Изобретение относится к авиационной технике, в частности к аварийному покиданию, и может найти применение при катапультировании летного состава на больших высотах из летательных аппаратов.
Система стабилизации должна обеспечивать устойчивое положение катапультного кресла при катапультировании как на начальном участке после отделения от самолета, так и в дальнейшем при спуске с больших высот вплоть до ввода спасательного парашюта и отделения летчика от кресла.
Известен способ стабилизации катапультного кресла, заключающийся в стабилизации кресла введением в действие небольшого парашюта, крепящегося к каркасу кресла при помощи двух- или трехзвенной уздечки и соединительного фала длиной 4 м, позволяющей обеспечить работу парашюта вне аэродинамического следа, создаваемого катапультным креслом (американские катапультные кресла типа SIVS, ACESII (DOUGLAS AIRCRAFT COMPANY. Advanced concept ejection seat ACESII. Report MDC J4576 Revision D, March 1988) или английские катапультные кресла типа Mk12, Mk16 (MARTIN-BAKER'S MK16 ejection seat is the firm's most sophisticated ever. FLIGHT INTERNATIONAL, 18-24 June 1997)).
Этот способ имеет ряд недостатков.
1. Продольные габариты мягких элементов, образующих систему - звенья уздечки, соединительный фал, парашют со стропами - обеспечивают общую длину разворачиваемой конструкции 6-8 метров, что требует для начала ее эффективной работы достаточно продолжительного времени.
2. При возможном сложном пространственном угловом и линейном движении самолета в момент аварии и катапультного кресла с летчиком после катапультирования существует большая вероятность контакта и возможного зацепления такой большой мягкой конструкции за элементы самолета и катапультного кресла.
3. На самом важном этапе катапультирования, в начальный момент при движении вблизи самолета, катапультное кресло оказывается нестабилизированным.
4. Из-за небольших размеров катапультного кресла, особенно поперечных, такая система не может обеспечить необходимых запасов статической устойчивости кресла по углам атаки и скольжения.
