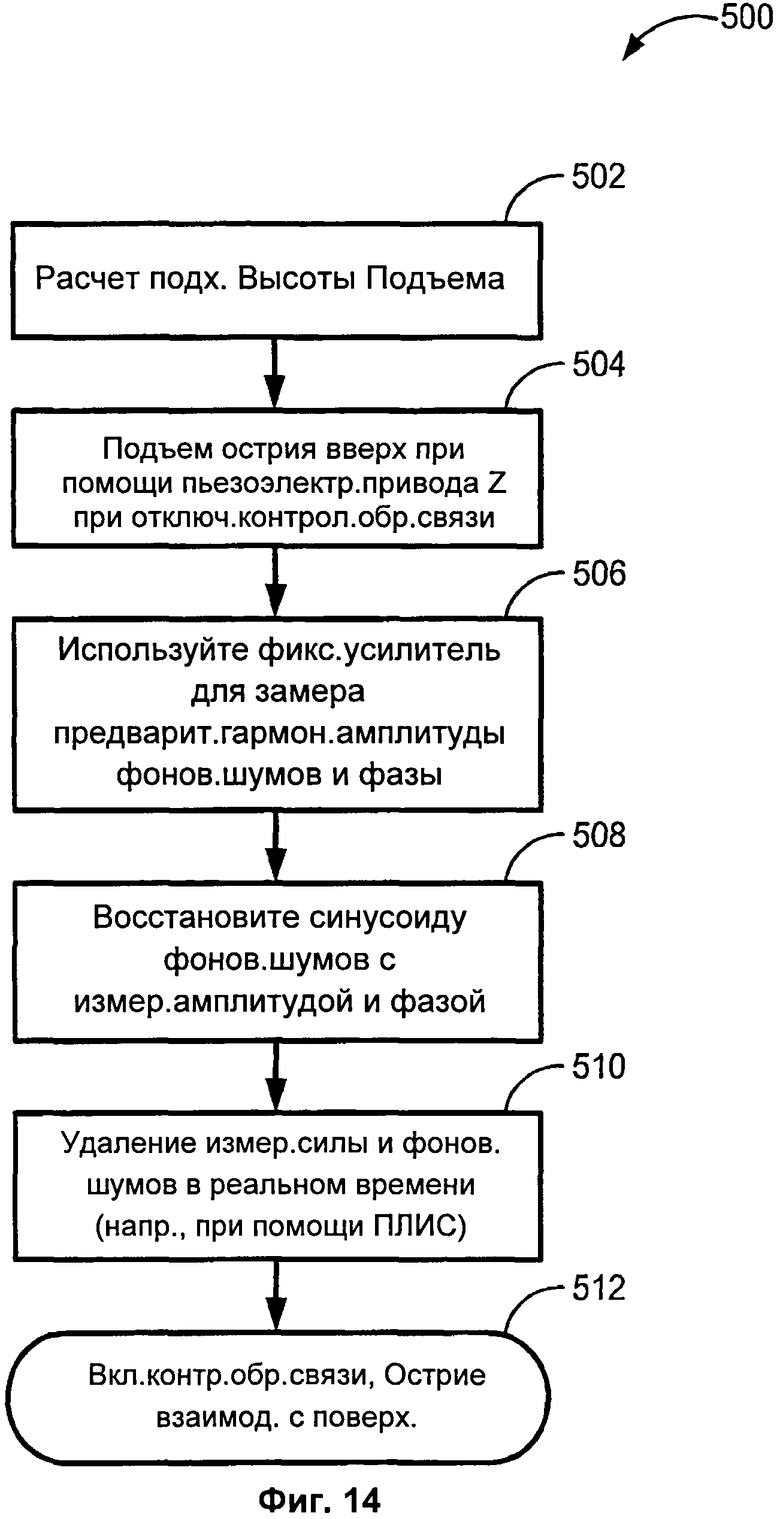

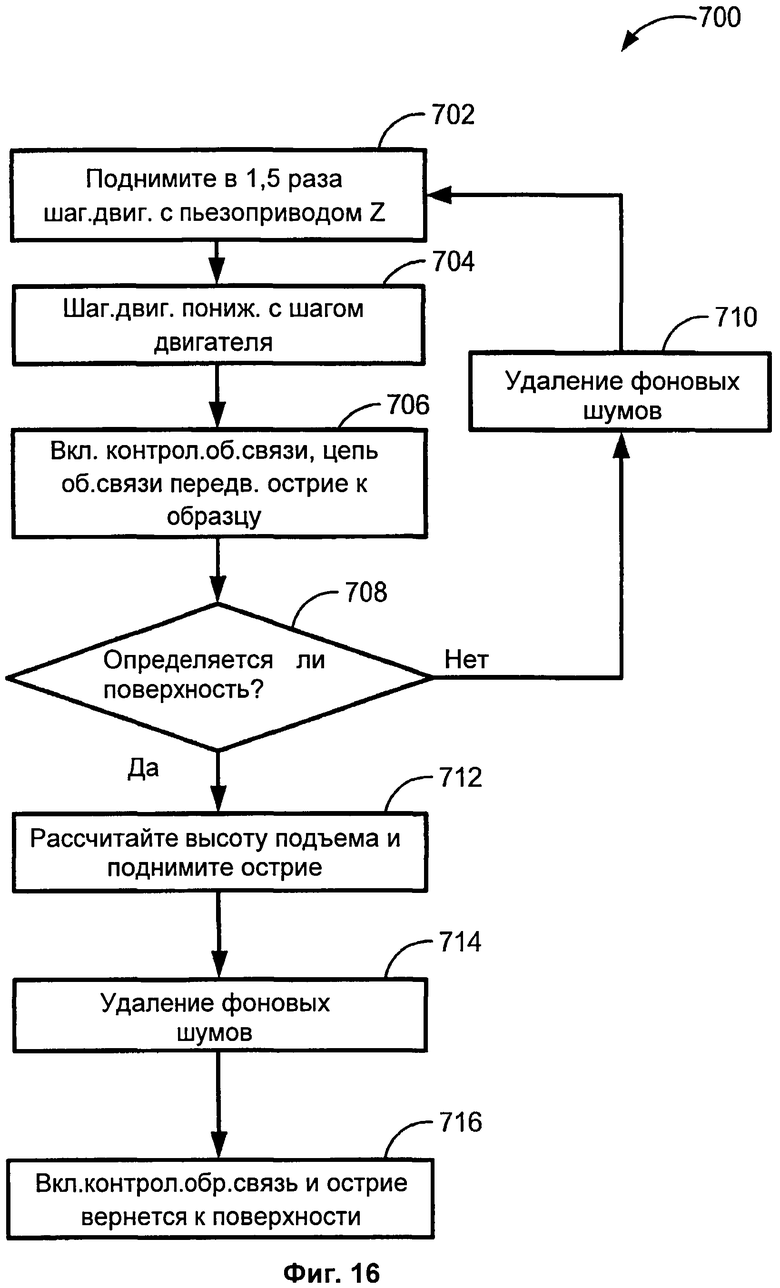
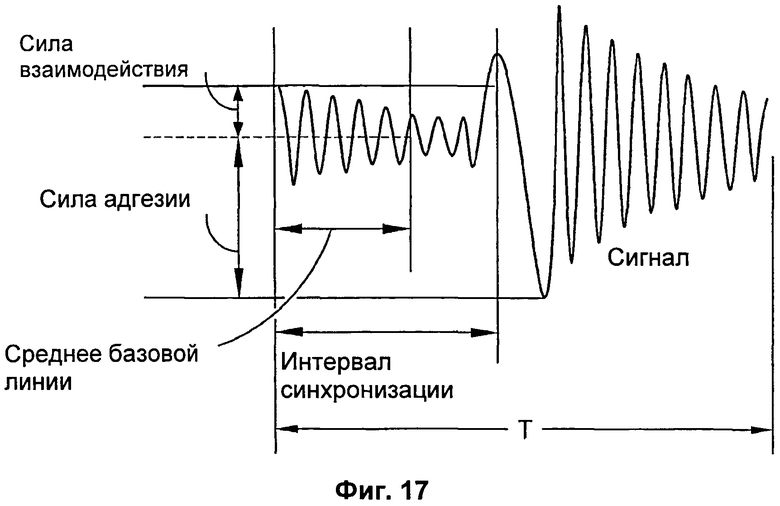
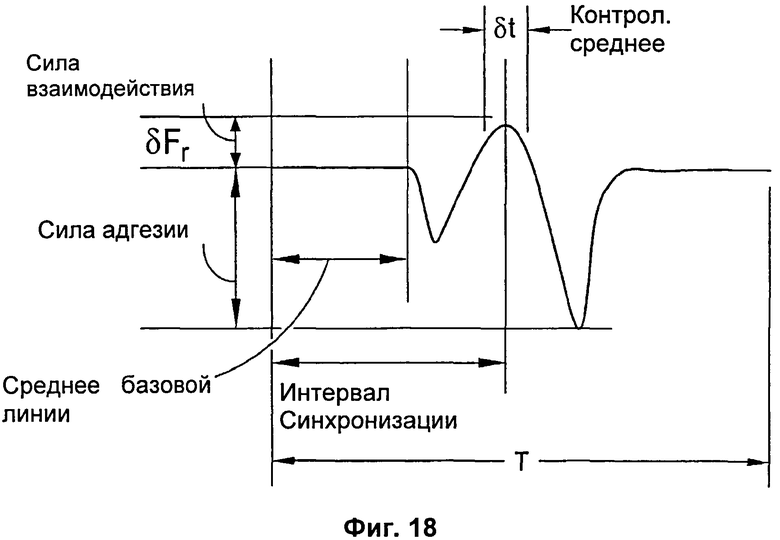
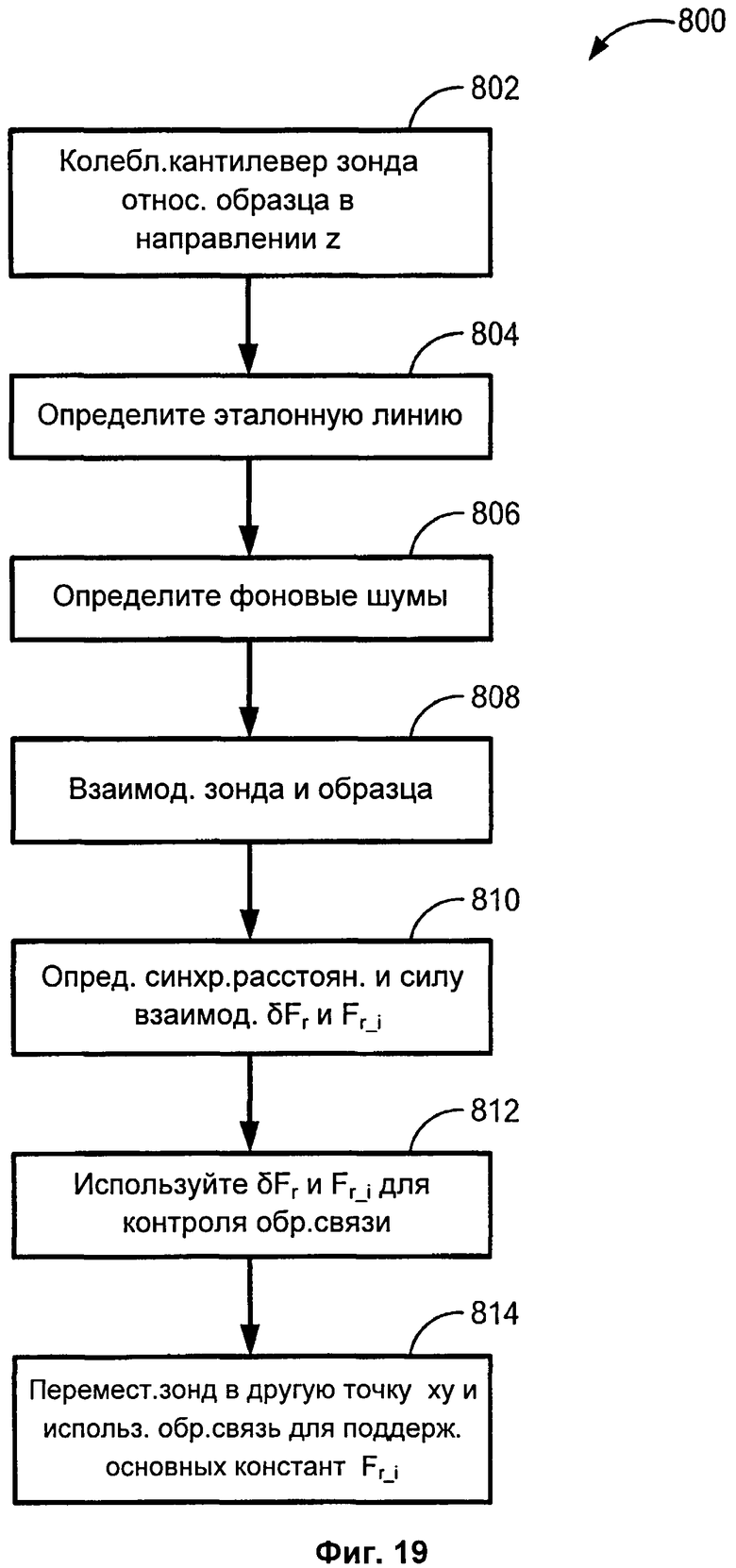
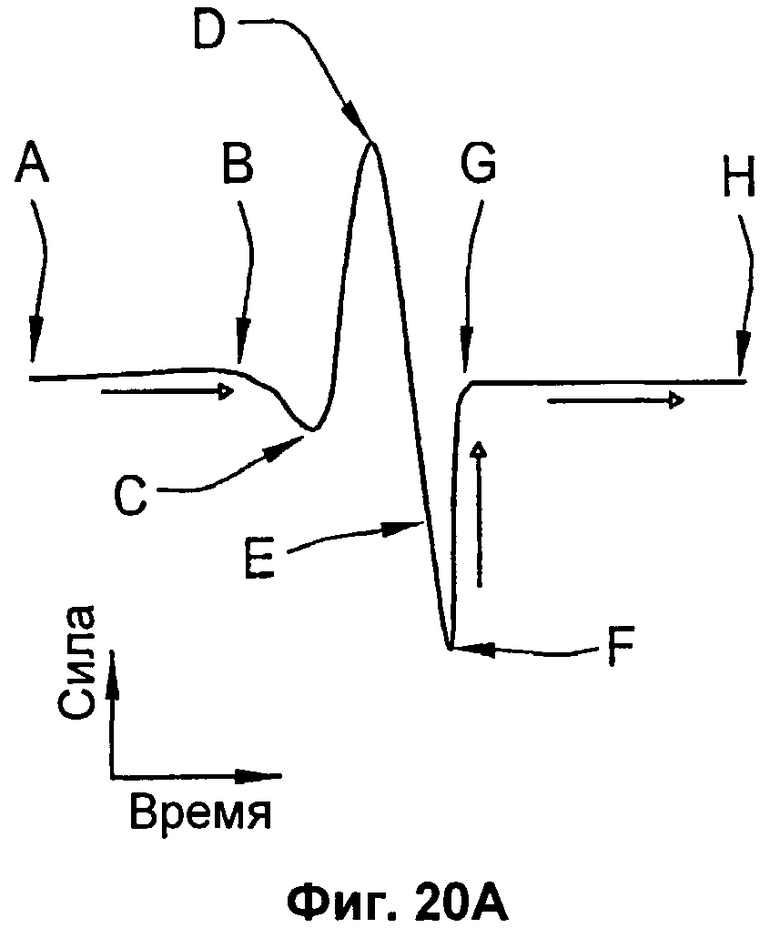
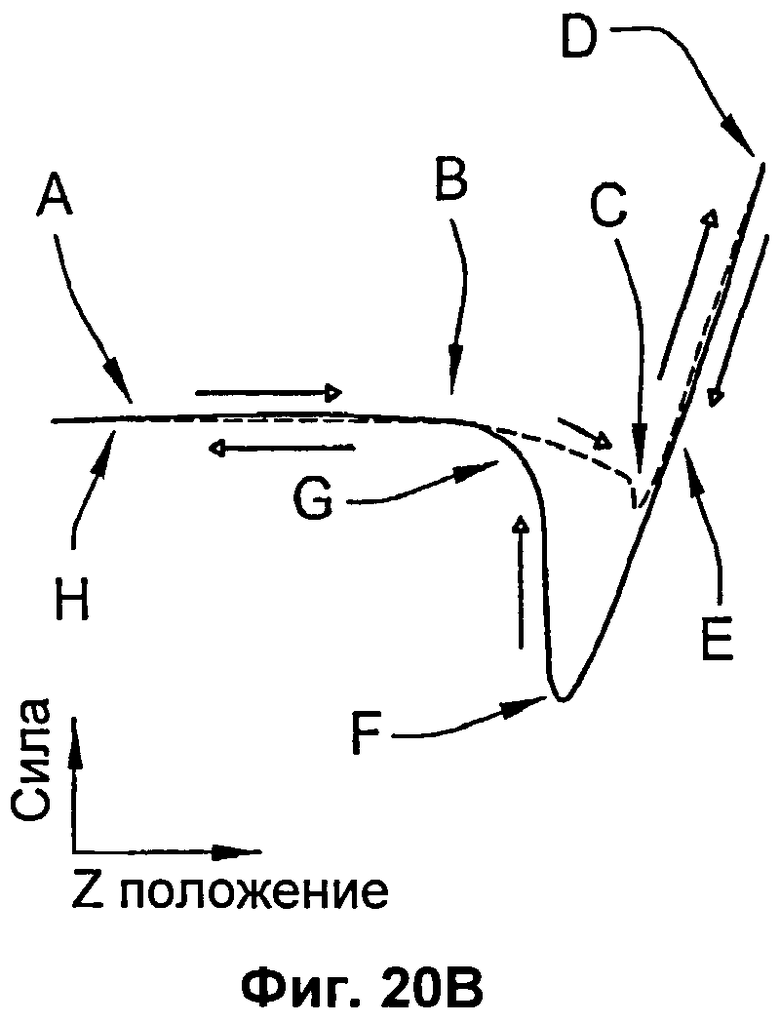

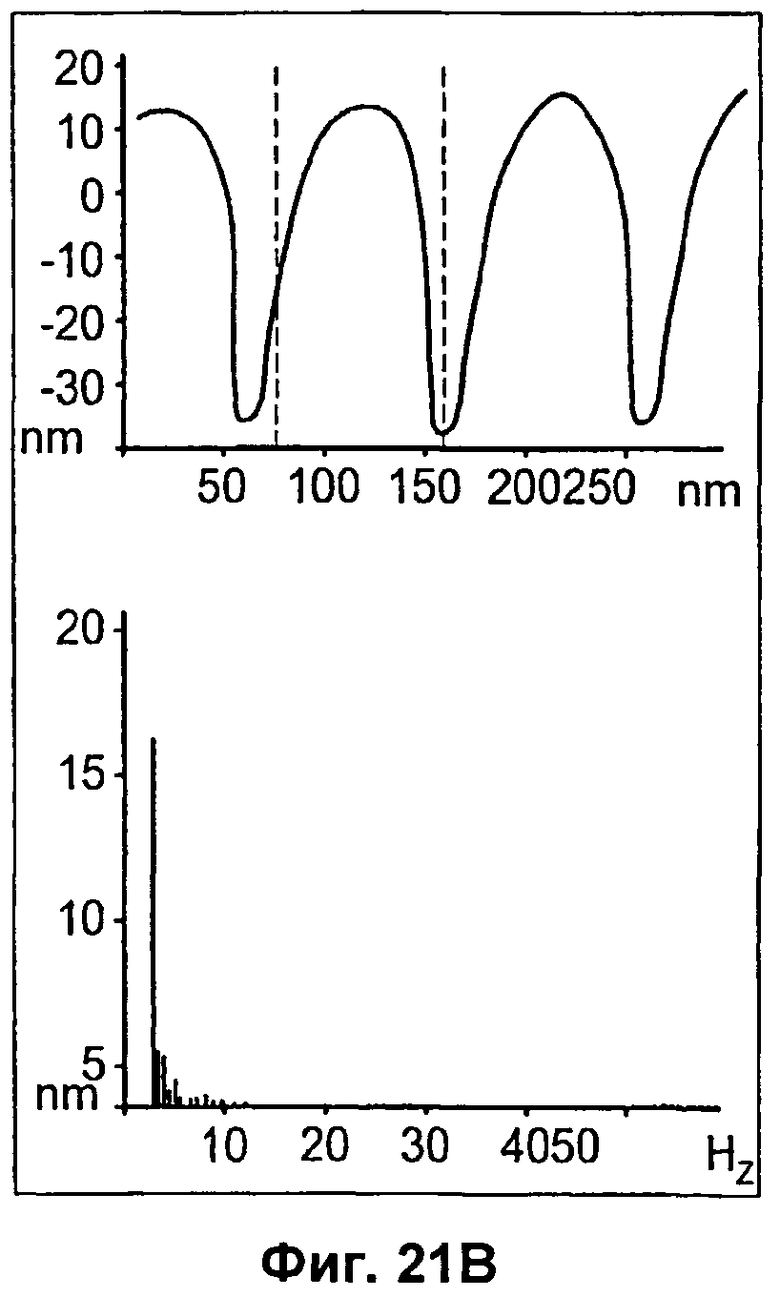
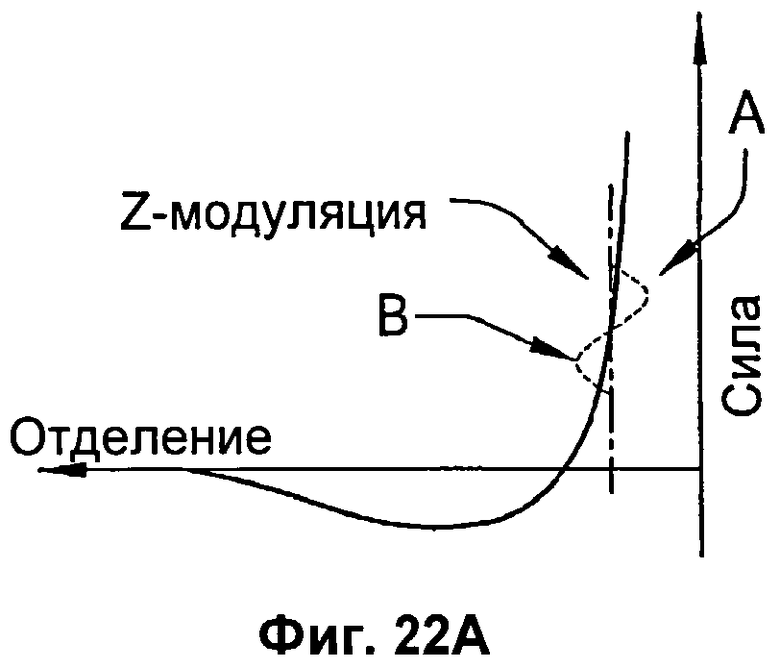
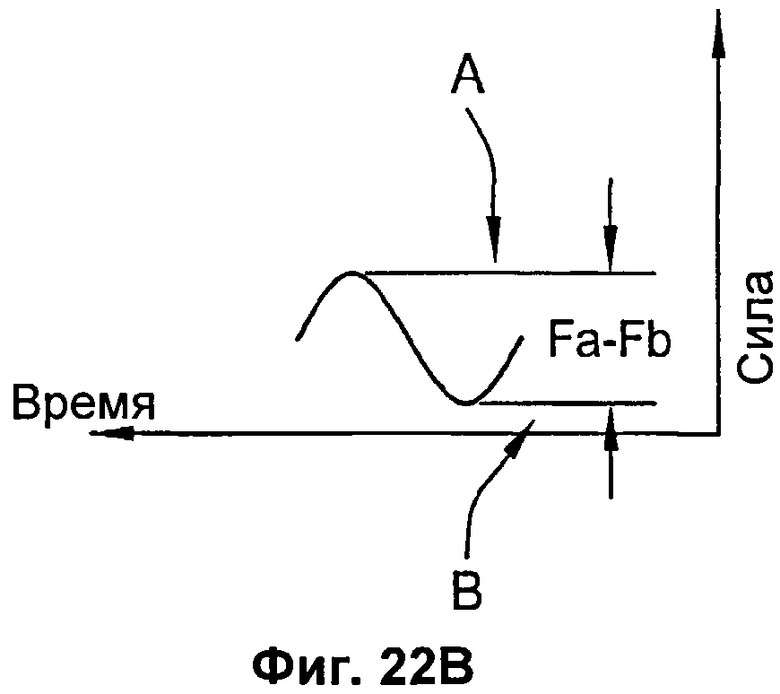
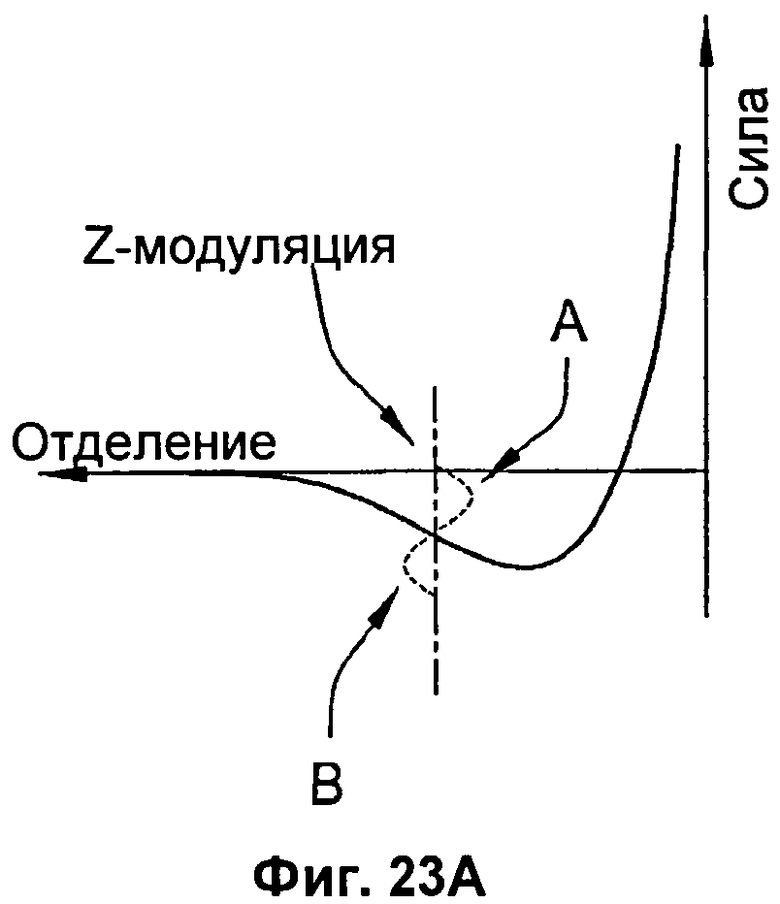
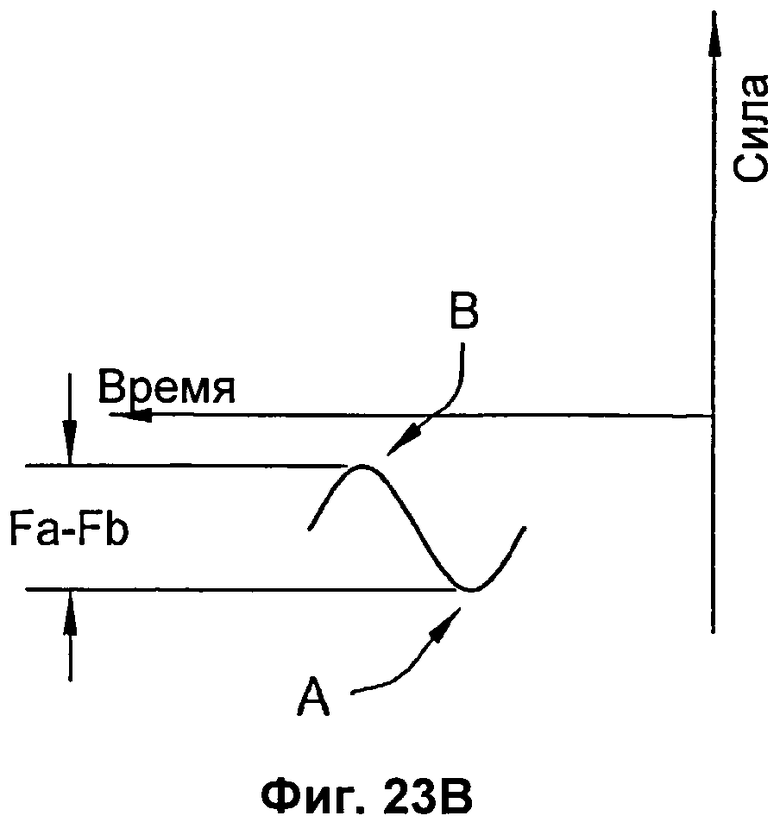
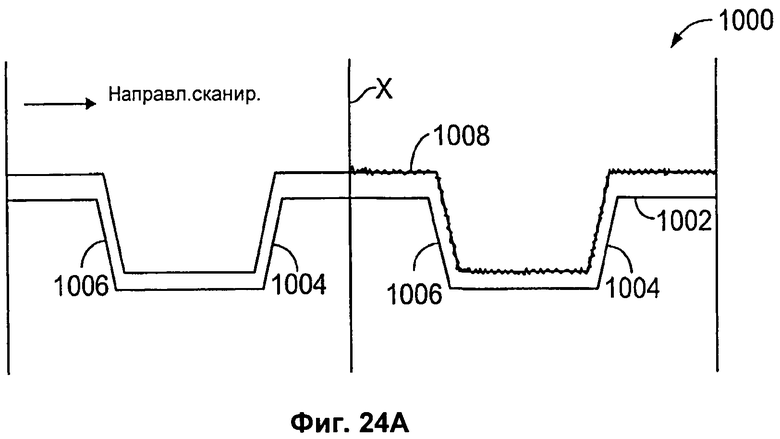
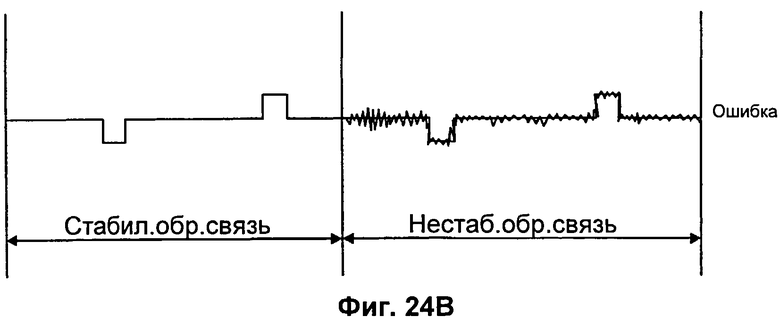
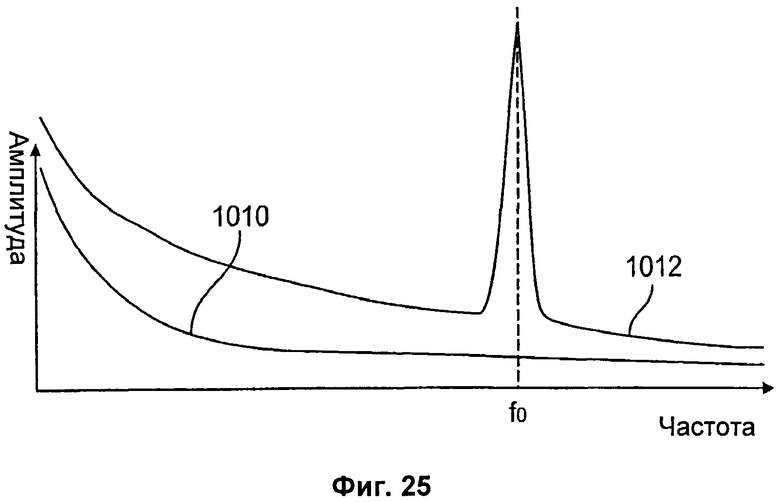
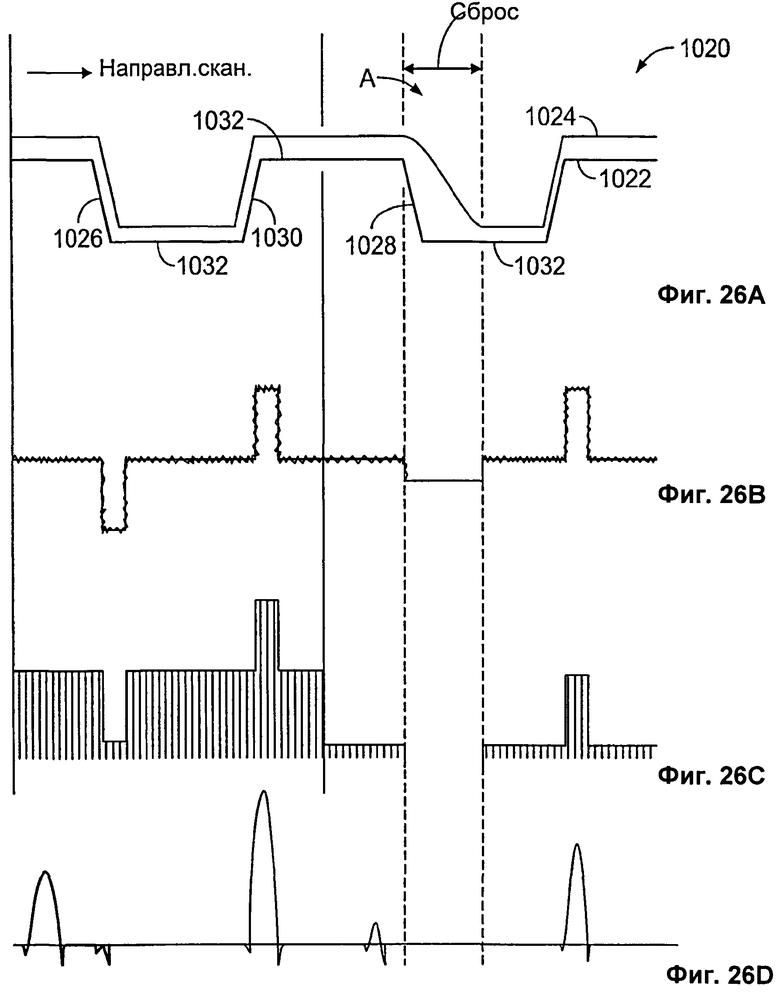
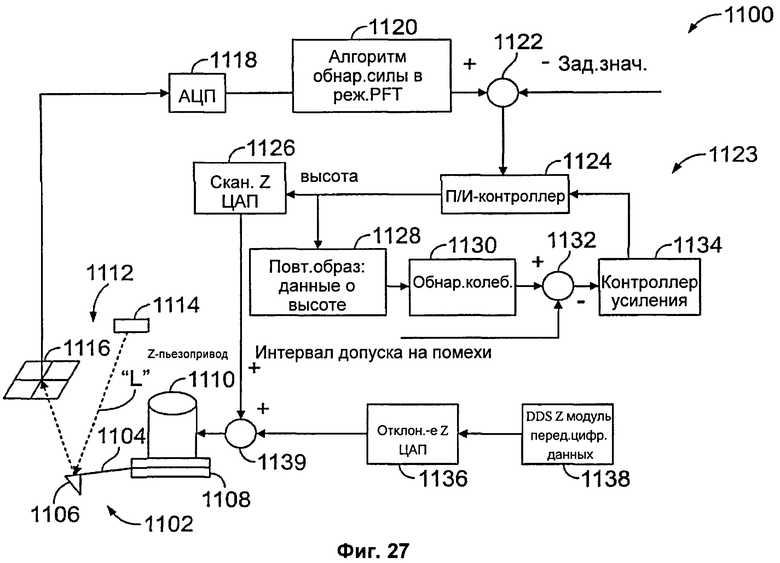
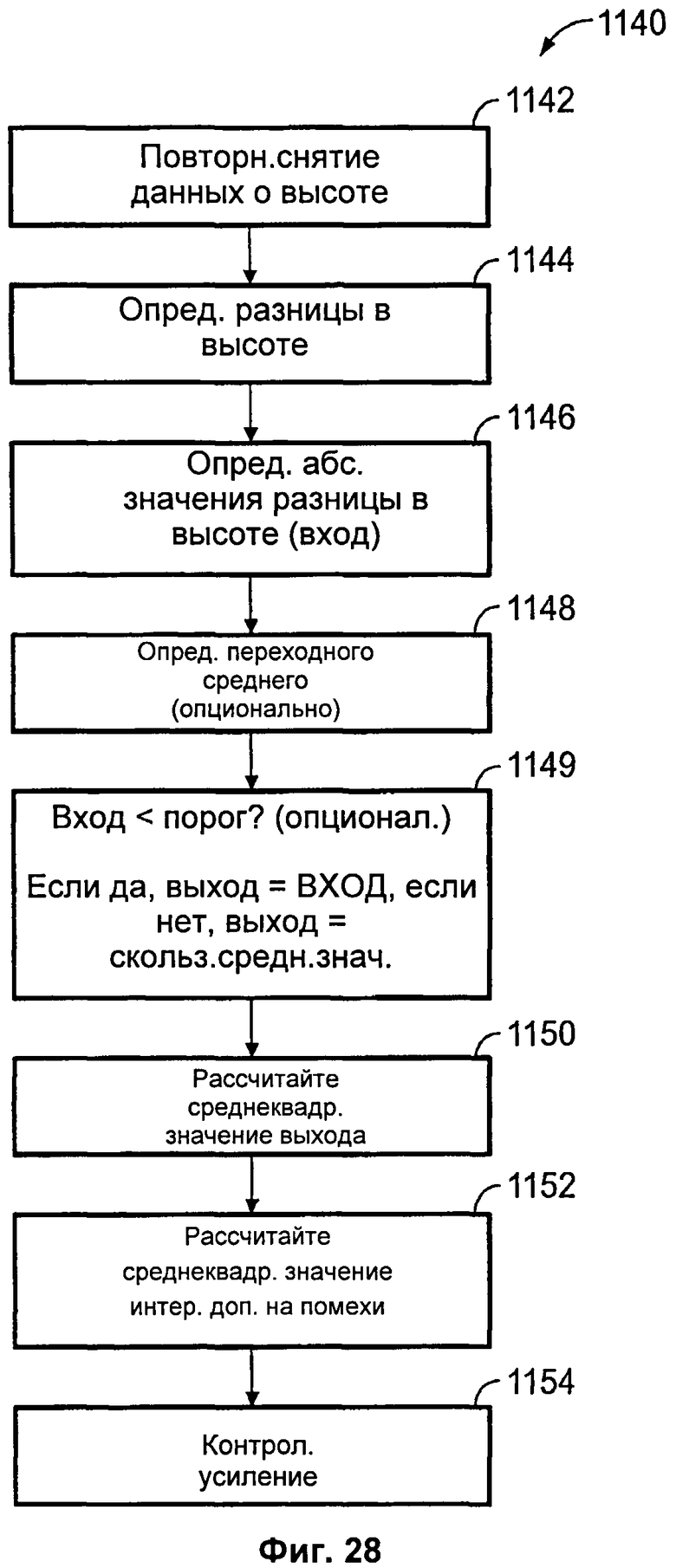
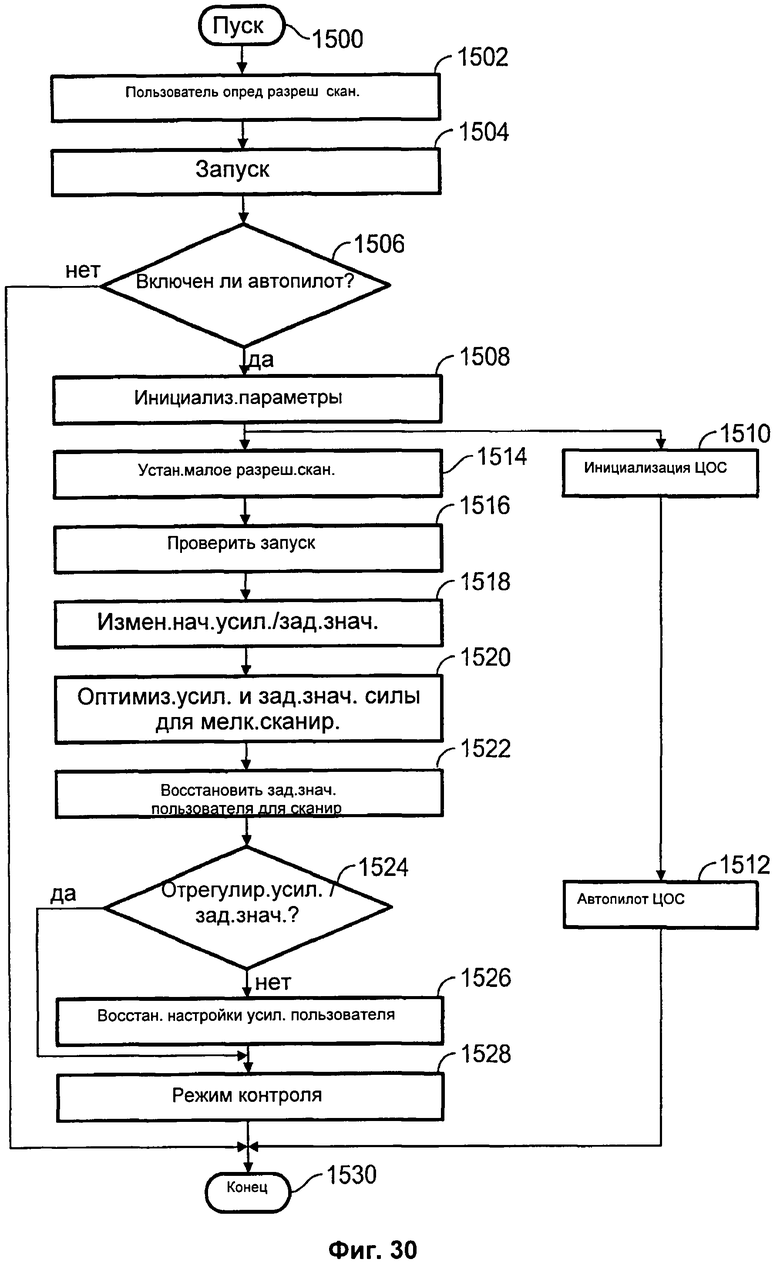
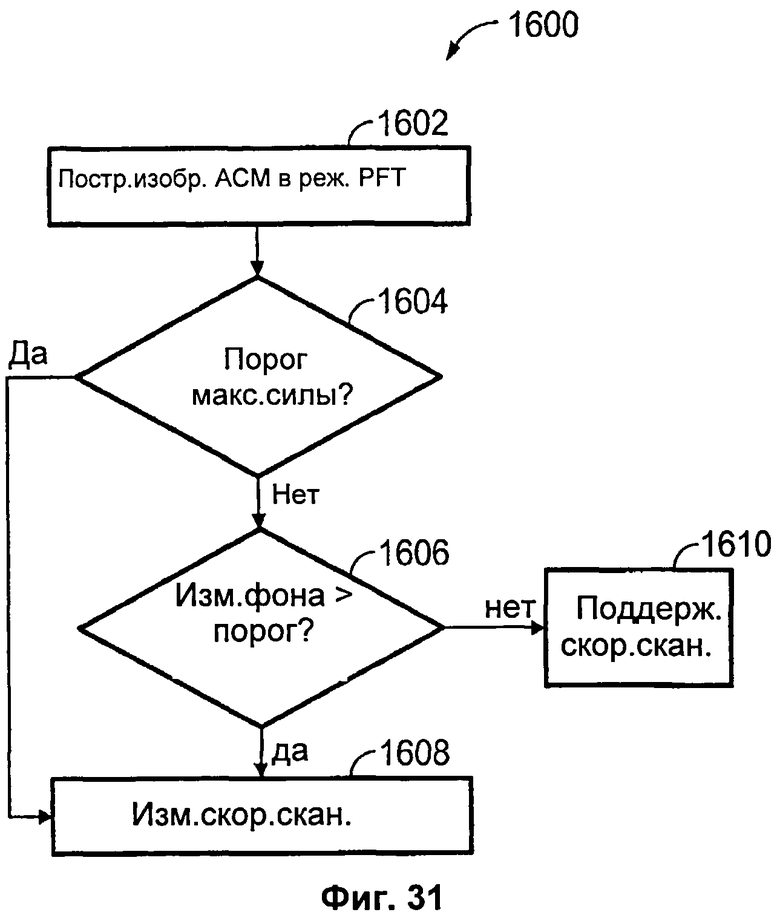
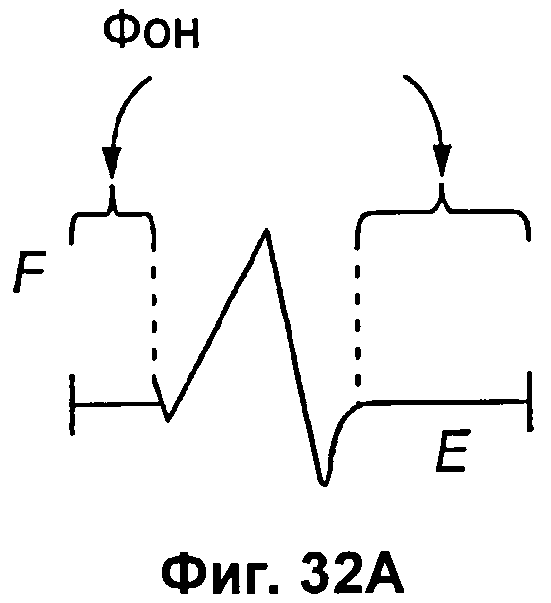
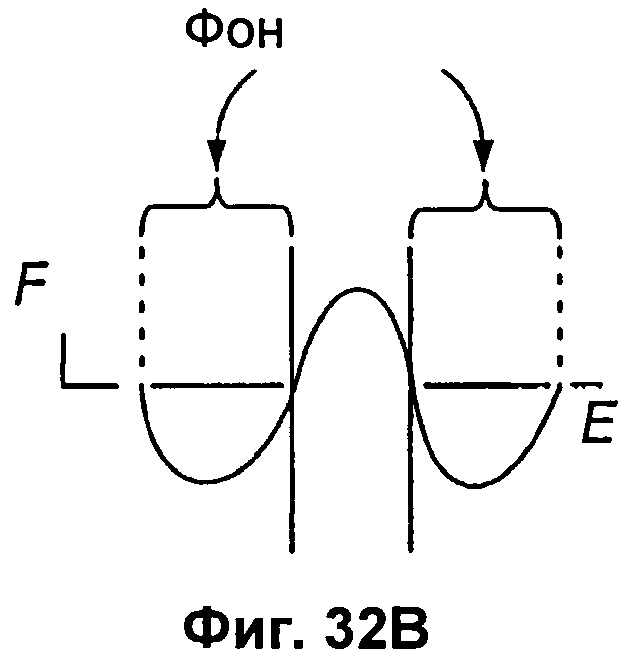
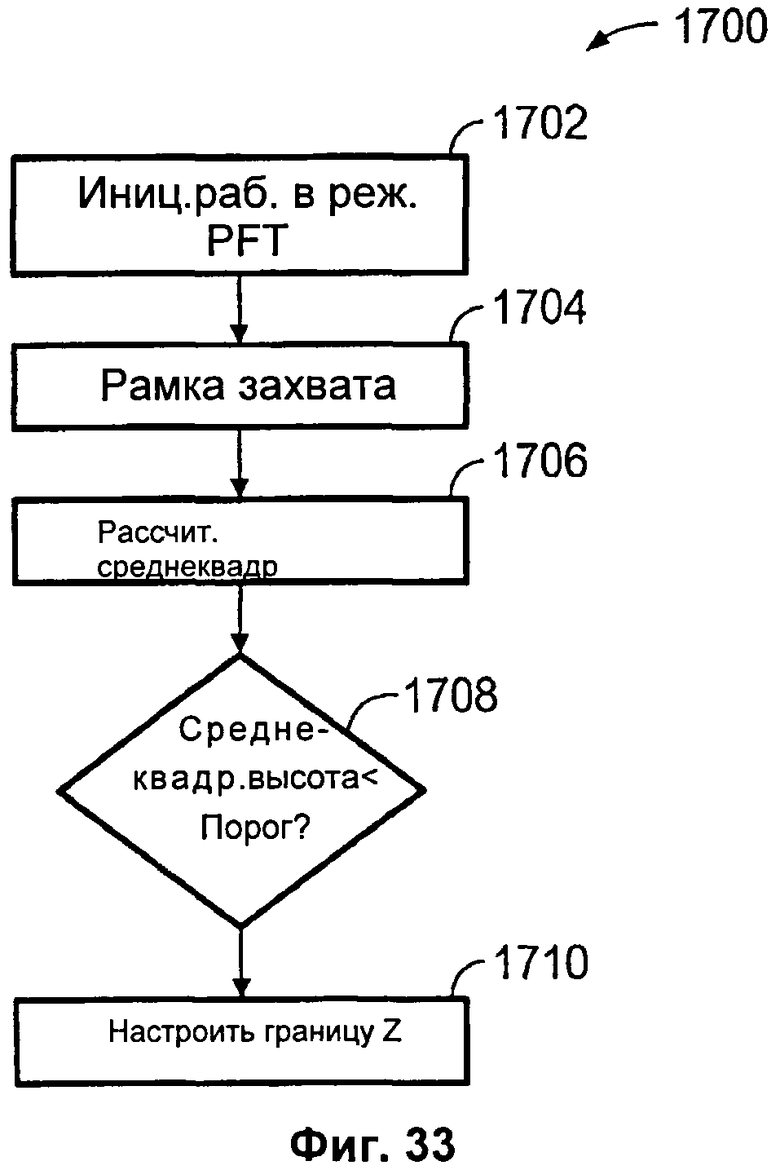
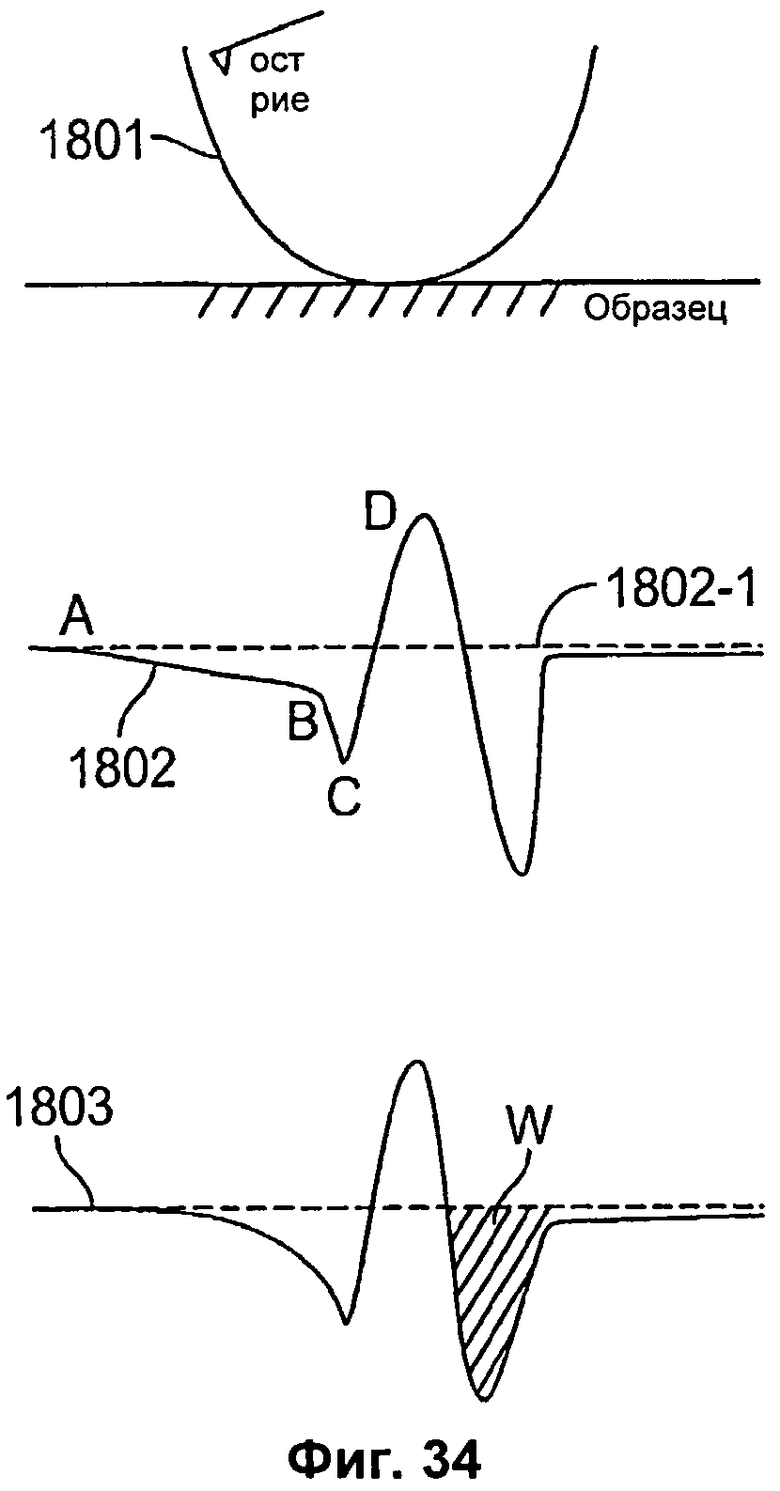
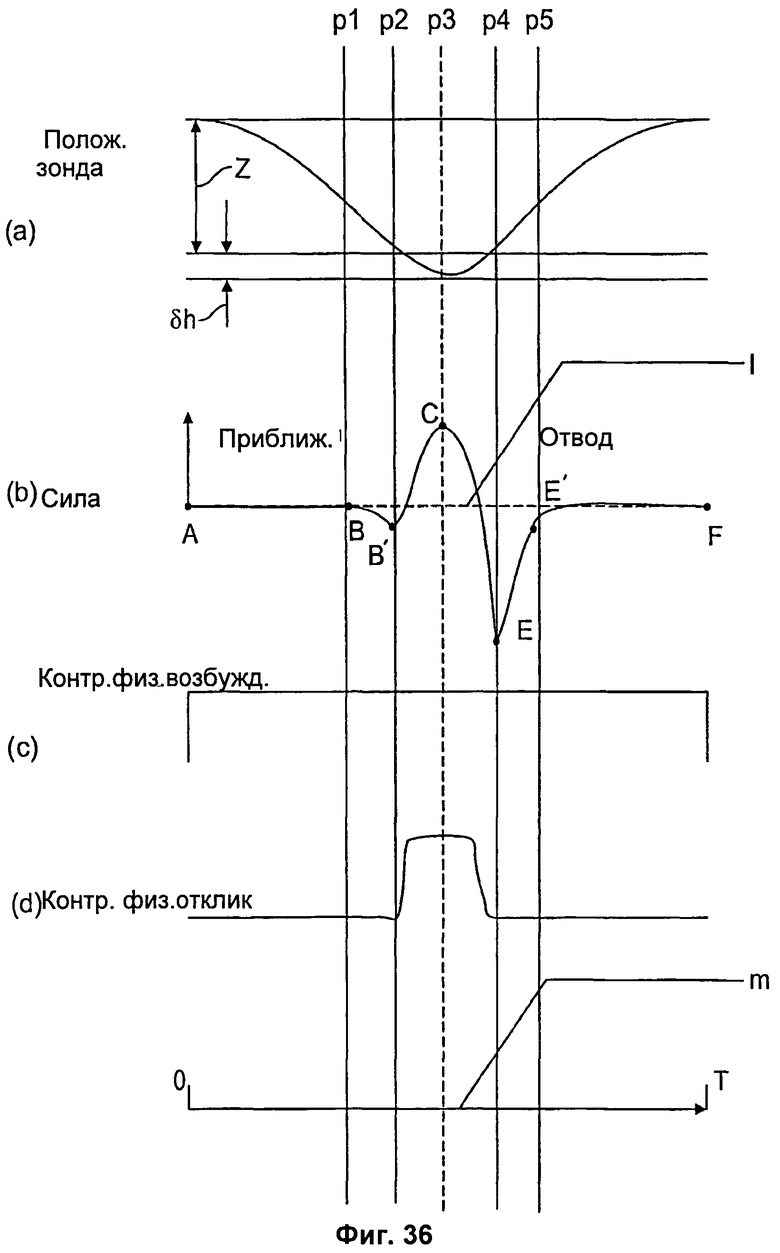
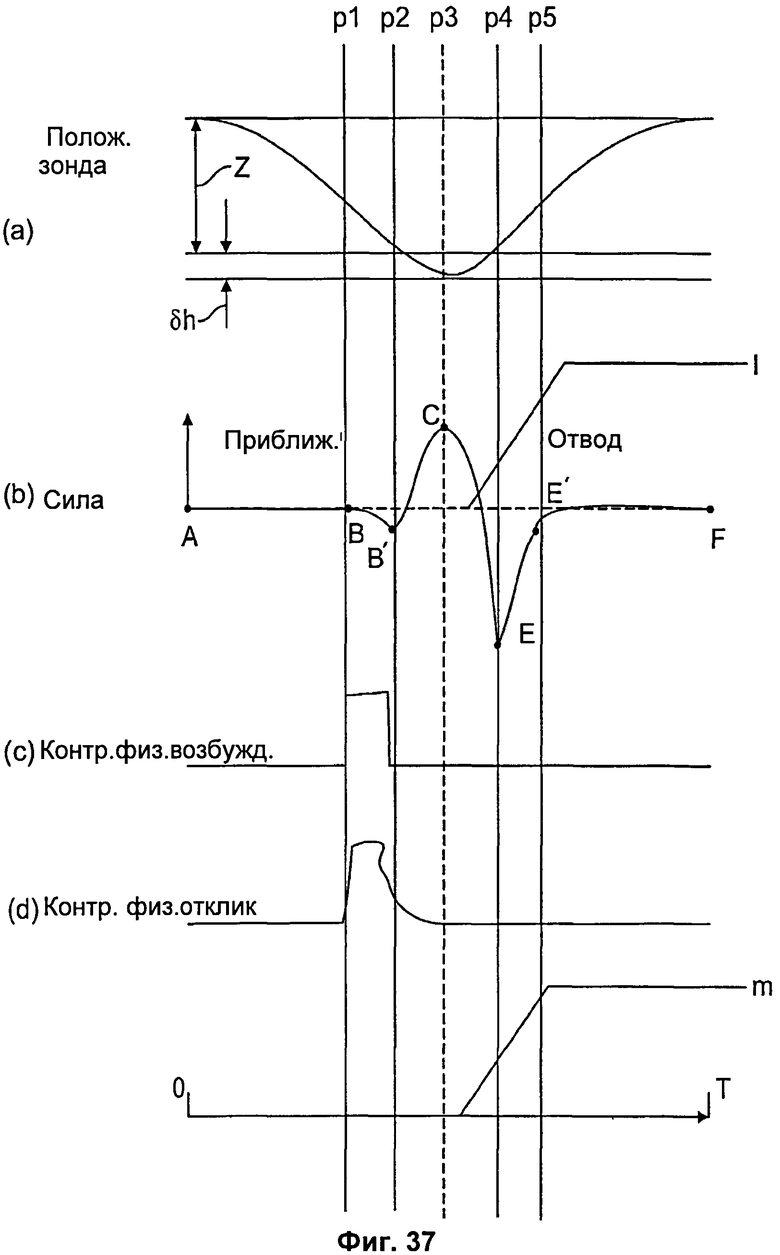
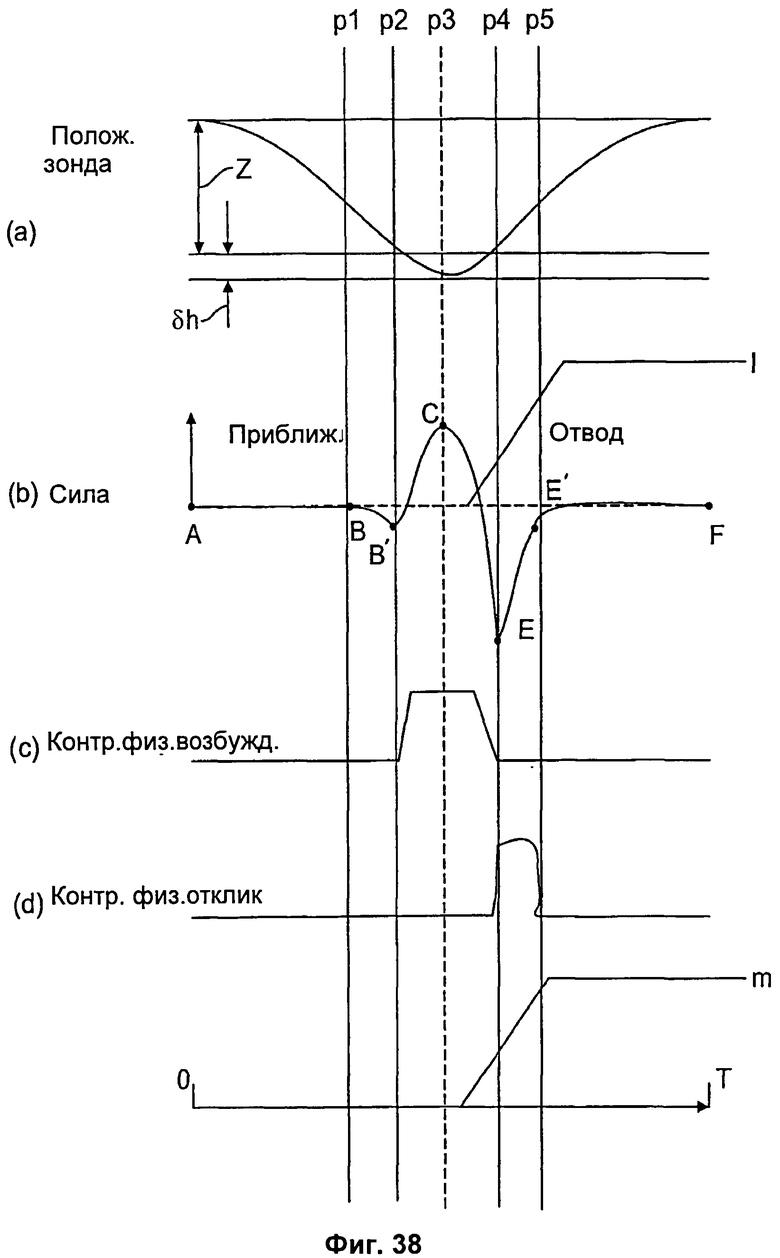