Известен также способ стабилизации катапультного кресла, принятый за прототип, заключающийся в стабилизации кресла введением в действие двух стабилизирующих парашютов, расположенных на концах двух стабилизирующих телескопических штанг (российские катапультные кресла типа К-36, например, кресло К-36Д-3.5 (Катапультное кресло К-ЗбД-3,5. Руководство по технической эксплуатации 903-9200-1000.0 РЭ. Издательство ОАО «НПП «Звезда», 1999 г.)).
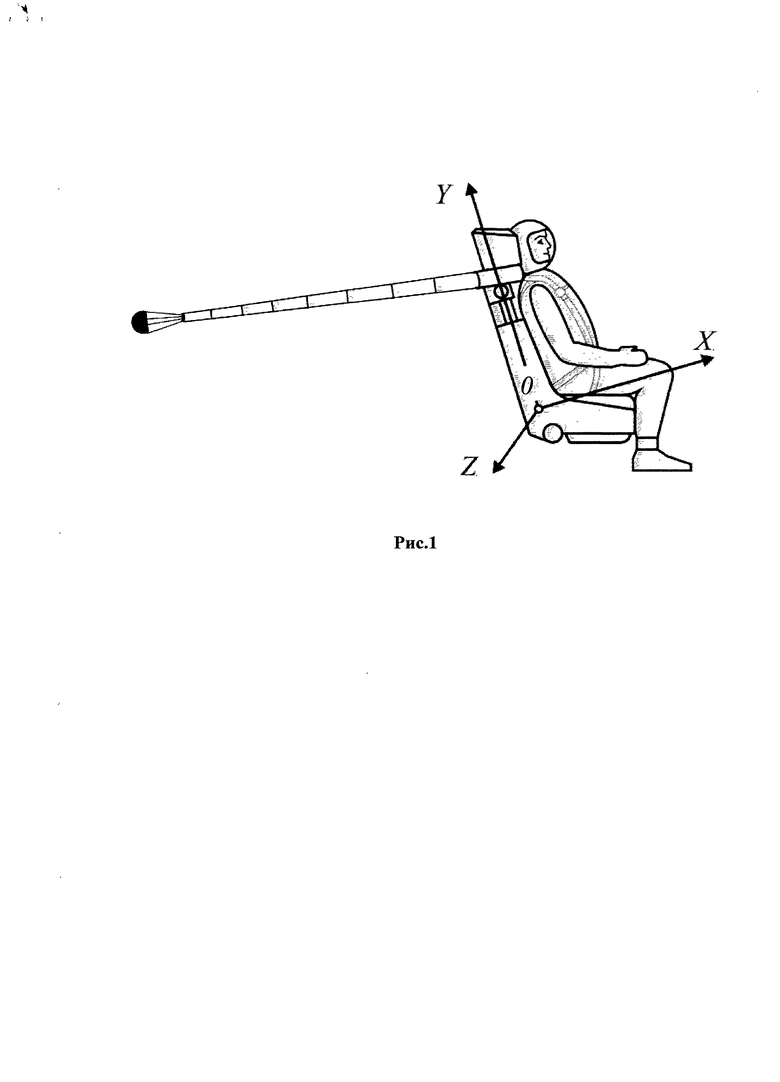
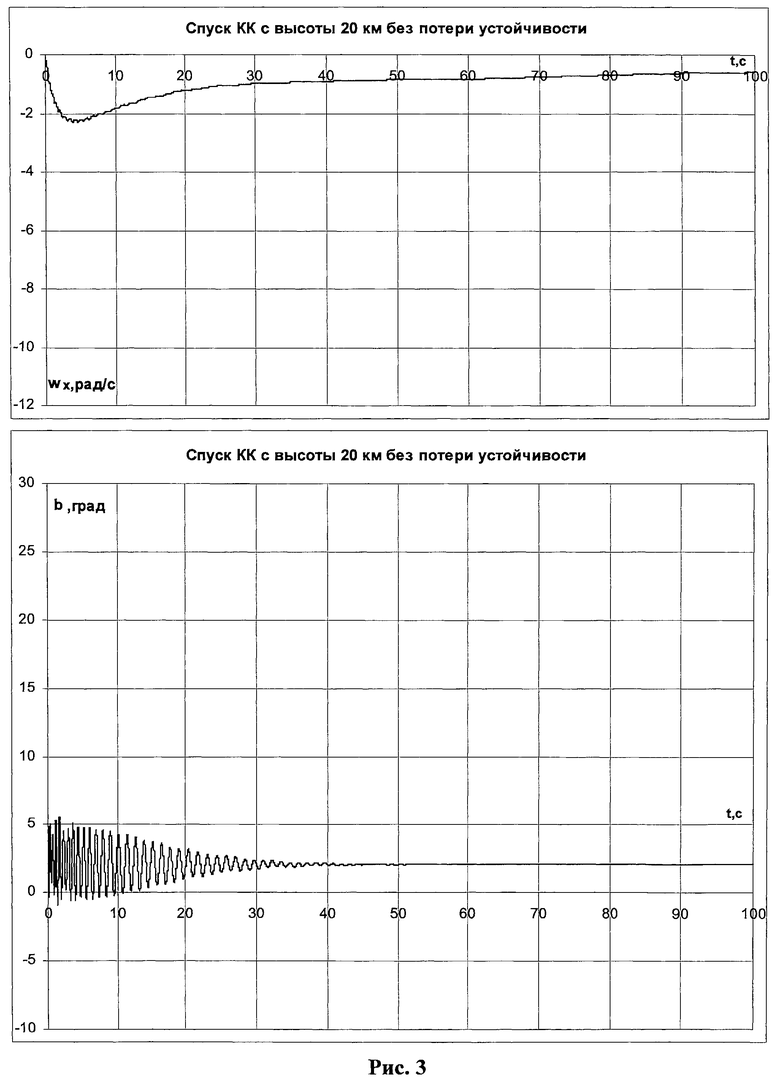
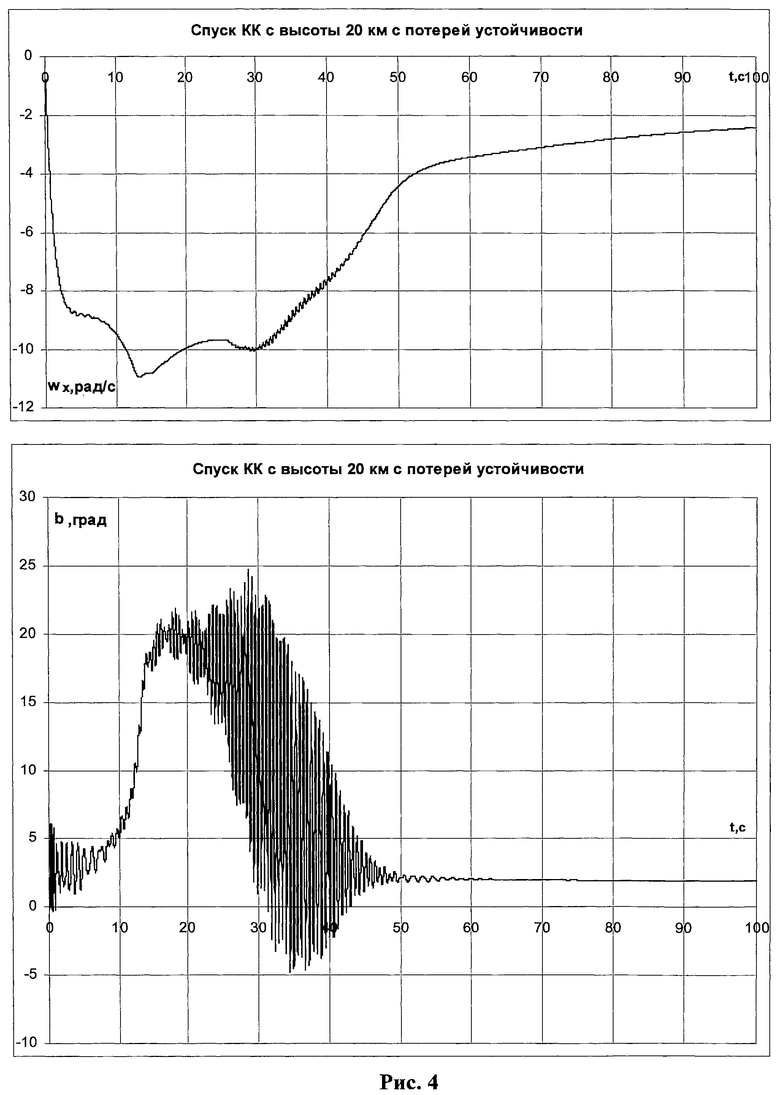
Основным недостатком этих способов стабилизации катапультного кресла является то, что стабилизация осуществляется только за счет парашютов и при спуске с больших высот обеспечивается стабилизирующий аэродинамический момент относительно связанных осей OY и OZ, по оси ОХ стабилизация отсутствует (рис.1.), что может приводить к развитию интенсивного углового движения по крену и последующей потере устойчивости относительно других осей. На рис.3 показан случай, когда при спуске с высоты 20 км кресло устойчиво. Однако спуск с относительно большой скоростью при определенных массово-инерционных характеристиках системы может привести в случае наличия определенной аэродинамической несимметрии системы «летчик - катапультное кресло» относительно продольной плоскости X0Y и отсутствия стабилизации системы относительно оси ОХ к развитию углового движения по крену, которое может спровоцировать потерю устойчивости по углу скольжения b (рис.4), что приведет к дальнейшему снижению катапультного кресла с недопустимо большими для летчика угловыми скоростями.
Задачей изобретения является создание системы стабилизации, обеспечивающей стабилизированный устойчивый спуск с больших высот при катапультировании летного состава в случае аварийного покидания летательного аппарата.