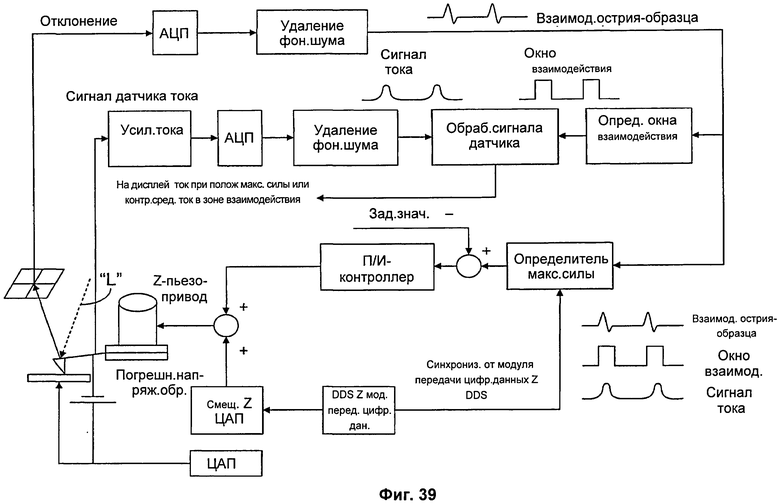
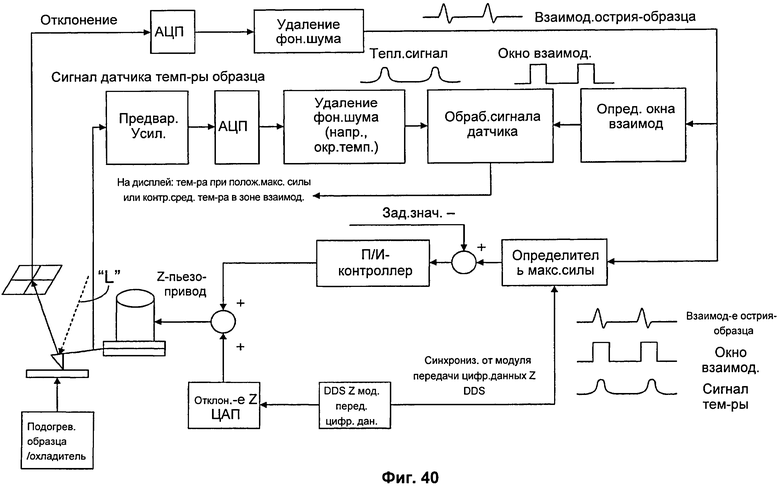
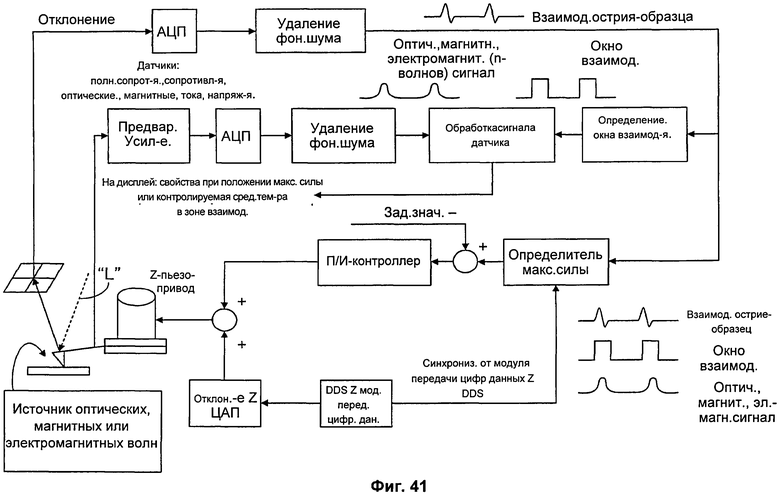
Изобретение относится к области сканирующей зондовой микроскопии. Согласно способу работы сканирующего зондового микроскопа генерируют относительное периодическое перемещение между зондом и образцом, детектируют перемещение зонда, восстанавливают из продетектированного перемещения зонда мгновенную силу между зондом и образцом при взаимодействии зонда и образца, определяют интересующую временную зону, связанную с восстановленной мгновенной силой, и стробируют ее. В качестве сигнала возбуждения используют тепло, подводимое к образцу или зонду, внешнее взаимодействующее поле, электромагнитную волну, оптическое возбуждение, сигнал напряжения или магнитную силу и измеряют контролируемый физический отклик зонда на этапе генерации в интересующей временной зоне в пределах периода взаимодействия между зондом и образцом. При этом сигналы, отличные от идущих с контролируемого участка, считаются паразитными шумами. Технический результат заключается в улучшении разрешения, повышении производительности сканирования. 3 н. и 13 з.п. ф-лы, 63 ил.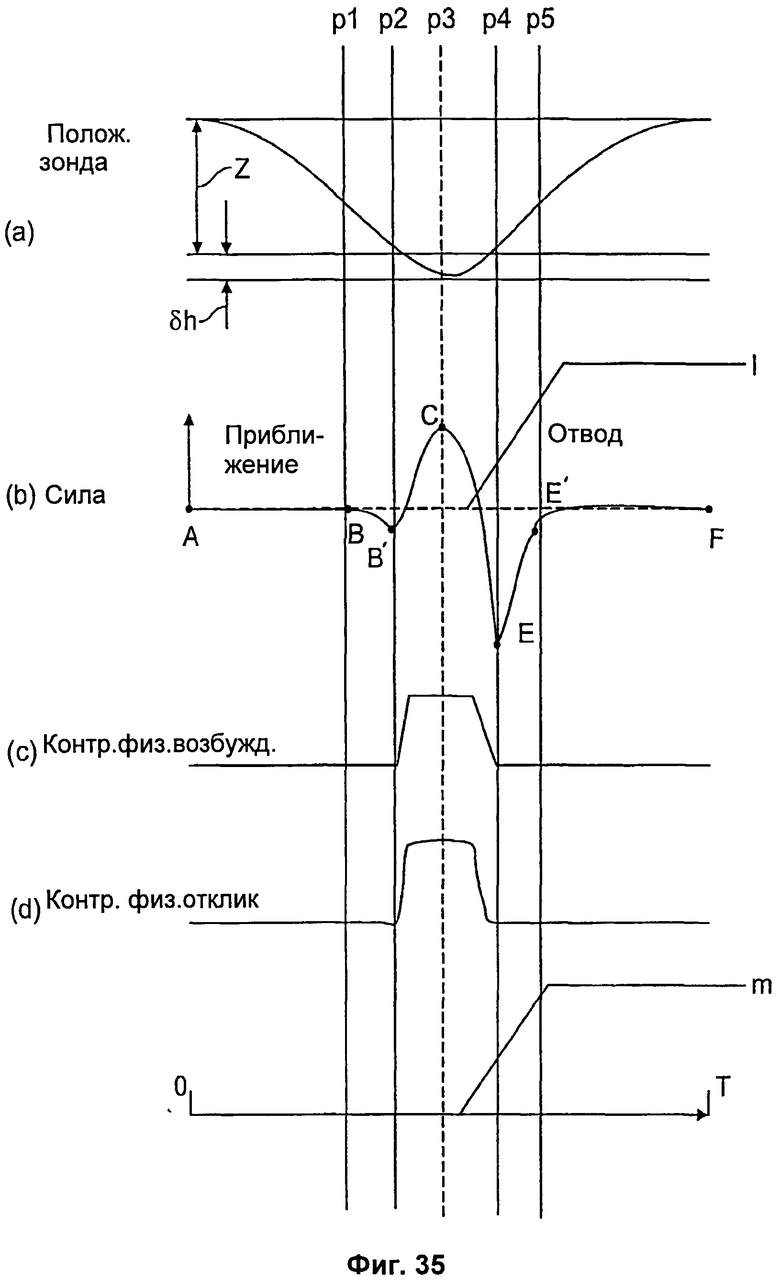
1. Способ работы сканирующего зондового микроскопа (СЗМ), содержащий:
генерирование относительного, по существу, периодического перемещения между зондом и образцом;
детектирование перемещения зонда;
восстановление из продетектированного перемещения зонда, по существу, мгновенной силы между зондом и образцом при взаимодействии зонда и образца;
определение интересующей временной зоны, связанной с восстановленной, по существу, мгновенной силой;
отличающийся тем, что интересующую временную зону стробируют, и
характеризующийся
генерированием регулируемого физического сигнала возбуждения между зондом и образцом, где в качестве сигнала возбуждения используют тепло, подводимое к образцу или зонду, внешнее взаимодействующее поле, электромагнитную волну, оптическое возбуждение, сигнал напряжения или магнитную силу; и
синхронным измерением контролируемого физического отклика зонда на этапе генерации в интересующей временной зоне в пределах периода взаимодействия между зондом и образцом, где сигналы, отличные от идущих с контролируемого участка, считаются паразитными шумами.
2. Способ по п. 1, где в качестве интересующей временной зоны используют время контакта (p1-р2).
3. Способ по п. 1, где в качестве интересующей временной зоны используют либо зону ближайшего взаимодействия при приближении (р2-р4), либо зону ближайшего взаимодействия при удалении острия (р4-р5).
4. Способ по п. 1, где в качестве регулируемого физического сигнала возбуждения используют один из группы, включающей постоянный сигнал напряжения и синхронно стробированный сигнал напряжения, и в качестве сигнала, связанного с продетектированным перемещением зонда, используют один из группы, включающей сигнал тока и сигнал сопротивления в стробированной интересующей временной зоне.
5. Способ по п. 1, где в качестве регулируемого физического сигнала возбуждения используют либо постоянный сигнал тепла, либо синхронно стробированный сигнал тепла, и в качестве сигнала, основанного на продетектированном перемещении зонда, используют сигнал температуры зонда в стробированной временной зоне.