В соответствии с предлагаемым способом стабилизация относительно осей OY и OZ осуществляется введением в действие стабилизирующих парашютов, расположенных на стабилизирующих телескопических штангах, а относительно связанной оси OX - включением импульсных двигателей бокового разворота от управляющего сигнала, подаваемого датчиком угловой скорости релейного типа при достижении катапультным креслом угловой скорости определенной величины относительно оси ОХ, причем для выработки сигнала используют алгоритмы работы системы, доработанные таким образом, что в зависимости от высоты катапультирования и с учетом реального углового движения относительно оси ОХ задается режим работы: для одноместных самолетов - управление по крену при катапультировании с малых высот, либо парирование угловой скорости Wx при катапультировании с больших высот; для многоместных самолетов - разведение траекторий при катапультировании с малых высот, либо задержка между катапультированиями членов экипажа на больших высотах.
Система стабилизации катапультного кресла в соответствии с предлагаемым способом содержит стабилизирующие парашюты 2, расположенные на стабилизирующих телескопических штангах 1, двигатели бокового разворота 3, датчик угловой скорости релейного типа 4 (рис.2).
Двигатели бокового разворота и существующие алгоритмы работы системы автоматики катапультного кресла применяются при катапультировании на малых высотах только для управления по крену с целью уменьшения потери высоты.
В предлагаемой системе двигатели бокового разворота, включаемые от сигнала релейного датчика, в соответствии с доработанными алгоритмами работы системы автоматики обеспечивают однократное парирование развившейся в процессе спуска с больших высот угловой скорости Wx катапультного кресла.
Система работает следующим образом.
При катапультировании, используя информацию с борта самолета о высоте полета в момент аварии, система автоматики катапультного кресла выбирает режим функционирования: либо сохраняет схему функционирования в обычном режиме, либо переходит в высотный режим.
При работе в высотном режиме для многоместного самолета система автоматики выдает команду на увеличение временной задержки между последовательными катапультированиями двух членов экипажа, которая реализуется блоком логики покидания, расположенным на борту самолета, и начинает анализировать сигнал датчика угловой скорости Wx. При этом двигатели бокового разворота могут быть включены лишь по управляющему сигналу датчика угловой скорости.
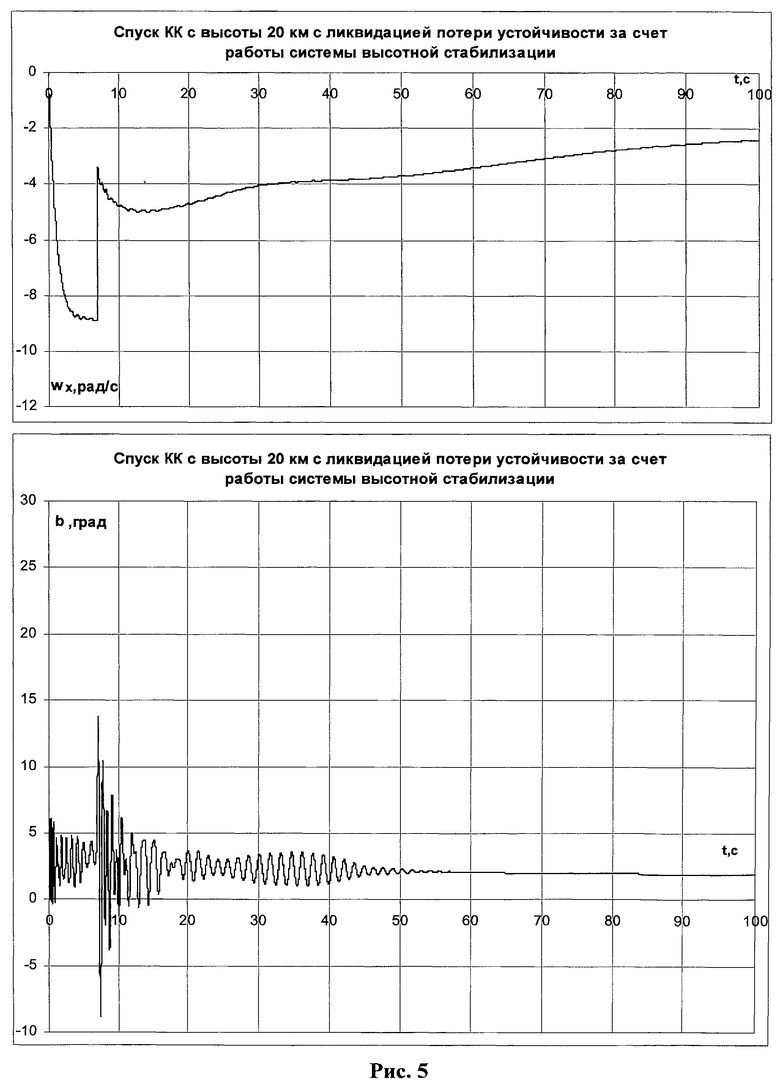
Поэтому, как для многоместных, так и для одноместных самолетов, если в процессе катапультирования или при последующем спуске с больших высот катапультное кресло приобретает излишне большую скорость Wx, по сигналу датчика угловой скорости вырабатывается управляющая команда на включение одного из двух двигателей бокового разворота, парирующего развитие угловой скорости Wx. В результате происходит импульсное уменьшение по модулю значения этой угловой скорости на величину порядка 5 рад/с, определяемую энергетическими возможностями применяемых на креслах К-36Д-3.5 двигателей бокового разворота.
Как показывают проведенные численные оценки динамики катапультирований с высоты 20 км, однократное уменьшение угловой скорости Wx достаточно для того, чтобы исключить потерю устойчивости катапультного кресла при последующем его снижении.
Рис.5 демонстрирует ситуацию, когда при спуске катапультного кресла с высоты 20 км срабатывает система стабилизации, которая предотвращает потерю устойчивости.