6. Способ по п. 1, где в качестве регулируемого физического сигнала возбуждения используют либо постоянный сигнал микроволны, либо синхронно стробированный сигнал микроволны, и в качестве сигнала, основанного на продетектированном перемещении, используют сигнал сопротивления зонда в стробированной временной зоне.
7. Способ по п. 1, где в качестве регулируемого физического сигнала возбуждения используют либо постоянный оптический сигнал возбуждения, либо синхронно стробированный оптический сигнал возбуждения, и в качестве сигнала, основанного на продетектированном перемещении зонда, используют сигнал оптической спектроскопии, сгенерированный зондом в стробированной временной зоне.
8. Способ по п. 1, где в качестве регулируемого физического сигнала возбуждения используют магнитную силу, и в качестве сигнала, основанного на продетектированном перемещении зонда, используют один из группы, включающей электрический или магнитный отклик, сгенерированный зондом в стробированной временной зоне.
9. Способ по п. 1, где этап синхронного измерения обеспечивает одновременное измерение физических свойств образца, как определено на этапе генерации, и механических свойств образца.
10. Способ по п. 1, где контролируемый физический отклик зонда соответствует контролируемому среднему измеренному току.
11. Способ по п. 1, где контролируемый физический отклик зонда соответствует одному из максимальных токов или среднему току в одном цикле колебания зонда.
12. Способ по п. 1, где этап восстановления осуществляют при помощи полуконтактного режима с фиксированным пиком силы (PFT режима).
13. Способ работы сканирующего зондового микроскопа (СЗМ), содержащий:
генерирование относительного, по существу, периодического перемещения между зондом и образцом;
детектирование перемещения зонда;
восстановление, из продетектированного перемещения зонда, по существу, мгновенной силы между зондом и образцом при взаимодействии зонда и образца;
определение интересующей временной зоны, связанной с восстановленной, по существу, мгновенной силой;
генерирование сигнала возбуждения между зондом и образцом; и
синхронное измерение отклика зонда на этапе генерации в интересующей временной зоне в пределах периода взаимодействия между зондом и образцом; и