Таким образом, предлагаемые способ и система стабилизации катапультного кресла позволяют обеспечить стабилизированный устойчивый спуск с больших высот при катапультировании летного состава в случае аварийного покидания летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАТАПУЛЬТНОЕ КРЕСЛО | 1997 |
|
RU2116938C1 |
| СПОСОБ ТОРМОЖЕНИЯ КАТАПУЛЬТНОГО КРЕСЛА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2500583C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ КАТАПУЛЬТНОГО КРЕСЛА | 1997 |
|
RU2116939C1 |
| КАТАПУЛЬТНОЕ КРЕСЛО | 1989 |
|
SU1760731A1 |
| СПОСОБ И СИСТЕМА АВАРИЙНОГО ПОКИДАНИЯ САМОЛЕТА С ЧЕТЫРЬМЯ ЧЛЕНАМИ ЭКИПАЖА | 2016 |
|
RU2644211C1 |
| Способ и система приземления парашютиста | 2017 |
|
RU2671896C1 |
| СПОСОБ ВЫРАБОТКИ КОМАНДЫ НА ВВОД ПАРАШЮТА КАТАПУЛЬТНОГО КРЕСЛА | 2004 |
|
RU2280592C1 |
| СПОСОБ СНИЖЕНИЯ ВЕРТИКАЛЬНОЙ СКОРОСТИ ПРИЗЕМЛЕНИЯ ЛЕТЧИКА ПОСЛЕ КАТАПУЛЬТИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2544076C1 |
| СПОСОБ И СИСТЕМА ИНФОРМИРОВАНИЯ ЭКИПАЖА О БЕЗОПАСНОСТИ КАТАПУЛЬТИРОВАНИЯ | 2021 |
|
RU2774269C1 |
| СПОСОБ И СИСТЕМА КАТАПУЛЬТИРОВАНИЯ НА БОЛЬШИХ ИНДИКАТОРНЫХ СКОРОСТЯХ ПОЛЕТА | 2022 |
|
RU2788230C1 |
Изобретения относятся к области авиации, в частности к системе и способу высотной стабилизации катапультного кресла. Способ высотной стабилизации катапультного кресла заключается в стабилизации кресла по осям OY и OZ при помощи двух стабилизирующих парашютов, расположенных на стабилизирующих телескопических штангах. Стабилизацию дополнительно осуществляют относительно оси ОХ включением импульсных двигателей бокового разворота от управляющего сигнала датчика угловой скорости релейного типа. Система высотной стабилизации катапультного кресла содержит две стабилизирующие телескопические штанги со стабилизирующими парашютами. В систему дополнительно встроен релейный датчик угловой скорости катапультного кресла, подающий управляющий сигнал системе автоматики, которая в соответствии с доработанными алгоритмами управляет импульсными двигателями бокового разворота. Технический результат заключается в предотвращении потери устойчивости катапультного кресла и обеспечении спуска с больших высот с приемлемыми угловыми скоростями движения кресла. 2 н.п. ф-лы, 5 ил.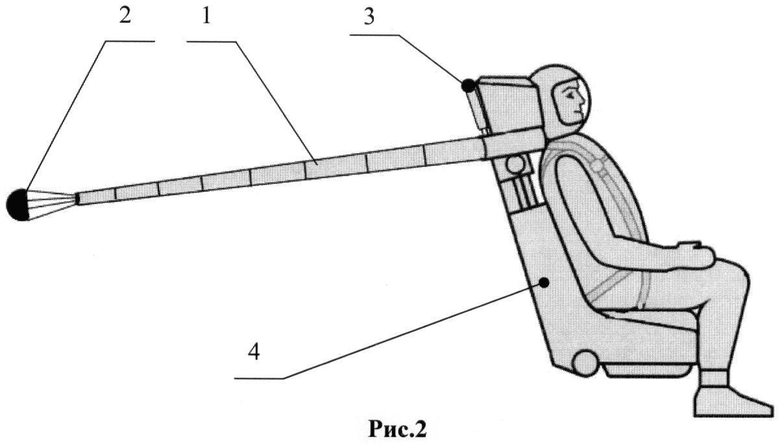
1. Способ высотной стабилизации катапультного кресла, включающий стабилизацию кресла по осям OY и OZ при помощи двух стабилизирующих парашютов, расположенных на стабилизирующих телескопических штангах, отличающийся тем, что стабилизацию дополнительно осуществляют относительно оси ОХ включением импульсных двигателей бокового разворота от управляющего сигнала датчика угловой скорости релейного типа.
2. Система высотной стабилизации катапультного кресла, содержащая две стабилизирующие телескопические штанги со стабилизирующими парашютами, отличающаяся тем, что в систему дополнительно встроен релейный датчик угловой скорости катапультного кресла, подающий управляющий сигнал системе автоматики, которая в соответствии с доработанными алгоритмами управляет импульсными двигателями бокового разворота.
| СИСТЕМА УПРАВЛЕНИЯ КАТАПУЛЬТИРУЕМЫМ КРЕСЛОМ СПАСЕНИЯ ЭКИПАЖА | 1999 |
|
RU2149804C1 |
| US 4236687 A, 02.12.1980 | |||
| US4667903 A, 26.05.1987 | |||
| US 2009072087 A1, 19.03.2009. | |||