где интересующую временную зону стробируют, и в качестве регулируемого физического сигнала возбуждения используют один из группы, включающей постоянный сигнал напряжения и синхронно стробированный сигнал напряжения, и в качестве сигнала, связанного с продетектированным перемещением зонда, используют один из группы, включающей сигнал тока и сигнал сопротивления в стробированной интересующей временной зоне.
14. Способ по п. 13, где этап восстановления осуществляют при помощи полуконтактного режима с фиксированным пиком силы (PFT режима).
15. Способ работы сканирующего зондового микроскопа (СЗМ), содержащий:
генерирование относительного, по существу, периодического перемещения между зондом и образцом;
детектирование перемещения зонда;
восстановление из продетектированного перемещения зонда, по существу, мгновенной силы между зондом и образцом при взаимодействии зонда и образца;
определение интересующей временной зоны, связанной с восстановленной, по существу, мгновенной силой;
генерирование сигнала возбуждения между зондом и образцом; и синхронное измерение отклика зонда на этапе генерации в интересующей временной зоне в пределах периода взаимодействия между зондом и образцом; и
где интересующую временную зону стробируют, и в качестве сигнала возбуждения используют один из группы, включающей: а) постоянный сигнал тепла и синхронно стробированный сигнал тепла; б) постоянный сигнал микроволны и синхронно стробированный сигнал микроволны; в) постоянный оптический сигнал возбуждения и синхронно стробированный оптический сигнал возбуждения, и где в качестве сигнала, основанного на продетектированном перемещении зонда, используют соответственно а) сигнал температуры зонда в стробированной временной зоне, б) сигнал сопротивления зонда в стробированной временной зоне, и в) сигнал оптической спектроскопии, сгенерированный зондом в стробированной временной зоне.
16. Способ по п. 15, где этап восстановления осуществляют при помощи полуконтактного режима с фиксированным пиком силы (PFT режима).
| WO 2010057052 A2, 20.05.2010 | |||
| WO 2003067224 A1, 01.12.2004 | |||
| US 20020021139 A1, 21.02.2002. |

